
Knowledge Engineering and Ontologies for Object Manipulation in
Collaborative Virtual Reality
Manolya Kavakli
Visor (Virtual and Interactive Simulation of Reality) Research Group, Virtual Reality Lab,
Department of Computing, Macquarie University, North Ryde, Sydney, Australia
Keywords: Collaborative Engineering, Virtual Reality, Object Manipulation.
Abstract: This project describes an ontology for a collaborative engineering task. The task is to take apart an
interactive 3D model in 3D space using virtual reality and to manipulate an object. The project examines a
virtual environment in which two engineers can perform a number of tasks for manipulating object parts
controlling a wiimote inside an immersive projection system. The interface recognizes hand-gestures of the
engineers, pass commands to a VR modelling package via a gesture recognition system, perform the actions
on the 3D model of the object, generating it on the immersive projection screen. We use retrospective
protocol analysis for knowledge engineering and ontology building analysing the cognitive processes.
1 INTRODUCTION
“A major problem in the design and application of
intelligent systems is to capture and understand: the
data and information model that describes the
domain; the various levels of knowledge associated
with problem solving; and the patterns of
interaction, information and data flow in the
problem solving space. Domain ontologies facilitate
sharing and re-use of data and knowledge between
distributed collaborating systems.” (Ugwu et al,
2001). We need ontologies for the following
reasons:
To have shared understanding of the topic
To enable reuse of domain knowledge
To make domain assumptions explicit
To analyze domain knowledge
Ontologies have become core components of many
large applications yet the development of
applications has not kept pace with the growing
interest (Noy and McGuinness, 2001). This paper
describes an ontology for collaborative engineering
platforms using virtual reality and knowledge
acquisition techniques. The paper shows that a
common ontology facilitates interaction and
negotiation between engineers (agents) and other
distributed systems. The paper discusses the findings
from the knowledge acquisition, their implications in
the design and implementation of collaborative
virtual reality systems, and gives recommendations
on developing systems for collaborative design and
object manipulation in engineering sector.
2 OBJECT MANIPULATION IN
VIRTUAL REALITY
The first effort on object manipulation can be traced
back to late 70’s. Parent (1977) proposed a system
which was capable of sculpting 3D-data. The
significant problem solved within the system was
hidden-line elimination by choosing planar
polyhedral representation. Parry (1986) developed a
system using constructive solid geometry (CSG) that
can only carry out a number of simple sculpting
tasks using traditional devices such as mice and
keyboards as input medium. Coquillart (1990)
developed a sculpting system using 3D free-form
deformation which was more capable of generating
arbitrarily shaped objects in comparison to Parry’s
system. Mizuno et al (1999) built a system for
virtual woodblock printing by carving a workpiece
in the virtual world using CSG. Recent
developments in VR led to a number of important
innovations. Pederson (2000) proposed Magic
Touch as a natural user interface that consists of an
office environment containing tagged artifacts and
284
Kavakli M..
Knowledge Engineering and Ontologies for Object Manipulation in Collaborative Virtual Reality.
DOI: 10.5220/0004170202840289
In Proceedings of the International Conference on Knowledge Engineering and Ontology Development (KEOD-2012), pages 284-289
ISBN: 978-989-8565-30-3
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)
wearable wireless tag readers placed on the user’s
hands. Bowman and Bilinghurst (2002) attempted to
develop a 3D sketchpad for architects. However, the
3D interface with menus did not respond to the
expectations of architects, and there was a need for a
greater understanding of users’ perceptions and
abilities in 3D interface development. Salomon
(2005) introduced non-uniform rational b-spline
(NURB) deformation to Lau’s Vsculpt system
(2003) with the integration of CyberGloves. In this
system, the users could generate arbitrary-shaped
objects by manipulating a number of control points
that required the users to learn the parametric control
techniques. Jagnow and Dorsey (2006) applied
haptic displacement maps to process the graphics
data in an efficient manner in a virtual sculpting
system. In this system, models could be described by
a series of partitioned local slabs, each representing
a vector field. However, haptic displacement map
could not be applied to the dynamic scenes that
change frequently. In spite of these innovations,
there are still a number of core questions waiting to
be answered. These are as follows:
How can we develop a robust method for object
manipulation, configuring complex engineering and
design systems by using VR technology?
How can we support the communication between
geographically separated engineers and the
CAD/CAM model of the product?
2.1 Collaborative Engineering in VR
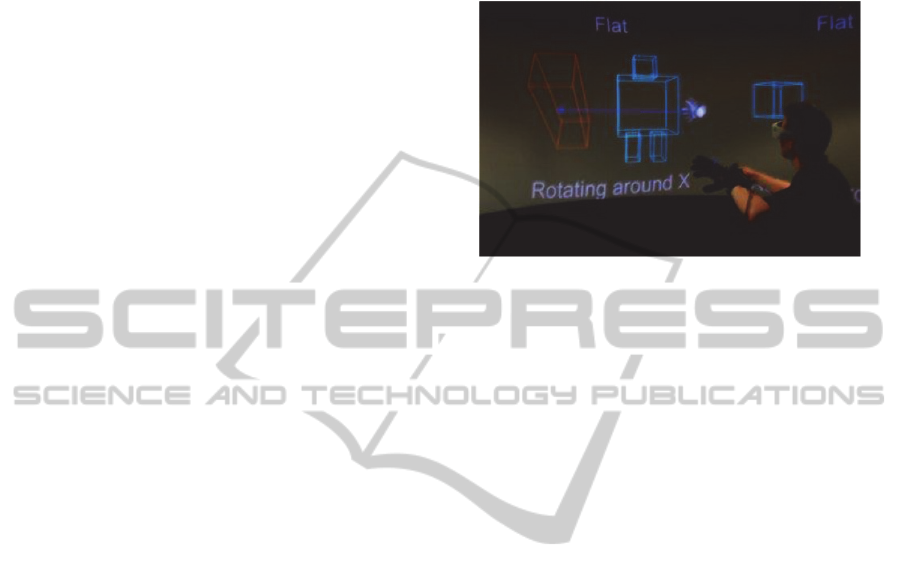
In this project, we have developed a collaborative
engineering platform to investigate the nature of
shared information. The project examines a virtual
environment in which two engineers can perform a
number of tasks for manipulating object parts
controlling a wiimote inside an immersive projection
system (Figure 2). The engineers wearing
stereoscopic goggles have the benefit of being able
to work with a stereo image. The interface
recognizes hand-gestures of the engineers, pass
commands to a VR modelling package via a gesture
recognition system, perform the actions on the 3D
model of the object, generating it on the immersive
projection screen. Wiimote (Wii Remote) is the
primary controller for Nintendo's Wii console. The
main feature of the Wii Remote is its motion sensing
capability, which allows the user to interact with and
manipulate items on screen via movement and
pointing through the use of accelerometer and
optical sensor technology.
The expected outcomes of this study are:
Novel human computer interaction techniques;
and
Ontologies demonstrating the structure of
cognitive actions of engineers in object
manipulation.
Figure 1: Collaboration in Co-DeSIGN.
2.2 Requirements Analysis
The objective of this project is to design and build a
collaborative platform (Co-DeSIGN) for
disassembling a mechanical product using Virtual
Reality technology. Each task the mechanical
engineers to perform using this collaborative
platform refers to a module in the system
architecture. The main tasks and modules are
specified as follows:
2.2.1 Explore and Navigate
This module manages the exploration and navigation
in the virtual world. The user is expected to explore
a 3D object and move around it. The user must
control a cursor to perform different actions to
complete the task. The actions are as follows:
Visualisation: The user must see, perceive, and
investigate the product. We must create a point of
view to represent the sight of the engineer.
Navigation: While the user is able to move
around the product, he must be able to zoom in/out,
rotate, and translate his point of view.
Interaction: The user must be able to control the
cursor using wiimote. The user must have a control
over the depth of the cursor, getting closer or far
from the product. The icon of the cursor must reflect
the changes depending on the action performed by
the user.
2.2.2 Disassemble
This module manages the disassembling process.
We have categorised all of the actions the user needs
to perform in order to disassemble the given
KnowledgeEngineeringandOntologiesforObjectManipulationinCollaborativeVirtualReality
285

mechanical product. It is obvious that in reality the
number of possibilities and tools a technician can
use is quasi infinite. In our application, we need
metaphors to realize a subgroup of these actions and
possibilities. In future, we may be able to simulate
more actions by adding new modules to this
application. We hope to be able to integrate a variety
of mechanical links between various parts of the
product. The actions relevant to this module are
specified as follows:
Movement: The user must be able to move
various parts of the product.
Selection: The user needs to select various parts.
Integration or Disintegration: The user must be
able to perform specific actions to the selected parts,
such as mounting parts with a screwdriver or to take
apart.
Collision detection: The application must
manage the collision between various parts.
Logical decision-making: The application must
manage the disassembling scenario with a logic
engine. For example, the user is not allowed to
perform any tasks at anytime in the scenario (he may
need to remove the base first, to disassemble the
parts above).
Position handling: Finally, the application needs
to manage various states of the parts and know their
positions as well as where they belong to as the part
of the product.
2.2.3 Collaborate
This module manages the collaboration of the users
with each other. The engineers must be able to
collaborate to perform the tasks together. This
involves not only the communication with each
other, but also following the partner’s task
performance. Some tasks may require the
performance of a specific action at the same time to
complete it. The number of different tasks the team
must perform together depends on the chosen
scenario. We have limited the number of users of
this collaborative platform with two. Therefore there
is no use in building a complex network to manage
the collaboration in our case. A simple network
where an engineer can communicate with another
without a central server is sufficient.
We defined the actions for the collaborative
process must as follows:
Processing the State of Actions: The application
must keep a record of actions of both users, perform
these actions subsequently on the product, and
inform the users about what the other is doing or has
done in a timely manner.
Speech Processing: The application must allow
both users to speak with each other.
Task Processing: Specific tasks must be
completed only if both users have performed the
right actions at the right time.
3 EXPERIMENTATION
System set up includes two immersive projection
systems and two wiimotes. The 3D model is
generated in Catia 3D modelling software, and
transferred to Vizard virtual environment. Following
this, we conduct pilot studies to test the system.
In this application the goal to be reached by the
team is not to disassemble a new product, but to
disassemble a well-known product the fastest and
the most efficient way possible. The process that
leads to task completion depends on the product the
team must disassemble. There are instructions to
follow and there is often a unique way to
disintegrate a product. Users must follow a specific
order. The assembly given to the user is composed
of a base with two slide rails and a moving base
beard by two bearings as shown in Figure 2. We
conducted pilot experiments and have had 2
engineers to test the system. They have used the
interface (Co-DeSIGN) to disassemble a product in
VR collaborating at a distance.
In future, we plan to use 20 mechanical
engineers to test the system in ENSAM, France and
at the VR LAB, Australia. All participants will be
videotaped, while performing the task in a design
session of 15 minutes in duration. Having completed
the task, the model disassembled by the engineers is
displayed and participants are viewed to video
records of their own engineering session. Then, we
ask them to interpret the reasoning of their hand
gestures, speeches, and motor actions. We also give
them a questionnaire to assess the quality of the
system they have used in comparison to the
traditional methods.
Thus we collect the Retrospective engineering
protocols. We plan to use matrix analytic methods to
give a probability distribution of paths of
consecutive actions in cognitive processes. To
specify usability requirements in system
development, it is important to understand how
humans perceive the world, how they store and
process information, how they solve problems, and
how they physically manipulate objects. We use the
Task Analysis method (the study of the way people
perform tasks with existing systems) to model the
KEOD2012-InternationalConferenceonKnowledgeEngineeringandOntologyDevelopment
286

system. This involves not only a hierarchy of tasks
and subtasks, but also a plan that consists of the
order and conditions to perform subtasks.
Knowledge-based task analysis includes building
taxonomies of objects and actions involved.
Figure 2: The assembly used in the experiments.
4 METHODOLOGY
The methodology is based on the simulation of
cognitive processes in object visualisation, drawing,
and manipulation. Kavakli et al. 1998 conducted a
series of experiments on artists’ free hand sketching
and found that objects are drawn 90% part by part.
Later, they explored the nature of the design process
(Kavakli et al., 1999) and found that there was
evidence for the coexistence of certain groups of
cognitive actions in sketching (Kavakli and Gero,
2001a), which resembles mental imagery processing.
Investigating the concurrent cognitive actions in
designers, they found that the expert's cognitive
actions are well organized and clearly structured,
while the novice's cognitive performance has been
divided into many groups of concurrent actions
(Kavakli and Gero, 2001b, 2002, 2003). This
structural organisation can be exploited to model an
intelligent system to be used for object
manipulation, especially in teams involving novice
and expert engineers. VR technology in this paper
refers to the interface that enables the user to interact
with a VE. It includes computer hardware in the
form of peripherals such as visual display and
interaction devices used to create and maintain a 3D
VE. A VR interface provides immersion, navigation,
and interaction. The project defined in this proposal
examines a VE in which an engineer can manipulate
the parts of a 3D object using a pointer, motion
trackers, and stereoscopic goggles. As stated by
Kjeldsen (1997), hand gestures occur in space, rather
than on a surface, consequently positioning is
inherently 3D. This can obviously be an advantage
when developing gesture-based object manipulation
systems. The usability of 3D interaction techniques
depend upon both the interface software and the
physical devices used. However, little research has
addressed the issue of mapping 3D input devices to
interaction techniques and applications.
Our approach is to investigate 3D object
manipulation in collaborative engineering, hand
gestures and design protocols as the language of the
engineering process. We focus on the structures in
visual cognition and explore bases for rudimentary
cognitive processes to integrate them into an
intelligent VR system. The results provided by
protocol analysis studies are used to construct a user
interface for both visual cognition and hand-gesture
recognition. Retrospective protocol analysis is
influential in understanding visual cognition in the
engineering process.
4.1 Retrospective Protocol Analysis
Retrospective Protocol Analysis involves following
stages:
Identifying the part–based structure of the
object: The completed model is decomposed into
parts to be used as a reference for the coding of
related cognitive actions.
Interpretation of video protocols: We transcribe
the verbal protocols of designers from video records
for the analysis of engineering protocols.
Segmentation of design protocols: Transcribed
engineering protocols are divided into segments. A
cognitive segment consists of cognitive actions that
appear to occur simultaneously.
Coding: We code cognitive actions of designers
using a coding scheme developed by Suwa et al
(1998). In the coding scheme, the contents of what
engineers see, attend to, and think of are classified
into four information categories, namely: depicted
elements, their perceptual features and spatial
relations, functional thoughts, and knowledge. There
are four modes of cognitive actions (Kavakli et al.,
1999): physical (drawing actions, moves, looking
actions), perceptual, functional, and conceptual
(goals). Each mode has a number of subgroups.
In the sample (Figure3), the goals of bisecting the
building and splitting the space, triggers a number of
perceptual actions driven by drawing a circle (Dc:
create a new depiction). Perceptual actions about
Attention to relations between the object features
(Prn1 and Prn2: create or attend to a new relation)
KnowledgeEngineeringandOntologiesforObjectManipulationinCollaborativeVirtualReality
287
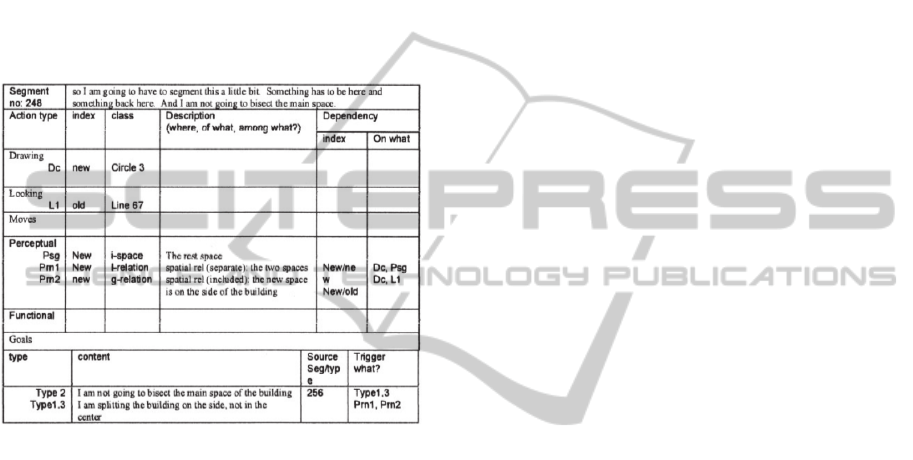
are dependent on Drawing a circle (Dc) and Looking
at (L1) previously drawn depictions (line 67). One of
these perceptual actions (Prn1) triggers the
Discovery of a space (Psg: discover a space as a
ground). We will particularly focus on correlations
between the cognitive actions coded "Dc, L, Prp,
Prn, Fo, Fn" as the path to discoveries, based on
Kavakli and Gero (2002). Our task is to mainly
focus on motion tracking, as well as the relationship
between the physical (especially moves) and
perceptual actions. We improve the category of
physical actions (moves) in the existing coding
scheme.
Figure 3: Coded cognitive segment.
4.2 Ontology Development
The Artificial-Intelligence literature contains many
definitions of an ontology; many of these contradict
one another. In this paper, similar to Noy and
McGuinness (2001), we consider an ontology as a
formal explicit description of concepts in a domain
of discourse (classes (sometimes called concepts)),
properties of each concept describing various
features and attributes of the concept (slots
(sometimes called roles or properties)), and
restrictions on slots (facets (sometimes called role
restrictions)). An ontology together with a set of
individual instances of classes constitutes a
knowledge base. In reality, there is a fine line where
the ontology ends and the knowledge base begins.
In this project, our aim is to lay fundamentals for an
ontology development for gesture recognition
systems to be used by an intelligent user interface.
Currently, we are working on the development of an
ontology for gestures. We need to account for a
wide-range of physical actions (hand gestures) as
described by Mulder (1996):
Goal directed manipulation: Changing position
(lift, move, heave, raise, etc.), Changing orientation
(turn, spin, rotate, revolve, twist), Changing shape
(mold, squeeze, pinch, etc.), Contact with the object
(grasp, seize, grab, etc.), Joining objects (tie, pinion,
nail, etc.).
Indirect manipulation: (Whet, set, strop)
Empty-handed gestures: (twiddle, wave, snap,
point, hand over, give, take, urge, etc.)
Haptic exploration: (touch, stroke, strum, thrum,
twang, knock, throb, tickle, etc.)
In the design of a hand-gesture based interface, we
plan to address the following issues (Kjeldsen,1997):
object selection, action selection (pose and position,
pose and motion, multiple pose), action modifiers
and rhythm of interaction (syntax of hand gestures).
We will explore the semantics of pause (action stops
then continues), comma (action completed and
repeated) and retraction (another action). Assuming
that hand gestures generally have a Prepare-Stroke-
Retract cycle, we develop a vocabulary of hand
gestures such as:
Prepare/Pose/Pause/Select/Retract,
Prepare/Pose/Comma/Pose/Stroke/Retract.
The following syntax may be used to address a
hand-gesture interface and phrase can be further
decomposed to implement the issues described
above:
Gesture-> Prepare <Stroke> Retract
Stroke -> [Phrase Comma]* Phrase
Phrase -> [Pose|Motion Pause]* Pose|Motion
In this paper, we discuss general issues to consider
and offer one possible process for developing an
ontology. We describe an iterative approach to
ontology development: we start with a rough first
pass at the ontology, and then revise and refine the
evolving ontology and fill in the details.
5 CONCLUSIONS
In this project, we build a hybrid reality system,
where the user’s hands form dynamic input devices
that can interact with the virtual 3D models of
objects in a Virtual Environment (VE). In the current
phase, we have been trying to complete the gesture
ontologies to feed the gesture recognition system
and then we will start the experimentation with a
large number of participants. As stated by McNeill
(2006), gestures can be conceptualized as objects of
cognitive inhabitance and as agents of social
KEOD2012-InternationalConferenceonKnowledgeEngineeringandOntologyDevelopment
288

interaction. Inhabitance seems utterly beyond
current modelling, but an agent of interaction may
be modelable. Coordinative structures in
collaborative engineering may help explain the
essential duality of language which is at present
impossible to model by a computational system.
ACKNOWLEDGEMENTS
This project has been sponsored by the Australian
Research Council Discovery grant DP0988088 to
Kavakli, titled “A Gesture-Based Interface for
Designing in Virtual Reality”, and by two French
government scholarships given to Stephane Piang-
Song (2008) and Joris Boulloud (2009) to complete
their internships towards the degree of MEng at the
Department of Computing, Macquarie University.
REFERENCES
Bowman, D. and Billinghurst, M. 2002. Special Issue on
3D Interaction in Virtual and Mixed Realities: Guest
Editors' Introduction. Virtual Reality, vol. 6, no.3, pp.
105-106.
Coquillart, S., 1990. Extended Free-Form Deformation: A
sculpturing tool for 3D geometric modeling. In
SIGGRAPH ’90, vol 24, number 4, pages 187-196,
ACM, August.
Jagnow, R., Dorsey, J., 2006: Virtual Sculpting with
Haptic Displacement Maps. robjagnow.com/research/
HapticSculpting.pdf, last accessed: 10th Jun 2006.
Kavakli, M., Scrivener, S.A.R, Ball, L.J., 1998. The
Structure of Sketching Behaviour, Design Studies, 19,
485-517.
Kavakli, M., Suwa, M., Gero, J. S., Purcell, T., 1999.
Sketching interpretation in novice and expert
designers, in Gero, J.S., and Tversky, B. (eds), Visual
and Spatial Reasoning in Design, University of
Sydney, Sydney, 209-219.
Kavakli, M., Gero, J. S., 2001a. Sketching as mental
imagery processing, Design Studies, Vol 22/4, 347-
364.
Kavakli, M., Gero, J. S., 2001b. Strategic Knowledge
Differences between an Expert and a Novice, Preprints
of the 3rd Int. Workshop on Strategic Knowledge and
Concept Formation, University of Sydney, 44-68.
Kavakli, M., Gero, J. S., 2002. Structure of Concurrent
Cognitive actions: A Case Study on Novice & Expert
Designers, Design Studies, Vol 23/1, 25-40.
Kavakli, M., Gero, J. S., 2003. Difference between expert
and novice designers: an experimental study, in U
Lindemann et al (eds), Human Behaviour in Design,
Springer, pp 42-51.
Kjeldsen, F. C. M.,1997. Visual Interpretation of Hand
Gestures as a Practical Interface Modality, PhD
Thesis, Grad. Sch. of Arts and Sci., Columbia Uni.
Lau,R., Li, F., and Ng, F., 2003. "VSculpt: A Distributed
Virtual Sculpting Environment for Collaborative
Design," IEEE Trans. on Multimedia, 5(4):570-580
McNeill, D., 2006. Gesture and Thought, The Summer
Institute on Verbal and Non-verbal Communication
and the Biometrical Principle, Sept. 2-12, 2006, Vietri
sul Mare (Italy), organized by Anna Esposito,
http://mcneilllab.uchicago.edu/pdfs/dmcn_vietri_sul_
mare.pdf (last accessed on 19.8.2012).
Mizuno, S., Okada, M., Toriwaki, J., 1999. Virtual
sculpting and virtual woodblock printing as a tool for
enjoying creation of 3d shapes. FORMA, volume 15,
number 3, pages 184-193, 409, September.
Mulder, A., 1996. Hand Gestures for HCI, Hand Centered
Studies of Human Movement Project, Technical
Report 96-1, School of Kinesiology, Simon Fraser
University, February.
Noy, N. F. and McGuinness, D. L. 2001. Ontology
Development 101: A Guide to Creating Your First
Ontology. Stanford Knowledge Systems Laboratory
Technical Report KSL-01-05 and Stanford Medical
Informatics Technical Report SMI-2001-0880, March.
Parry, S. R., 1986. Free-form deformations in a
constructive solid geometry modeling system. PhD
thesis. Brigham Young University.
Parent, R. E., 1977, A system for sculpting 3-D data. In
SIGGRAPH’77, volume 11, pages 138-147. ACM,
July.
Pederson, T., 2000. Human Hands as a link between
physical and virtual, Conf. on Designing Augmented
Reality Systems (DARE2000), Helsinore, Denmark,
12-14 April.
Salomon, D., 2005. Curves and Surfaces for Computer
Graphics. Springer Verlag August 2005. ISBN 0-387-
24196-5. LCCN T385.S2434 2005. xvi+461 pages.
Scrivener, S. A. R., Harris, D., Clark, S. M., Rockoff, T.,
Smyth, M., 1993. Designing at a Distance via Real-
time Designer-to-Designer Interaction, Design Studies,
14(3), 261-282.
Suwa, M., Gero, J. S., and Purcell, T.: 1998. Macroscopic
analysis of design processes based on a scheme for
coding designers' cognitive actions, Design Studies
19(4), 455-483.
Ugwu, O. O., Anumba, C. J., Thorpe, A., 2001. Ontology
development for agent-based collaborative design,
Engineering, Construction and Architectural
Management, Vol. 8 Iss: 3, pp.211 – 224.
KnowledgeEngineeringandOntologiesforObjectManipulationinCollaborativeVirtualReality
289
