
Simulation of Real-time Multiprocessor Scheduling with Overheads
Maxime Ch´eramy
1,2
, Anne-Marie D´eplanche
3
and Pierre-Emmanuel Hladik
1,2
1
CNRS, LAAS, 7 avenue du Colonel Roche, F-31400 Toulouse, France
2
Univ de Toulouse, INSA, LAAS, F-31400 Toulouse, France
3
LUNAM Universit´e - Universit´e de Nantes,
IRCCyN UMR CNRS 6597 (Institut de Recherche en Communications et Cybern´etique de Nantes), ECN,
1 rue de la Noe, BP92101, F-44321 Nantes cedex 3, France
Keywords:
Real-time, Scheduling, Simulation, Multiprocessor, Overheads, Cache.
Abstract:
Numerous scheduling algorithms were and still are designed in order to handle multiprocessor architectures,
raising new issues due to the complexity of such architectures. Moreover, evaluating them is difficult without
a real and complex implementation. Thus, this paper presents a tool that intends to facilitate the study of
schedulers by providing an easy way of prototyping. Compared to the other scheduling simulators, this tool
takes into account the impact of the caches through statistical models and includes direct overheads such as
context switches and scheduling decisions.
1 INTRODUCTION
The study of real-time scheduling had regained inter-
est this last decade with the continuous introduction
of multiprocessor architectures. Multiple approaches
have been used to handle those architectures (Davis
and Burns, 2011). A first approach, called partition-
ing, consists of splitting the task set into subsets. Each
of these subsets is allocated to a unique processor on
which a mono-processor scheduler is then run. In
contrast, a second approach, called global schedul-
ing, allows tasks to migrate from processor to proces-
sor. In that case, there is a single queue of ready tasks
and a single scheduler for all the processors. Finally,
as a compromise that aims to alleviate limitations of
partitioned (limited achievable processor utilization)
and global (non-negligibleoverheads) algorithms, hy-
brid policies such as semi-partitioned and clustered
scheduling have been proposed more recently (Bas-
toni et al., 2011).
By far the greatest focus on multiprocessor real-
time scheduling has been put on algorithmic and theo-
retical issues. Indeed, for the various scheduling poli-
cies, a lot of attention has been paid to define analyti-
cal schedulability tests. However,those results rely on
general and simple models of the considered software
and hardware architectures quite far away from the
practical ones. Such research must now address im-
plementation concerns as well. Actually, multiproces-
sor architectures bring more complexity with shared
caches and memory, new communication buses, inter-
processor interrupts, etc. They also raise new imple-
mentation issues at the operating system level: which
core should run the scheduler?, what data should be
locked?, etc.
Thus, new scheduling policies that try to take ben-
efits from the specificities of the hardware architec-
ture (such as the caches) must be designed and tools
for studying them must be made available. One way
for this is to use a cycle-accurate simulator or even
a real multiprocessor platform, and to execute real
tasks. In that case, the results are very accurate, how-
ever it requires developing the scheduler in a low-
level language and integrating it into an operatingsys-
tem. This work can potentially take a lot of time. Fur-
thermore, the generation of various and realistic tasks
for a massive evaluation is laborious.
In consequence, it is preferable to use an
“intermediate-grained” simulator able to simulate
with a certain level of accuracy the behavior of those
(hardware and software) elements that act upon the
performances of the system. Such a simulator allows
fast prototypingand does not require a real implemen-
tation of the tasks nor the operating system. More-
over, extensive experiments can be easily conducted
and various metrics are available for analysis. Its in-
trinsic drawback is that it will never reflect exactly
how a scheduler behaves in details on a real system
5
Chéramy M., Déplanche A. and Hladik P..
Simulation of Real-time Multiprocessor Scheduling with Overheads.
DOI: 10.5220/0004455200050014
In Proceedings of the 3rd International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH-2013),
pages 5-14
ISBN: 978-989-8565-69-3
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

but it should be enough to give good insights on gen-
eral tendencies.
Our contribution is a simulation tool, called
SimSo (“SImulation of Multiprocessor Scheduling
with Overheads”), that is designed to be easy to use
and able to take into account the specificities of the
system, starting with LRU caches, context-save/load
overheads and scheduling overhead. SimSo
1
is an
open source tool, actively developed, designed to fa-
cilitate the study of the behavior of schedulers for a
class of task systems and a given hardware architec-
ture. For that, we propose to extend the Liu and Lay-
land model (Liu and Layland, 1973) to bring enough
information to characterize how the tasks access the
memory. This allows us to use statistical models to
calculate the cache miss rates and to deduce job exe-
cution times. Moreover, our simulator has been con-
ceived as flexible as possible to be able to integrate
other task and architecture models.
This paper is organized as follows. First, we ex-
plain our motivation in section 2. The main principles
of real-time scheduling are explained in section 3.
Then we explain how the simulator has been imple-
mented in section 4. Section 5 presents the scheduler
component and section 6 deals with the integration of
the hardware models. We present the simulation soft-
ware in section 7 and we compare it to the existing
similar tools in section 8. To conclude, we summa-
rize our contribution and present our future works in
section 9.
2 MOTIVATION
Most of the multiprocessor real-time scheduling
strategies have been designed without taking into ac-
count the presence of caches and their effects on the
system behavior. Though, interferences on the cache
of preempted and preempting tasks allocated to the
same processor may cause additional delays (Mogul
and Borg, 1991). In the same way, when a cache
is shared by multiple processors, the execution of a
task can have a significant impact on another task
running on another processor. Furthermore, schedul-
ing overheads and context switch overheads are often
regarded as negligible. However, on a multiproces-
sor system, schedulers tend to generate more preemp-
tions, more migrations and even more rescheduling
points in order to achieve a high utilization of the pro-
cessors (Devi and Anderson, 2005).
Significant research effort has been focused on
the problem of real-time multiprocessor scheduling
1
Available at http://homepages.laas.fr/mcheramy/simso/.
since the late 1990’s, in particular in the area of
global scheduling. It led to a number of optimal al-
gorithms (PFair and its variants PD and PD
2
, ERFair,
BF, SA, LLREF, LRE-TL, etc.) that are very attrac-
tive because theoretically able to correctly schedule
all feasible task sets without processing capacity un-
used (Davis and Burns, 2011). However their prac-
tical use can be problematic due to the potentially
excessive overheads they cause by frequent schedul-
ing decisions, preemptions and migrations. There-
fore, being able to take them into account helps in the
predictability analysis of such real-time systems for
which the first requirementis to meet time constraints.
Moreover, reducing the overall execution time of the
tasks can also bring significant benefits (for instance,
better response times or less power consumption).
Following these observations, recent research has
emerged and new scheduling algorithms appeared
which aim to reduce the overheads by bounding the
amount of preemptions (Bastoni et al., 2011; Nelis-
sen et al., 2012). Also, a few studies have shown that
avoiding co-schedulingtasks that heavily use a shared
cache can reduce the overall execution time (Fedorova
et al., 2006; Anderson et al., 2006). Finally, other re-
searches focus on cache space isolation techniques to
avoid cache contention on shared caches (Guan et al.,
2009; Berna and Puaut, 2012).
Our primary objective is the comparison of those
numerous scheduling policies and their associated
variants. Currently, the only way to compare them
is by far to try to put in relation the properties exhib-
ited by their authors: computational complexity,num-
ber of scheduling points, utilization bound, number of
task preemptions, number of task migrations. Such a
task is quite intractable since evaluations have been
made under separate conditions. Instead our intention
is to make available a framework allowing to study as
precisely as possible the performance of a scheduler
and to establish relevant comparisons between dif-
ferent scheduling policies based on the same bench-
marks. For instance, given a system correctly schedu-
lable with multiple scheduling policies, we would like
to pick the one that should be the most efficient (less
overhead). For that, we would aim to identify general
trends for classes of tasks and hardware architectures.
A typical result could be: scheduler A is better than
B in most cases, except when the shared cache is too
small given the characteristics of the tasks.
We expect from these results to help the real-
time community to better understandthe cache effects
on scheduling, and bring new ideas that could help
to conceive schedulers which take benefits from the
caches.
SIMULTECH2013-3rdInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
6

3 CONTEXT
In this part, we briefly present the context of real-time
multiprocessor scheduling and its relevant models in
order to facilitate the understanding of the following.
This also precises a few assumptions made for the
simulation.
A real-time application is composed of tasks, i.e.
programs, to be run on a hardware architecture made
of a limited number of processors. Real-time means
that the computing of tasks has to meet time con-
straints (typically release times and deadlines). The
scheduler is a software system component whose pur-
pose is to decide at what time and on which processor
tasks should execute. Therefore, a real-time sched-
uler takes its decisions according to the urgency of
the tasks.
Tasks. The model most commonly used to describe
the tasks is the Liu and Layland one (Liu and Layland,
1973). In this model, a great abstraction is made since
a task is simply viewed as a computation time. This
means that its functional behavior is ignored as it will
be discussed in section 6. In our simulation, when
the caches are taken into consideration, some extra
parameters are necessary as explained in 6.2.1.
A task can be respectively periodic, sporadic, or
aperiodic depending on its inter-activation delay, re-
spectively constant, minimum, or unknown. A task
activation gives rise to the release of a job (an instance
of the task) that must complete before a given dead-
line date.
The tasks neither share memory nor communicate
between each other but precedence relations between
tasks may be specified so that the activation of an ape-
riodic task follows the end of another task.
Processors. We consider symmetric multiprocess-
ing hardware architectures (SMP) which are the most
common multiprocessor design nowadays. In such
architecture, the processors are identical and share a
single main memory. Private and/or shared caches are
associated to them in a hierarchical way. The model-
ing of the cache hierarchy as well as their time ac-
cess costs are given in section 6.2.2. Note that we
focus our work on architectures with less than a few
dozen processors. Thus, Network On Chip (NoC) ar-
chitectures, which present an interest for many-core
systems, are not considered.
Scheduler. Among the various scheduling strate-
gies, one distinguishes time- and event-triggered ones
depending on the conditions in which the scheduler is
invoked: a rescheduling has to be made either at spec-
ified instants, or when a job completes or a new one is
released. In addition, the scheduler may be preemp-
tive and decide to interrupt the execution of a job and
to resume it later. In the same way, schedulers may
allow tasks and their jobs to partly or freely migrate
and execute on multiple processors.
4 IMPLEMENTATION
4.1 Discrete-event Simulation
The core of the simulator is implemented using
SimPy (SimPy Developer Team, 2012), a process-
based discrete-event simulation library for Python.
The advantage of a discrete-event simulation over a
fixed-step one is that it is possible to handle short du-
rations (such as a context-switch overhead) as well as
long durations(such as a job execution) with the same
computational cost. We have chosen SimPy because
it can be easily embedded as part of a software, it is
well-documented and easy to use.
According to SimPy’s vocabulary, a Process is an
entity that can wait for a signal, a condition or a cer-
tain amount of time. When it is not waiting, a Process
can execute code, send signals or wake up other pro-
cesses. This Process state is called “active”, opposed
to “passive”. A Process is activated by another Pro-
cess or by the simulation main class itself.
The simulation unit is the processor cycle to al-
low a great precision. However, for user convenience,
the attributes of the tasks, such as the period or the
deadline, are defined in milliseconds (floating-point
numbers) and converted in cycles using a parameter
named cycles
per ms.
4.2 Architecture
The main classes and their mutual interactions are
represented in Figure 1 and described below:
• Model is the simulation entry point, it will instan-
tiate and launch the processors and the tasks as
active Processes. It will also call the init method
of the scheduler so that it can initialize its data
structures and launch timers if needed.
• A Task handles the activations of its jobs. The
activations are either periodic or triggered by an
other task (aperiodic). Depending on a property
of the task, the jobs that exceed their deadline can
be aborted.
• A Job simulates, from a time-related aspect only,
the execution of the task code. Its progression is
SimulationofReal-timeMultiprocessorSchedulingwithOverheads
7

Figure 1: Interactions between main class instances. Pro-
cessor, Task, Job and Timer are Process objects and can
have multiple instances.
computed by the execution time model (see sec-
tion 6). A signal is sent to its running processor
when it is readyand when its execution is finished.
• A Processor is the central part and simulates the
behavior of the operating system running on a
physical processor. There is one Processor for
each physical processor. It controls the state of the
jobs (running or waiting) in accordance with the
scheduler decisions. It also deals with the events:
activation or end of a job, timer timeout, sched-
ule request, etc. The attribute “running” of a pro-
cessor points to the job that is running (if any).
Figure 2 provides a very simplified diagram rep-
resenting what a processor does. Similarly, as a
real system, some actions can induce overheads
(e.g. context switch or scheduling decision) and
only affect the concerned processor.
• A Timer allows the execution of a method after
a delay, periodically or not. On a real system,
this method would run on a physical processor,
thereby inducing a context switch overhead if a
job were running on the same processor. This be-
havior is reproduced by sending a “timer” event to
the processor.
• The Scheduler is described in section 5. Unlike
the previous elements, the scheduler is not a Pro-
cess object, all its methods except the init method
are called by the Processor objects.
5 SCHEDULER COMPONENT
5.1 Scheduler Interface
In order to implement a scheduler, the user has to de-
velop a class that inherits from the abstract Scheduler
class. The scheduler interface is partly inspired by
what can be found on real operating systems such as
Figure 2: Simplified execution workflow of a Processor.
The “terminated” event is a particular event that will not
cause a context save overhead.
Linux but kept as simple as possible. This interface
allowed us to develop partitioned, global and hybrid
schedulers. The scheduler interface is shown in Fig-
ure 1.
When the simulation is started, the init method is
called. It is then possible to initialize data structures
and set timers if required. When the scheduler needs
to make a scheduling decision, it sends a “schedule”
event to the processor that will execute the schedule
method. This event is sent as a consequence of a
job activation, termination or through a timer. This
lets the possibility to write schedulers that are either
time-driven, event-driven or both. The processor is
in charge of applying the scheduling decision (which
includes an inter-processor interrupt if needed).
5.2 Handling Various Kinds of
Scheduling
In order to deal with multiprocessor scheduling, vari-
ous strategies are possible: a global scheduler for all
the processors, a scheduler for each processor,or even
intermediate solutions. The support of any kind of
scheduler is done at a user level.
Take a partitioned scheduling as an illustration of
this, we define a “virtual” scheduler that will be in-
stantiated by the simulation and called by the proces-
sors. This scheduler will then instantiate one mono-
processor scheduler for each processor and allocate
each task to one scheduler. The links between the
processors and the schedulers as well as the links be-
tween the tasks and the schedulers are saved. Thus,
when a processor calls a method of the “virtual”
scheduler, the latter retrieves the concerned scheduler
and forwards the method call to it.
By generalizing this example by allocating one
scheduler to any number of processors and by allow-
ing a task to migrate from one scheduler to another,
we see that any kind of scheduling is feasible. Thus,
this approach has the advantageof being very flexible.
SIMULTECH2013-3rdInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
8

Moreover, we provide a few examples to guide.
5.3 Lock
For global or hybrid strategies, some scheduler vari-
ables (such as the list of ready tasks) are shared be-
tween the processors. As a consequence, a protection
mechanism can be required to avoid inconsistencies.
Such protections form a bottleneck which induces ex-
tra overheads.
A mechanism of lock is provided by the simulator
in order to reproduce these overheads. This lock is
intended to prevent to run the scheduler at the same
simulation time on two or more different processors.
The developer of a scheduler can decide to deactivate
the lock by overriding the get
lock method.
5.4 Example
In this section, we present what a user could de-
velop to simulate a global EDF. The source code is
in Python.
A detailed explanation of this example is available
in the documentation of the tool. Instead we would
like to draw the reader’sattentionon the small number
of lines required. An actual implementation of this
policy in an operating system would require hundreds
of lines.
from core import Scheduler
class G_EDF(Scheduler):
"""Global Earliest Deadline First"""
def init(self):
self.ready_list = []
def on_activate(self, job):
self.ready_list.append(job)
# Send a "schedule" event to the processor.
job.cpu.resched()
def on_terminated(self, job):
# Send a "schedule" event to the processor.
job.cpu.resched()
def schedule(self, cpu):
decision = None # No change.
if len(self.ready_list) > 0:
# Get a free processor or the processor run-
# ning the job with the latest deadline.
key = lambda x: (1 if not x.running else 0,
x.running.absolute_deadline
if x.running else 0)
cpu_min = max(self.processors, key=key)
# Get the job with the highest priority
# within the ready list.
job = min(self.ready_list,
key=lambda x: x.absolute_deadline)
# If the selected job has a higher priority
# than the one running on the selected cpu:
if (cpu_min.running is None or
(cpu_min.running.absolute_deadline >
job.absolute_deadline)):
self.ready_list.remove(job)
if cpu_min.running:
self.ready_list.append(cpu_min.running)
# Schedule job on cpu_min.
decision = (job, cpu_min)
return decision
6 JOB COMPUTATION TIME
6.1 A Generic Approach
Generally, scheduling simulation tools consider only
the worst-case execution time (WCET) for the execu-
tion time of the jobs. Depending on the tool, the user
may also have the possibility to configure the simu-
lator to use the average-case execution time (ACET)
or a random duration between the best-case execution
time (BCET) and the WCET.
One of our objectives is to take into consideration
the impact of the memory accesses on the computa-
tion time in order to be as accurate as possible. A sig-
nificant difference with the classical approach is that
the total execution time of a job can only be known
when it finishes. Indeed, the execution time depends
on the scheduling decisions (which tasks were execut-
ing on the other processors, was it preempted, etc.).
The components needed to compute the execution
time are purposely isolated from the rest of the sim-
ulator and implement a generic interface to interact
with the simulator. As shown in Figure 3, the model
receives an event when the state of a job is changed.
The job uses the get
ret method to get a lower bound
of its remaining execution time. While this duration
is strictly positive, the job is not finished.
For example, a computation time model based on
the WCET is trivial. The get
ret method simply re-
turns the WCET minus the duration already spent to
run the job. The remaining methods of the interface
have nothing to do because that duration is given and
kept up-to-date by the job itself.
This design is sufficiently generic to easily swap
the models used to compute the execution time of the
jobs. Hence, alternative models could be developed to
simulate a different hardware or to adjust the accuracy
of the results.
SimulationofReal-timeMultiprocessorSchedulingwithOverheads
9

Figure 3: Interface of any execution time model.
6.2 Modeling Memory Behaviors
In this section, we briefly present how the impact of
the caches is implementedas an execution time model
as explained above.
6.2.1 Memory Behavior of a Task
In order to characterize the memory behavior of the
tasks, we extended the model of Liu-Layland with ad-
ditional information. For each task τ, the user must
provide:
• Number of instructions: the average number of
instructions executed by a job of τ.
• Base CPI: the average number of cycles required
to execute an instruction without considering the
memory access penalties (base
cpi
τ
).
• Memory access rate: mix
τ
is defined as the pro-
portion of instructions that access the memory
among all.
• Stack distance profile (SDP): the distribution of
the stack distances for all the memory accesses
of a task τ is the stack distance profile (sdp
τ
),
where a stack distance is by definition the number
of unique cache lines accessed between two con-
secutive accesses to a same line (Mattson et al.,
1970). An illustration of this distance is provided
by Figure 4. Such metric can be captured for
both fully-associative and N-way caches (Chan-
dra et al., 2005; Babka et al., 2012).
3
1
0
1
t
A B C B B D A D
Figure 4: Memory accesses sequence. A, B, C and D are
cache lines and numbers indicate the stack distances.
These information can be automatically generated
or retrieved from a real application. The number of
instructions, the memory access rate and the stack dis-
tance profile can be generated using tools such as an
extension to CacheGrind (Babka et al., 2012), Stat-
Stack (Eklov and Hagersten, 2010) or MICA
2
(Hoste
2
MICA does not generate complete SDP so we had to
patch it.
and Eeckhout, 2007). The base CPI requires a cycle
accurate simulator. It is the computation time in cy-
cles divided by the number of instructions.
6.2.2 Cache Hierarchy
We consider hierarchical cache architectures. A list
of caches (e.g. [L1, L2, L3]) can be associated to
each processor. Caches can be shared between several
processors while it respects the inclusive
3
property.
A cache is defined by a name, its associativity, its
size, and the time needed to reach it (in cycles).
For now, only data caches with Least Recently
Used (LRU) as replacement policy is considered, the
generalization to instruction caches is left for future
work. Hence, a few modifications in the cache de-
scription are likely to occur in order to make the dis-
tinctions between instruction caches, data caches and
unified caches.
6.2.3 Cache Models
Depending on which tasks are running in concurrency
and the initial state of the caches, the execution speed
of the jobs varies.
The goal of the cache models is to determine, on a
given time interval, the average number of cycles per
instructions (CPI) of a job, taking in consideration the
impact of the various tasks on the caches. Using the
CPI, it is then possible to determine the number of
instructions executed by a job during that interval.
The duration returned by the get
ret method (see
Figure 3) is simply the time required to execute the re-
maining number of instructions if the job was running
alone on the system without any interruption.
Cache sharing induces two kinds of extra cache
misses:
• Following a preemption: a job may have lost its
cache affinity when another job is running on the
same processor. Some of the evicted lines should
then be reloaded.
• Shared between multiple processors: two or more
tasks that are simultaneously running on differ-
ent processors with a shared cache, do not tend
to share this cache equally.
For the first case, we have taken the simplifying
assumption that the cache filling follows an exponen-
tial distribution and we use the SDP of the task to de-
termine the number of lines that should be reloaded.
However, other models exist (Liu et al., 2008) and we
3
Caches are inclusives if any data contained in a level of
cache is contained on the upper level.
SIMULTECH2013-3rdInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
10
are also currently working on better estimations of the
cache loading using Markov chains.
For the second case, we used the FOA
model (Chandra et al., 2005) that has fast running
times and gives reasonable results according to the
authors. Obviously, other models (Eklov et al., 2011;
Chandra et al., 2005; Babka et al., 2012) could be im-
plemented as well.
The state of the caches (the number of lines for
each task) is kept up-to-date at each change in the sys-
tem (start, interruption or end of a job).
7 SIMULATION TOOL
7.1 Features
Open Source. The source code, the documen-
tation and the examples are freely available at
http://homepages.laas.fr/mcheramy/simso/.
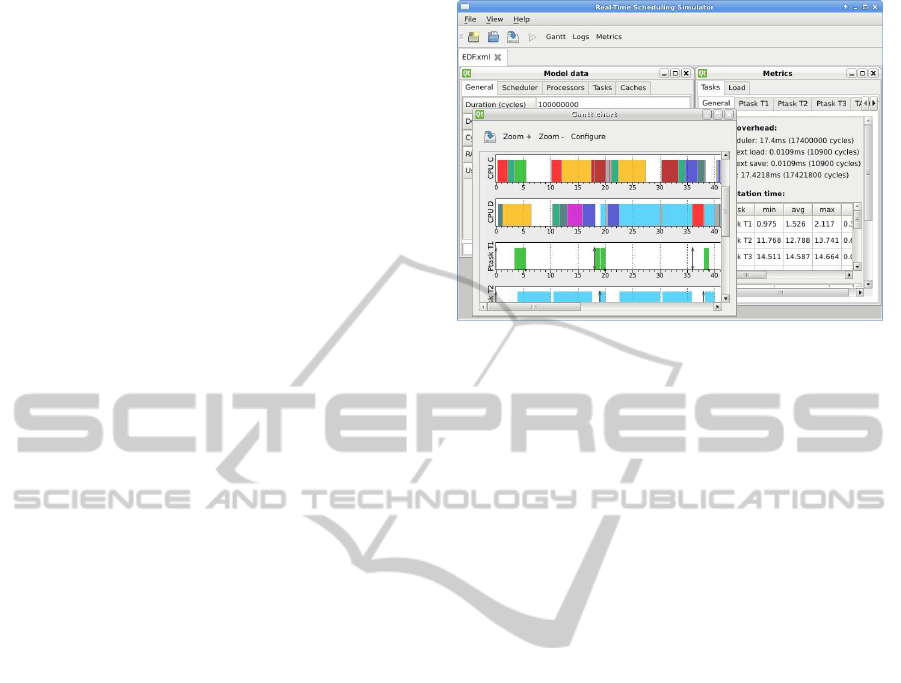
Configuration. The user interface of the simulator
(Figure 5) provides a straightforward graphical inter-
face to load the scheduler class and to define the tasks,
the processors, the caches and their hierarchy, and the
various parameters for the simulation. The resulting
configuration is saved into an XML file. However,
such a file could also be generated automatically by
an external tool without using the graphical user in-
terface. This is important in order to run extensive
simulations with auto-generated properties.
Output. When the configuration is completed and
checked, the user can launch the simulation and ob-
tain a Gantt chart representing the result of the sim-
ulation or a textual equivalent representation. Some
metrics are provided to the user such as the number of
preemptions, migrations, the time spent in the sched-
uler, the computation time of each job, etc.
Speed and Limitations. The simulation runs very
fast, as an example, simulating a global EDF with 4
processors, 10 tasks, 2 levels of caches for a duration
of 100ms (10
8
cycles) takes less than one second on
an Intel Core i5. There are no technical limitations on
the number of processors but the cache models imple-
mented in the present version have not been validated
by their authors for a large number of processors.
7.2 Use as an Educational Tool
The user interface of the simulator has been designed
keeping in mind it could also be used for an educa-
Figure 5: User interface of the tool showing the simulation
of a global EDF.
tional purpose. This is the main reason why all the
inputs can be set through a graphical user interface
and the results displayed in a Gantt chart.
As shown in the previous example, it allows a
fast prototyping of schedulers in Python. This lan-
guage is easy to learn and yet very powerful and ef-
fective (Radenski, 2006).
Regarding the simulation, it is also possible to
consider WCETs as effective task computation times.
Thus, the input is simpler and more usual.
This tool is already used by Master’s students in a
real-time systems course at INSA Toulouse. From an
applicative real-time project, students have to model
its various tasks and then use the simulator to under-
stand how the processors are shared between the tasks
using a fixed priority scheduler.
7.3 Application Example
As a reminder, our primary goal is the study of
scheduling policies. In the following, we present
through a simple case study, how our tool could be
used to better understand the real behavior of a sys-
tem.
Problem Description. In this example, we would
like to compare the scheduling of a system using the
Earliest Deadline First algorithm with a global (G-
EDF) and a partitioned (P-EDF) strategy. G-EDF is
a generalization of EDF for multiprocessor that uses
a single ready task queue whereas P-EDF starts with
a definitive allocation of the tasks on the processors
and then runs multiple mono-processor EDF sched-
ulers for handling each processor.
SimulationofReal-timeMultiprocessorSchedulingwithOverheads
11
Input. The eight considered tasks are all periodic
4
and synchronous with the start of the simulation.
Their SDP was taken from the MiBench bench-
mark (Guthaus et al., 2001), the first five tasks are
making more accesses to the memory than the last
three (according to their value of mix).
For the task partitioning phase (P-EDF only), a
WCET for each task is mandatory. WCET values
were chosen by boundingwith a safety gap the experi-
mental times given by the simulation. Table 1 synthe-
sizes the period and WCET values of the tasks. Task
partitioning was done using the First Fit algorithm.
The result of the partitioning is: {T1, T2}, {T3, T4,
T5}, {T6, T7}, {T8}.
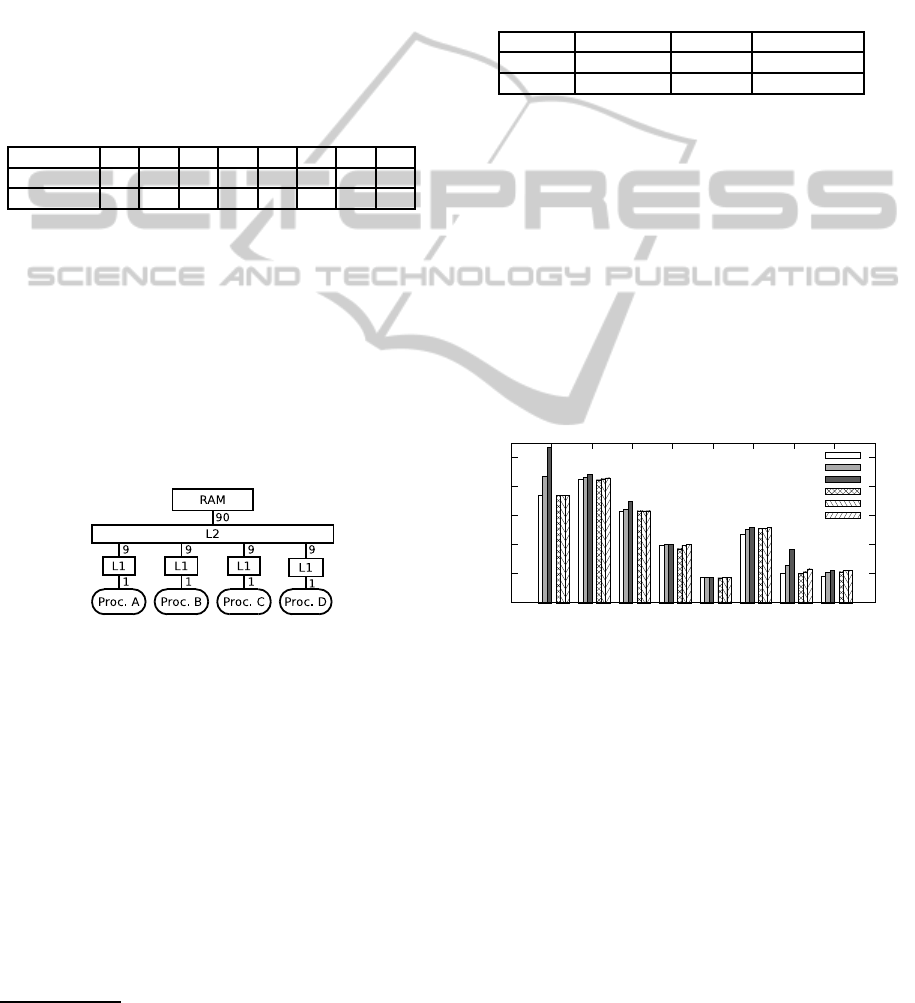
Table 1: List of tasks (total utilization is 82.5%).
T1 T2 T3 T4 T5 T6 T7 T8
Period (ms) 20 20 15 15 10 10 10 10
WCET (ms) 11 9 7 5 2 6 4 3
The simulated hardware architecture, including
four processors and a cache hierarchy, is summa-
rized in Figure 6. Each L1-cache is an LRU fully-
associative cache of 2KiB (32 lines of 64 bytes). The
L2 cache is an LRU fully-associative cache of 16KiB
(256 lines of 64 bytes). The second level of cache is
relatively small when compared to what can usually
be found on modern architectures. This choice is jus-
tified by the small memory footprint of the selected
benchmarks and the will to show the impact of cache
contention through this example.
Figure 6: Simulated hardware architecture. Numbers repre-
sent the access time in cycles (10
−9
s).
The scheduling overhead is set to 0.1ms (100.000
cycles) and a context save or load overhead to
0.0001ms (100 cycles).
The duration of the simulation is ten seconds.
Observations. Table 2 shows the load using both
strategies. The payload corresponds to the time spent
executing the tasks (including cache overheads) and
the system load is the time wasted in the system
(scheduler and context-switch overheads). Because
of the order of magnitude of a scheduling overhead
compared to the overhead of a context save or load,
the system load is mostly the time spent waiting for
4
A periodic task releases a job every period time units.
a scheduler decision. The number of scheduling de-
cisions remains similar in both cases, however, the
global lock required for G-EDF adds an additional
overhead. We can assume that this gap in system load
between the two strategies will increase with more
processors. This is in accordance with the results of
Bastoni et al stating that G-EDF is not a viable choice
for hard real-time systems with a large number of pro-
cessors (24 in their study) (Bastoni et al., 2010).
Table 2: Load for both schedulers.
Total load Payload System load
G-EDF 72.2 % 68.0 % 4.2 %
P-EDF 68.3 % 65.1 % 3.2 %
The computation time of the jobs are shorter with
P-EDF compared to G-EDF as shown in Figure 7. In
proportion to G-EDF, the payload for P-EDF is 4.2%
lower in this example. The first reason is that the tasks
that use the more the memory are merged in the first
two processors, partly avoiding co-scheduling. The
second reason is the reduction of the number of pre-
emptions (1501 for G-EDF against only 666 for P-
EDF) and task migrations (3500 against 0) which led
to less cache reloading.
This result seems compatible with the work done
by Fedorova et al that shows in their case study an
improvement of the system throughput of 16-32% for
a non-real-time system (Fedorova et al., 2006).
0
2
4
6
8
10
T1 T2 T3 T4 T5 T6 T7 T8
min (G-EDF)
avg (G-EDF)
max (G-EDF)
min (P-EDF)
avg (P-EDF)
max (P-EDF)
Figure 7: Effective task Computation times.
Obviously, in order to confirm these results, we
shall conduct larger studies. Because the duration of
a simulation run is very short, it is then possible to
run thousands of experiments with different configu-
rations. Such complete studies are in progress but out
of scope of this paper.
8 RELATED WORK
Most of the work on real-time multiprocessor
scheduling addresses the theory only. Davis and
Burns give a good insight of the current state of the
researches in their survey (Davis and Burns, 2011).
A first approach for considering real-world over-
SIMULTECH2013-3rdInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
12

heads in the study of such scheduling policies is to
use a cycle-accurate simulator or a real system.
There are two major simulator available. The first
one, Gem5 is the merger of the M5 and GEMS simu-
lators (Binkert et al., 2011). It simulates a full system
with various CPU models and a flexible memory sys-
tem that includes caches. The second one, Simics, is a
commercial product able to simulate full-systems but
it is not cycle-accurate (Magnusson et al., 2002).
LITMUS
RT
(Calandrino et al., 2006), developed
at the University of North Carolina (UNC), offers a
different approach. It is not a simulator but an exten-
sion of the Linux Kernel which provides an exper-
imental platform for applied real-time research and
that supports a large number of real-time multipro-
cessor schedulers.
With both kind of tools, a substantial investment
in time is required to learn how to use them and to
write some new scheduler components.
There are also several tools emerging from the
academic community and dedicated to the simula-
tion of real-time systems such as Cheddar (Singhoff
et al., 2004), MAST (Harbour et al., 2001),
Storm (Urunuela et al., 2010) and others (Rodr´ıguez-
Cayetano, 2011; Chandarli et al., 2012). Most of
these tools are designed to validate, test and analyze
systems. Storm is probably the most advanced tool
focusing on the study of the scheduler itself. However
it does not handle direct overheads such as context-
switches or scheduling overheads. Nor does it handle
the impact of caches.
9 CONCLUSIONS
This paper presents a simulator dedicated to the study
of real-time scheduling. It was designed to be easy
to use, fast and flexible. Our main contribution,
when compared to the existing scheduling simulators,
is the integration of overheads linked to the system
(context-switching, scheduling decision) and the im-
pact of the caches.
We have shown in this paper that it is possible
to take the impact of the caches into consideration.
However, the models we currently use could proba-
bly be replaced by better ones. This replacement can
easily be done as explained in section 6. We are al-
ready thinking about new models but they have to be
validated using cycle accurate simulators.
Once our cache models will be validated and inte-
grated into the simulator, we will launch a large cam-
paign of simulations. As a reminder, our long term
goal is the classification of the numerous scheduling
policies with practical considerations. We hope that it
will also help the researchers to spot the weaknesses
and the strengths of the various strategies. We would
be pleased if our simulation tool could be the source
of innovative ideas.
ACKNOWLEDGEMENTS
The work presented in this paper was conducted
under the research project RESPECTED (http://anr-
respected.laas.fr/) which is supported by the French
National Agency for Research (ANR), program
ARPEGE.
REFERENCES
Anderson, J., Calandrino, J., and Devi, U. (2006). Real-
time scheduling on multicore platforms. In Proc. of
the 12th IEEE Real-Time and Embedded Technology
and Applications Symposium (RTAS).
Babka, V., Libiˇc, P., Martinec, T., and T˚uma, P. (2012). On
the accuracy of cache sharing models. In Proc. of the
third joint WOSP/SIPEW International Conference on
Performance Engineering (ICPE).
Bastoni, A., Brandenburg, B., and Anderson, J. (2010). An
empirical comparison of global, partitioned, and clus-
tered multiprocessor edf schedulers. In Proc. of the
IEEE 31st Real-Time Systems Symposium (RTSS).
Bastoni, A., Brandenburg, B., and Anderson, J. (2011). Is
semi-partitioned scheduling practical? In Proc. of
the 23rd Euromicro Conference on Real-Time Systems
(ECRTS).
Berna, B. and Puaut, I. (2012). Pdpa: period driven task and
cache partitioning algorithm for multi-core systems.
In Proc. of the 20th International Conference on Real-
Time and Network Systems (RTNS).
Binkert, N., Beckmann, B., Black, G., Reinhardt, S. K.,
Saidi, A., Basu, A., Hestness, J., Hower, D. R., Kr-
ishna, T., Sardashti, S., Sen, R., Sewell, K., Shoaib,
M., Vaish, N., Hill, M. D., and Wood, D. A. (2011).
The gem5 simulator. SIGARCH Computer Architec-
ture News.
Calandrino, J. M., Leontyev, H., Block, A., Devi, U. C., and
Anderson, J. H. (2006). Litmus
RT
: A testbed for em-
pirically comparing real-time multiprocessor sched-
ulers. In Proc. of the 27th IEEE International Real-
Time Systems Symposium (RTSS).
Chandarli, Y., Fauberteau, F., Masson, D., Midonnet, S.,
and Qamhieh, M. (2012). Yartiss: A tool to visual-
ize, test, compare and evaluate real-time scheduling
algorithms. In 3rd International Workshop on Analy-
sis Tools and Methodologies for Embedded and Real-
time Systems (WATERS).
Chandra, D., Guo, F., Kim, S., and Solihin, Y. (2005). Pre-
dicting inter-thread cache contention on a chip multi-
processor architecture. In Proc. of the 11th Inter-
national Symposium on High-Performance Computer
Architecture (HPCA).
SimulationofReal-timeMultiprocessorSchedulingwithOverheads
13

Davis, R. I. and Burns, A. (2011). A survey of hard real-
time scheduling for multiprocessor systems. ACM
Computing Surveys, 43(4).
Devi, U. and Anderson, J. (2005). Tardiness bounds under
global edf scheduling on a multiprocessor. In Proc. of
the 26th IEEE Real-Time Systems Symposium (RTSS).
Eklov, D., Black-Schaffer, D., and Hagersten, E. (2011).
Fast modeling of shared caches in multicore systems.
In Proc. of the 6th International Conference on High
Performance and Embedded Architectures and Com-
pilers (HiPEAC).
Eklov, D. and Hagersten, E. (2010). StatStack: efficient
modeling of LRU caches. In Proc. of the IEEE Inter-
national Symposium on Performance Analysis of Sys-
tems Software (ISPASS).
Fedorova, A., Seltzer, M., and Smith, M. (2006). Cache-
fair thread scheduling for multicore processors. Tech-
nical Report TR-17-06, Division of Engineering and
Applied Sciences, Harvard University.
Guan, N., Stigge, M., Yi, W., and Yu, G. (2009). Cache-
aware scheduling and analysis for multicores. In Proc.
of the 7th ACM international conference on Embedded
Software (EMSOFT).
Guthaus, M., Ringenberg, J., Ernst, D., Austin, T., Mudge,
T., and Brown, R. (2001). Mibench: A free, commer-
cially representative embedded benchmark suite. In
Proc. of the IEEE International Workshop on Work-
load Characterization (WWC-4).
Harbour, M. G., Garc´ıa, J. J. G., Guti´errez, J. C. P., and
Moyano, J. M. D. (2001). Mast: Modeling and
analysis suite for real time applications. In Proc. of
the 13th Euromicro Conference on Real-Time Systems
(ECRTS).
Hoste, K. and Eeckhout, L. (2007). Microarchitecture-
independent workload characterization. Micro, IEEE,
27(3).
Liu, C. L. and Layland, J.(1973). Scheduling algorithms for
multiprogramming in a hard-real-time environment.
Journal of the ACM, 20.
Liu, F., Guo, F., Solihin, Y., Kim, S., and Eker, A. (2008).
Characterizing and modeling the behavior of context
switch misses. In Proc. of the 17th international
conference on Parallel architectures and compilation
techniques (PACT).
Magnusson, P., Christensson, M., Eskilson, J., Forsgren, D.,
Hallberg, G., Hogberg, J., Larsson, F., Moestedt, A.,
and Werner, B. (2002). Simics: A full system simula-
tion platform. Computer, 35(2).
Mattson, R., Gecsei, J., Slutz, D., and Traiger, I. (1970).
Evaluation techniques for storage hierarchies. IBM
Systems Journal, 9(2).
Mogul, J. C. and Borg, A. (1991). The effect of context
switches on cache performance. SIGOPS Oper. Sys-
tems Review, 25.
Nelissen, G., Funk, S., and Goossens, J. (2012). Reducing
preemptions and migrations in ekg. In IEEE 18th In-
ternational Conference on Embedded and Real-Time
Computing Systems and Applications (RTCSA).
Radenski, A. (2006). “python first”: a lab-based digital in-
troduction to computer science. In Proc. of the 11th
annual SIGCSE conference on Innovation and Tech-
nology In Computer Science Education (ITICSE).
Rodr´ıguez-Cayetano, M. (2011). Design and development
of a cpu scheduler simulator for educational purposes
using sdl. In System Analysis and Modeling: About
Models. Springer Berlin / Heidelberg.
SimPy Developer Team (2012). http://simpy.
sourceforge.net/.
Singhoff, F., Legrand, J., Nana, L., and Marc´e, L. (2004).
Cheddar: a flexible real time scheduling framework.
Ada Lett., XXIV(4).
Urunuela, R., D´eplanche, A.-M., and Trinquet, Y. (2010).
Storm a simulation tool for real-time multiprocessor
scheduling evaluation. In Proc. of the Emerging Tech-
nologies and Factory Automation (ETFA).
SIMULTECH2013-3rdInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
14
