
Developing Embedded Control Systems with XtratuM
Application to Control the Attitude of a Mini-helicopter
P. Garc´ıa
1
, P. Albertos
1
, A. Crespo
1
and F. Gonz´alez
2
1
Institute of Autom´atica e Inform´atica Industrial, Universitat Politecnica de Valencia, Valencia, Spain
2
Universidad Central de las Villas, Santa Clara, Cuba
Keywords:
Embedded Control Systems, Development Platform, UAV Control.
Abstract:
Developing embedded control systems requires to have the possibility of analyzing and evaluating new control
algorithms before their implementation in the final system as well as their robust operation once implemented.
For that purpose, a generic platform composed by the hypervisor XtratuM and RTOS PaRTiKLe is introduced
in this paper. The interaction between the user and the process is generated by using Linux, while the real-
time execution of the process is ensured by PaRTiKLe. Moreover, hypervisor XtratuM provides the facilities
to execute several partitions with different guest OSs as well as the mechanisms to communicate PaRTiKLe
partition and the control environment. By means of this platform the performance of future partitioned em-
bedded systems are analyzed, evaluated and improved. Experimental tests are carried out in order to prove the
effectiveness of the system. The reported results show the good performance of the designed system and the
robustness of the platform.
1 INTRODUCTION
One of the latent problems when working on embed-
ded control systems (ECS) is the lack of a platform
to evaluate the control algorithm before being em-
bedded. This pre-validation of the control algorithm
would save substantial time, which can be normally
tedious, to adjust the controller gains. Moreover, po-
tential system failures can be detected before the con-
trol is put into operation and, in this way, avoid eco-
nomic losses.
Recent advances in software technology, have
produced a tendency to design, develop and inte-
grate more software and hardware components for
real-time embedded systems. Example can be found
in aeronautics, automobile equipment, in mobile
telecommunication, and so on. The capacity to sup-
port real time activities, device drivers access, fault
tolerance and minimal distribution of software and
hardware (Kopetz, 2011) are the main aspects to con-
ceive an ECS.
It was in the avionics field were the partitioned
systems were proposed and developed in order to in-
crease the security and predictability of the control
systems. The foundations of this approach are pre-
sented in (Rushby, 1999). Today, partitioned systems
are being evaluated and promoted in several fields of-
fering the services and mechanisms to build up safe
and secure embedded systems (AUTOSAR, ), (M. H.
Deredempt, A. Crespo et al., 2012).
The use of partitioned systems permits to develop
mixed criticality applications where some partitions
may have different levels of temporal constraints or
security properties (Commision, 2012). In control
systems, the partitioned systems can involved one
or several partitions with real-time operating systems
executing control activities and other partitions with
general purpose OSs than can provide the graphical
and end-users interfaces and other remote services.
The system is executed on top of a hipervisor that pro-
vides virtual machines to the partitions.
This approach allows a feasible and optimized
software implementation with a better resource usage,
and this in turn results in a cost reduction. Therefore,
the main qualities of such a well-engineered software
should lie in its capacity to support fast, easy-to-use,
low-cost solutions, while guaranteeing, at the same
time, a predefined quality of service. Moreover, eval-
uate the performance of the software and hardware is
also necessary and very important before the control
system is embedded.
Currently, there are evaluating methods for em-
bedded systems but they are only valid for specific ap-
plications or specific programming languages. Like-
434
García P., Albertos P., Crespo A. and González F..
Developing Embedded Control Systems with XtratuM - Application to Control the Attitude of a Mini-helicopter.
DOI: 10.5220/0004484504340441
In Proceedings of the 10th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2013), pages 434-441
ISBN: 978-989-8565-70-9
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

wise, the use of these systems leads to high develop-
ment costs and maintenance, besides requiring a deep
knowledge of them. On the other hand, the imple-
mentation of control laws in these evaluation systems
must obey certain pre-established criteria for the sys-
tem. This can result in a problem, since the control
algorithm would have to be adjusted or reconfigured,
producing a change in its structure and in the system
behavior when finally applied.
To our knowledge, there is not yet a generic plat-
form, in process control, being able to implement dif-
ferent types of operating systems and/or processes.
The use of an open-source hypervisor and RTOS
(PaRTiKLe), could improve the development process
in many ways, such as a low price in the development
and maintenance and good robustness when other ap-
plications are running. Specifically, the model of de-
velopment conceived in the open source community
could be successfully adapted to the design and im-
plementation of real-time critical application, improv-
ing the reliability and the extensibility of the software
components.
In this paper we introduce a new partitioned plat-
form composed by XtratuM and PaRTiKLe systems,
allowing a robust design of embedded control sys-
tems. A Linux partition provides the advantage of the
interaction between the user and the process, while
PaRTiKLe partition ensures the real-time execution
of the control tasks even when the system is run-
ning other tasks. XtratuM allows for strong safety of
the application, always required in ECS. The major
applications of the platform are to analyze, evaluate
and improve the performance of future embedded sys-
tems. Additionally, the proposed platform can be used
in critical embedded systems, i.e. where the dynamics
of the system is very fast and the processing time must
be executed under strict constraints. A more detailed
description of the proposed platform is presented in
section 2.
The validation of the platform and its application
to the design of embedded control systems for fast
dynamic plants (UAV) are introduced in section 3. A
comparison of the proposed platform with respect to
a platform under only Linux RT environment is also
provided. Finally, some comments and conclusions
are included in the last section.
2 SYSTEM DESCRIPTION
Embedded control systems are increasingly being
used in safety critical applications and infrastructures
such as, aircraft flight control and electric grids (Cre-
spo and Alonso, 2006) (Parkinson and Kinnan, 2003)
(J. Loyall and Fernandez., ). It is well known that,
the integrity of these critical systems will depend on
the good performance of the installed software com-
ponents. And, a bad performance or losing data in
the framework, may cause massive material and even
human life losses.
In many critical systems, and the proposed plat-
form is not an exception, it is required that numerous
software functions with varying levels of exigency
(for example, hard, soft and non real time tasks) are
running at the same time. This kind of integration
creates a special challenge because it is required to
guarantee the execution of every task and the non in-
terference with each other. In (Masmano et al., 2009),
the authors present a software architecture based on
a virtualization layer offering virtual machines to ex-
ecute partitions. This approach offers the capability
to define several partitions guaranteing their temporal
and spatial isolation and achieving the deterministic
behavior required by safety-critical systems.
To ensure the previous requirements, the designed
platform uses an open source based hypervisor (Xtra-
tuM) which executes real-time constrained partitions
based on PaRTiKLe RTOS. Moreover, this fact will
facilitate the reuse of the code and will enable the de-
velopment of more complex software without sacri-
ficing real-time performance. In the following, the
main characteristics of XtratuM and ParTiKle sys-
tems are described.
2.1 XtratuM
XtratuM is an hypervisor for embedded devices,
it provides a framework to run multiple concur-
rent operating systems in a robust partitioned en-
vironment (Masmano et al., 2005). XtratuM can
be also defined as an open source nanokernel
(www.opensource.org/docs/definition.php, ), just im-
plementing two simple device drivers: interrupt and
timer. Likewise, XtratuM can be considered as a
small subset of the lowest operating system layers that
can meet the hard real-time system requirements: fast,
compact, portable, simple and predictable.
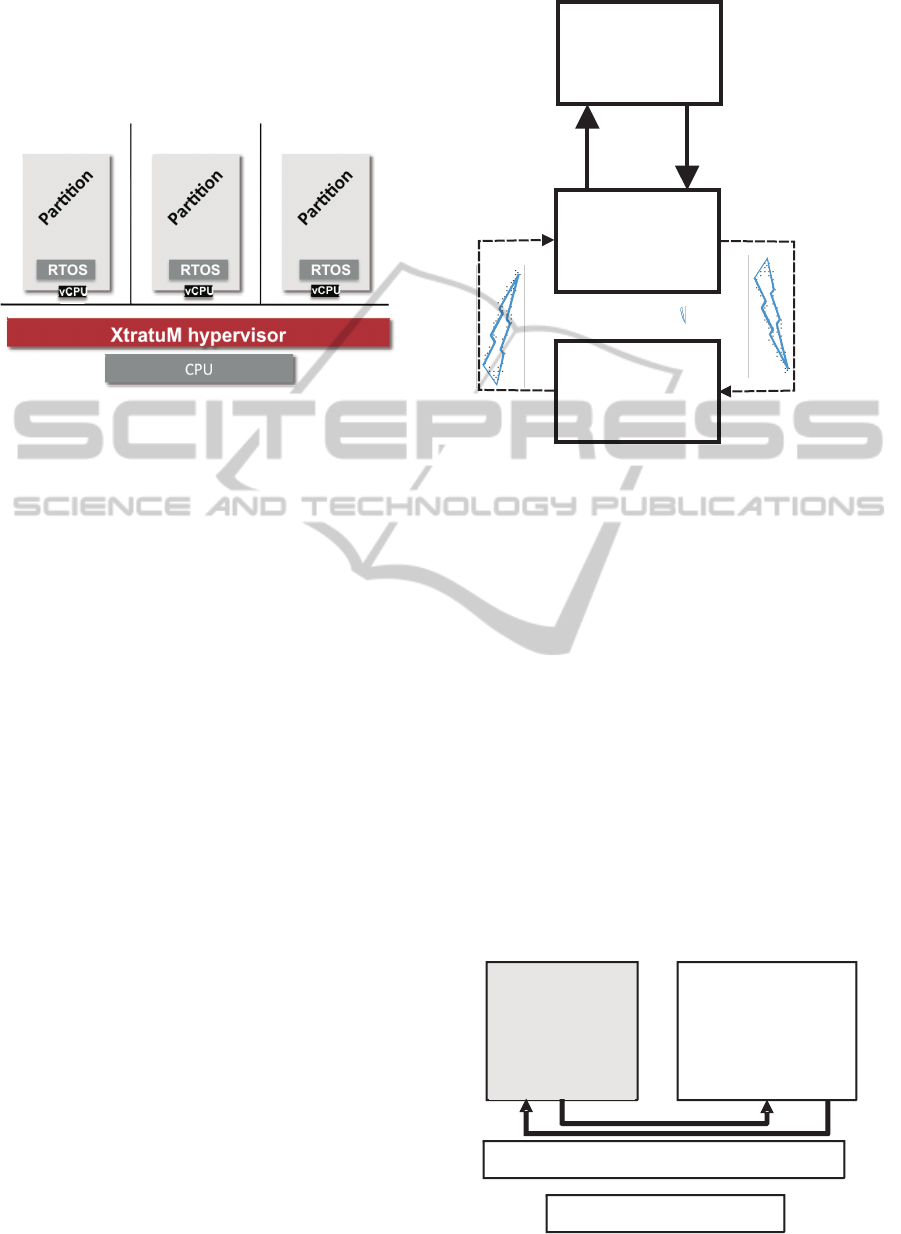
The main characteristics of the XtratuM system
are (see Figure 1):
• Bare metal hypervisor designed for real-time em-
bedded systems.
• Several partitions can be simultaneously executed
• Every partition contains the most appropriated OS
according to the application needs.
• Every partition is executed in separated memory
areas or regions. It prevents for errors or attacks
DevelopingEmbeddedControlSystemswithXtratuM-ApplicationtoControltheAttitudeofaMini-helicopter
435
outside of the partition creating a new and higher
level of security.
• Every partition may have different level of secu-
rity.
Figure 1: XtratuM structure.
For critical control processes, these features are
very important, because the execution of two different
systems at the same time, should give quick access to
some devices or files and an easy interaction between
the user and the process, and at the same time guaran-
tee the implementation and execution of the tasks in a
RTOS domain. Additionally, the last two feature are
essential to fulfill security requirements in security-
critical real-time systems. For example, working in
a system composed by Linux and RTOS domains, if
a computer attack happens to the Linux domain, it
should not affect the control law execution embedded
in the RTOS domain.
An example of this can be an engine control pro-
gram with a graphic interface. The application can
be split into two parts: the control algorithm which
interacts with the process to be controlled, with hard
real-time and fault-tolerance requirements (where the
use of a hard RTOS is compulsory) and the graphic
interface, without real-time requirements, displaying
interesting data or accepting some input commands.
Figure 2 introducesGNU/Linux and PaRTiKle en-
vironments implemented in XtratuM (see details in
section 3.2). The main characteristic of this configu-
ration is the effectiveness to separate the priority tasks
being executed by ParTiKle from the other ones per-
formed by GNU/Linux. This fact yields the system’s
behavior stable even if an error appears in the general
system. The PaRTiKle partition forward data to the
Linux one, to be independently treated, and receives
from that one updating of the control algorithms or
tuning parameters.
MMIandother
applications
LINUX
RT-tasks
PaRTiKle
Criticalprocess
UFO
Internal
Communication
Channels
Wireless
Figure 2: Critical process and software platform.
2.2 PaRTiKle Partition
PaRTiKle is an embedded real-time operating system,
distributed under the terms of the GNU Public Li-
cense (Peiro et al., 2007). It provides features such as
full preemptability, minimal interrupt latencies, syn-
chronization primitives, scheduling policies, and in-
terrupt handling mechanisms, needed for critical ap-
plications with hard real time constrains.
Additionally, PaRTiKle brings support, in a bare
machine, for multiple execution environments such as
for example, a Linux regular process and a hypervi-
sor domain, see Figure 3. Although, PaRTiKle was
designed to be POSIX compatible, it can also provide
support forC++, Ada and Java languages, and it fur-
nishes a standard C library in the application context.
Hardware
XtratuM
PartiKle
Control tasks
Linux
Applications
Realtime
partition
Nonrealtime
partition
Figure 3: PaRTiKle as XtratuM domain.
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
436

These characteristics help to design different levels of
abstraction in the process and control domains. This
is very useful to reuse the code and to make shorter
the development cycle.
Likewise, the PaRTiKle’s kernel provides addi-
tional characteristics like thread scheduling, synchro-
nization, timer and communication primitives. On the
other hand, it also handles hardware resources, such
as, interrupts, exceptions, memory, timers, etc.
A brief summary of the main characteristics of
PaRTiKle system as it is implemented nowadays is
as follows:
Scheduling: The scheduler only implements a Rate-
Monotonic (RM) scheduling policy.
Timing Management: It provides multiple virtual
timers to the kernel and the application.
Physical Memory Management: It is able to man-
age the free available physical memory.
Kernel Library: There is only a minimal C library
used by the kernel. This library cannot be ac-
cessed by the application.
System Call: All kernel services are provided via a
single entry point.
2.3 The Designed Platform
The physic platform is composed by a processor (up
or equal to pentium II), the software described previ-
ously, and the input/ouput cards. The platform can be
thus connected to the process to control or evaluate.
The items added to the platform will depend to the
process to study.
The designed platform presents some advantages
with respect to others in the literature, such as
• Some tests, developed by using several Linux
tools, can be done using PaRTiKle, like a Linux
process.
• The platform can be executed using PaRTiKle like
being a XtratuM domain and, at the same time,
take advance of the Linux domain (persisting data,
monitoring some value, etc).
• The final program can be embedded using PaR-
TiKle as a bare machine.
• The platform is portable (different hardware un-
der the same software can be implemented), con-
figurable and maintainable (Peiro et al., 2007).
In addition, all the main components in the plat-
form, GNU/Linux, PaRTikle and XtratuM, are based
on the well known open standard languages (POSIX,
ARINC)
1
. Likewise, future works in the proposed
platform will use some important advantages of these
languages, for example, the temporal nature of Ada
or the facilities to create strong interfaces in C++ and
Java.
To prove the robustness of the proposed platform
and to verify the behavior of some important param-
eters, a real-time analysis of the experiment can be
done using the jitter performance evaluation tool (as
reported in (Berna et al., 2011)). In fact, it is well
known that certain values of the jitter can degrade the
control performance and in extreme cases even cause
instability of the closed-loop system, see (Stothert and
MacLeod, 1998) (Shin and Cui, 1995).
In the experiments here performed, heavy compu-
tation load tasks have been concurrently run with the
RT control tasks. If the load is too high, there are not
enough resources. The control tasks performance is
shown not being affected by the system degradation.
3 PLATFORM VALIDATION
To validated the proposed platform two kinds of
experiments are presented in this section. First,
a Quanser Helicopter with four rotors is used
((Quanser, 2007)). The performance of the platform
is tested in order to stabilize the roll angle in a desired
position. This is a ’subcritic’ process because the
helicopter is placed on a base platform in such a
way that the attitude is the only possible variable
to be stabilized. This base platform avoids the
helicopter crashing in case that the controller is not
able to stabilize it. The second experiment is also
devoted to stabilize the attitude of the helicopter
but flying in 3D. In this helicopter any wrong
measurement from the sensors and/or malfunction
of the microcontroller will result in a helicopter crash.
The two processes are tested using the same plat-
form and they can be selected by using a switch, see
Figure 4.
Both processes are helicopters and the goal is to
stabilize the attitude dynamics for each one. There-
fore, the classical attitude mathematical model is
given by (Castillo et al., 2005)
¨
η = τ
η
∀ η = ψ, θ, φ (1)
where η represents the Euler angles and τ
η
the control
input.
1
Under the POSIX standard design guides there are a lot
of good products, several Unix versions are among the most
successful ones. The ARINC specification was designed to
be used by high-reliable products and is used in avionics
applications.
DevelopingEmbeddedControlSystemswithXtratuM-ApplicationtoControltheAttitudeofaMini-helicopter
437
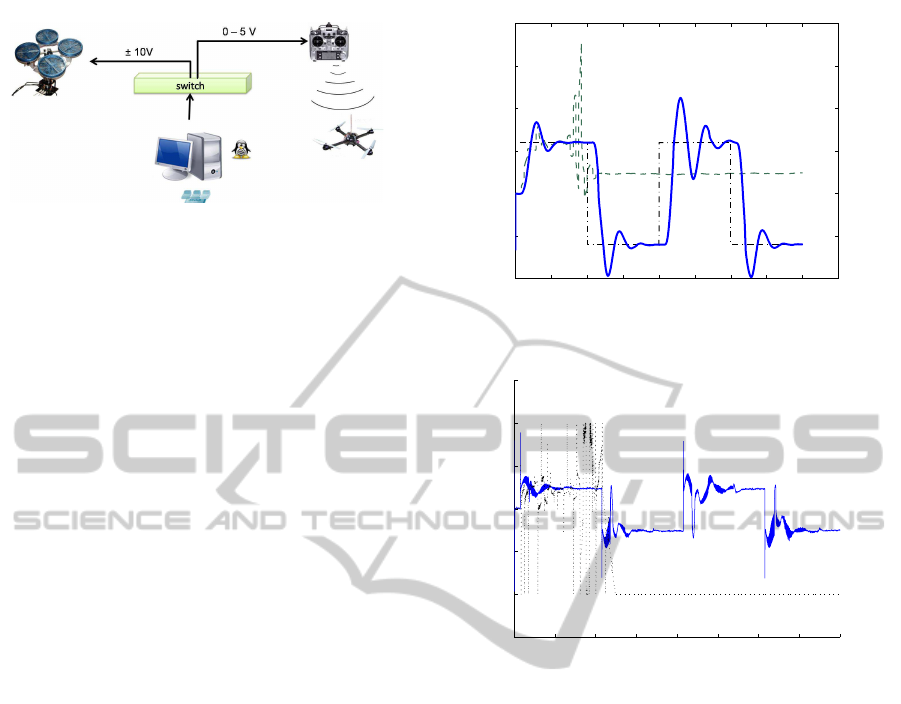
Figure 4: Platform & process schema.
3.1 Application to the Quanser
Helicopter
In this section, the proposed platform is tested
stabilizing the roll angle (φ) of a mini helicopter
with four rotors mounted in a vertical base (see more
characteristic of the helicopter in (Quanser, 2007)).
The helicopter is a modified Quanser helicopter
connected with the processor using the input/output
cards. Moreover, the helicopter can be only con-
trolled in attitude. An IMU (MicroStrain, 2007)) is
used to measure the orientation (ψ, θ, φ) and the angu-
lar rate (
˙
ψ,
˙
θ,
˙
φ) of the vehicle. The IMU is connected
via an USB port. In addition, the system receives
commands from a small keyboard and will send, peri-
odically, the system status to a host computer in order
to display and analyze the system variables and status.
The following controller, based on saturation
functions, is used to stabilize the roll angle of the he-
licopter
τ
φ
= −σ
φ
1
k
d
˙
φ
− σ
φ
2
k
p
(φ− φ
d
)
(2)
The stability analysis of the closed-loop system is
given in (Sanahuja et al., 2010).
The behavior of the platform described in section
2 is compared with respect to a platform only based
on the Linux RT system. The control objective is that
the helicopter should follow a step trajectory. Once
this task is completed, more tasks are added to the
processor in order to saturate its capacity and ver-
ify the system’s robustness. Figure 5 shows the φ
response when applying the previous control law in
Linux RT system. Solid line represents the almost
perfect system response without others tasks execut-
ing, while the dotted line represents the same response
when others tasks need to be executed (stress condi-
tions). Note from this figure that, when executing the
control algorithm at the same time with others tasks,
and increasing the load, the system becomes unstable
for some given load. The control inputs generated in
these experiments are shown in Figure 6.
The φ behavior when the proposed platform (Xtra-
tuM + PartiKle system) is used by applying the con-
0 1000 2000 3000 4000 5000 6000 7000 8000 9000
−10
−5
0
5
10
15
20
Time(seg)
φ(º)
Figure 5: φ Angle response.
0 1000 2000 3000 4000 5000 6000 7000 8000
−15
−10
−5
0
5
10
15
Time (s)
τ
φ
(V)
Figure 6: τ
φ
Control input.
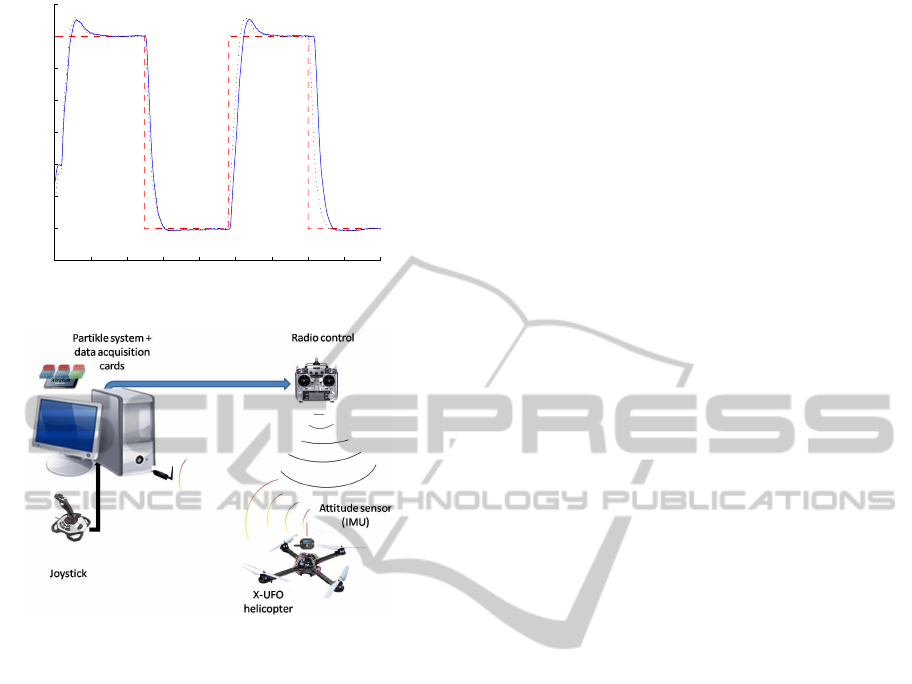
trol law (2) to stabilize the roll angle, is shown in Fig-
ure 7. This experiment is also done concurrently with
(or without) others tasks. The solid line represents the
system response without others tasks while the dotted
line represents the same response with others tasks
executing at the same time. Note from this figure that
the system remains stable in both cases and, there-
fore, these experiments illustrate the robustness of the
platform.
3.2 Application to the XUFO
The XUFO platform is more complete and it is
composed by a processor, an IMU, a radio, a heli-
copter and a joystick, see Figure 8. The employed
helicopter is a mini-helicopter with four rotors
from X-UFO company (Xufo, 2002)). It is a well
known helicopter used in some control aeronautical
applications. The main characteristics are that the
front and the rear motors rotate clockwise while the
other two rotate counter clockwise, the gyroscopic
phenomena are relatively small. This helicopter does
not have a swatch plate. In fact it does not need any
servomechanism. The main thrust is the sum of the
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
438
0 500 1000 1500 2000 2500 3000 3500 4000 4500
−8
−6
−4
−2
0
2
4
6
8
Time (s)
φ (°)
Figure 7: φ Angle response.
Figure 8: Control platform schema.
thrusts of each motor. Pitch movement is obtained by
increasing/reducing the speed of the rear motor while
reducing/increasing the speed of the front motor.
The roll movement is obtained similarly using the
lateral motors. The yaw movement is obtained by
increasing/decreasing the speed of the front and rear
motors while decreasing/increasing the speed of the
lateral motors. This should be done while keeping the
total thrust constant. The helicopter evolves freely in
a 3D space without any flying stand.
The radio is a Futaba Skysport 6. The radio and
the PC are connected using data acquisition cards.
The connection in the radio is directly made to the
joystick potentiometers for the trust, yaw, pitch and
roll controls. To measure the orientation and the an-
gular rate of the vehicle, a wireless IMU (Micros-
train, (MicroStrain, 2007)) is used. The IMU sends
this information via wireless to a receiver located in
the ground station (processor). Moreover, the com-
puted control inputs are sent to the rotors via a dig-
ital/analogic converter. Additionally, the system can
receive commands from the keyboard and send, peri-
odically, the system status to a host computer in order
to display and analyze the system variables.
Experimental Results
Several experiments have been done. To illustrate the
results, the following control is applied in order to sta-
bilize the yaw angle under aggressive disturbances.
The following nonlinear control law based on satura-
tion functions has been used to control the system (1),
τ
η
= −σ
η
a
(k
η
1
˙
η) − σ
η
b
(k
η
2
(η− η
d
)) ∀ η = ψ, θ, φ
(3)
where |σ
η
i
(◦)| ≤ η
i
, ∀ i = a, b, is a saturation func-
tion, a, b > 0 are constant and k
η
j
> 0, ∀ j = 1, 2, are
constant. Introducing (3) into (1), we obtain
¨
η = −σ
η
a
(k
η
1
˙
η) − σ
η
b
(k
η
2
(η− η
d
)) (4)
The stability analysis of the system (4) was also pre-
sented in (Sanahuja et al., 2009). The main character-
istic of this control strategy is that when the system is
working in the linear part of the saturation function it
can be seen as a linear controller.
Yaw Stabilization. The idea here, is to apply the
control law in open-loop and closed-loop in order to
analyze the performance of the platform. Addition-
ally, some manual aggressive perturbations and a de-
sired trajectory are added on-line to validate the ro-
bustness of the system.
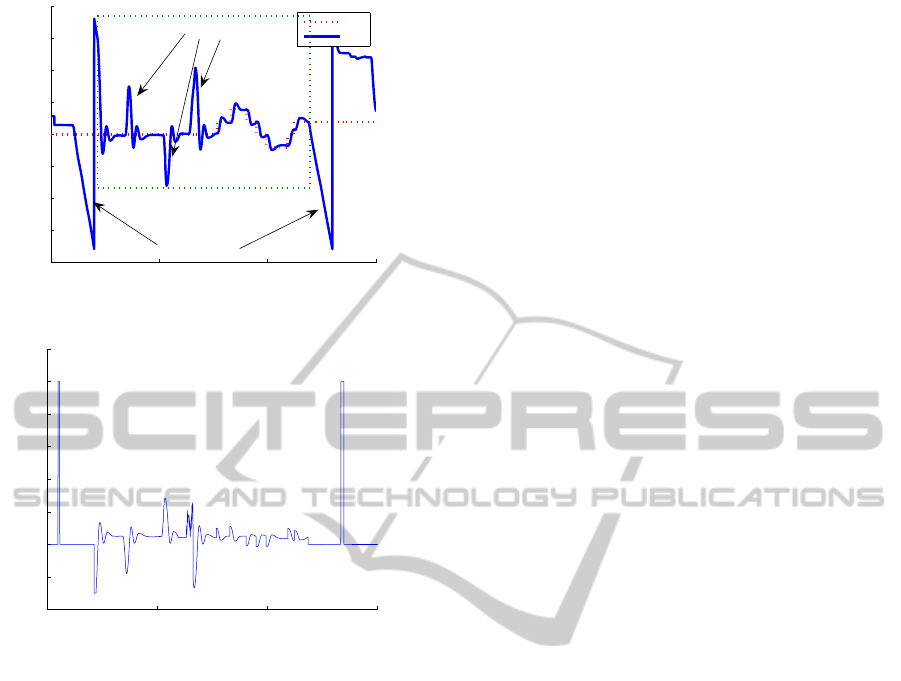
The performance of the controller used to stabi-
lize the yaw angle of a helicopter is shown in Fig-
ure 9. Some forces have been manually (or using
the joystick) added to perturb the system. Note that,
the closed-loop system remains stable in the presence
of aggressive perturbations. To improve the perfor-
mance of the experiments the controller parameters
have been tuned on line. On the other hand, a stress
condition is given to the processor, executing a video
at the same time, in order to perturb the process. In
pure Linux environmentsthe use or execution of other
applications could “stop” the process, and notice that
it is not the case for the developed platform. Figure
10 shows the control input applied to the system.
4 PARTITIONED APPROACH
ANALYSIS
When comparing a partitioned approach with respect
to a more classical approach, the following advan-
tages based on the temporal and spatial isolation to
partitions provided by the hypervisor can be men-
tioned:
• Separation of concerns: Each partition can use the
most approriated operating system. In this case,
DevelopingEmbeddedControlSystemswithXtratuM-ApplicationtoControltheAttitudeofaMini-helicopter
439
0 5000 10000 15000
−200
−150
−100
−50
0
50
100
150
200
Time (s)
ψ (°)
Ref.
yaw
Perturbations
closed−loop system
Open loop system
Figure 9: ψ Angle response.
0 5000 10000 15000
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
1.2
Time (s)
τ
ψ
(V)
Figure 10: τ
ψ
Control input.
real-time tasks require a small real-time system.
On the other hand, the set of activities related with
graphical interface, network communications, re-
mote access, etc., may require a fulloperating sys-
tem as Linux. It allows the integration of real-time
with non real-time activities in the same platform.
• Several levels of criticality: each partition may
have different real-time constraints and, conse-
quently, different level of validation, security, etc.
• Independent development: partitions can be inde-
pendently developed and validated. Very well de-
fined mechanisms to communicate partitions are
provided by the hypervisor.
• Faults are limited to the faulting partition: parti-
tioning approach allows to have independent par-
titions that are not affected by the faults in other
partitions. The hypervisor grants that a fault in
a partition is not propagated to other partitions.
In this case, the real-time partition defines a lim-
ited set of tasks that can be fully validated jointly
with the real-time operating system using the ap-
propriated techniques to achieve a secure parti-
tion. On the Linux partition, it is more complex
(and costly) to fully validate the interfaces, com-
munications, etc. If a fault occurs in the Linux
partition, the hypervisor confines the fault to that
partition without impacting the execution of other
partitions.
• External attacks: if the Linux partitions permit the
external access to the application services, some
external attacks may happen. Even if a hacker
gets the Linux partition control, the spatial par-
tition isolation grants that no access to other par-
titions is allowed.
However, some drawbacks can be also consider-
ated:
• More complex software architecture: the software
architecture is more complex due to the existence
of a hypervisor and several guest OS for the parti-
tions.
• Scheduling: a cyclic scheduling has to be de-
signed to fulfil the temporal requirements of the
real-time partitions.
• System deployment: the final system to be de-
ployed in the embedded hardware platform has to
include the hypervisor and the partitions.
5 CONCLUSIONS
A new test-bed platform has been presented in order
to validate and improve the design of embedded con-
trol systems. To run different tasks in an independent
way, providing maximum operation safety, a hipervi-
sor (XtratuM) has been used at the lower level.
Linux RT and Partikle like O.S. have been used in
order to implement the control strategies and to guar-
antee priority tasks.
The proposed platform has been used for validat-
ing the ECS designed for a quadrotor and a lab heli-
copter. It has been proved to be robust under different
load conditions.
The platform is versatile and allows the use of dif-
ferent OSs as well as control algorithms, with the op-
tion to experiment with changes in the control laws,
control parameters and operating conditions.
Once the control structure is validated, it can be
deployed and implemented in the final system.
REFERENCES
AUTOSAR. Internet Automotive open System Arquitecture.
Berna, A., Castillo, P., Sanahuja, G., Gonz´alez, F., Garcıa,
P., and Albertos, P. (2011). Development of a test-bed
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
440

to implement and validate real-time control strategies
for aerial vehicles. In Proceedings of the 18th IFAC
World Congress.
Castillo, P., Lozano, R., and Dzul, A. E. (2005). Modelling
and control of mini-flying machines. Springer.
Commision, E. (2012). Workshop on mixed criticality sys-
tems. http://cordis.europa.eu/fp7/ict/computing/home
en.html.
Crespo, A. and Alonso, A. (2006). Una panor´amica de los
sistemas de tiempo real. Revista Iberoamericana de
Autom´atica e Inform´atica Industrial (RIAI), 3(2):7–
18.
J. Loyall, R. Schantz, D. C. and Fernandez., S. A dis-
tributed real-time embedded application for surveil-
lance, detection, and tracking of time critical targets.
11th IEEE Real-Time Embedded Technology and Ap-
plications Symposium,11th IEEE Real-Time Embed-
ded Technology and Applications Symposium, 2005.
Kopetz, H. (2011). Real-time systems: design principles
for distributed embedded applications, volume 25.
Springer.
M. H. Deredempt, A. Crespo et al. (2012). Integrated
modular avionics for spacecraft software architecture
and requirements. In DASIA 2012. DAta Systems In
Aerospace.
Masmano, M., Ripoll, I., and Crespo, A. (2005). An
overview of the xtratum nanokernel. In Proceedings
of the Workshop on Operating Systems Platforms for
Embedded Real-Time Applications (OSPERT).
Masmano, M., Ripoll, I., Crespo, A., Metge, J., and Ar-
beret, P. (2009). Xtratum: An open source hypervisor
for TSP embedded systems in aerospace. In DASIA
2009. DAta Systems In Aerospace.
MicroStrain (2007). 3DM-GX2TM Data Communication
Protocol, technical report version 1.13 edition.
Parkinson, P. and Kinnan, L. (2003). Safety-critical soft-
ware development for integrated modular avionics.
Embedded System Engineering, 11(7):40–41.
Peiro, S., Masmano, M., Ripoll, I., and Crespo, A. (2007).
Partikle os, a replacement for the core of rtlinux-gpl.
In Proceedings of the 9th Real-Time Linux Workshop,
Linz, Austria, page 6.
Rushby, J. (1999). Partitioning in avionics architectures:
Requirements, mechanisms, and assurance.
Sanahuja, G., Castillo, P., and Sanchez, A. (2009). Stabi-
lization of n integrators in cascade with bounded input
with experimental application to a VTOL laboratory
system. International Journal of Robust and Nonlin-
ear Control. DOI: 10.1002/rnc.1494.
Sanahuja, G., Castillo, P., and Sanchez, A. (2010). Stabi-
lization of n integrators in cascade with bounded input
with experimental application to a vtol laboratory sys-
tem. International Journal of Robust and Nonlinear
Control, 20(10):1129–1139.
Shin, K. G. and Cui, X. (1995). Computing time delay
and its effects on real-time control systems. Control
Systems Technology, IEEE Transactions on, 3(2):218–
224.
Stothert, A. and MacLeod, I. (1998). Effect of timing jitter
on distributed computer control system performance.
In Proceedings of 15th IFAC Workshop DCCS, pages
25–30.
Quanser, I. (2007). “http://www.quanser.com/”.
Xufo, I. (2002). “http://www.xufo-shop.de”.
www.opensource.org/docs/definition.php. Open source ini-
tiative, open source definition. published online in
open source initiative’s official web site. December
20095.
DevelopingEmbeddedControlSystemswithXtratuM-ApplicationtoControltheAttitudeofaMini-helicopter
441
