
Humanoids Meet Rehabilitation
Concept and Potential
Diego Torricelli and Jose L. Pons
Group of Bioengineering (GBIO), Spanish National Research Council (CSIC), Madrid, Spain
Keywords: Neurorehabilitation, Neurorobotics, Neuroscience, Motor Control.
Abstract: The development of humanoids is receiving attention in the bioengineering and health care communities,
due to the high potential of bio-inspired robotics to serve as test bed of motor control theories. To this aim,
Neurorobotics is gaining relevance as a way to translate the biological principles into “intelligent”
machines. The result of this process is twofold: i) validating the biomechanical and neural control principles
found in humans, and ii) developing more effective rehabilitation devices and strategies. In this paper, some
of the main challenges of this process will be presented, with particular emphasis on the implications in
diagnostic and rehabilitation of walking. As a first step in this direction, the European project H
2
R aims at
developing a humanoid that includes the most relevant biological principles of human locomotion and
posture. This new neurorobot is expected to result in a versatile test bed of future neurorehabilitation
solutions.
1 INTRODUCTION
In this paper we will present Neurorobotics, as an
emerging discipline used to transfer neuroscientific
principles to practical robotic devices. Before
introducing Neurorobotics, we will be focusing
preliminary on the term “robot”. The definitions of
robots that can be found in the literature are
controversial, and at the same time they share
similar and interesting features. A robot can be
defined as “any automatically operated machine that
replaces human effort, though it may not resemble
human beings in appearance or functions”
(Encyclopaedia Britannica online). The Merriam-
Webster Dictionary gives a threefold definition of a
robot: i) A machine that looks like a human being
and performs various complex acts of a human
being, ii) A device that automatically performs
complicated often repetitive tasks, and iii) A
mechanism guided by automatic controls (Merriam-
Webster online).
In summary, even if it is not completely clear
which distinctive features a robot should have, two
key aspects can be identified. On the one hand a
robot has to resemble human properties, namely
appearance and/or functions. On the other hand it
should perform actions in an automatically and
repetitive way. These two features are at the same
time different and strictly interconnected to each
other. In fact, one of the primary goals of
intelligence is to prevent actions to be completely
automatic and repetitive, allowing adaptation to an
ever-changing environment. At the same time, a
repetitive and automatic behaviour is key for highly
efficient movements (e.g. central pattern generators
In walking). In other words, we could say that purely
automatic and repetitive functions are turned into
biological-like behaviours by means of intelligence.
Unrespect to the specific functional goal of a
robot, the ultimate goal of robotics is to include
more and more intelligent features into the automatic
control of the machines. In this respect, an
intelligent process can be characterized by four main
areas: i) interaction with external environment
(physical and cognitive), ii) data perception and
absorption, iii) response to various stimuli, and iv)
decision making (Neisser et al., 1998).
In rehabilitation, and more specifically in
neurorehabilitation, the use of robotics has increased
significantly over the last decade. Nowadays,
complex robotic machines for re-training the upper
and lower limbs after neurological impairments are
commercially available and included in the clinical
practice. Nevertheless, no clear evidence of
improvements with respect to traditional manual
therapy has been demonstrated so far (Lo et al,
213
Torricelli D. and Pons J..
Humanoids Meet Rehabilitation - Concept and Potential.
DOI: 10.5220/0004645102130217
In Proceedings of the International Congress on Neurotechnology, Electronics and Informatics (RoboAssist-2013), pages 213-217
ISBN: 978-989-8565-80-8
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)
2010). The only clear advantage of robotic therapy is
related to the possibility of improving the intensity
of the session in time and repetitions, normally
limited in manual-based sessions. The reason for the
low robotic performance is still under debate. One of
the possible factors is related to the poor physical
and cognitive adaptability to the subject (Pons,
2008).
The ideal rehabilitation machine – similarly to
what a human therapist normally does – should
assist the patients only if needed, in order to ensure
the completion of the task as much as possible while
maximizing the active participation of the patient.
Recalling the four basic features of an intelligent
process previously mentioned, the ideal robot
should: i) optimize the physical and cognitive
interaction with the user, ii) perceive and analyse the
subject status, iii) appropriately respond to the
events that may occur, and iv) making the right
choices when different strategies are envisioned.
Unfortunately, the currently available robots are still
made of rigid structures with automatic trajectory-
based control, which permit very low adaptation and
almost no decisional strategy implementation.
In order to fill the gap between rigidity and
adaptability, i.e. between purely automatic and
intelligent behaviours, some new solutions are
arising in research. Among these, we found the
approach based on Neurorobotics of particular
interest.
2 NEUROROBOTICS
Neurorobotics can be defined as the discipline that
combines Neuroscience, Robotics, and Artificial
Intelligence in order to embody neural principles
into physical robots. Robotics and Neurorobotics are
similar, but present some crucial differences. The
turning point is how to look at functionality. In
Robotics, functionality is the primary goal, from the
design to the testing phases. Instead, Neurorobotics
focuses on the biological principles embedded in the
machine, which should resemble those found in
nature. Functionality, from the point of view of
Neurorobotics, is considered a way of testing the
biological principles implemented. The basic
hypothesis behind this approach is that an intelligent
functionality will emerge naturally from the correct
implementation of an intelligent principle.
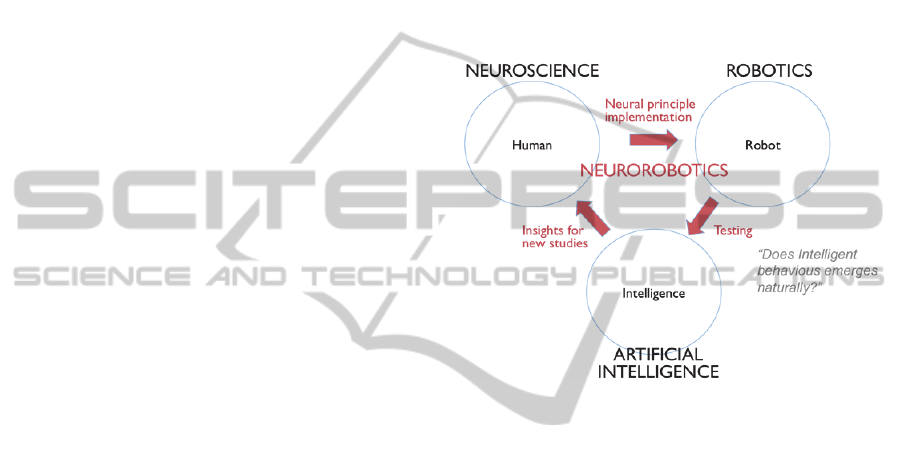
To formalize and schematize this approach, a
closed-loop process can be identified, as depicted in
Figure 1. As a first step in this process,
neuroscientific evidences on neural mechanisms are
identified and translated into robotic control
algorithms. In a second step, the emergence of an
intelligent behavior of the machine, i.e. a human-like
or biological-like functionality, is tested and
compared with the real biological behavior. At last,
results are analysed, and the degree of “intelligence”
of the behaviour is assessed. A final discussion on
the validity of the neurophysiological hypothesis and
its correct implementation is prone to generate new
scientific questions and new experiments, from
which a new loop can be initiated.
Figure 1: Neurorobotics is a closed-loop process that starts
and ends in neuroscience, passing through robotic
implementation and testing of intelligent behavior.
The advantage of this approach is threefold.
First, it constitutes a controllable testbed for
neurophysiologic principles. Secondly, using a robot
as testing environment, introduces simplifications
that permit to isolate the biological mechanism
object of study from all the possible sources of
external and not relevant disturbances (Rucci, 2007).
Third, a robot is accessible all time, differently from
what happens in human or animal experiments.
In conclusion, Neurorobotics can improve the
range of tests and experiments that can be performed
in the study of neural processes.
3 POTENTIAL FOR
REHABILITATION
According to (Chiel, 1997), the brain, the body and
the environment cannot be considered separately.
The brain is embedded in the body, and the body in
the environment. According to this holistic view of
the motor control system, adaptive behaviours
emerge from the close interaction of these three
NEUROTECHNIX2013-InternationalCongressonNeurotechnology,ElectronicsandInformatics
214

elements (Figure 2). This hypothesis has two logic
consequences. The first is that interaction is a crucial
part of the system. The second is that the whole
system is much more that the sum of its parts.
As applied to Neurorobotics, these concepts have
important practical implications. The first one is that
neurorobots should be real structures that interact
with real environment. Use of simulation, in this
context, should be limited only to the first stages of
robot design. In fact, the interaction between real
structures (e.g. contact with the ground during
walking) embeds physical phenomena that are yet to
be accurately represented in simulation. Another
important implication is that even very complex
behaviours can be potentially studied using a few
simple elements in interactions to each other
(Giszter, 2001).
Figure 2: Holistic view of the biological motor control
system and the fundamental role of the interactions in the
generation of behaviours.
How can the principles of Neurorobotics be used
to develop more effective rehabilitation and
neurorehabilitation machines? Let’s consider the
case of rehabilitation of locomotion.
As opposed to a classical rehabilitation
engineering approach, which aims at solving the
problem in functional terms (e.g. by developing a
neuroprosthesis that allows restoring gait), the
neurorobotics approach is strongly based on
preliminary observation of the mechanisms that
emerge in a neurorobot. These mechansims are the
result of the interaction between the three main
elements resembling those of humans, i.e. the
control system (brain), the plant (body) and the
environment (Figure 3). The key point is that some
of these interactions may have not been modelled
previously, but emerge naturally from the correct
implementation of neural control into the
biomechanical structures. The effects of them can be
studied in deep detail at different levels, because
robotic structures offer many advantages for
experimental observation with respect to human
subjects.
Practically, this process includes two main
actions. The first is to create a neurorobot that
embeds the main known physiological principles of
human locomotion. The second is to extract, from
the analysis of the behaviour of the robot, clues that
can be turned into design principles for rehabilitation
machines.
As for the first action, i.e. the development of the
neurorobot, the following main steps should be
followed:
1. The basic biomechanical and neural principles of
human locomotion are first translated to a
human-like neurorobot, represented by a
humanoid (or part of it).
2. The functionality of walking is then tested and
mechanisms refined in an iterative fashion, in
order to obtain intelligent behaviour, i.e. human-
like walking.
3. Once stable and human-like walking is achieved,
the different levels of interaction of the
neurorobot (brain-body interaction, body-
environment interaction) are analysed.
4. These interaction mechanisms are then
formalized in order to understand the cause-
effect relation between internal control and
functional behaviour.
As for the second action, i.e. transferring the
acquired knowledge to the rehabilitation scenario,
different approaches can be envisioned. The
neurorobot can be include either mechanisms of a
healthy subject, or can be modified to match a
specific known motor disability.
In the “healthy neurorobot” scenario, once the
neurorobot is developed, the principles of actuation
implemented in the machine are prone to be
transferred to rehabilitation machines. For instance,
feed-forward control strategies implemented in the
robot can be used to implement biologically based
neuro-prosthetic control algorithms. In a similar
fashion, local reflex-based robotic principles, which
describe the reaction of the robot joint to the
interaction with the environment, may be translated
into control algorithms for lower limb prostheses.
In the “pathologic robot” scenario the efforts are
devoted at reproducing a specific impaired
behaviour, by modifying internal control or
biomechanical parameters of the robot. In this case,
different rehabilitation potentialities can be
identified. If the pathologic behaviour is successfully
reproduced, the cause-effects relation between the
affected biological principle and the functional
HumanoidsMeetRehabilitation-ConceptandPotential
215
performance can be estimated on a quantitative
basis. This information can be thus converted into
quantitative metrics to be used to infer the
neural/biomechanical causes of a pathological
function in patients.
The “healthy robot” and “pathologic robot”
scenarios may be used either separately, as above
described, or interactively. In the interactive
approach, a healthy neurorobot can be used to
compensate its pathologic counterpart. The
compensative robot may be constituted by a real part
(or subpart) of a healthy neurorobot, or by a sort of
neural substitute (e.g. control systems representing
neural prosthesis). The combined systems
(pathological robot + compensative robot) are then
iteratively assessed and adjusted in order to
maximize the compensative action, similar to what
is done during a robotic-based therapeutic process.
The expected outcome of this interactive approach is
to produce clues for the design and development of
orthotics or exoskeletal devices.
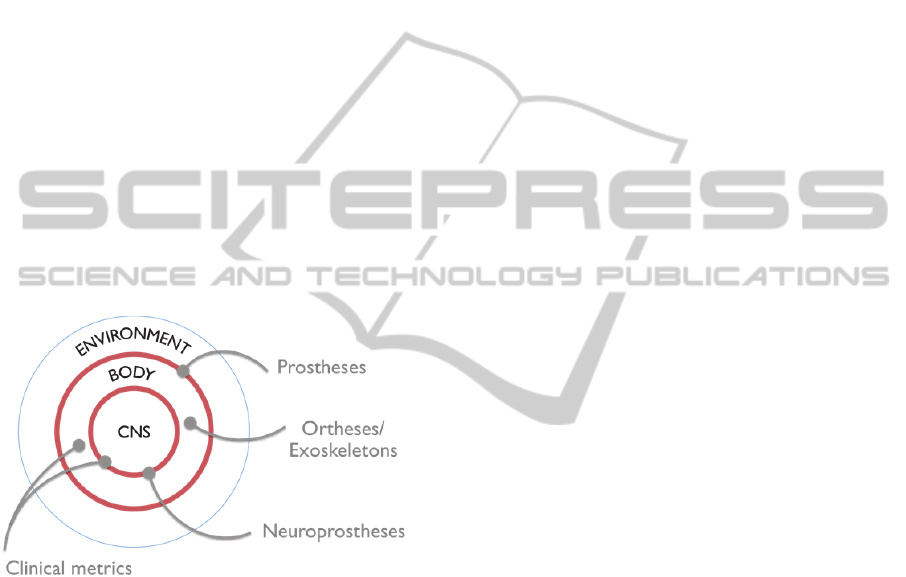
All these levels of possible applications are
reflected in Figure 3.
Figure 3: Interactions between elemental parts of a
neurorobot are taken as inspiration for the development of
rehabilitation devices.
From a technological point of view, the
neurorobotic approach has two main advantages and
one drwabacks. The first advantage is that most of
the developmental phase does not involve
experiments on patients. The second one is that a
neurorobot not only is a tool for neuroscientific
study, but also embodies technical solutions that
may be directly transferred “as is” to the
rehabilitative machine.
The main drawback is that this approach requires
the availability of a real-life robot. Depending on
biological principle considered, the process of
design and development of a neurorobot can be very
complex, time-consuming and costly.
In line with this last issue, the recently started
European project H
2
R “Integrated approach for the
emergence of human-like locomotion” aims to
develop a human-like neurorobot including the most
relevant biological principles of walking and
standing. If successful, this neurorobot can serve as
testbed of the design procedures of innovative
rehabilitative devices, as well as new clinical
assessment methods, following the process above
described.
4 THE H
2
R PROJECT
The goal of H
2
R project is to demonstrate that
human-like gait and posture can emerge in a bipedal
robot as a result of a combination of the most
relevant biomechanical, neuromotor and cognitive
mechanisms found in humans.
In order to achieve this goal, a threefold process
will be adopted:
1. Understanding the key biological principles from
human experiments.
2. Translating the formalized concepts into human-
like bipedal robot.
3. Creating new benchmarking schemes for
validating the robotic performance.
Regarding the first goal, three main biological
principles will be object of investigation:
- The hypotheses of modular neuromuscular
control of human movement, based on muscle
synergies. This is a crucial step to understand
how humans solve the problem of redundancy in
the musculoskeletal system.
- The context-dependent sensor fusion process.
Understanding the cognitive ability of predicting
and estimating the typology of disturbances is
one of the key points of human stability.
- The compliant principles of human joints and
muscles. This aspect in strongly related to energy
efficiency, computational burden, and natural
looking motion.
Concerning the robotic development, the goal of
H
2
R project is to permit the inclusion in a real-life
structure of the human-like neuromotor and
biomechanical principles identified previously. For
this reason, the neurorobot will present compliant
elements in most of its degrees of freedom, and a
neural-based hierarchical control architecture which
permits the integration of feed-forward and feedback
control strategies. The robot is expected to have
human-like performance in terms of efficiency,
stability and versatility.
NEUROTECHNIX2013-InternationalCongressonNeurotechnology,ElectronicsandInformatics
216

The third goal of the project is to formalize a
benchmarking scheme that can be used to assess and
compare human-like skills of robotic humanoids.
We are particularly interested in testing:
- Stability during gait and posture, both in sagittal
and frontal planes, during voluntary and
perturbed conditions;
- Energy consumption during walking;
- Cognitive ability in predicting and anticipating
disturbances, such as self-induced perturbations
or unforeseen changes in the environment.
The threefold process described represents an
example of the general neurorobotic process shown
in Figure 1 for the case of human walking and
standing. Once this process will be completed, the
resulting neurorobot will be potentially made
available for the design and development of new
rehabilitative solutions as the ones depicted in
Figure 3.
5 CONCLUSIONS
We presented the discipline of Neurorobotics as a
promising approach to integrate Neuroscience,
Artificial Intelligence and Robotics, to the aim of
providing new tools for the study of motor control
mechanisms and at the same time providing more
intelligent solutions for rehabilitation.
The potential of the approach, based on the use
on bio-inspired machines as test bed for
neuroscientific studies, is twofold. On the one hand
it permits generate evidences that may be difficult to
achieve with direct experimentation on human
subjects. On the other hand, the study of the
interactions at different levels of a neurorobot can
constitute a technological bridge between human
needs and rehabilitation solutions.
As a first effort in this direction, we presented
the European project H
2
R, which aims at developing
a neurorobot that includes the main biological
principles of human locomotion and posture.
ACKNOWLEDGEMENTS
The ideas and concepts described in this paper result
from the research activities of the project H
2
R
“Integrative Approach for the Emergence of Human-
like Robot Locomotion”, Call FP7-ICT-2011-9. (ID:
60069).
REFERENCES
Encyclopaedia Britannica online, www.britannica.com /
EBchecked / topic / 505818 / robot.
Merriam-Websteronline, www.merriam-webster.com /
dictionary / robot.
Neisser, U., Boodoo, G., Bouchard Jr, T. J.; Boykin, A.
W., Brody, N., Ceci, S. J., Halpern, D. F., Loehlin, J.
C., Perloff, R., Sternberg, R. J., Others, (1998).
"Intelligence: Knowns and Unknowns". Annual
Progress in Child Psychiatry and Child Development
1997.
Albert C. Lo et al., Robot-Assisted Therapy for Long-
Term Upper-Limb Impairment after Stroke. N Engl J
Med 2010; 362:1772-1783.
Pons, J. L. (Ed.). (2008). Wearable robots: biomechatronic
exoskeletons.
Rucci, M., Bullock, D., & Santini, F. (2007). Integrating
robotics and neuroscience: brains for robots, bodies for
brains. [Article]. Advanced Robotics, 21(10), 1115-
1129.
Chiel, H. J., & Beer, R. D. (1997). The brain has a body:
adaptive behavior emerges from interactions of
nervous system, body and environment. Trends in
Neurosciences, 20(12), 553-557.
Giszter, S. F., Moxon, K. A., Rybak, I. A., & Chapin, J. K.
(2001). Neurobiological and neurorobotic approaches
to control architectures for a humanoid motor system.
Robotics and Autonomous Systems, 37(2-3), 219-235.
H2R project website, www.h2rproject.eu.
HumanoidsMeetRehabilitation-ConceptandPotential
217
