
Cognition Capabilities and the Capability-affordance Model
Vaughan Michell
Informatics Research Centre, Henley Business School, University of Reading, Whiteknights, Reading, RG6 6UD, U.K.
v.a.michell@ henley.reading.ac.uk
Keywords: Cognitive Informatics, Distributed Cognition Theory, Capability-affordance Model, Affordance
Mechanism, Affordance Path.
Abstract: Much research has been done on physical and cognitive affordances in designed objects, but little has been
done on human cognitive capabilities. This paper applies the capability-affordance model to cognitive agent
capabilities and affordances. It develops a cognition-affordance model by identifying cognition resources
using the SRK model and cognitive task analysis. It proposes four cognition mechanisms and suggests
cognitive capability depends on cognitive mechanisms interacting with knowledge. Affordance possibilities
depend on different knowledge paths where existing or new agent knowledge is applied/grown by copying
or mutation. Mutation may use existing logic creating new knowledge directly applicable to the real world,
or, new theoretical knowledge affordances of imagination. We propose a two axis model to link cognitive
affordance and imagination. We propose how perceived and cognitive affordances relate to the perception-
action axis and that epistemic-axiological axis relates to the theoretical models of thought to account for
creativity in human-agent cognition.
1 INTRODUCTION
Our work focuses on the capability of the object in
the environment in terms of people and natural and
human designed objects/systems ie ‘what could the
object do?’ and ‘how do we measure what it could
do? The term ‘cognitive affordance’ defined by
Norman et al., (1988) is widely used to explain
combinations of object uses in relation to what is
perceived in the environment. Cognitive affordance
theory is often used to design human computer
interfaces (Hartson, 2003) and in ecological design
of systems. However, firstly it does not explain the
interactions of internal human resources that provide
the cognitive capability (Norman, 1988). Perceived
affordance depends on representations in long term
memory and the way the agent brain processes these.
Secondly Norman’s approach can confuse the
perception of how objects and features of objects in
the real world could be used by the agent, with our
focus, the way knowledge can be used in the brain in
terms of the affordance of reasoning and creativity
to produce new ideas and thoughts (Albrechtsen,
2001). We therefore use the term cognition
affordance to explain the possible interactions of
mental resources that produce creative thought
possibilities.
1.1 The Capability-affordance Model
Our previous papers introduced the idea of the
capability resource model (Michell, 2011) and
capability-affordance model using the work of
Gibson and Norman. We reasoned that the capability
of two interacting resources Ri was dependent on an
affordance mechanism AM and the possible 4d
space-time path AP to execute the affordance
(Michell, 2013).
Capability = f(AM(Ri) x AP(Ri)) and R = f {Aij}
This was used to explain physical resource
combinations or directly perceivable affordances
acting in 3 dimensions plus time (Barentsen and
Trettvik, 2002). However, we paid little attention to
the way knowledge can be used in the brain to
explain cognition affordance. We used Stamper et al.
(2000) to differentiate between two types of
behaviour substantive (or physical action) eg a
doctor injecting a patient and semiological action of
the doctor making sense of signs using his
knowledge and cognition to diagnose the patient.
1.2 Definitions
Further details and explanations can be found in
(Michell, 2013).
86
Michell V.
Cognition Capabilities and the Capability-affordance Model.
DOI: 10.5220/0004774300860095
In Proceedings of the Third International Symposium on Business Modeling and Software Design (BMSD 2013), pages 86-95
ISBN: 978-989-8565-56-3
Copyright
c
2013 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Table 1: Definitions.
1.3 Objectives
In this paper we explore how the capability-
affordance model can be used to describe cognition
and semiological actions with five objectives:
a) To set out the reasoning for semiological
affordances and their relationship to cognitive
affordances
b) To develop a model of semiological affordances
and their relationship to existing work
c) To identify semiological mechanisms
d) To identify semiological paths
e) To account for creativity.
Section 2 explores the definition of cognitive
affordance and its role in semiological resource
interaction and defines cognitive capability as an
interaction of agent cognitive and knowledge
resources. Section 3 reviews cognitive resources
using human cognitive behaviour. Section 4 reviews
agent knowledge resources based on cognitive
architecture research and identifies cognitive
mechanisms based on semiotics models. Section 5
proposes an integrated cognition model. Section 6
discusses the implications of the model and Section
7 and 8 concludes and identifies future work.
2 SEMIOLOGICAL CAPABILITY
As mentioned before, this section considers
cognitive affordance and its role in semiological
resource interaction, and defines cognitive
capability.
2.1 Cognitive vs Semiological
An action (a) is a transformation of resources
(Michell, 2011). A semiological action uses signs
perceived by the agent from the environment to
process possible actions (Stamper et al., 2000)
Semiological action depends on information and
knowledge from sensors and cognitive actions in the
mind of the agent. The interaction between the
cognitive mechanisms of the brain and knowledge
create possible ideas for action – cognition
capabilities Ccog. Using the capability affordance
model the cognitive affordance mechanism relates to
the interaction of cognitive resources (Boy, 1998),
one of which must be an agent’s mind and its
cognitive mechanisms Rcog. The second represents
tangible or intangible resources ie data, information
and Knowledge: Rk, obtained from the environment
as only this is able to interact mentally in an
affordance pair in the agent.
Ccog = f(agent cognitive mechanism x data,
information, knowledge interaction) = f(Rcog x Rk)
To understand these affordances we need to
understand theories of cognitive brain function.
However, while the interaction mechanism of non-
human objects is well understood, the mechanism of
the brain is not.
2.2 Distributed Cognition Theory
Distributed cognition theory provides a framework
for cognition spaces based on cognitive psychology
(Zhang and Patel, 2006). We extend Zhang’s model
using a physical internal space Sp and a cognitive
space Sc. Sp comprises the biochemistry and
physiology resources of the body (B) ie the
mechanism of biochemical reactions and the
physical structures such as bone and flesh,
synapses., muscle (P) that provide the path for the
animal to work and select physical affordances. The
cognitive space Sc comprises the mechanisms of
perception and cognition (C) and the data
information and knowledge (K) and relates to
semiological affordances. The External space
represents the environment and the natural and
manmade (technology) structures (S) than provide
physical and cognitive affordance possibilities as a
result of agent sensor information (I) and actuators
such as hands.
We now identify the agent cognition and
knowledge resources and the mechanisms AMcog
(C ) and affordance paths APcog relating to data,
information and knowledge (K) that enable
semiological capability.
Cognition Capabilities and the Capability-affordance Model
87
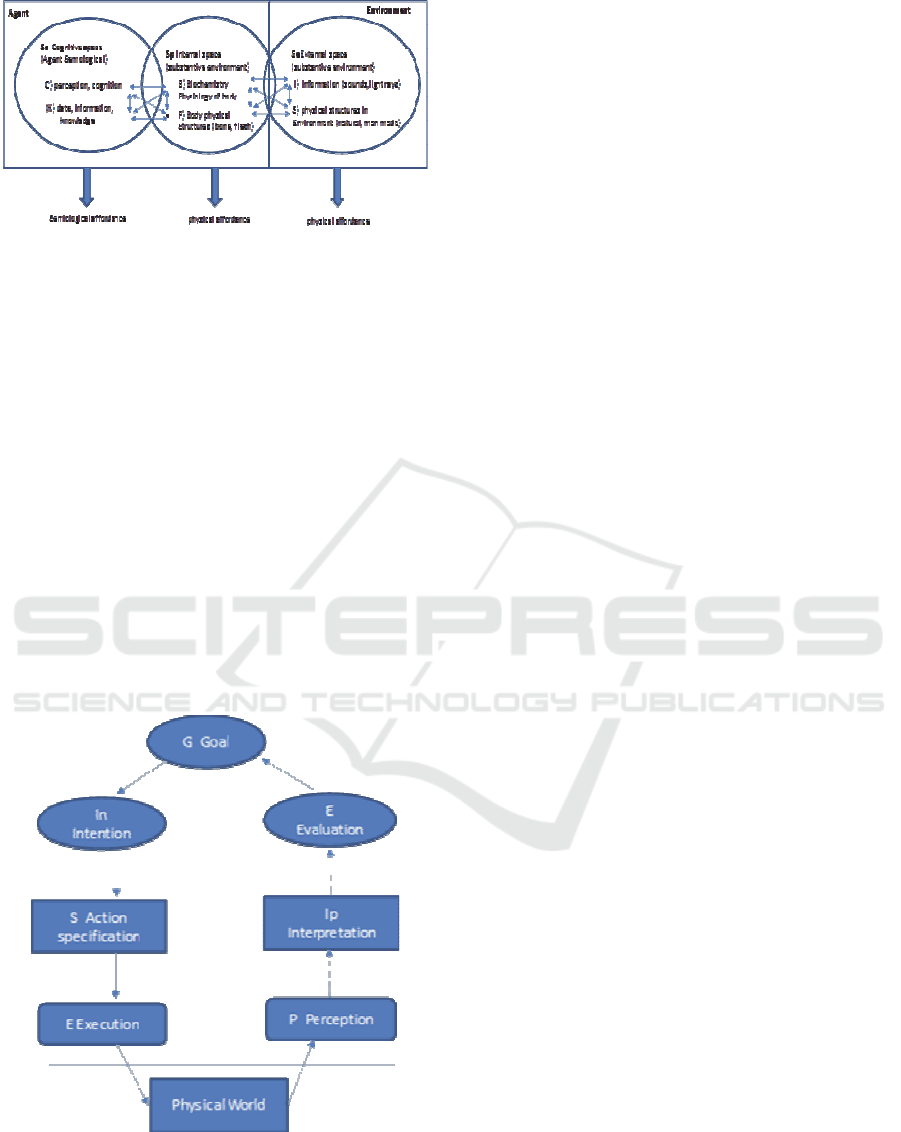
Figure 1: Affordance Spaces (adapted from Zhang).
3 AGENT COGNITIVE
RESOURCES
3.1 Cognitive Behaviour Modelling
To develop an understanding of the cognition
resources and their mechanisms AMcog we
investigate applied psychology cognitive behaviour
literature. Norman’s 7 stages theory of action can be
used to model cognition (Zachary et al., 1998). A
worker will have specific goals G and actions to
execute E to achieve them eg a surgeon examining a
patient. This may involve a cascade of sub-goals eg
visually examine patient talk to them, feel them.
Perception P involves recognising patterns of
speech, images from sensors and haptic patterns.
Figure 2: Norman’s 7 Stages of Action (adapted).
The agent interprets the perception Ip in terms of
how it relates to a planned course of action. The
agent evaluates options for action E vs the goals and
selects the best plan of action to achieve the goal.
The user then plans his actions in his mind makes
the intension In to act and specify the sensor-motor
driving actions S. The agents actuators eg hands,
limbs execute the action E. The result of the action is
then perceived through the senses and compared to
the goal and any corrective action applied. This P,
Ip, E, G, In, S, E loop can be considered to be
carried out at different levels of cognition.
3.2 The SRK Model
Rasmussen identified three types of cognitive
behaviour in the skills, rules, knowledge in the SRK
model of human decision making in high risk work-
system domains (Rasmussen, 1983). Skill based
behaviour corresponds to sensory motor
performance during unconscious actions and
unconscious control where the human sensor-motor
system acts automatically based on the agents tacit
knowledge of learnt tasks using learnt perceived
patterns (Albrechtsen, 2001 ). Continuous 4d space-
time data signals from agent sensors update a model
of the environment in episodic memory. Skill based
behaviour SBB relates to learnt sensory motor
patterns based on previous experience, eg changing
gear when driving etc and is termed unconscious
control because of its automatic response directly
from perception through the 7 stage model to sensor-
motor action. Conscious control involves greater
cognition using rule based behaviour RBB where
recognition of signs and cues from the sensors drive
an ‘if-then rule’ behaviour based on stored action
rules related to cues perceived from the
environment. This depends on perceptions of
familiar patterns in a familiar environment matching
the necessary cues/signs associated with the action
rule conventions (Vicente and Rasmussen, 1992).
Cues/signs relate either to experiences or
learnt/cultural behaviour encoded as rules labelled
for ‘states/situation or goals and tasks’ (Rasmussen,
1983). Rule based behaviour cannot generate new
rules, but this occurs in highest level of behaviour,
knowledge based behaviour KBB where the agent’s
mental model of the world enables the formulation
of new rules, goals and strategies and predictions of
the response of the environment. KBB can use both
sensor and history information to construct the
conceptual mental model (Albrechtsen, 2001).
Rasmussen’s SRK model identifies the three
mechanisms of cognitive processing as data signals
(SBB), as rules or cue-rule-action mappings or
symbol/concept based problem solving and analysis
actions (Vicente and Rasmussen, 1992).
Third International Symposium on Business Modeling and Software Design
88

Table 2: Cognitive tasks and actions.
3.3 Cognitive Task Analysis
Work on analysis of cognitive tasks (CTA) for
human computer interfaces (Hall et al., 1995)
(Norman, 1986) and ecological interface design
(Wong et al., 1998) provide additional models that
relate to cognition. We use the convention of
underlined letters as shorthand for cognitive tasks.
Miller’s vocabulary of actions for mental processes,
human information processing resources and their
related task agents (Lee and Sanquist, 1995), (Table
1a) represents the output of human cognition
resources. Bloom’s analysis of learning (Anderson et
al., 2005) identifies cognitive behaviours related to
cognition and learning. Recalling and remembering
knowledge is considered the lowest cognitive level
of activity that we can relate to SBB. With the
action of comprehending or understanding
knowledge at a higher level, that then enables the
ability to apply the knowledge as rules and actions.
The analysis activity is considered a higher level
activity still with evaluate and finally create (new
knowledge) and problem solving as the highest level
of cognitive activities in terms of complexity and
abstraction in the cognitive process. This relates to
KBB (Table 1b), where cognitive tasks relate to
transformation actions of agent mental cognition
resources.
4 AGENT KNOWLEDGE
RESOURCES
4.1 Cognitive Architectures
There are three main types of knowledge. Knowing
what or ‘learning by using relates’ to the use of
systems or technology as encoded in human episodic
memory and can be loosely approximated to SBB.
Knowledge from ‘learning by doing’ ‘know how’
corresponds to RBB (Carud, 1997). Rules are
evident in the external environment as procedures,
policies, processes and as tacit codified rules in
agents. KBB relates to ‘know why’ or knowledge
gained by ‘learning by studying’ as well as concepts
and relationships and tacit mental models created in
the mind (Carud, 1997). Cognitive architecture
theories; SOAR, EPIC, ACT-R, PARI) (Laird et al,
1987), can provide insight into knowledge
interaction. We use the COGNET knowledge
framework (Zachary et al., 1998) based on cognitive
psychology and goal oriented models based on
Rasmussen’s and Norman’s approach (Figure 3).
Managesattention
between cogni tiv e
tasks
DeclarativeKnowle dge(Kdec)
ProceduralKnowledge(Kproc)
PerceptualKnowledge(Kper)
Coded
symbols
Environment
ActionKnowledge(Kact)
Exter na l Acti o n
Acti vati on
Context
knowledge
Taskacti va tio n
Agent
New task based
con tex t
knowledge
Symbol
s
signs
4ddata
b
Sensory‐motor action
Sense/Perception
process
AxiologicalDecisionprocess
Epistemic
Evaluationprocess
Internal
Semiosi s Acti on
Acti vati on
Figure 3: COGNET Knowledge Framework (adapted).
4.2 Perceptual Knowledge and
Reasoning
In the COGNET model information from the agent’s
visual, aural haptic etc sensors is converted into 4d
space time signal information. Sensory cues are
perceived as visual (eg images) and auditory (eg
conversation) patterns (Zachary et al, 1998). This
sensory cue information in the form of signs
becomes meaningful by the process of perception
recognising patterns in the signals. COGNET uses
the term ‘sensory demons’ to refer to system
interface displays or patterns of natural phenomena
eg a red spotted mole disease pattern. Auditory
demons include speech terms and acts that have
specific semantic significance. The interpretation of
Cognition Capabilities and the Capability-affordance Model
89

signs in the environment is the process of semiosis
(Pierce, 1935) and a cognitive abduction process of
inference to select the best semantic meaning of a
sign eg for visual and aural recognition of patterns
(Magnani and Bardone, 2006) as in perception
related to a knowledge base of experience. In
Pierce’s process of semiosis, sensor signals for
objects in the environment are perceived as signs
and symbols representing objects and their meaning
for the agent are decoded in a process of connotation
(Benfell et al., 2013). The resulting perceptual
knowledge Kper relates to pattern recognition
models that link meaning to a visual model based on
working memory and with experience from long
term memory these provide ‘coded symbols’ that
can be used by other cognitive processes.
4.3 Declarative Knowledge and
Reasoning
Declarative knowledge, Kdec, includes the agent’s
mental conceptual model of the world based on the
concepts identified through symbols and semantics
mentioned earlier (Clark and Feldon, 2006) ie
‘knowledge as a conceptual structural model’
(Albrechtsen, 2001). It comprises abstract construct
symbols which unlike rules cannot be reduced to
signs (Rasmussen, 1983). It focuses on what and
why and is based on propositions, facts and is
hierarchically structured and uses episodic memory
to record environment events and model them (Clark
and Feldon 2006). The knowledge ranges from the
real world ie 2D/3D models of the physical
environment to logical relations and logic rules,
facts, beliefs and solution strategies and cases to
behavioural models and abstract models that have no
equivalent in the real world environment.
Declarative knowledge is used for problem solving
and includes the history of relevant objects to the
task and also plans and solution strategies to achieve
a goal (Zachary et al., 1998). KBB relies on the
individual tacit declarative mental model that the
agent constructs that differs from agent to agent.
Cognitive interpretation processes operate on the
declarative model schema to make connections
between symbols that enables insight and new
knowledge to be developed to support problem
solving. As Pirolli et al asserts Information=>
schema=> insight=> solution (Pirolli and Card,
2005). The power, capability and reliability of agent
KBB depends on the power, capability and
reliability of the symbolic mental model and
conceptual processing and related affordances. The
range and complexity of declarative conceptual
model covers predicates, definitions semantic
relations (structural, causal, functions) and simple
and complex associations as well as rules, facts and
beliefs (Aamodt, 1991).
4.4 Procedural Knowledge and
Reasoning
Procedural knowledge resources (Kproc) relates to
models of rules, for example national language rules,
job context rules eg clinical rules, mathematics rules
etc. The rules are encoded with cues for when a task
is relevant. Organisational semiotics models these
rules in the form of norms (Stamper et al., 2000).
The COGNET model suggests the goal and
procedural knowledge form a cognitive task which
directs the use of the knowledge through the
cognitive mechanisms to execute a semiological or
substantive task if the goal cue is recognised.
Tcog = f(goal, procedural knowledge) = f(G,Kproc)
Cognitive tasks are managed at a meta-cognitive
level of reasoning to decide which course of action
to take and when to take it. These evaluation
mechanisms are axiological mechanisms (Benfell et
al., 2013) for decision making and selection of
strategies related to agent internal resources
affording decision making and evaluation. Meta-
cognitive tasks adjust the priority of these tasks if
interrupted by perceived events in the external
environment eg bells ringing, 4d scene changes etc.
Interpretation Mechanisms. Reasoning involves
interpreting information (sign/rule processing and
symbols) about an environmental situation.
This could be from sensors and processing this
information in conjunction with knowledge to
produce a given goal. Reasoning may be rule based
as in RBB. Sign/rule processing relates to the if-then
reasoning using procedural knowledge ie selection
of the best rule according to sign cues from the
external environment. Alternatively it may be based
on models and cases in the symbolic conceptual
model as in KBB. Symbolic processing relates to the
processing of symbols and read, write and update of
the declarative knowledge model. This knowledge
based processing capability unlike rule based
processing is adaptive to new environments where
new knowledge and rules can be developed by
knowledge based reasoning (Albrechtsen, 2001). At
higher level this involves processing mechanisms for
inference methods. These methods may be deductive
based on logical mental models and theories or
inductive (knowledge of events and instances)
developed from experience, education and training
Third International Symposium on Business Modeling and Software Design
90
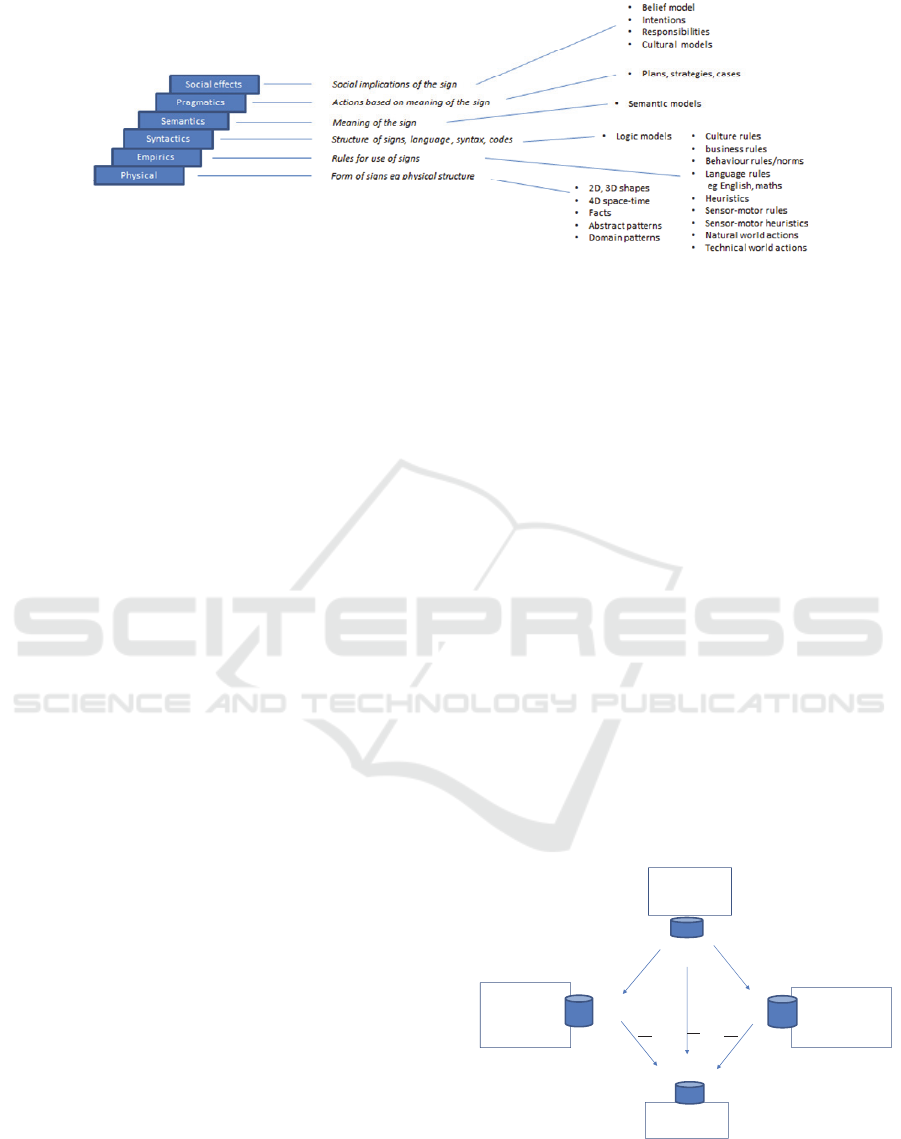
Physical
Empi ri cs
Syntactics
Semantics
Pragmati cs
Structure ofsigns, language,syntax,codes
Formofsignseg physicalstructure
Rulesforuseofsigns
Meaningofthesign
Actionsbasedonmeaningofthe sign
Soc i aleffects
Socialimplicationsofthe sign
• Logicmodel s
• Semanticmodel s
•
Belief
model
• Intentions
• Responsibilities
• Cultural models
• Culturerules
• businessrules
• Behavi ourrules/no
r
• Languagerul es
eg English,maths
• Heuri stics
• Sensor‐motorrul es
• Sensor‐motorheuri
• Natura lworl dactio
• Tec hnic alworl dact
• 2D,3Dshapes
• 4Dspace‐ti me
• Fa cts
• Abs tra ctpa tterns
• Domai npa tterns
• Pl ans,strategies,cases
Figure 4: Semiotic knowledge hierarchy (after Stamper).
(Aamodt, 1991). Other forms of reasoning include
induction and deduction based on neural connections
made during learning these techniques from others.
Deductive reasoning is based on logic models that
may be learnt or culturally developed. Inductive
reasoning involves testing against hypotheses.
4.5 Action Knowledge and Reasoning
Action relates to substantive action tasks on the
technical or natural environment. For example,
pressing buttons, moving objects. Alternatively they
may relate to semiological actions such as
communication (Zachary et al., 1998) or thinking
that changes the state of the mind but has no external
impact. Action knowledge relates to sensor-motor
knowledge of how to drive and control the agent
actuator bio-mechanics to control movement eg of
hands/body. This relates to skills under automatic
control in terms of hand-eye coordination driven by
environmental cues for physical tasks. Action
knowledge includes sensory-motor knowledge for
natural objects as well as man-made technology eg
hand-eye coordination for drug injection or routine
mental maths calculations.
4.6 Knowledge Summary
We have seen an agent’s knowledge covers a range
of semiotic ladder levels. Rules and schemas may
relate to the physical world. They may relate to use
of language and the syntax for example sentence
construction or mathematical expressions. They may
relate to expected behaviour encoded from
experience or business rules to cultural rules about
behaviour. Rules may relate to formal models eg
laws or they may be informal may be developed
from experience, for example rules of thumb. Rules
may relate to both physical and mental behaviours
(Benfell et al., 2013). See Figure 4.
5 THE
COGNITION-AFFORDANCE
MODEL
Cognition affordance relates to a) the interaction of
cognitive reasoning processes of the brain with
knowledge to model potential actions and strategies
for the real or imaginary agent world and b) the
selection the best course of action either physical or
mental. Cognition affordance depends on semiosis
of perceived signs interpreted as sensor signals from
the real world and/or from the conceptual world of
the imagination of the agent using these signals,
signs, symbols to model the real and imaginary
worlds to plan actions. Cognition capability depends
on the mechanism of cognitive tasks (Ct) acting on
cognitive knowledge ie Ccog = f(Ct xCknow). The
Cognition Model (figure 5) based on organisational
semiotics EDA model (Liu et al., 2013) identifies
and integrates cognitive processes in conjunction
with the models discussed earlier.
PERCEPTUAL
REASONING
EPISTEMIC
REASONING
ACTION
REASONING
AXIOLOGICAL
REASONING
SBB
KBB
RBB
Mode ls (s ymbols)
• Domain3d,4d
• Facts/beliefs
• Logi ca l relations/rules
• Strategies,cas es
• Goals
• Conceptual relations
Rules(s i gns ‐cues)
• Cog/meta cognitiverules
• Culturerules
• businessrules
• Behavi ourrules/norms
• Language rules
• heuri s tics
Patterns
• 2D,3Dshapes
• 4Dspace‐time
• Abs trac tpa ttern s
• Domainpatterns
• Sensor‐motorrules
• Sensor‐motorheuristics
• Natural worl dacti ons
• Techni cal worl dactions
Signs /cues
Whatispossible andwhen?
What?
Why?
How?
Interpet
Perce
i
ve
Evaluate
Act
Kdec
Kper
Kproc
Kact
Figure 5: Cognition model.
Perception relates to pattern recognition
reasoning on perception knowledge Kper. Epistemic
Cognition Capabilities and the Capability-affordance Model
91

reasoning relates to inference processes and
reasoning about conceptual declarative knowledge
Kdec. Axiological reasoning relates to rule based
decisions about behaviour operating based on
procedural knowledge Kproc. See Figure 5.
5.1 Perception Capability and
Reasoning
Perceiving patterns in the environment relates to
lower order cognitive tasks such as recalling RE and
comprehending CO. This depends on matching
perceptive knowledge ie the range of pattern
databases the agent possesses or making sense of
new patterns via epistemic reasoning. For example a
clinician in seeking to identify a disease needs to
match the cues from the patient in terms of
visual/aural/haptic information after examining and
talking with the patient and reading their notes. The
clinician may build a perceptual model of the patient
based on disease patterns, physiology patterns and
models of consequences (Chapman et al., 2002).
This produces a number of affordance options as
possible disease models that need to be interpreted
based on their plausibility relative to perception.
This represents a cycle of Norman’s model to meet
the goal and intention of identifying the disease
model for the patient.
Cper= f (perceptual reasoning tasks x Kper)
Audio perception is a function of the ability to both
record and to match aural patterns sensed in the
environment as a language of sounds with meaning.
A language affordance eg ‘can speak English’
depends on the action of the cognitive processing
resource recalling (RE) and matching information
from the language patterns and the quality; depth,
range of the agent vocabulary Klang.
Cper= f(Alang) = f(RE x Klang)
Similarly, visual perception affordances Avip are a
function of the ability to both record and to match
visual patterns sensed in the environment to
meanings. For example visual perception affords
recognition of disease patterns by recalling (RE) and
comprehending (CO) disease patterns and cues that
best match the sensed disease pattern which depends
on the cognitive action of recall and its interaction
with disease knowledge.
5.2 Interpretation Capability Cepi
Cepi - Epistemic reasoning involves higher
cognitive tasks such as analysis AN, synthesis SN,
problem solving PS and creativity CR as useful
strategies in unfamiliar situations. Reasoning
strategies such as induction, abduction and
deduction may be used. The use of epistemic
reasoning in medicine is often referred to as
hypothetico-deductive reasoning (Chapman et al.,
2002) and involves establishing a hypothesis for the
problem illness, gathering data to support or refute
the hypothesis followed be evaluation to establish
the best causal reasoning (ie know why’) for the
symptoms. This requires conceptual knowledge
models of illness, disease functionalities,
mathematics etc. Affordance options relate to the
different problem- solution models and their
plausibility vs goal/evidence ie Cepi = f (prob
solving reasoning x Kdec). The capability of
epistemic reasoning as in expertise, is complex and
in any individual will vary with the ability to reason
and conceptually model the world and the depth,
specificity and form of the knowledge the agent is
able to develop (Aamodt, 1991).
5.3 Evaluation Capability Caxi
Caxi refers to: Axiological reasoning.
It relates to cognitive tasks using RBB and
decision processes to select the best rule given
environmental or mental cues. Affordance options
here relate to the permutations of the possible meta-
cognitive actions and their sequences and the
cognitive task based are different rule models and
their plausibility vs cues and the action goal.
Caxi = f (rule reasoning x Kproc)
Cognitive tasks relate to actions on procedural and
declarative knowledge. Cognitive tasks include
understanding and problem solving where obvious
rules can’t be invoked and declarative knowledge is
required. This may include information processing
strategies such as Miller’s cognitive tasks planning
PL and controlling CT (Lee and Sanquist, 1995).
The rule evaluation takes place at different levels in
the semiotic ladder. From the evaluation of laws and
policy rules down to process and action rules. The
rules act as a constraint on the possible actions. A
clinician has many different rule sets to follow. At
high level may be policies and WHO guidelines at
the process level clinical pathways can be selected to
guide possible team actions. At the action level
algorithms (eg for inserting catheters) and the
clinicians own heuristic rules developed from
experience. The affordance options relate to
different disease/illness rule models and the
cognitive process involves the clinician deciding
Third International Symposium on Business Modeling and Software Design
92

which rules to apply by assessing a series of
permutations of cues and disease patterns.
5.4 Action Capabilities Cact
Action capabilities relate to automatic actions ie
unconscious thought and skill based actions. This
includes human-environment sensory motor skills eg
grasping, human-technology skills eg using a mouse
to drag and drop and human-human interactions eg
shaking hands etc. A medical example might be
identifying the actions and behaviours to stabilise an
emergency patient (Chapman et al., 2002).
Affordance options are different action models and
their plausibility vs cue/stabilisation goal. Here the
clinicians react instinctively to act based on
experienced action knowledge of the steps to take
how to behave and use equipment and human
resources based on the cues for action from the
patient, colleagues, technology resources and the
situation ie Cact= f (action reasoning x Kact).
6 DISCUSSION
Cognition axes are proposed in this section as well
as cognitive capabilities.
6.1 Cognition Axes: Real Vs Imaginary
We can say cognition capability is a tuple of these
four capabilities:
Ccog = f (Cper, Cepi, Caxi, Cact)
In all the above cases the cognitive capability of
the clinician will depend on experience, cognitive
ability and cognitive resources. As Gibson notes:
interpretation depends on the agents culture,
experience and intentions (Benfell et al., 2013). The
following sections discuss differences in cognitive
capability. The agent cognitive affordance space Sc
relates to how the mental models and reasoning
process can provide the agent with alternative action
possibilities. This represents the interaction of the
cognitive reasoning mechanism resources with
memory and knowledge. The axis of linkage
between perception-action represents affordance
possibilities in the real world of seeing and doing ie
perceived and cognitive affordances. HCI design
depends on making possibilities of using the
technology as obvious as possible so they can
directly be used for action. We suggest the linkage
between interpretation and evaluation represents the
imagination where possible concepts and possible
actions can be modelled and the implications tested
before action is decided. Another aspect of cognitive
affordance is the possibility to imagine or model
new imaginary interactions and imaginary logics and
languages. Imagination suggests a conceptual
environment that can model a) the real world and its
features and use it to identify possible future states
and secondly b) to model imaginary worlds with
different rules, logic and beliefs. This capability
enables great works of literary fiction (Harry Potter),
art (Salvador Dali), science (relativity theory).
Techniques such as brainstorming and creative
methods where normal logic and beliefs are
suspended can sometimes highlight new possibilities
where the imaginary world highlights a new
possibility or creative affordance applicable to real
world logic. Perhaps the process of dreaming is
nature’s mechanism for trying out possible illogical
affordances that would not have occurred to the
conscious animal having to make sense of a real
physical world!
Real worl d
Model axis
Imaginaryworl d
Modelaxis
Real world rules
&constra i nts
Modelled
worl d
Per
Act
Eval
Int
Perception
‐actionworld
seeing
doing
imagining
Figure 6: b) real vs imagi ned world intersections
Imaginaryworld
model
Realwor ldmodel
Brainstormingsolutions
Figure 6: Cognition Axes – real vs. imaginary.
6.2 Comparing Cognitive Capabilities
Experience and practice in each of the cognitive
mechanisms will be determined by the roles and
work the agent carries out and how much involves
real world vs imaginary world models. Some job
roles involve a greater focus on seeing and doing eg
a nurse, artist. Other roles focus more on
imagination and conception without action as in the
theoretical world eg novelist, scientist. Different
roles will exercise and focus different cognitive
functions. Some involve a combination eg a knee
surgeon, may have good levels of perception of
disease, 3d structures and have good haptic
Cognition Capabilities and the Capability-affordance Model
93

perception with much experience of manipulating
joints. He may have lots of logic and problem
solving experience, some experience of using
clinical pathway rules, but will have less experience
in policy rules and in reasoning about them
compared to a Medical Director. An anaesthetist
may have better abilities for reasoning about drugs
based on repeated experience. In contrast an artist
may be more creative than the surgeon because they
focus their life on painting which involves seeing-
doing action experience in terms of visual perception
and painting heuristics. Their imagination is less
structured and may involve creating and using
imaginary rules and concepts. In contrast an
architect’s creativity will be more structured as it is
limited by the rules of physics. Natural abilities to
perceive, follow rules, to reason will also depend on
the brain physiology as well as experience.
Ccog = f(Experience Ex x Reasoning Ability Ab)
6.3 Knowledge Paths
Knowledge is developed by the process of learning
from experience and/or use of cognitive capabilities
and mental modelling or taught or communicated by
others. In each and every case both the knowledge
and the cognitive capabilities is potentially growing
depending on the brain physiology and individual
cognitive capabilities ie intelligence of the
individual. Benfell et al., (2013) mentions the link
between affordance and memes in which
affordances ie ideas are communicated ‘by reading,
watching television etc’ It is this exposure to
affordance examples that enables direct copying.
Alternatively we may use our existing knowledge
and cognitive skills to playing with and mutate
ideas. We may use existing logic to extend our
knowledge or, depending on our capabilities, create
new logic to produce new knowledge. This happens
at different levels of the semiotic ladder from the
knowledge of the physical world through formal to
informal abstractions such as culture knowledge
with learned formal and or informal rules/heuristics.
See Figure 7.
existi ng
pa tterns ,
logic
alternative
imaginary
logic/play
Exi sting
Knowledge
Appl y
Copy
Mutate
Build
Extend
Figure 7: Knowledge paths.
7 SUMMARY AND
CONCLUSIONS
This paper has shown how the capability-affordance
model and others can provide an approach to explain
the possible interactions of mental resources that
produce creative thought possibilities and cognition
affordances and meet our objectives. Section 2
explained the reasoning for semiological affordances
by identifying the internal cognitive space and its
relationship to cognitive affordance - objective a).
To develop a model of semiological affordances
(objective c) in Section 3 we identified cognition
resources using the SRK model and cognitive task
analysis. In section 4 we proposed agent knowledge
resources based on cognition architecture and we
suggested how semiotics and Peirce’s model relate
to cognition mechanisms. In section 5 we showed
that Cognitive capability depends on cognitive
functions interacting with knowledge and proposed
4 mechanisms for cognition. We proposed in section
6 that the cognitive path (objective d) depends on the
knowledge paths where existing knowledge is
applied and grown by copying or mutation. Mutation
can occur as a result of mind games, mental playing
and imagination. This mutation may use existing
logic of Ccog to creative new knowledge directly
applicable to the real world. or, to create new
knowledge that is not directly applicable as
theoretical knowledge. To account for creativity
(objective e) we proposed how perceived and
cognitive affordances relate to the perception-action
axis and the epistemic-axiological axis relates to
mental theoretical models to extend the real world
model or create new imaginary worlds as in
creativity.
8 FUTURE WORK
The complexity of cognition (the process of using
cognitive actions and knowledge) means we have
only scratched the surface. Further work is needed to
identify the detailed mechanisms of cognitive
affordance permutation with specific examples using
cognitive task analysis. For example how does a
novelist or artist think compared with a surgeon.
However whilst methods such as Cognitive task
analysis can provide useful insights into the
processual mechanisms, the detailed models rely on
developments in cognitive psychology and medical
research.
Third International Symposium on Business Modeling and Software Design
94

REFERENCES
Aamodt, A. (1991). A knowledge-intensive, integrated
approach to problem solving and sustained learning.
Knowledge Engineering and Image Processing Group.
University of Trondheim, 27-85.
Albrechtsen, H., Andersen, H. H. K., Bødker, S., &
Pejtersen, A. M. (2001). Affordances in activity theory
and cognitive systems engineering.
Anderson, L.W., Krathwohl D.R.,Bloom B.S.. (2005) A
taxonomy for learning, teaching, and assessing.
Longman.
Barentsen, K., and Trettvik, J. (2002). An Activity Theory
Approach to Affordance, Second Nordic Conference
on Human Computer Interaction: ACM, pp. 51-60.
Benfell A., Williams R., Liu K. (2013)Enriching
enterprise resource planning systems for strategic
advantage: A semiotic motivated approach.
Proceedings of ICISO, Stockholm.
Boy, G. A. (1998). Cognitive function analysis (Vol. 2).
Praeger Pub.
Carud, R. (1997). On the distinction between know-how,
know-why, and know-what. Advances in strategic
management, 14, 81-101.
Chapman, D. M., Char, D. M., & Aubin, C. D. (2002).
Clinical decision making. Rosen1s Emergency
Medicine concepts and clinical practice, 125-133.
Clark RE., Feldon D.F.(2006): "Instructional implications
of cognitive task analysis as a method for improving
the accuracy of experts’ self-report." Avoiding
simplicity, confronting complexity: Advances in
studying and designing (computer-based) powerful
learning environments 109-116.
Hartson, R. (2003). Cognitive, physical, sensory, and
functional affordances in interaction design. Behaviour
& Information Technology, 22(5), 315-338.
Hall, E. P., Gott, S. P., & Pokorny, R. A. (1995). A
Procedural Guide to Cognitive Task Analysis: The
PARI Methodology (No. AL/HR-TR-1995-0108).
ARMSTRONG LAB BROOKS AFB TX HUMAN
RESOURCES DIRECTORATE.
Laird, .J. E., Newell, A., Rosenbloom P.S..(1987) Soar:
An architecture for general intelligence. Artificial
intelligence 33.1 1-64.
Lee, J. D., & Sanquist, T. F. (2000). Augmenting the
operator function model with cognitive operations:
Assessing the cognitive demands of technological
innovation in ship navigation. Systems.
Liu S., Liu K., Li W. (2013) A multi-agent system for
pervasive healthcare. Proceedings of ICISO,
Stockholm.
Magnani, L., & Bardone, E. (2006). Designing human
interfaces. The role of abduction. Computing,
Philosophy and Cognition. College Publications.
Michell, V.A.(2011) A Focused Approach to Business
Capability. First International Symposium on Business
Modelling and Software Design – BMSD 2011, Sofia,
Bulgaria, pp. 105–113.
Michell V. (2013) The Capability Affordance Model:
Comparing Medical Capabilities. In: B. Shishkov
(Ed.) Business Modeling and Software Design –
BMSD’12 Revised Selected Papers, Springer-Verlag –
Lecture Notes in Business Information Processing,
Berlin-Heidelberg.
Pierce C. S. (1931-35), Collected Papers, (6 volumes),
Hartshome C. & P. Weiss (eds.), Cambridge, Mass.
Harvard U.P.
Pirolli, P., & Card, S. (2005, May). The sense making
process and leverage points for analyst technology as
identified through cognitive task analysis. In
Proceedings of International Conference on
Intelligence Analysis (Vol. 5).
Rasmussen, J. (1983). Skills, rules, and knowledge;
signals, signs, and symbols, and other distinctions in
human performance models. Systems, Man and
Cybernetics, IEEE Transactions on, (3), 257-266.
Stamper, R., Liu, K., Hafkamp, M., Ades,
Y.(2000)Understanding the Role of Signs and Norms
in Organisations. Journal of Behaviour & Information
Technology 19(1), 15–27.
Vicente, K. J., & Rasmussen, J. (1992). Ecological
interface design: Theoretical foundations. Systems,
Man and Cybernetics, IEEE Transactions on, 22(4),
589-606.
Wong, W,B,L.Sallis P.J., O'Hare. D., (1998) The
Ecological Approach to interface design: Applying the
Abstraction Hierarchy to intentional domains
Computer Human Interaction Conference,
Proceedings. Australasian. IEEE.
Zachary, W., Ryder, J. M., &Hichinbothom, J. H. (1998).
Cognitive task analysis and modelling of decision
making in complex environments. Making decisions
under stress: Implications for individual and team
training, 315-344.
Zhang, J., & Patel, V. L. (2006). Distributed cognition,
representation, and affordance. Pragmatics &
Cognition, 14(2), 333-341.
Cognition Capabilities and the Capability-affordance Model
95
