
Robust Multi-Human Tracking by Detection Update using Reliable
Temporal Information
Lu Wang, Qingxu Deng and Mingxing Jia
College of Information Science and Engineering, Northeastern University, Shenyang, China
Keywords: Multi-Target Tracking, Data Association, Detection Update, Video Surveillance.
Abstract: In this paper, we present a multiple human tracking approach that takes the single frame human detection
results as input, and associates them hierarchically to form trajectories while improving the original
detection results by making use of reliable temporal information. It works by first forming tracklets, from
which reliable temporal information can be extracted, and then refining the detection responses inside the
tracklets. After that, local conservative tracklets association is performed and reliable temporal information
is propagated across tracklets. The global tracklet association is done lastly to resolve association
ambiguities. Comparison with two state-of-the-art approaches demonstrates the effectiveness of the
proposed approach.
1 INTRODUCTION
Object tracking in video surveillance aims at
extracting objects' spatial-temporal information,
which is mandatory for higher level activity
recognition. However, it is not trivial due to
difficulties such as low figure-ground contrast,
changes in object appearance over time, abrupt
motions, and etc. Multiple object tracking is even
more challenging as inter-object occlusions exist
prevalently.
Tracking by detection is effective for solving the
multiple object tracking problem and therefore has
been widely applied (Wu, 2007; Huang, 2008,
Breitenstein, 2011). It usually consists of two steps:
The first one is time-independent object detection
and the second is detection responses association
temporally based on appearance similarity, motion
consistency, etc. Compared to traditional visual
tracking (Rasmussen, 2001; Comaniciu 2003; Wang,
2010), tracking by detection can effectively avoid
the drifting problem caused by accumulated tracking
error. In addition, it is robust to occasional detection
failures, i.e. isolated false alarms or missed
detections are less likely to lead to tracking failures.
As a good compromise between association
accuracy and computation complexity, tracklet (i.e.
track fragment) based approaches (Stauffer, 2003;
Perera, 2006; Huang, 2008) have become more and
more popular. In these approaches, tracklets are first
generated by conservative linking of detections of
consecutive frames, which helps reduce the possible
linking space significantly. Then, given the affinities
between potentially linkable tracklets, the
association problem is typically solved by the
Hungarian algorithm (Munkres, 1957). For example,
Stauffer associates tracklets using the Hungarian
algorithm with an extended transition matrix that
considers the likelihood that each tracklet being the
initialization and termination of trajectories (Stauffer,
2003). This approach performs iterative tracklet
association and scene entrances/exits estimation
using expectation maximization . Perera et al. adapt
the Hungarian algorithm to deal with the merging
and splitting of tracklets in multiple object tracking
when long time occlusion exists (Perera, 2006). Both
Stauffer and Perera's approaches define the tracklet
affinity only once, which may not be accurate
enough due to the errors introduced by inaccurate
localization in the detection phase. Huang et al.
propose a hierarchical data association strategy, in
which tracklet affinities are refined whenever new
tracklets are formed during the progressive tracklet
linking procedure (Huang, 2008). To further
increase the robustness of the affinity measures, a
few approaches have been recently proposed. For
example, Li et al. propose a HybridBoost algorithm
to learn the affinity models between two tracklets
(Li, 2009). Kuo et al. propose global on-line
387
Wang L., Deng Q. and Jia M..
Robust Multi-Human Tracking by Detection Update using Reliable Temporal Information.
DOI: 10.5220/0004733203870396
In Proceedings of the 9th International Conference on Computer Vision Theory and Applications (VISAPP-2014), pages 387-396
ISBN: 978-989-758-009-3
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)
discriminative appearance models, where descriptors
are pre-defined (Kuo, 2010), and later they propose
to use automatic important feature selection by
learning from a large number of local image
descriptors (Kuo, 2011). Yang et al. propose to learn
non-linear motion patterns to better explain direction
changes (Yang, 2012).
In this paper, we present a tracklet based data
association approach for multiple human tracking in
surveillance scenarios, with the assumptions that the
camera is static, people walk on a ground plane and
camera parameters can be obtained. Unlike most of
the previous data association works that only
consider how to ensure correct linking, we also
attempt to improve the detections when reliable
temporal information can be obtained. To this end,
we first generate tracklets by conservative linking of
detections, and extract the appearance, size and
position information of those reliable detections that
show high temporal and spatial consistency. Then
the extracted information is propagated to detections
within the tracklets by refining the detections' shape
models. After that, local conservative tracklet
association based on the Hungarian algorithm is
performed so that reliable temporal information can
be further propagated. The iteration stops when there
are no new detection updates or new tracklet
association. Finally, the Hungarian algorithm is
applied globally to resolve ambiguous situations and
. The whole process ends when neither new updates
nor association can be performed. The outputs of the
approach are the updated detection responses as well
as the associated trajectories.
Our proposed approach is most related to Huang
et al.'s approach (Huang, 2008), where data
association is formulated as a Maximum a Posteriori
(MAP) problem and solved by the Hungarian
algorithm. We made necessary improvements over
that approach for more robust performance. The first
one is that reliable temporal information is extracted
to improve the quality of detections and tracklets.
The second one is that we propose a local tracklet
association procedure before global association,
which is more conservative and less likely to make
errors. The third one is that we use the reliable
temporal information to recover missed head or tail
parts of tracklets, bringing in the advantages of
shortening gaps between tracklets, hence enabling
associations to be made more robustly, and making
the resulting tracks more complete. The fourth one is
that we detect tracklets that may violate the 1
st
-order
Markov Chain assumption and approximate the 2
nd
-
order Markov Chain on them.
In summary, our main contributions are three-
fold:
1) Improving the accuracy of human detection by
using reliable temporal information;
2) A new iterative hierarchical data association
framework;
3) When perform global data association, explicitly
detecting tracklets that may violate the 1
st
-order
Markov Chain assumption and approximate the
2
nd
-order Markov Chain on them.
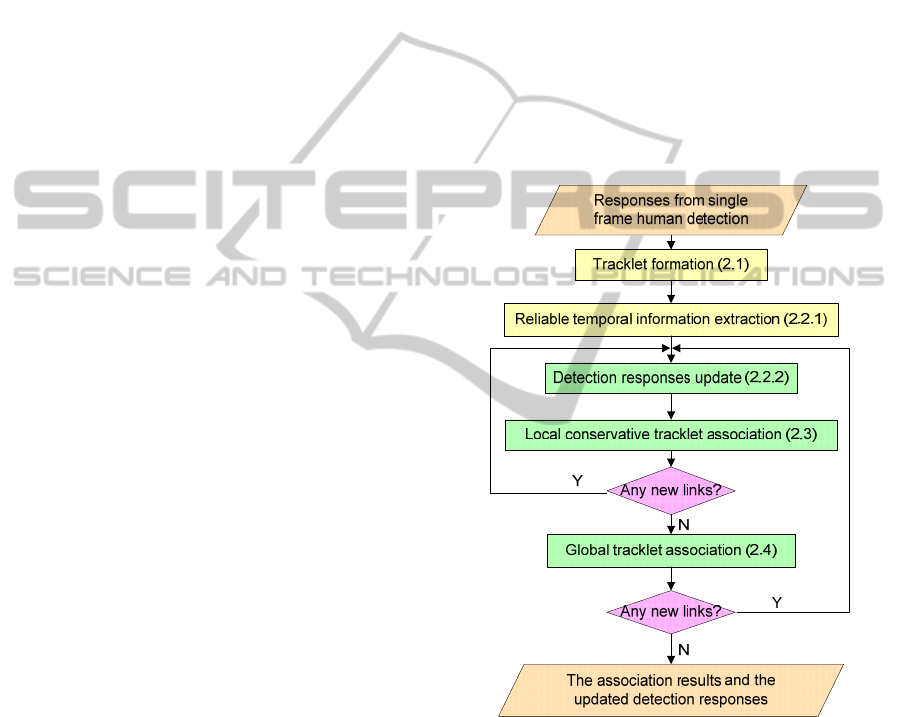
2 THE PROPOSED APPROACH
In this section, we will introduce the detail of the
proposed association approach. The diagram of the
approach is illustrated in Figure 1.
Figure 1: The diagram of the proposed data association
approach.
2.1 Human Detection and Tracklet
Formation
The single frame human detection result is firstly
obtained using a crowd detection approach (e.g. Wu,
2007). Then model fitting, as proposed in Wang,
2012, is applied to find the best matched 3D shape
model for each detection response r, with the model
parameters being the 3D location z, the orientation
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
388

o, the size s and the leg posture pose.
Given all the detection responses ={r
i
} and the
corresponding model parameters, the detections are
firstly associated conservatively to form the
tracklets, and the affinity A(r
i
, r
j
) between any two
detection responses r
i
and r
j
is defined as:
ij ij
ij
(, ) (, ) if 1
(, ) =
0otherwise
app pos j i
AA ff
A
rr rr
rr
,
(1)
where A
app
(r
i
, r
j
) and A
pos
(r
i
, r
j
) represents the
appearance similarity and position proximity
respectively, and f
i
denotes r
i
's frame index.
As the human model is part based, to make the
appearance model more discriminative, we define a
three-part appearance model a = {a
pt
| pt=h, t, l} for
each detection, where pt denotes the body part, h, t
and l represent head, torso and legs respectively, and
each a
pt
is an 8
8
8 RGB color histogram. The
appearance affinity is calculated as
,, ,,
{,,}
,,
{,,}
min( , ) ( , )
(, )
min( , )
p
tiptjptiptjpt
pt h t l
app i j
pt i pt j pt
pt h t l
wvvBC
A
wvv
aa
rr
,
(2)
where v
i, pt
is the visible ratio of part pt of r
i
, BC
calculates the Bhattacharyya coefficient of two
histograms, and w
pt
is the weight for part pt. For a
human object, as the head and torso are more
accurately described by the model than legs, they
should have higher weights than legs. Therefore, we
set w
h
=w
t
=0.4 and w
l
=0.2. Slight changes of these
weights would make no obvious difference.
The position proximity of two detection
responses is defined in terms of the distance d
traversed by a human at a high speed within one
time step:
1if
(, )
(max( ,0);0, ) otherwise
ij
pos i j
ij
d
A
Gd
z
zz
rr
zz
,
(3)
where G(
; x
0
, σ
x
) represents the Gaussian
distribution with mean x
0
and standard deviation σ
x
.
In our experiment, we set d to be 0.7 meters when
the time step is 0.4 seconds.
Having the affinity values, the two-threshold
strategy as presented in Huang, 2008 is used to
generate the tracklets, i.e. two responses are linked if
and only if their affinity is high enough and
significantly higher than the affinity of any of their
conflicting pairs.
2.2 Detection Responses Update
Given the tracklets, reliable temporal information is
extracted from them and used to refine related
detections by means of model matching. By reliable
temporal information, we mean that the appearance,
position and size information of the corresponding
detection is accurate enough so that these pieces of
information can be used to guide the update of
detections of same identity in neighboring frames.
2.2.1 Reliable Temporal Information
Extraction
To extract reliable temporal information, we first
look for the reliable detections. Specifically, we
detect reliable detections according to the following
criteria:
a) The detection's head contour is well aligned
with the foreground contour; and
b) The detection has high appearance, head
position and feet position affinities with its
adjacent detections; and
c) There are at least three consecutive detections
from the same tracklet that satisfy a) and b)
simultaneously (We choose three to avoid the
coincidental satisfaction of condition a) and b).).
Figure 2 illustrates some reliable detection responses
found by the above criteria.
Figure 2: Illustration of reliable detections.
Next, we refine the models of unoccluded reliable
detections by using the temporal information
provided by the tracklets. Those occluded ones will
be refined when their occluding objects have been
refined. The best matched model M for a reliable
detection is selected as
0
00
(,,,)
0
max ( ; , ) ( ; , )
( ( ( , , , )))
s
o
mposeso
s
MGssGoo
L B m pose s o
p
p
,
(4)
where m represents the 3D model; B(m) is the
model’s boundary on the image; s
0
is the average
size of the reliable detections within the
corresponding tracklet; o
0
is the detection's
tangential direction in the tracklet; L
s
is the shape
RobustMulti-HumanTrackingbyDetectionUpdateusingReliableTemporalInformation
389

likelihood measuring how well the model matches
with the image edges (see Wang, 2012 for details);
p
0
is the original model's head position on the image,
which is assumed to be accurate and needs not to be
refined. Figure 3 shows an example of the best
matched model before and after using the temporal
information, where the original wrong orientation
estimation has been corrected.
Having the updated models for the reliable
detections, we then extract the corresponding
appearance, size and position information from them
and propagate it to the other frames.
(a) (b)
Figure 3: Illustration of the best matched models without
and with the temporal information. (a) Without temporal
information; (b) With temporal information.
2.2.2 Temporal Information Propagation
For an unoccluded detection adjacent to an updated
detection in the same tracklet, we refine it by using
the reliable temporal information. An unoccluded
detection means that the person corresponding to the
detection is fully visible, or occluded by the image
border, or a human object whose occluding human
objects have already been updated. Unlike reliable
detections, the original head position estimation for
an ordinary detection may not be correct. Therefore,
we first predict its head and feet positions separately
using the temporal information. If the predicted
position is quite near to the original position, the
original position is taken to be correct; otherwise,
both the original and the predicted positions are
checked. Specifically:
(a) If the original head position p
0
is considered to
be correct, we do model matching by
0
00
(,,,)
00
max ( ; , ) ( ; , )
( ( , , , ), ) ( ( ( , , , )))
so
mposeso
app ref s
MGssGoo
A m pose s o L B m pose s o
p
pr p
,
(5)
where r
ref
is the referenced detection response
in the adjacent frame. The difference between
(4) and (5) is the appearance affinity term A
app
,
as in the current stage we have an appearance
model to refer to.
(b) Otherwise, if the feet position is taken to be
correct, the head position p
0
is first searched
using the following equation
0000
max ( ; , ) ( ; , )
((,,),)(((,,)))
s
app ref s
Gss Goo
A ubm s o L B ubm s o
p
p
pr p
,
(6)
where ubm represents the upper body model,
which is used to avoid the high computational
cost of searching for the optimal leg pose. Then
model matching is performed according to (5).
(c) If neither the head position nor the feet position
is correct, we search the head position using the
original and the predicted feet positions
separately (both the original and predicted
positions are considered here to take into
account of sudden motion changes) as in step
(b). Then the searched head position with higher
upper body appearance affinity to the reference
appearance model is taken to be correct and
model matching is performed on it as in step (a).
After obtaining the best matched model, the
detection’s appearance is updated. To deal with
occlusion, the appearance model a is renewed by
(1 )
model ref
ava va
,
(7)
where a
model
is the appearance model of the newly
obtained shape model; a
ref
is the referenced
appearance model; v={v
pt
| pt=h, t, l} and v
pt
is the
visible ratio of part pt; α is the smoothing factor,
which helps avoid large changes of the appearance
model caused by incorrect detection update, and is
set to be 0.2. A body part pt is not updated if v
pt
is
less than 0.5, as in such situation the part is
considered as severely occluded and hence
unreliable.
2.2.3 Occlusion Order Determination
As our approach requires that a detection be updated
only when it becomes unoccluded. However, the
occlusion order obtained from the original detection
result may contain inaccuracy and hence needs to be
properly dealt with.
For two detections whose heads are at the similar
horizontal level in the image and whose torsos
intersect for only a small percentage (5% is used in
our experiment), we consider they are not mutually
occluded. In addition, we assume that, if it can be
definitely determined that a detection A occludes
another detection B in one frame f, it is impossible
that B can occlude A in frame f-1 and frame f+1,
because normally two persons could not change the
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
390

occlusion order within a very short time interval.
Furthermore, false positives (FPs), may
introduce problem when propagating the reliable
temporal information, because FPs may occlude
some true detections and FPs are very unlikely to be
updated as it cannot link to any reliable detections.
Therefore, we collect the detections that cannot be
linked to any other detection responses as candidate
FPs. By doing so, a detection response is allowed to
be updated if it is only occluded by a candidate FP.
In case that a candidate FP is found to have a high
affinity to an updated detection, it is not taken as an
FP anymore.
2.3 Conservative Local Data
Association
After all the possible detection updates have been
made inside each tracklet, the tracklets can be
associated. However, as only a small portion of
detections may have been updated at this stage, the
tracklets' link probability may still contain many
inaccuracies, making global association of tracklets
too risky to perform at this time. Therefore, we
introduce an intermediate tracklets association step,
namely local conservative Hungarian linking, which
only aims at performing association for tracklets that
exhibit high link probability and low ambiguity, and
at the same time have no gaps in between. In
addition, if an end of a tracklet has been updated but
has no other tracklets to link to, we infer that some
object might be missed at the detection stage and use
the detection update method as a detector to recover
the missed detections. For the other more ambiguous
connections, we leave them to the later global
Hungarian linking.
From here on, we use double subscripts to
represent the quantities corresponding to the
detections of a tracklet, with the first denoting the
index of the tracklet and the second denoting the
detection's index inside the tracklet. For example,
the detections of a tracklet T
i
is denoted as r
i,k
, where
k={1, 2, …,|T
i
|}. We also denote by
{}
end
f
i
T
the
set of all the tracklets that end at frame f and
1
{}
start
f
j
T
the set of all the tracklets that start at
frame f+1.
2.3.1 Local Affinity Definition
In conservative tracklets association, the link
probability between two tracklets
end
if
T
and
1
s
tart
jf
T
is defined as
P
link_local
(T
i
, T
j
)= P
app
(T
i
, T
j
)P
local_motion
(T
i
, T
j
). (8)
P
app
(T
i
, T
j
) calculates the affinity according to (2)
between the average appearance model of the last
three detections of T
i
and that of the first three
detections of T
j
Denoting T
i
’s predicted model at its rear end as
,| | 1
i
iT
r
and T
j
’s predicted model at its front end as r
j, 0
,
P
local_motion
(T
i
, T
j
) is calculated by the average
intersection ratios of the predicted model and the
corresponding detection.
2.3.2 Local Data Association
For each frame f, we apply the Hungarian algorithm
on the resulting link probability matrix to obtain the
tracklets correspondence. As the correspondence is
only calculated locally, we cannot accept all the
correspondences but only those reliable ones.
Therefore, we firstly accept the links with high
reliability using the two-threshold strategy; we then
accept the correspondences with relatively high link
probability and at the same time the tracklets
contained are not linkable to any other tracklet that
is not involved in any correspondences. The latter
condition ensures that the accepted correspondences
introduce no controversial association.
2.3.3 Missed Detection Recovery
In addition to the accepted correspondences, there is
another situation we can deal with, i.e. if a tracklet
has one end detection updated but is not linkable to
any other tracklet, while that end is not at the image
border or in the scene occluder areas, we are sure
that the corresponding object is missing. In this case,
we use the procedure stated in Section 2.2.2 to detect
the missed object, with the difference being that we
only have the predicted position. To avoid drifting,
we accept the detection only if it has a high
appearance affinity to the reference model, the shape
matching score is high and it does not overlap
significantly with other existed detections in the
frame. Figure 4 shows an example of recovered
missed detections.
After the local association, reliable temporal
information can be propagated again, and new
association can be made when more detections have
been updated. The iteration continues until there are
no new detection updates or local data associations.
2.4 Global Data Association
usingthe Hungarian Algorithm
When no further update or association can be
made, we resort to the global Hungarian tracklets
RobustMulti-HumanTrackingbyDetectionUpdateusingReliableTemporalInformation
391

(a) (b)
Figure 4: Illustration of the result of tracklet extension. (a)
The single frame detection result; (b) the detections
recovered by our approach.
association, where gaps are allowed between
associated tracklets.
2.4.1 Global Affinity Definition
The global link probability is defined as
P
link_local
(T
i
, T
j
)= P
app
(T
i
, T
j
)P
gap
(T
i
, T
j
) P
temporal
(T
i
, T
j
).
(9)
P
app
(T
i
, T
j
) is the same as the one defined in Eqt.(8).
For the motion link probability P
global_motion
(T
i
, T
j
), a
constant velocity assumption was usually made.
However, in real complex situations where people
have frequent interactions, we cannot expect that
every person keeps a constant velocity. Therefore,
we use P
global_motion
to exclude impossible
connections and put more emphasis on the
appearance affinity. Specifically, for any two
tracklets T
i
and T
j
, if
,| | ,1 ,1 ,| |
()
ii
iT j j iT max
f
fd zz
,
P
global_motion
(T
i
, T
j
) is set to be 0, where d
max
is the
maximum distance that can be traversed by a human
object in one time step (1 meter in our experiment).
Otherwise, we consider the similarity between the
end orientation
,|
|
and the start orientation
,
when calculating the motion link probability
_,1
,
(, ) (1 )max(0, , )
i
global motion i j j
iT
PTT
oo
,
(10)
where, δ controls the importance of P
global_motion
in
P
link_global
and is set to be 0.9.
P
gap
(T
i
, T
j
) measures how well the gap between T
i
and T
j
can be explained and it is defined as
,1 , | |
1
,
1
(, ) ()
jiT
i
ff
ij
gap i j gap
k
PTT p k
,
(11)
where
,
()
ij
gap
p
k
calculates how likely the detection at
the k
th
position in the gap is a missed detection. To
do this, we first linearly interpolate the real world
positions within the gap. Then, for the k
th
interpolated position, we check if it is occluded by
other detections for more than 50%; if it is, this is
taken as a missed detection and
,
is set to be the
missed detection rate p
miss
, penalizing the missed
detection. Otherwise, we check the upper body
appearance of the predicted model at this position: If
the appearance is
similar to both
,|
|
and
,
,
,
is set to p
miss
as well; Otherwise,
,
is
set to η (<< p
miss
), meaning that that gap position
cannot be explained by a missed detection and thus
it is given a much larger penalty.
2.4.2 Global Data Association
Having P
link_global
for each tracklet pair, the tracklets
association problem is formulated as a MAP
problem as proposed in Huang, 2008, which
considers track initialization, termination, tracklet
association and the probability of tracklets being
false alarms. The convergence is guaranteed by
reducing the initialization and termination
probabilities of each track after each iteration until
they reach a predefined lower bound. Figure 5
illustrates an example of the associated tracklets in
the global data association step.
The difference in our approach is that we
specifically deal with the ambiguous tracklets that
may violate the 1
st
-order Markov chain assumption
and thus are likely to introduce identity switches.
We consider a tracklet as an ambiguous tracklet
when it is linkable to two tracklets at the same end.
This type of tracklets usually appears when there are
missed detections. In addition, the degenerate
tracklets (i.e. tracklets consist of one detection) are
also considered ambiguous because they tend to
introduce identity switches due to the lack of motion
information.
(a)
(b)
Figure 5: Wrong association (red lines) caused by
ambiguous tracklets (red dots). Green dots represents the
detections of one human; blue dots represents the
detections of another human; red dots represent detections
where occlusion happens and ambiguous tracklets are
produced. (a) An ambiguous tracklet linkable to two
tracklets at each end; (b) two degenerate tracklets that lack
motion information.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
392

To approximate 2
nd
-order Markov chain on the
ambiguous tracklets, given the Hungarian
association results, we only accept the connection of
an ambiguous tracklet at the end with the higher link
probability than the other end. The connection of the
other end is left for association in the following
iterations, when there may be fewer ambiguities
(e.g. detection update might have been performed to
correct the detections or retrieve the missed
detections, or the appearance model may have been
updated, or the degenerate tracklet has linked to
another tracklet and hence contains motion
information).
After the global Hungarian matching, new links
may have been established and we can go on
performing detection update and local tracklet
linking. The iterative process ends when no new
links can be found using the global Hungarian
association.
2.5 Recovery from Identity Switches
Identity switch may exist in the original tracklets,
which are usually caused by occlusions where
accurate detection is difficult. Within the proposed
association framework, as the detection update
proceeds, the renewed detection may deviate from
the original detection farther and farther away due to
the guidance of the reliable temporal information.
When the deviation becomes very significant, i.e.
the intersection ratio between the updated detection
and the original detection is quite small or the
appearance affinity between them is not high
enough, we doubt that there may be something
inconsistent. In this situation, we break up the
tracklet at that point and look for possible better
association for the resulting two separated tracklets.
3 EXPERIMENTAL RESULTS
In this section, we demonstrate the performance of
our proposed approach on two public data sets,
namely the CAVIAR data set and the PETS 2009
data set, which have been widely used for testing the
performance of multi-target tracking works.
In our experiment, parameters not specified
manually are learned through 90 ground truth
trajectories of a video captured by ourselves where
mutual occlusion happens frequently, and these
parameters are set exactly the same for both tested
data sets.
To determine whether a target is being tracked,
the commonly used PASCAL criterion, i.e. the
intersection over union greater than 0.5 is adopted
for all the experiments.
For quantitative evaluation of the proposed
approach, we follow the currently most widely
accepted protocol, the CLEAR MOT metrics
(Stiefelhagen, 2006): The Multi-Object Tracking
Accuracy (MOTA) combines three types of errors –
false positives (FP), missed targets (FN), and
identity switches (IDs) – and is normalized such that
the score of 100% corresponds to no errors (all three
error types are weighted equally in our evaluation);
The Multi-Object Tracking Precision (MOTP)
measures the alignment of the tracker output w.r.t.
the ground truth. We also report recall, precision,
False alarm per Frame (Fa/F), as well as Mostly Lost
(ML), Partially Tracked (PT), and Mostly Tracked
(MT) scores, and the number of identity switches
(IDs) and fragmentations (Frag) of the produced
trajectories compared with ground truth trajectories
according to Li, 2009.
Two state-of-the-art tracklet based data
association approaches Kuo, 2011 and Yang, 2012
are selected for comparison. In Kuo, 2011, a robust
appearance model is learned for each target
(PRIMPT), and in Yang, 2012, both appearance
models and motion patterns are learned
(NLMPRAM). For fair comparison, the detections,
ground truth and the evaluation tool are downloaded
from the homepage of the first author of Yang, 2012
(http://iris.usc.edu/people/yangbo/downloads.html).
3.1 Performance on the CAVIAR Data
Set
As the proposed approach requires additional
computational time to perform detection update and
missed detection recovery, to reduce the run time,
for the CAVIAR data set, we sample 1 frame out of
every 10 frames from the video sequences for
tracking, i.e. the frame rate of the input to the
tracking approach is 2.5f/s.
20 sequences of the CAVIAR data set have been
evaluated as is done in Kuo, 2011 and Yang, 2012,
and Table 1 lists the comparison of the results. It can
be seen that our approach outperforms Kuo, 2011
and Yang, 2012 in terms of recall, precision, number
of mostly lost tracks and identity switches. However,
the number of fragmentations of our approach is
higher than both Kuo, 2011 and Yang, 2012. Figure
6 (a) illustrates the tracking result of our approach
on CAIVAR data set.
RobustMulti-HumanTrackingbyDetectionUpdateusingReliableTemporalInformation
393

Table 1: Comparison of results on CAVIAR data set.
Method
Recall Precision Fa/F GT MT PT ML Frag IDs
PRIMPT [35] 88.1 96.6 0.082 143 86.0% 13.3% 0.7% 17 4
NLMPRAM [36] 90.2 96.1 0.095 147 89.1% 10.2% 0.7% 11 5
Our approach 91.7 97.9 0.051 147 88.4% 11.6% 0.0% 19 3
Table 2: Comparison of results on PETS 2009 S2L1 data set.
Method
Recall Precision Fa/F GT MT PT ML Frag IDs
PRIMPT [35] 89.5% 99.6% 0.020 19 78.9% 21.1% 0.0% 23 1
NLMPRAM [36] 91.8% 99.0% 0.053 19 89.5% 10.5% 0.0% 9 0
Our approach 95.8% 99.8% 0.013 19 94.7% 5.3% 0.0% 21 0
3.2 Performance on the PETS 2009
Data Set
For the PETS 2009 data set, as the sequence was
recorded in a low frame rate (7f/s), we did not
perform sampling. The comparison result is shown
in Table 2. We can see that the recall rate and
portion of mostly tracked trajectories have been
substantially improved by our approach. However,
the number of fragmentations of our approach is still
high. Figure 6 (b) shows the tracking result of our
approach on PETS 2009 data set.
The high number of fragmentations of our
approach is mainly caused by the applied part-based
appearance model, for which inaccurate
segmentation, which occurs frequently at the spatial
temporal locations where occlusion exists, will result
in low appearance affinity. In addition, as the
appearance model is based on color histogram, it has
relatively low discriminability. These two reasons
make our approach difficult to deal with some very
ambiguous situations. To reduce the possibility of
identity switches, a conservative strategy is applied
in our approach: if the link probability is low (i.e.
the association is likely to introduce identity
switches), we choose to discard the association, thus
resulting in more fragmentations. We expect that
this problem can be much alleviated if more features
are used in addition to colors, and discriminative
training of appearance models is applied.
3.3 Computational Cost Analysis
Our approach is currently realized using MATLAB
and implemented on an Intel Corei7 2.93GHz CPU.
Most of the computational time is spent on the
detection update, which depends on the
computational time for each detection update and the
total number of detections that need to be updated.
For each detection update, usually two times of
search for the head position are needed (one for the
predicted position and one for the detected position)
and the computational time is 1-2 seconds, where the
optimal orientation and size are searched within a
small neighborhood of the expected orientation o
0
and size s
0
. Then given the head position, the
optimal model is selected, where, except for the
optimal orientation and size, the leg pose is also
searched using the hierarchical model matching as
introduced in Wang, 2012. This step usually takes 2-
4 seconds. The total number of detection updates
depends on the density of the crowd, which is hard
to tell, and its upper bound is the total number of
human objects in all frames.
The whole association process terminates within
10 iterations for all the tested sequences: for the first
several iterations, there are both detection update
and local and global tracklet associations; for the
remaining iterations, as no detections can be update
anymore, only global associations take place.
4 CONCLUSIONS
In this paper, we propose a hierarchical data
association approach that performs detection update
using reliable temporal information to improve the
accuracy of tracklet quantities. Comparison with two
state-of-the-art approaches demonstrates the
effectiveness of the proposed approach.
Our future work includes introducing
discriminatively trained affinity and appearance
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
394
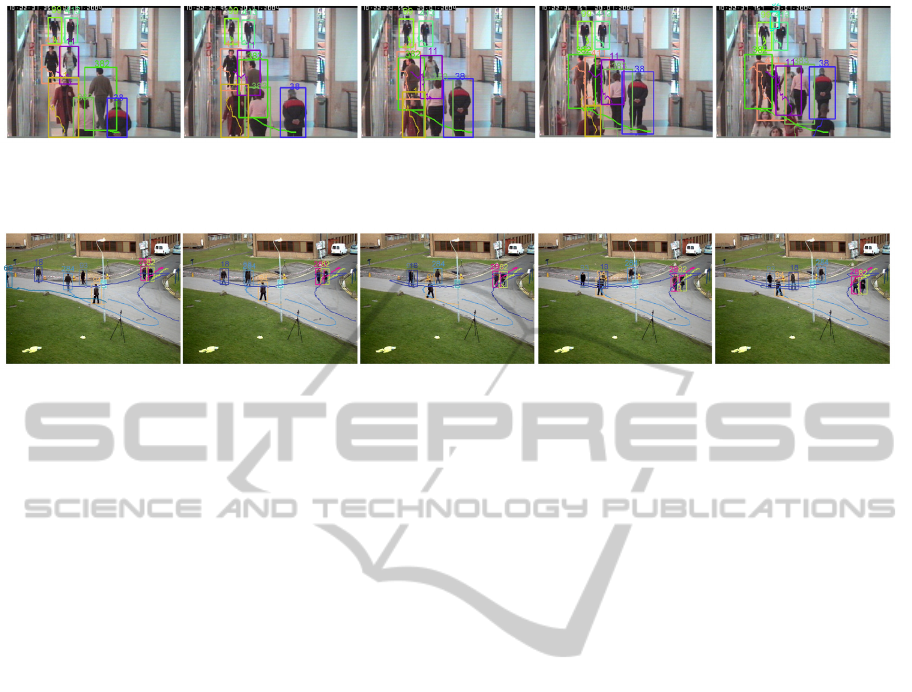
frame 180 frame 220 frame 260 frame 300 frame 340
(a)
frame 285 frame 295 frame 305 frame 315 frame 325
(b)
Figure 6: Illustration of tracking results. (a) CAVIAR data set; (b) PETS 2009 data set.
models into the proposed framework so that
fragmentations of the tracking results can be reduced
significantly. In addition, our approach can be also
improved by exploiting high level scene
understanding ability to resolve more ambiguities,
e.g. scene occluder detection by either specifically
detecting certain commonly seen occluders such as
trees and pillars or statistical analysis of the
obtained trajectories.
ACKNOWLEDGEMENTS
This work is supported by National Natural Science
Foundation of China 61202258, Fundamental
Research Funds for the Central Universities of China
N100204001, and National Science and Technology
Support Program of China 2013BAK02B01-02.
REFERENCES
Breitenstein, M. D., Reichlin, F., Leibe, B., Koller-Meier,
E., Van Gool, L., 2011. Online multiperson tracking-
by-detection from a single, uncalibrated camera. IEEE
Transactions on Pattern Analysis and Machine
Intelligence, vol. 33(9), pp. 1820-1833.
Comaniciu, D., Ramesh, V., Meer P., 2003. Kernel-based
object tracking. IEEE Transactions on Pattern
Aanlysis and Machine Intelligence, vol. 25(5) (pp.
564-575.
Huang, C., Wu, B., Nevatia, R., 2008. Robust object
tracking by hierarchical association of detection
responses. In Proceedings of European Conference on
Computer Vision, pp. 788-801.
Kuo, C.-H., Huang. C., Nevatia, R., 2010. Multi-target
tracking by on-line learned discriminative appearance
models. In Proceedings of IEEE Conference on
Computer Vision and Pattern Recognition, pp. 685-
692.
Kuo, C.-H., Nevatia, R., 2011. How does person identity
recognition help multi-person tracking?. In
Proceedings of IEEE Conference on Computer Vision
and Pattern Recognition, pp. 1217-1224.
Li, Y., Huang, C., and Nevatia, R., 2009. Learning to
associate: hybridboosted multi-target tracker for
crowded scene. In Proceedings of IEEE Conference on
Computer Vision and Pattern Recognition, pp. 2953-
2960.
Munkres, J., 1957. Algorithms for the assignment and
transportation problems. Journal of the Society for
Industrial and Applied Mathematics, vol. 5(1), pp. 32-
38.
Perera A., Srinivas C., Hoogs A., Brooksby G., and Hu
W., 2006. Multi-object tracking through simultaneous
long occlusions and split-merge conditions. In
Proceedings of IEEE Conference on Computer Vision
and Pattern Recognition, pp. 666-673.
Rasmussen, C., Hager, G. D., 2001. Probabilistic data
association methods for tracking complex visual
objects. IEEE Transactions on Pattern Analysis and
Machine Intelligence, vol. 23(6), pp. 560-576.
Stauffer C., 2003, Estimating tracking sources and sinks.
In Proceedings of Computer Vision and Pattern
Recognition Workshop, pp. 35.
Stiefelhagen, R., Bernardin, K., Bowers, R., Garofolo, J.
S., Mostefa, D., Soundararajan, P., 2006. The CLEAR
2006 valuation. In CLEAR, 2006.
Wang, L., Yung, N., 2012. Three-dimensional model
based human detection in crowded scenes. IEEE
Transactions on Intelligent Transportation Systems,
vol. 13(2), pp. 691-703.
Wang, X., Hua, G., Han, T., 2010. Discriminative
RobustMulti-HumanTrackingbyDetectionUpdateusingReliableTemporalInformation
395

Tracking by Metric Learning. In Proceedings of
European Conference on Computer Vision, pp. 200-
214.
Wu, B., Nevatia, R. 2007. Detection and tracking of
multiple, partially occluded humans by Bayesian
combination of edgelet based part detectors.
International Journal of Computer Vision, vol. 75(2),
pp. 247-266.
Yang, B., Nevatia, R., 2012. Multi-target tracking by
online learning of non-linear motion patterns and
robust appearance models. In Proceedings of IEEE
Conference on Computer Vision and Pattern
Recognition, pp. 1918-1925.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
396
