
Multi-device Power-saving
An Investigation in Energy Consumption Optimisation
Jean-Marc Andreoli and Guillaume Bouchard
Xerox Research Centre Europe, Grenoble, France
Keywords:
Energy Consumption Modelling, Sequential Decision Processes, Exact Multi-dimensional Optimisation.
Abstract:
We are interested here in the problem of optimising the energy consumption of a set of service offering de-
vices. Our target is a printing device infrastructure as typically found in a medium or large office, where all
the devices are connected to the network, and clients can submit jobs to individual devices through that net-
work. We formulate a cost optimisation problem to find a trade-off between the energy consumption of the
infrastructure and the cost of allocating jobs to devices. The latter cost results from the potential gap between
the expectation of the clients and the quality of the service delivered by the devices. We present a model of
some of the typical constraints occurring in such a system. We then present a method to solve the optimisation
problem under these constraints, and conclude the paper with some experimental results.
1 INTRODUCTION
1.1 Description of the Problem
We are interested here in the problem of optimising
the operation of a set of service offering devices. Our
target is a printing device infrastructure as typically
found in a medium or large office, where all the de-
vices are connected to the network, and clients can
submit jobs to individual devices through that net-
work. In the sequel, we use that target application
to illustrate our approach, although it may apply to
other contexts as well. Our goal is to design a con-
troller which processes jobs (service requests) and ad-
justs devices (service providers) in some optimal way
which minimises the total cost of operation of the in-
frastructure. There are two main sources of control-
lable cost:
• Each device has a specific energy consumption
profile which defines several operations modes,
each with its own consumption rate and transition
cost to other modes. Typically, a device can be
either in “working” mode, when it is performing
some work for a client (printing), or in one of sev-
eral “waiting” modes, where it is simply waiting
for a new job to arrive. The waiting modes have
different energy consumption patterns. We look at
the simple case where there are only two waiting
modes:
ready
and
sleep
. In
ready
mode, the
energy consumption rate is higher than in
sleep
mode, but when a new job is assigned to the de-
vice, the wake up energy consumption is lower.
To control the energy consumption cost, we as-
sume that the controller has the ability to switch
at any time any device in
ready
mode to
sleep
mode.
• Each client is characterised by an assignment util-
ity function which indicates, for each device and
job, the adequacy of assigning that job to that de-
vice, from the point of view of the client. For ex-
ample, if the job is in colour and device B is black
and white only or does not support the full palette,
while device A does, the client estimates the cost
incurred by assigning the job to B instead of A.
This amounts to quantifying the loss of quality of
the printed document, the cost of which depends
on the intended use of the document. Similarly,
if the job has a high resolution beyond the reach
of device B but within that of A (loss of quality,
again), or if B is physically much further from the
client than A for collection (loss of time). Full
elicitation of the utility function of each client is
not realistic. Instead, we assume that each job
comes together with a cost menu, i.e. a mapping
which specifies for each device the client estimate
of the cost of assigning that job to that device. To
control the assignment cost, we assume that the
assignment of each job is performed by the con-
troller when presented the cost menu of the job.
232
Andreoli J. and Bouchard G..
Multi-device Power-saving - An Investigation in Energy Consumption Optimisation.
DOI: 10.5220/0004042002320237
In Proceedings of the 9th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2012), pages 232-237
ISBN: 978-989-8565-21-1
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

• The total cost of operation of the device infras-
tructure depends on the energy consumption char-
acteristics of the infrastructure on the one hand, on
the client assignment utility functions on the other
hand, and, of course, on the actual demand, i.e.
the sequence of jobs. Demand is intrinsically non
deterministic, and may evolve over time, but we
assume here that it is governed by some stationary
stochastic process which can be learnt from obser-
vation over a sufficiently long period of time.
We seek to develop a controller which is in charge of
both assigning devices to jobs and dynamically set-
ting timeouts, in such a way as to minimise the total
cost of operation, i.e. the sum of the energy consump-
tion cost and the job assignment cost.
1.2 Related Work
Dynamic power management has been the topic of
numerous investigations (Benini et al., 2000) and oc-
curs in many contexts: electronic design (Wang et al.,
2011), data centre management (Raghavendra et al.,
2008; Urgaonkar et al., 2010), wireless sensor net-
works (Sinha and Chandrakasan, 2001). The prob-
lem we tackle in this paper shares many concepts
with DPM. As DPM, we seek the optimal control
of the energy consumption of a set of hardware de-
vices with controllable energy consumption regimes,
under a stochastic flow of service requests, each of
which being satisfied by a controllable subset of de-
vices (actually, exactly one device per request in our
case). However, unlike many DPM studies, our as-
sumptions derive from a rarely studied, although quite
frequent configuration, where requests come together
with soft allocation constraints in the form of cost
menus, and the devices can at any time be dynami-
cally reprogrammed for energy optimisation. Our so-
lution relies on a very generic technique for sequen-
tial decision problems, known as Markov Decisions
Processes (MDP), widely investigated in the litera-
ture (Bertsekas, 2005; B¨auerle and Rieder, 2011), and
which is also used by many other DPM solutions.
We assume the simplest flavour of MDPs, where the
stochastic demand is assumed known in advance, typ-
ically learnt from the observation of past sequences.
We focus instead on the problem of simultaneously
optimising the set of devices at each step of the deci-
sion process, allowing the revision of the energy con-
sumption regime of all the devices each time a request
is submitted.
2 PROBLEM MODELLING
2.1 Parametrisation
At any time, a device has a mode which is either
ready
or
sleep
. Each device k=1:K is characterised
by:
• a
k
: cost rate in
ready
mode; a
k
: cost rate in
sleep
mode; we have a
k
< a
k
and we let a
k
= a
k
− a
k
;
•
ˇ
b
k
: cost of jump from
ready
to
sleep
;
ˆ
b
k
: cost of
jump from
sleep
to
ready
;
Let g
k
(x, τ) the overhead cost of maintaining device k
in
ready
mode during up to τ time units over a period
of x time units. We have:
g
k
(x, τ) =
def
I[x < τ]a
k
x+ I[x ≥ τ](a
k
τ+
ˇ
b
k
)
The device infrastructure receives job requests in se-
quence. For the n-th request in the sequence, let X
n
∈
R
+
be the time elapsed since the previous request; let
J
n
be the total information available about the associ-
ated job (both about its content and its client); and let
C
n
be the client cost menu which is the K-dimensional
vector whose k-th component for k=1:K holds the
client estimate of the cost of assigning job J
n
to de-
vice k.
• We assume that the random variable O
n
=
(XJC)
1:n
, which captures all that has been ob-
served just after the n-th request, can be determin-
istically summarised by a single state variable Z
n
,
called the demand state, which may live in an ar-
bitrary space Z , and which satisfies the following
Markov condition
p(O
n
|O
n−1
) = p(X
n
Z
n
|Z
n−1
)p(J
n
|Z
n
)p(C
n
|Z
n
)
Thus, state Z
n
summarises all the information of
the past demand which has an impact on the fu-
ture demand. The choice of a good demand state
space Z and model satisfying the Markov assump-
tions depends on the characteristics of the actual
demand.
• We further assume that the distributions
p(Z
n
X
n
|Z
n−1
) and p(C
n
|Z
n
) are known and
stationary (independent of n). We introduce
distributions P, Q, which are the drivers of the
demand process, as follows
1
:
p(X
n
Z
n
|Z
n−1
) = P(X
n
Z
n
|Z
n−1
)
p(C
n
|Z
n
) = Q(C
n
|Z
n
)
1
P is a joint distribution and we use the same symbol P
to denote the marginals and conditionals.
Multi-devicePower-saving-AnInvestigationinEnergyConsumptionOptimisation
233

• Finally, we assume that job execution time is neg-
ligible. So we do not try to model it, nor the
queueing effect which may result from it on de-
vices. This is a natural assumption for the kind of
device infrastructures we are targetting, where de-
vices are far from full utilisation and spend most
of their time waiting for jobs.
2.2 Formulation as a Sequential
Decision Process
The state of the system at any time is given by a pair
hσ, zi where the control state σ is the subset of indices
of the devices in
ready
mode and z ∈ Z denotes the
demand state of the infrastructure. We seek to build
a controller which takes as input the stream of job re-
quests, maintains the state of the system and uses it to
make decisions at each new job:
• First, the controller must choose the index k of the
device to which the job is assigned. We assume
here that jobs are immediately assigned upon re-
ception.
• Then, just after the assignment, the controller
must choose a family (τ
k
)
k∈σ
of non negative
timeouts, where σ is the control state at that time,
and each τ
k
denotes the sleep schedule for device
k ∈ σ i.e. the time after which device k is to be
switched to
sleep
mode if no job has been re-
ceived in between.
Thus, the problem is formulated as the optimisation of
a sequential decision process. We consider the opti-
misation at infinite horizon with discount factor γ. Let
V
!
hσ, zi and Vhσ, zi be the optimal cost to go associ-
ated with state hσ, zi, respectively before and after an
assignment. The optimality equation is given in Fig-
ure 1.
• Equation (1) concerns the total cost of assigning,
in state hσ, zi, a job with cost menu c to a device k:
it consists of the client assignment cost c
k
speci-
fied in the cost menu, plus, if device k is in
sleep
mode (i.e. k 6∈ σ), the wake up cost to lift it to
ready
mode, plus the cost to go after assignment
from the new state hσ ∪ {k}, zi in which k is now
in
ready
mode. The demand state is unchanged
because we ignore job execution time, so the job
is assumed to be completed immediately after as-
signment.
• Equation (2) concerns the cost of setting time-
outs (τ
k
)
k∈σ
for the devices in
ready
mode in
state hσ, zi, when the next job arrives after time
x in a demand state z
′
: it consists of the cost
g
k
(x, τ
k
) of the energy consumption until time x
of each device k in
ready
mode with timeout τ
k
,
plus the discounted cost to go from the new state
h{k ∈ σ|x < τ
k
}, z
′
i where the control state con-
sists exactly of those devices in σ for which the
timeout was not reached at time x (i.e. τ
k
> x).
If functions V and V
!
satisfy Equations (1) and (2),
then the optimal policy for the controller can be for-
mulated as follows:
• When receiving a job with cost menu c in state
hσ, zi, assign it to the device k which minimises
the minimisation objective of Equation (1).
• Just after assignment in state hσ, zi, set timeouts
(τ
k
)
k∈σ
which minimise the minimisation objec-
tive of Equation (2).
3 SOLVING FOR OPTIMALITY
We are looking for a solution in V
!
,V to the system of
Equations (1) and (2). We follow the general proce-
dure of value iteration, which alternates updates to V
!
from V using Equation (1) and updates to V from V
!
using Equation (2). We assume that the demand state
space Z is finite, so the overall state space is finite and
both V
!
,V can be represented as finite dimension vec-
tors. The update using Equation (1) is quite straight-
forward: minimisation can be done by enumeration
(of the devices), and the integral is turned into a sum,
assuming distribution Q is discrete. The update us-
ing Equation (2) is more involved, as it requires solv-
ing a K-dimensional optimisation. Unfortunately, the
optimisation objective has no good properties, such
as convexity or smoothness, which would make it
amenable to standard optimisation techniques. Fur-
thermore, it is important to reach a global optimum
and not just a local one. The rest of this section is
devoted to solving the optimisation in Equation (2).
3.1 Transformation of the Objective
Although the optimisation in Equation (2) occurs in
the (up to) K-dimensional space of possible timeouts,
it can in fact be turned into a sequence of (up to)
K uni-dimensional optimisations. To show this, we
introduce two side functions V
◦
ht, σ, zi and vht, σ, zi
where t is a positive scalar, and σ, z is a state. It can
then be shown that the solution in V to Equation (2)
can be obtained by solving the system of equations in
V
◦
, v,V shown in Figure 2. In that system, all the op-
timisations in the space of timeouts are captured by a
single operator ↓, defined for any function f on posi-
tive scalars by
↓ f(τ) = min
t≥τ
f(t)
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
234

V
!
hσ, zi =
Z
c
min
k
[c
k
+ I[k 6∈ σ]
ˆ
b
k
+Vhσ∪{k}, zi]dQ(c|z) (1)
Vhσ, zi = min
(τ
k
)
k∈σ
Z
xz
′
[
∑
k∈σ
g
k
(x, τ
k
) + γV
!
h{k ∈ σ|x < τ
k
}, z
′
i]dP(xz
′
|z) (2)
Figure 1: The optimality equations for the system.
V
◦
ht, σ, zi =
Z
xz
′
(−g
σ
(x,t) + γI[t ≤ x]V
!
hσ, z
′
i)dP(xz
′
|z) (3)
vh.,
/
0, zi = V
◦
h.,
/
0, zi (4)
vh.,
6=
/
0
σ
, zi = ↓((min
k∈σ
vh., σ\{k}, zi) −V
◦
h., σ, zi) +V
◦
h., σ, zi (5)
Vhσ, zi = vh0, σ, zi +
Z
x
g
σ
(x, 0)dP(x|z) (6)
Figure 2: Solving Equation (2) by a sequence of unidimensional optimisations.
In words, this operator returns the greatest monotonic
(non decreasing) lower bound of f . It is the only op-
erator in Figure 2 which involves a non discrete opti-
misation. In more details, we have
• Equation (3) computes a function V
◦
from V
!
. We
use the notation g
σ
as a short hand for
∑
k∈σ
g
k
.
• Then Equations (4) and (5) inductively compute
a function v from V
◦
. Eq. (4) yields the values
of v at σ =
/
0, while Eq. (5) yields the values of
v at σ 6=
/
0 based on its values at σ \ {k} for each
k ∈ σ. Hence, function v can be entirely computed
in K iterations of updates using initially Eq. (4)
and then repeatedly Eq. (5).
• Finally, Equation (6) yieldsV by taking the values
of v at t = 0.
The main problem with this transformation is that,
while V,V
!
can be represented as the finite dimen-
sion vectors of their values, since they have a finite
domain, that is not the case of V
◦
and v as these func-
tions have an argument which lives in a continuous
space. The traditional solution to this problem is to
approximate such functions by linear combinations of
suitably chosen basis functions. We take a different
approach here, which does not rely on approximation.
3.2 Solution Space
Given a demand state z, let F
o
be the finite set consist-
ing of the initial functions V
◦
h., σ, zi for all possible
control state σ. What we are looking for is a function
space F with the following properties:
• Finite Representability: functions in F can be
represented by some finite parametric structures;
• Pointwise Computability: for any scalar x and
function f in F given by its parametric represen-
tation, the scalar f(x) can be computed;
• Stability by the operators of Figure 2:
(A )
∀ f ∈ F
o
f ∈ F
∀ f, g ∈ F min( f, g) ∈ F
∀ f ∈ F , g ∈ F
o
↓( f − g) + g ∈ F
A function space satisying all these requirements is
called a solution space, since it can be used to update
exactlyV fromV
!
using the updates given in Figure 2.
Now, the main formal result of our study is the follow-
ing proposition.
Proposition 1. If F
o
satisfies some minimal condi-
tions, then a solution space can be constructed.
The conditions on F
o
for Proposition 1 to hold are
the following, where ∆F
o
denotes the set of functions
of the form f − g with f, g ∈ F
o
.
• There is a procedure EVAL which, given a scalar
t and a function f in F
o
, returns the scalar f(t).
This includes t = +∞, in which case the returned
value is the limit (assumed finite) of f(t) when t
tends to infinity. In other words, the initial func-
tions must at least be pointwise computable.
• There is a procedure BEHAVIOUR which, given a
function h in ∆F
o
, returns the table of variations
of h, i.e. a finite interval partition (A
i
)
i∈I
of R
+
,
and for each i ∈ I, an indicator s
i
∈ {−1, 1} with
s
i
positive (resp. negative) meaning that h is non
decreasing (resp. non increasing) on interval A
i
.
When these conditions hold, the solution space
promised by Proposition 1 is the function space F
∗
defined as follows: F
∗
is the space of functions
Multi-devicePower-saving-AnInvestigationinEnergyConsumptionOptimisation
235
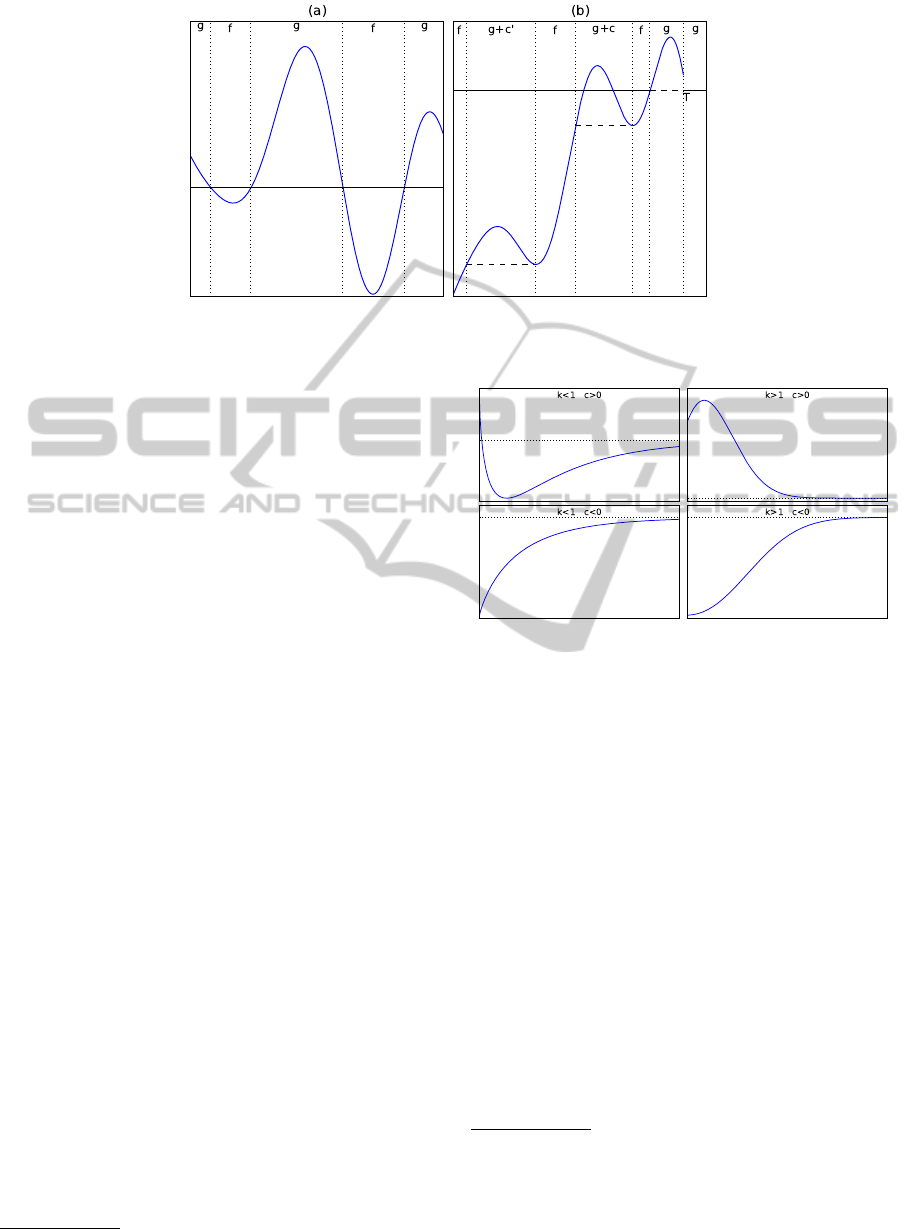
Figure 3: Computing (a): min( f, g) and (b): ↓( f −g)+g given f − g (blue curve); the result (indicated at the top) is piecewise
identical to either f or g plus a scalar.
which are piecewise F
o
-plus-constant, i.e. of the
form
∑
i∈I
1
A
i
( f
i
+ r
i
1) where (A
i
)
i∈I
is a finite inter-
val partition of R
+
, ( f
i
)
i∈I
is a family of functions in
F
o
, and (r
i
)
i∈I
is a family of scalars, called the offsets.
1
A
where A is any interval of R
+
is the characteristic
function of A, which returns 1 for the scalars in A and
0 elsewhere. 1 is the constant function which always
return 1. Let’s sketch the proof that F
∗
is a solution
space:
• F
∗
is finitely representable. Indeed, a function
in F
∗
is entirely described by the bounds of its
underlying (finite) interval partition, and for each
interval, the corresponding element in F
o
(which
is finite) and corresponding offset.
• F
∗
is pointwise computable. Given a function f
in F
∗
and a scalar x, the value f(x) is computed
by first determining the interval of the underlying
partition of f to which x belongs (this consists in
a sequence of comparisons with the bounds of the
intervals) and then using procedure EVAL with the
function in F
o
corresponding to that interval, and
adding its offset.
• Finally F
∗
satisfies the stability conditions (A ).
The first condition is obvious. The intuition for
the proof of the other two conditions can be read
on Figure 3. Essentially, if f, g are any functions,
and f − g, represented by the blue curve on the
figure, is reasonably well-behaved, then min( f, g)
and ↓( f − g) + g are piecewise equal to either f
or g + r1 where r is a scalar. If the table of vari-
ations of f − g is known, as provided by proce-
dure BEHAVIOUR, then the exact bounds at which
min( f, g) and ↓( f − g) + g alternate between the
two cases can be computed precisely (as well as
the values of r), by simple bi-section
2
on each in-
2
We mention here bisection, because it is the simplest
Figure 4: Different shapes of the functions ψ + cψ
′
in the
case of Weibull demand with shape parameter κ.
terval of monotonicity of f − g using procedure
EVAL. Technically, what is needed in the proof is
the property above for ↓(1
[0,T)
( f − g)) + g for T
scalar or infinite, as shown in the figure.
3.3 An Example
Consider the case where the demand state space is fi-
nite, and, for a given demand state z, distribution P
given z is the independent product of a Weibull distri-
bution
3
and a multinomial:
dP(xz
′
|z) = π
z
′
κx
κ−1
exp(−x
κ
)dx
where
∑
z
′ π
z
′
= 1. It is easy to show that, up to some
scaling factors, the functions in F
o
(and hence those
in ∆F
o
) are of the form ψ(.;z) + cψ
′
(.;z), where
way to obtain a root of a uni-dimensional function using
only a zero-order oracle like procedure EVAL. If higher or-
der oracles are available, then of course more refined meth-
ods can be used instead.
3
Observe that the scale parameter of the Weibull is taken
to be 1, thus fixing the time unit.
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
236

ψ(t;z) =
1
κ
γ(
1
κ
,t
κ
)
ψ
′
(t;z) = exp(−t
κ
)
For a given c, function ψ(.;z) + cψ
′
(.;z) can assume
the different shapes, depending on κ and c, shown in
Figure 4 and has the following characteristics (when
κ 6= 1):
• It is continuous, has value c at 0, and has a limit at
infinity given by
1
κ
Γ(
1
κ
) where Γ is the complete
Gamma function.
• It is monotonically increasing if c ≤ 0, otherwise
it has a single local optimum, at t
∗
= (
1
cκ
)
1
κ−1
,
which is a maximum if κ > 1 and a minimum if
κ < 1.
• It is concave if c ≤ 0 and κ < 1, otherwise it has a
single inflection point solution of the simple poly-
nomial equation 1−
1
κ
+
1
cκ
t − t
κ
= 0.
All this information is sufficient to implement proce-
dures BEHAVIOUR, EVAL, and even higher order ora-
cles than EVAL.
3.4 Experimental Validation
The conditions required for Proposition 1 to hold
essentially depend on distribution P in the demand
model. They actually hold for a wide range of dis-
tributions, and we have derived solutions for various
standard distributions (Exponential, Weibull, etc.).
We have also conducted experiments both on simu-
lated and real data, which cannot be reported here for
lack of space. They are available on demand from the
authors. Essentially, in our experiments, we compare
the TRANSFER policy obtained by the algorithm pro-
posed here, which minimises the overall cost of the
infrastructure, to the SELFISH policy, where each job
is assigned the device which minimises only the cost
for the client (as given in the cost menu). Unsurpris-
ingly, the TRANSFER policy always performs better,
and the gain can be arbitrarily high depending on a
characteristic of the demand called the transfer loss
defined as
Q
+
=
def
min
z
Z
c
c
+
dQ(c|z)
where, for any cost menu c, we let c
+
= min
k,c
k
>0
c
k
(it is assumed, without loss of generality, that the
smallest value in a cost menu is always 0, so c
+
is
the second smallest).
4 CONCLUSIONS
In this paper, we have studied the tradeoff between
the client cost of job assignment and the energy con-
sumption of the devices in a framework in which a
controller mediates the interaction between client and
devices. The kind of system we target is different
from the typical jobshop, for which optimisation is
a well studied topic. Instead, we target infrastructures
in which
• devices spend most of their time waiting for jobs,
and the controller can set the energy levelat which
they do that;
• clients set device assignment constraints, and the
controller can override some of them at a price.
The role of the controller is to find a tradeoff between
the price of overiding client constraints and the idle
energy consumption of the devices. We propose a se-
quential decision process model of the system as well
as a method to achieve the optimal solution.
REFERENCES
B¨auerle, N. and Rieder, U. (2011). Markov Decision Pro-
cesses with Applications to Finance. Springer Verlag.
Benini, L., Bogliolo, A., and De Micheli, G. (2000). A
survey of design techniques for system-level dynamic
power management. IEEE Transactions on very large
scale integration systems, 8(3):299–316.
Bertsekas, D. (2005). Dynamic Programming and Optimal
Control. Athena Scientific.
Raghavendra, R., Ranganathan, P., Talwar, V., Wang, Z.,
and Zhu, X. (2008). No “power” struggles: Coordi-
nated multi-level power management for the data cen-
ter. Operating systems review, 42(2):48–59.
Sinha, A. and Chandrakasan, A. (2001). Dynamic power
management in wireless sensor networks. IEEE De-
sign & Test of Computers, 18(2):62–74.
Urgaonkar, R., Kozat, U., Igarashi, K., and Neely, M.
(2010). Dynamic resource allocation and power
management in virtualized data centers. In Proc.
of IEEE/IFIP Network Operations and Management
Symposium, pages 479–486, Osaka, Japan.
Wang, Y., Xie, Q., Ammari, A., and Pedram, M. (2011). De-
riving a near-optimal power management policy using
model-free reinforcement learning and bayesian clas-
sification. In Proc. of 48th Design Automation Con-
ference, pages 41–46, San Diego, CA, U.S.A.
Multi-devicePower-saving-AnInvestigationinEnergyConsumptionOptimisation
237
