
Fall Detection using Ceiling-mounted 3D Depth Camera
Michal Kepski
2
and Bogdan Kwolek
1
1
AGH University of Science and Technology, 30 Mickiewicza Av., 30-059 Krakow, Poland
2
University of Rzeszow, 16c Rejtana Av., 35-959 Rzesz´ow, Poland
Keywords:
Video Surveillance and Event Detection, Event and Human Activity Recognition.
Abstract:
This paper proposes an algorithm for fall detection using a ceiling-mounted 3D depth camera. The lying pose
is separated from common daily activities by a k-NN classifier, which was trained on features expressing head-
floor distance, person area and shape’s major length to width. In order to distinguish between intentional lying
postures and accidental falls the algorithm also employs motion between static postures. The experimental
validation of the algorithm was conducted on realistic depth image sequences of daily activities and simulated
falls. It was evaluated on more than 45000 depth images and gave 0% error. To reduce the processing overload
an accelerometer was used to indicate the potential impact of the person and to start an analysis of depth
images.
1 INTRODUCTION
The aim of behavior recognition is an automated anal-
ysis (or interpretation) of ongoing events and their
context from the observations. Behavior understand-
ing aims at analyzing and recognizing motion patterns
in order to produce high-level description of actions.
Currently, human behavior understanding is becom-
ing one of the most active and extensive research top-
ics of artificial intelligence and cognitive sciences.
The strong interest is driven by broad spectrum of
applications in several areas such as visual surveil-
lance, human-machine-interaction and augmented re-
ality. However, this problem is very difficult be-
cause of wide range of activities, which can occur
in any given context and the considerable variabil-
ity within particular activities, taking place at differ-
ent time scales. Despite its difficulty, there has been
made a considerable progress in developing methods
and models to improve understanding of human be-
havior. The current research concentrates more on
natural settings and moves from generic techniques
to specific scenarios and applications (Pantic et al.,
2006; Weinland et al., 2011).
One aspect of human behavior understanding is
recognition and monitoring of activities of daily liv-
ing (ADLs). Several methods were proposed to dis-
tinguish between activities of daily living and falls
(Noury et al., 2008). Falls are a major health risk
and a significant obstacle to independent living of the
seniors (Marshall et al., 2005) and therefore signifi-
cant effort has been devoted to ensuring user-friendly
assistive devices (Mubashir et al., 2013). However,
despite many efforts made to obtain reliable and un-
obtrusive fall detection, current technology does not
meet the seniors’ needs. One of the main reasons
for non-acceptance of the currently available technol-
ogy by elderly is that the existing devices generate
too much false alarms. This means that some daily
activities are erroneously reported as falls, which in
turn leads to considerable frustration of the seniors.
Additionally, the existing devices do not preserve the
privacy and unobtrusiveness adequately.
Most of the currently available techniques for fall
detection are based on wearable sensors. Accelerom-
eters or both accelerometers and gyroscopes are the
most frequently used sensors in wearable devices for
fall monitoring (Noury et al., 2007). However, on
the basis of inertial sensors it is hard to separate real
falls from fall-like activities (Bourke et al., 2007).
The reason is that the characteristic motion patterns
of fall also exist in many ADLs. For instance, the
squat or crouch also demonstrate a rapid downward
motion and in consequence the devices that are only
built on inertial sensors frequently trigger false alarms
for such simple action. Thus, a lot of research was
devoted to detecting of falls using various sensors.
Mubashir et al. (Mubashir et al., 2013) done a sur-
vey of methods used in the existing fall detection sys-
tems. Single CCD camera (Rougier et al., 2006),
640
Kepski M. and Kwolek B..
Fall Detection using Ceiling-mounted 3D Depth Camera.
DOI: 10.5220/0004742406400647
In Proceedings of the 9th International Conference on Computer Vision Theory and Applications (VISAPP-2014), pages 640-647
ISBN: 978-989-758-004-8
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

multiple cameras (Aghajan et al., 2008), specialized
omni-directional ones (Miaou et al., 2006) and stereo-
pair cameras (Jansen and Deklerck, 2006) were inves-
tigated in vision systems for fall detection. However,
the proposed solutions require time for installation,
camera calibration and are not cheap.
Recently, Kinect sensor was used in prototype sys-
tems for fall detection (Kepski and Kwolek, 2012;
Mastorakis and Makris, 2012). It is the world’s first
low-cost device that combines an RGB camera and a
depth sensor. Unlike 2D cameras, it allows 3D track-
ing of the body movements. Thus, if only depth im-
ages are used it preserves the person’s privacy. Be-
cause depth images are extracted with the support of
an active light source, they are largely independent
of external light conditions. Thanks to the use of the
infrared light the Kinect is capable of extracting the
depth images in dark rooms.
In this work we demonstrate how to achieve re-
liable fall detection with low computational cost and
very low level of false positive alarms. A body-worn
tri-axial accelerometer is utilized to indicate a po-
tential fall (impact shock). A fall hypothesis is then
verified using a ceiling-mounted RGBD camera. We
show that the use of such a camera leads to many ad-
vantages. For ceiling-mounted RGBD cameras the
fully automatic procedure for extraction of the ground
plane (Kepski and Kwolek, 2013) can be further sim-
plified as the ground can be determined easily on the
basis of farthest subset of points cloud. Moreover, we
show that the distance to the ground of the topmost
points of the subject undergoing monitoring (head-
floor distance) allows us to ignore a lot of false pos-
itives alarms, which would be generated if only the
accelerometer is used. We show how to extract infor-
mative attributes of the human movement, which al-
lows us to achieve very high fall detection ratio with
very small ratio of false positives. To preserve the pri-
vacy of the user the method utilizes only depth images
acquired by the Kinect device.
2 FALL DETECTION USING
SINGLE INERTIAL SENSOR
A lot of different approaches have been investigated
to achieve reliable fall detection using inertial sen-
sors (Bourke et al., 2007). Usually, a single body-
worn sensor (tri-axial accelerometer or tri-axial gyro-
scope, or both embedded in an inertial measurement
unit) is used to indicate person fall. The most com-
mon method consists in using a tri-axial accelerome-
ter. At any point in time, the output of the accelerom-
eter is a linear combination of two components, that
is the acceleration component due to gravity and the
acceleration component due to bodily motion. The
first approach to fall detection using accelerometry
was done by Williams et al. (Williams et al., 1998).
The accelerometer-based algorithms simply raise the
alarm when a certain threshold value of the accelera-
tion is reached. In practice, there exist many problems
inherently connected with such kind of algorithms, in-
cluding lacking of adaptability.
After accidental fall, the individual’s body is usu-
ally in a different orientation than before the fall, and
in consequence the resting acceleration in three axes
is different from the acceleration in the pose before
the fall. In (Chen et al., 2005) an accelerometer-
based algorithm, relying on change in body orienta-
tion has been proposed. If the root sum vector of the
three squared accelerometer outputs exceeds a certain
threshold, it signals a potential fall. After detecting
the impact, the orientation change is calculated over
one second before the first impact and two seconds
after the last impact using the dot product of the ac-
celeration vectors. The angle change can be set ar-
bitrarily based on empirical data, as suggested by the
authors. However, despite many efforts to improve
this algorithm, it does not provide sufficient discrimi-
nation between real-world falls and ADLs.
In this work we assume that a fall took place if the
signal upper peak value (UPV) from the accelerome-
ter is greater than 2.5g. We investigated also the use-
fulness of the orientation change for different thresh-
olds. However, the potential of this attribute seems
to be small, particularly in actions consisting in low-
ering the body closer to the ground by bending the
knees, for instance while taking or putting the ob-
ject from the floor. A review of the relevant literature
demonstrates that for a single inertial device the most
valuable information can be obtained if the device is
attached near the centre of mass of the subject. There-
fore, the accelerometer was attached near the spine on
the lower back using an elastic belt around the waist.
Compared to vision-based motion analysis sys-
tems, wearable sensors offer several advantages, par-
ticularly in terms of cost, ease of use and, most impor-
tantly, portability. Currently available smartphones
serve not only as communication and computing de-
vices, but they also come with a rich set of embedded
sensors, such as an accelerometer, gyroscope and dig-
ital compass. Therefore, they were used in prototype
systems for fall detection. However, despite many ad-
vantages, the inertial sensors-based technology does
not meet the seniors’ needs, because some activities
of daily living are erroneously reported as falls.
FallDetectionusingCeiling-mounted3DDepthCamera
641

3 FALL DETECTION USING
CEILING-MOUNTED RGBD
CAMERA
Various types of cameras were used in vision sys-
tems for fall detection (Rougier et al., 2006; Agha-
jan et al., 2008; Miaou et al., 2006; Jansen and Dek-
lerck, 2006). However, the video technology poses a
major problem of acceptance by seniors as it requires
the placement of the cameras in private living quar-
ters, and especially in the bedroom and the bathroom,
with consequent concerns about privacy. The exist-
ing systems require time for installation, camera cal-
ibration and are not cheap. Recently, Kinect sensor
was demonstrated to be very useful in fall detection
(Kepski and Kwolek, 2012; Mastorakis and Makris,
2012). In (Kepski and Kwolek, 2013) we demon-
strated an automatic method for fall detection using
Kinect sensor. The method utilizes only depth im-
ages acquired by a single device, which is placed at
height about 1 m from the floor. It determines the
parameters of the ground plane equation and then it
calculates the distance between the person’s centroid
to the ground. In contrast, in this work we employ
a ceiling-mounted Kinect sensor. In subsequent sub-
sections we demonstrate that such a placement of the
sensor has advantages and can lead to simplification
of the algorithms devoted to distinguishing the acci-
dental falls from ADLs.
3.1 Person Detection in Depth Images
Depth is very useful cue to attain reliable person de-
tection since humans may not have consistent color
and texture but have to occupy an integrated region
in space. Kinect combines structured light with two
classic computer vision techniques, namely depth
from focus and depth from stereo. It is equipped with
infrared laser-based IR emitter, an infrared camera
and a RGB camera. The IR camera and the IR projec-
tor compose a stereo pair with a baseline of approxi-
mately 75 mm. A known pattern of dots is projected
from the IR laser emitter. These specs are captured
by the IR camera and compared to the known pattern.
Since there is a distance between laser and sensor, the
images correspond to different camera positions, and
that in turn allows us to use stereo triangulation to cal-
culate each spec depth. The field of view is 57
◦
hor-
izontally and 43
◦
vertically, the minimum measure-
ment range is about 0.6 m, whereas the maximum
range is somewhere between 4-5 m. It captures the
depth and color images simultaneously at a frame rate
of about 30 fps. The RGB stream has size 640× 480
and 8-bit for each channel, whereas the depth stream
is 640× 480 resolution and with 11-bit depth.
The software called NITE from PrimeSense of-
fers skeleton tracking on the basis of RGBD images.
However, this software is targeted for supporting the
human-computerinteraction, and not for detecting the
person fall. In particular, it was developed to extract
and to track persons in front of the Kinect. There-
fore, we employ a person detection method (Kepski
and Kwolek, 2013), which with low computational
cost extracts the individual on images acquired by
a ceiling-mounted Kinect. Another rationale for us-
ing such a method is that it can delineate the per-
son in real-time on PandaBoard (Kepski and Kwolek,
2013), which is a low-power, low-cost single-board
computer development platform for mobile applica-
tions.
The person was delineated on the basis of a scene
reference image, which was extracted in advance and
then updated on-line. In the depth reference image
each pixel assumes the median value of several pix-
els values from the earlier images. In the setup phase
we collect a number of the depth images, and for each
pixel we assemble a list of the pixel values from the
former images, which is then sorted in order to ex-
tract the median. Given the sorted lists of pixels the
depth reference image can be updated quickly by re-
moving the oldest pixels and updating the sorted lists
with the pixels from the current depth image and then
extracting the median value. We found that for typical
human motions, good results can be obtained using 13
depth images (Kepski and Kwolek, 2013). For Kinect
acquiring the images at 25 Hz we take every fifteenth
image.
In the detection mode the foreground objects are
extracted through differencing the current depth im-
age from such a depth reference map. Afterwards,
the person is delineated through extracting the largest
connected component in the thresholded difference
between the current depth map and the reference map.
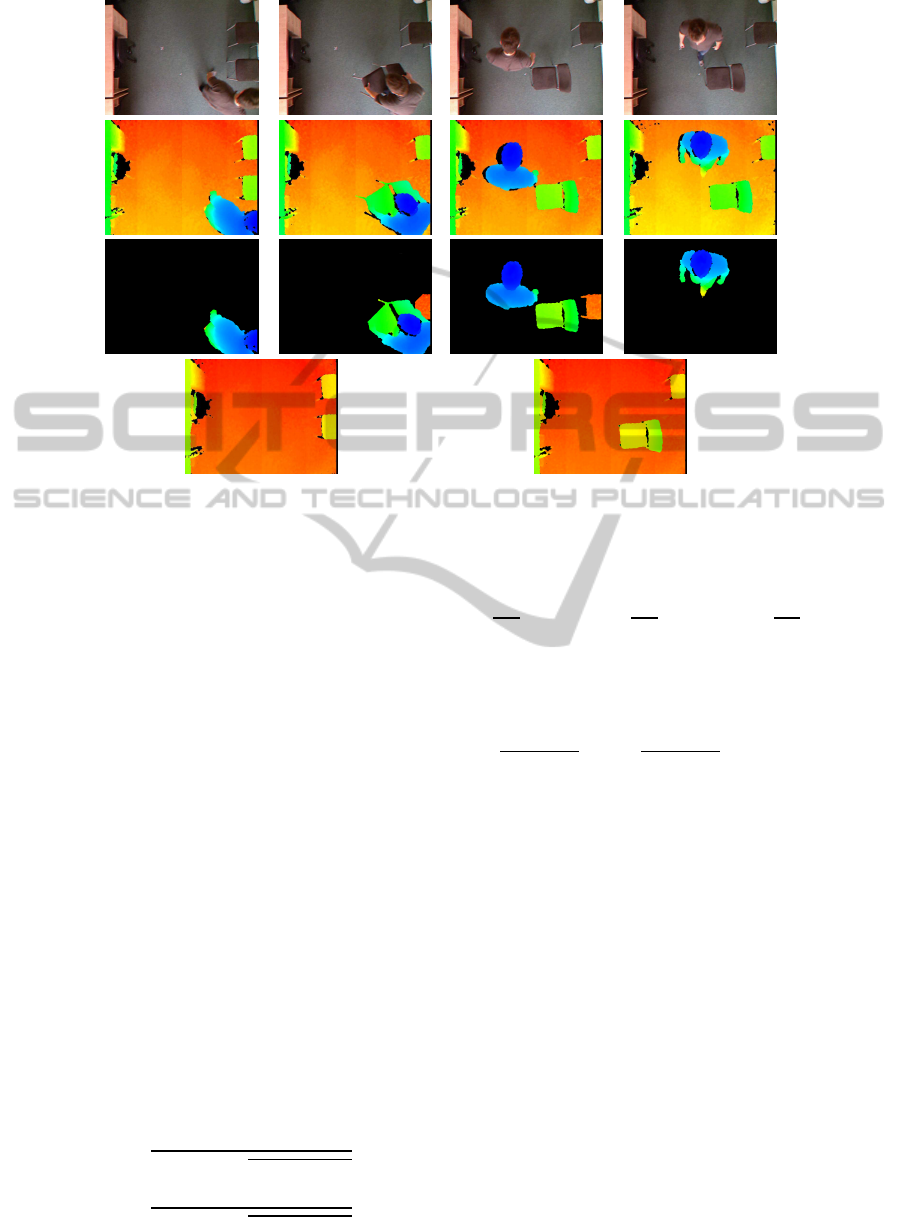
Figure 1 illustrates extraction of the person us-
ing the updated depth reference image of the scene.
In the first and the second row are depicted exam-
ple color images and their corresponding depth im-
ages, in the third row are shown the difference im-
ages between the depth images and the depth refer-
ence images, which are shown in the last row. As we
can observe, if the layout of the scene changes, for
instance due to the shift a chair to another location,
see Fig. 1 b,f, the depth difference images temporally
contain not only the person, but also the shifted ob-
ject, see Fig. 1 j,k. As we can observe in the sub-
sequent frames, on the basis of the refreshed depth-
reference image, see also Fig. 1 n), which now con-
tains the moved chair, the algorithm extracts only the
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
642
a) b) c) d)
e) f)
g)
h)
i)
j)
k) l)
m) n)
Figure 1: Extraction of the person on the basis of the updated depth reference image. Input images a-d), corresponding depth
images e-h), difference between depth images and depth-reference images i-l), updated on-line depth-reference images m-n).
person undergoing monitoring, see Fig. 1 l.
3.2 Lying Pose Recognition
The recognition of lying pose has been achieved us-
ing a classier trained on features representing the ex-
tracted person in the depth images. A data-set con-
sisting of images with normal activities like walking,
taking or putting an object from floor, bending right
or left to lift an object, sitting, tying laces, crouching
down and lying has been composed in order to train
classifiers responsible for checking whether a person
is lying on the floor. Thirty volunteers with age un-
der 28 years attended in preparation of the data-set.
In total 100 images representing typical activities of
daily living were selected and then utilized to extract
the features.
In most vision-based algorithms for lying pose
recognition the ratio of height to width of the rect-
angle surrounding the subject is utilized. In contrast,
in our algorithm we employ the ratio of major length
to major width, which is calculated on the basis of
the binary image I representing the person undergoing
monitoring. The major length and width (eigenval-
ues) were calculated in the following manner (Horn,
1986):
l = 0.707
r
(a+ c) +
q
b
2
+ (a− c)
2
w = 0.707
r
(a+ c) −
q
b
2
+ (a− c)
2
(1)
where
a =
M
20
M
00
− x
2
c
, b = 2(
M
11
M
00
− x
c
y
c
), c =
M
02
M
00
− y
2
c
,
M
00
=
∑
x
∑
y
I(x,y), M
11
=
∑
x
∑
y
xyI(x,y),
M
20
=
∑
x
∑
y
x
2
I(x,y), M
02
=
∑
x
∑
y
y
2
I(x,y),
whereas x
c
,y
c
were computed as follows:
x
c
=
∑
x
∑
y
xI(x,y)
∑
x
∑
y
I(x,y)
, y
c
=
∑
x
∑
y
yI(x,y)
∑
x
∑
y
I(x,y)
.
In total, we utilized three features:
• H/H
max
- a ratio of head-floor distance to the
height of the person
• area - a ratio expressing the person’s area in the
image to the area at assumed distance to the cam-
era
• l/w - a ratio of major length to major width, cal-
culated on the basis of (1).
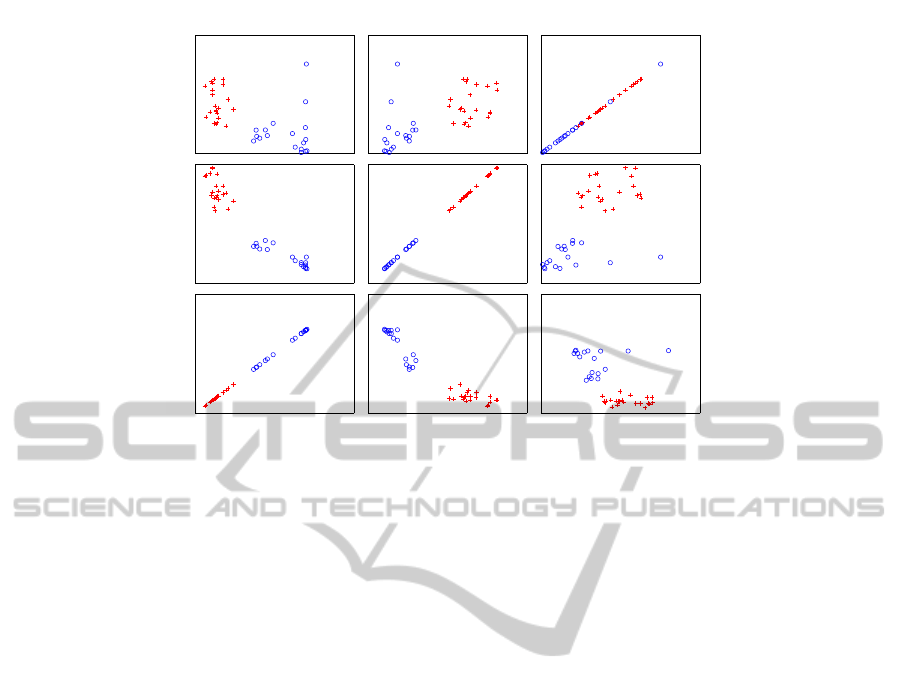
Figure 2 depicts a scatter plot matrix for the employed
attributes, in which a collection of the scatter plots
is organized in a two-dimensional matrix simultane-
ously to provide correlation information among the
attributes. In a single scatter plot two attributes are
projected along the x-y axes of the Cartesian coordi-
nates. As we can observe on the discussed plots, the
overlaps in the attribute space are not too significant.
We considered also another attributes, for instance, a
filling ratio of the rectangles making up the person’s
bounding box. The worth of the considered features
FallDetectionusingCeiling-mounted3DDepthCamera
643
l/w
H/H
max
area l/w
area
H/H
max
Figure 2: Multivariate classification scatter plot for features used in lying pose recognition.
was evaluated on the basis of the information gain
(Cover and Thomas, 1992), which measures the de-
pendence between the feature and the class label. In
assessment of the discrimination power of the consid-
ered features and selecting most discriminative ones
we used
InfoGainAttributeEval
function from the
Weka (Cover and Thomas, 2005). The features se-
lected in such a way were then utilized to train classi-
fiers responsible for distinguishing between daily ac-
tivities and accidental falls.
3.3 Dynamic Transitions for Fall
Detection
In the previous subsection we demonstrated how to
detect a fall on the basis of lying pose recognition,
through analysis the content of single depth image.
However, the human fall is a dynamic process, which
arises in relatively short time. The relevant liter-
ature suggests that the fall incident takes approxi-
mately 0.4 s to 0.8 s. During a person fall there is
an abrupt change of head-floor distance with accom-
panying change from a vertical orientation to a hori-
zontal one. The distance of the person’s centroid to
the floor also changes significantly and rapidly during
the accidental fall. Thus, depth image sequences can
be used to extract features expressing motion patterns
of falls. Using depth image sequences we can charac-
terize the motion between static postures, and in par-
ticular between the pose before the fall and the lying
pose. In particular, motion information allows us to
determine whether a transition of the body posture or
orientation is intentional or not.
In the depth image sequences with ADLs as well
as person falls we analyzed the feature ratios H/H
max
,
area and l/w, and particularly their sudden changes
that arise during falling, e.g. from standing to ly-
ing. To reduce the ratio of false positive alarm of
the system relying only on features extracted in a sin-
gle depth image, we introduced a feature reflecting
change of the H/H
max
over time. That means that
aside from the static postures our algorithm also em-
ploys information from dynamic transitions, i.e. mo-
tions between static postures. In particular, this allows
us to distinguish between intentional lying postures
and accidental falls. Our experimental results show
that the ratio of H(t)/H(t − 1) for H(t) determined
in the moment of the impact and H(t − 1) determined
one second before the fall is very useful to distinguish
the fall from many common ADLs. Figure 3 depicts
change over time of the discussed features for typi-
cal activities, consisting in walking, crouching down,
knelling down, sitting, bending, standing and falling.
A peak in walking phase that is seen in the plot of
H/H
max
is due to a raise of the hand. As we can
observe, for ceiling mounted camera the area ratio
changes considerably in the case of the fall. In the
case of a person fall, the peak value of H(t)/H(t − 1)
is far below one.
The ratio H(t)/H(t − 1) can be determined using
only vision-based techniques, i.e. through analysis of
pairs of depth images. The Kinect microphones can
be used to support the estimation of the moment of
the person impact. Inertial sensors are particularly at-
tractive for such a task because currently they are em-
bedded in many smart devices. With the help of such
fall indicators the value H(t) can be computed at low
computational cost.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
644
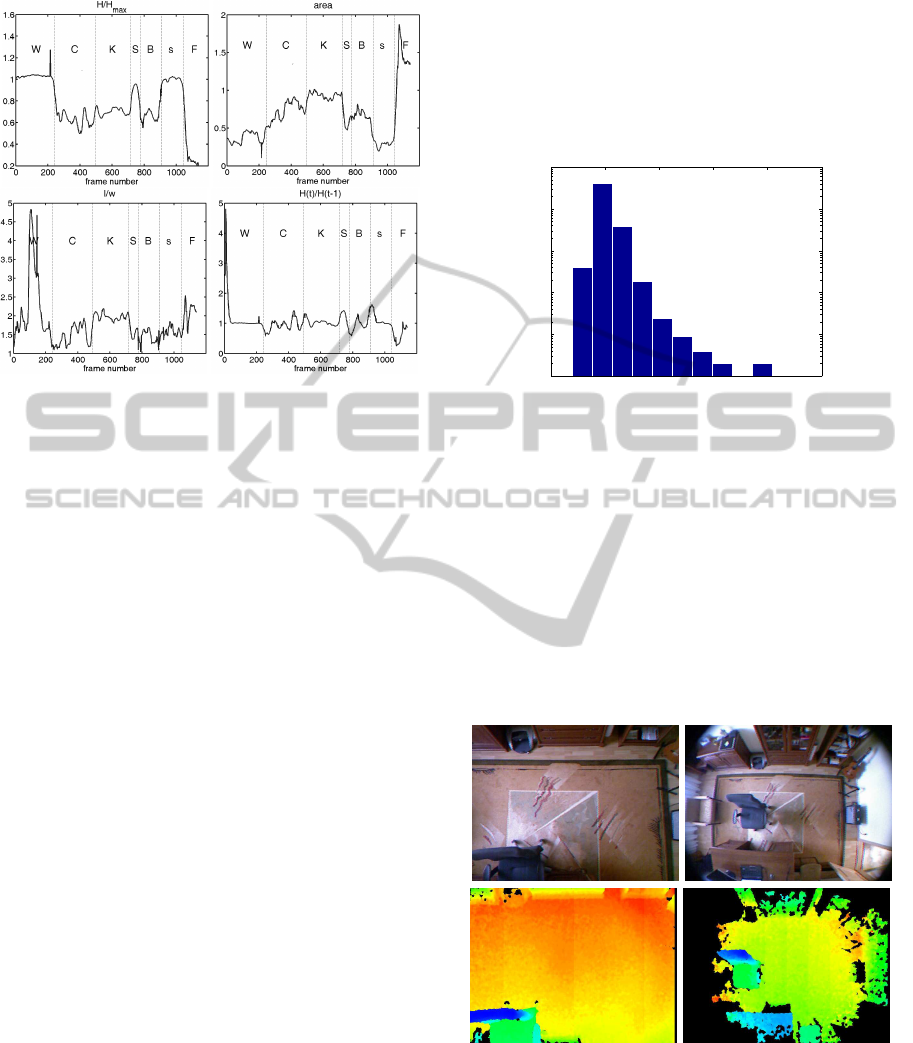
Figure 3: Curves of feature change during the ADLs and
falls. W-walking, C-crouching down, K-knelling down, S-
sitting, B-bending, s-standing, F-falling.
4 EXPERIMENTAL RESULTS
At the beginning of the experimental validation of the
proposed algorithm we assessed the usefulness of an
accelerometer as an indicator of potential fall. The
actors performed common daily activities consisting
in walking, taking or putting an object from floor,
bending right or left to lift an object, sitting, tying
laces, crouching down and lying. The accelerome-
ter was worn near the spine on the lower back us-
ing an elastic belt around the waist. The motion data
were acquired by a wearable smart device (x-IMU
or Sony PlayStation Move) containing accelerometer
and gyroscope sensors. Data from the device were
transmitted wirelessly via Bluetooth and received by
a laptop computer. Figure 4 depicts the histogram of
the UPV values for the carried out activities during
half an hour experiment. As we can see, the values
2.5 − 3g were exceeded several times. This means
that within half an hour of typical person’s activity a
considerable number of false alarms would be gen-
erated if the fall detection was carried out only on
the basis of the accelerometer. In particular, we no-
ticed that all fall-like activities were indicated prop-
erly. Thus, the accelerometer can be used as reliable
indicator of the person impact. In consequence, the
computational overhead can be reduced significantly,
as the depth image analysis can only be performed
in case of signaling with low cost the potential fall.
On the other hand, the accelerometer acknowledged
its usefulness in the update of the depth reference im-
age. For that reason, for a person at rest no update
of the depth reference image is needed. Overall, the
accelerometer acknowledged its usefulness in activity
summarization. However, typical accelerometer can
be inconvenient to be worn during the sleep and this
in turn results in the lack of ability to monitor the crit-
ical phase of getting up from the bed.
0 1 2 3 4 5
10
0
10
1
10
2
10
3
10
4
10
5
UPV [m/s
2
]
Histogram of UPV values for typical ADLs
Figure 4: Histogram of UPV for typical ADLs registered
during half fan hour experiment.
The algorithm for lying pose recognition has been
evaluated in 10-fold cross-validation using features
discussed in Section 3.2. We trained k-NN, SVM,
KStar and multilayer perceptron classifiers responsi-
ble for checking whether the person is lying on the
floor. All falls were distinguished correctly. We also
trained and evaluated our fall detection algorithm on
images acquired by Kinect with Nyko zoom range re-
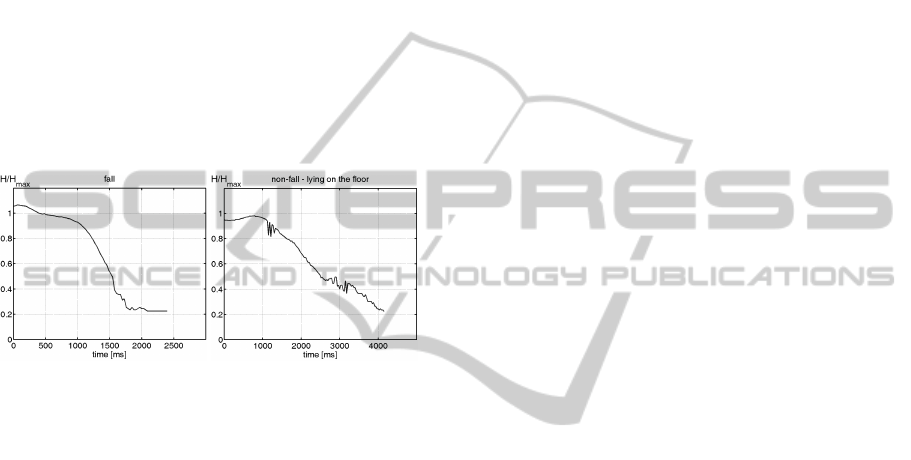
duction lens. Figure 5 illustrates the images of the
same scene, which were acquired by Kinect with and
Figure 5: The same scene seen by Kinect (left) and by
Kinect with Nyko zoom range reduction lens (right). In up-
per row are shown color images, whereas in bottom one are
corresponding depth images.
without the Nyko lens. As we can notice, owing to
the Nyko lens the monitored area is far larger. In par-
ticular, using the Kinect sensor mounted at height of
about 2.5 m it is possible to encompass and to shot
FallDetectionusingCeiling-mounted3DDepthCamera
645
the ground of the whole room. Five young volun-
teers attended in the evaluation of the algorithm for
fall detection through analysis of lying pose. For the
testing of the classifiers we selected one hundred of
images with typical human actions of which half de-
picted persons lying on the floor. It is worth noting
that in the discussed experiment all lying poses were
distinguished properly from daily activities.
Figure 6 illustrates change of H/H
max
over time
for an intentional fall and an intentional lying on the
floor. As we can observe, the time needed for ap-
proaching the value 2.5g is different, i.e. approaching
the value for which the considerable part of the body
has a contact with the floor. The discussed plot jus-
tifies the usefulness of H(t)/H(t − 1) feature in dis-
tinguishing the intentional lying on the floor from the
accidental falling.
Figure 6: Curves of H/H
max
change over time for an inten-
tional fall and lying on the floor.
The lying pose detector was evaluated by five stu-
dents. The experiments demonstrated that the algo-
rithm has very high detection ratio, slightly smaller
than 100%. However, the students found a couple of
poses that were similar to lying poses, and which were
recognized as lying poses. The use of the inertial sen-
sor as indicator of the fall reduces considerably the
possibility of false alarms of the system-based on ly-
ing pose detection at the cost of obtrusiveness.
In the next stage of the experiments we combined
the detector of lying pose with a detector using the
proposed temporal feature. Through combining the
discussed detectors we achieved reliable fall detection
with very small false alarm ratio. As expected, the
students found a small amount of daily actions, which
in some circumstances can lead to false alarm, mainly
due to imperfect detection of the moment of the body
impact on the basis of only vision techniques.
Having on regard that fall detection system should
have negligible false alarm ratio as well as low con-
sumption power, in the extended evaluation of the sys-
tem we employed an inertial sensor to sense the im-
pact, and particularly to determine more precisely the
moment at which it takes place. In response to poten-
tial fall signaled by the inertial sensor the lying pose
classifier is executed to verify if the depth image con-
tains a person in a lying pose. If yes, the classifier us-
ing the temporal feature is executed to check whether
this was a dynamical person action. In this case, the
value H(t) is calculated at the moment of the impact,
i.e. at time in which the acceleration exceeds the value
of 2.5 g.
The depth camera-based system for fall detection
has been tested using image sequences with daily
activities and simulated-falls performed by young
volunteers. Intentional falls were performed in a
room towards a carpet with thickness of about 2 cm.
A comprehensive evaluation showed that the sys-
tem has high accuracy of fall detection and very
low level (as low as 0%) of false alarms. In half
an hour experiment, in which more than 45000
depth images with fall-like activities and simulated
falls, all daily activities were distinguished from
falls like daily activities. The image sequences
with the corresponding acceleration data are available
at: http://fenix.univ.rzeszow.pl/∼mkepski/ds/uf.html.
The datasets contain 66 falls of which half of them
concerned persons falling of a chair. No false alarm
was reported and all intentional falls were indicated
appropriately. The classification was done by k-
NNs. The algorithm has also been tested in an office,
where the simulated falls were performed onto crash
mats. In a few minutes’ long video with walking, sit-
ting/standing, executed 20 times, crouching, executed
10 times, taking or putting an object from floor, re-
peated 10 times, and 20 intentional falls, all falls were
recognized correctly using only depth images.
The experimental results are very promising. In
order to be accepted by seniors, a system for fall
detection should be unobtrusive and cheap, and par-
ticularly it should have almost null false alarm ra-
tio as well as preserve privacy. The proposed algo-
rithm for fall detection was designed with regard to
factors mentioned above through careful selection of
its ingredients. In comparison to existing systems
(Mubashir et al., 2013), it has superior false alarm ra-
tio with almost perfect fall detection ratio, and meets
the requirements that should have a system to be ac-
cepted by the seniors. Moreover, due to low computa-
tional demands, the power consumption is acceptable
for seniors. Having on regard our previous imple-
mentation of a fall detection system on PandaBoard
as well as the computational demands of the current
algorithm it will be possible to implement the algo-
rithm on new PandaBoard and to execute the algo-
rithm in real-time. The advantage will be low power
consumption and easy setup of the system.
The depth images were acquired by the Kinect
sensor using OpenNI. The system was implemented
in C/C++ and runs at 30 fps on 2.4 GHz I7 (4 cores,
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
646

Hyper-Threading) notebook, powered by Windows.
For ceiling-mounted Kinect at the height of 2.6 m
from the floor the covered area is about 5.5 m
2
. With
Nyko lens the area covered by the camera is about
15.2 m
2
. The most computationally demanding op-
eration is extraction of the depth reference image of
the scene. For images of size 640× 480 the computa-
tion time needed for extraction of the depth reference
image is about 9 milliseconds.
5 CONCLUSIONS
In this work we demonstrated an approach for fall de-
tection using ceiling-mounted Kinect. The lying pose
is separated from common daily activities by a clas-
sifier, trained on features expressing head-floor dis-
tance, person area and shape’s major length to width.
To distinguish between intentional lying postures and
accidental falls the algorithm employs also motion be-
tween static postures. The experimental validation of
the algorithm that was conducted on realistic depth
image sequences of daily activities and simulated falls
shows that the algorithm allows reliable fall detection
with low false positives ratio. On more than 45000
depth images the algorithm gave 0% error. To reduce
the processing overload an accelerometer was used to
indicate the potential impact of the person and to start
analysis of depth images. The use of accelerometer
as indicator of potential fall simplifies computation of
the motion feature and increases its reliability. Ow-
ing the use only depth images the system preserves
privacy of the user and works in poor lighting condi-
tions.
ACKNOWLEDGEMENTS
This work has been supported by the National Science
Centre (NCN) within the project N N516 483240.
REFERENCES
Aghajan, H., Wu, C., and Kleihorst, R. (2008). Distributed
vision networks for human pose analysis. In Mandic,
D., Golz, M., Kuh, A., Obradovic, D., and Tanaka, T.,
editors, Signal Processing Techniques for Knowledge
Extraction and Information Fusion, pages 181–200.
Springer US.
Bourke, A., O’Brien, J., and Lyons, G. (2007). Evaluation
of a threshold-based tri-axial accelerometer fall detec-
tion algorithm. Gait & Posture, 26(2):194–199.
Chen, J., Kwong, K., Chang, D., Luk, J., and Bajcsy, R.
(2005). Wearable sensors for reliable fall detection. In
Proc. of IEEE Int. Conf. on Engineering in Medicine
and Biology Society (EMBS), pages 3551–3554.
Cover, T. M. and Thomas, J. A. (1992). Elements of Infor-
mation Theory. Wiley.
Cover, T. M. and Thomas, J. A. (2005). Data Mining: Prac-
tical machine learning tools and techniques. Morgan
Kaufmann, San Francisco, 2nd edition.
Horn, B. (1986). Robot Vision. The MIT Press, Cambridge,
MA.
Jansen, B. and Deklerck, R. (2006). Context aware inactiv-
ity recognition for visual fall detection. In Proc. IEEE
Pervasive Health Conf. and Workshops, pages 1–4.
Kepski, M. and Kwolek, B. (2012). Fall detection on em-
bedded platform using Kinect and wirelessaccelerom-
eter. In 13th Int. Conf. on Computers Helping People
with Special Needs, LNCS, vol. 7383, pages II:407–
414. Springer-Verlag.
Kepski, M. and Kwolek, B. (2013). Unobtrusive fall detec-
tion at home using kinect sensor. In Computer Anal-
ysis of Images and Patterns, volume 8047 of LNCS,
pages I:457–464. Springer Berlin Heidelberg.
Marshall, S. W., Runyan, C. W., Yang, J., Coyne-Beasley,
T., Waller, A. E., Johnson, R. M., and Perkis, D.
(2005). Prevalence of selected risk and protective fac-
tors for falls in the home. American J. of Preventive
Medicine, 8(1):95–101.
Mastorakis, G. and Makris, D.(2012). Fall detection system
using Kinect’s infrared sensor. J. of Real-Time Image
Processing, pages 1–12.
Miaou, S.-G., Sung, P.-H., and Huang, C.-Y. (2006). A
customized human fall detection system using omni-
camera images and personal information. Distributed
Diagnosis and Home Healthcare, pages 39–42.
Mubashir, M., Shao, L., and Seed, L. (2013). A survey on
fall detection: Principles and approaches. Neurocom-
puting, 100:144 – 152. Special issue: Behaviours in
video.
Noury, N., Fleury, A., Rumeau, P., Bourke, A.,
´
OLaighin,
G., Rialle, V., and Lundy, J. (2007). Fall detection -
principles and methods. In Int. Conf. of the IEEE Eng.
in Medicine and Biology Society, pages 1663–1666.
Noury, N., Rumeau, P., Bourke, A.,
´
OLaighin, G., and
Lundy, J. (2008). A proposal for the classification and
evaluation of fall detectors. IRBM, 29(6):340 – 349.
Pantic, M., Pentland, A., Nijholt, A., and Huang, T. (2006).
Human computing and machine understanding of hu-
man behavior: a survey. In Proc. of the 8th Int. Conf.
on Multimodal Interfaces, pages 239–248.
Rougier, C., Meunier, J., St-Arnaud, A., and Rousseau, J.
(2006). Monocular 3D head tracking to detect falls of
elderly people. In Int. Conf. of the IEEE Engineering
in Medicine and Biology Society, pages 6384–6387.
Weinland, D., Ronfard, R., and Boyer, E. (2011). A sur-
vey of vision-based methods for action representation,
segmentation and recognition. Comput. Vis. Image
Underst., 115:224–241.
Williams, G., Doughty, K., Cameron, K., and Bradley, D.
(1998). A smart fall and activity monitor for telecare
applications. In IEEE Int. Conf. on Engineering in
Medicine and Biology Society, pages 1151–1154.
FallDetectionusingCeiling-mounted3DDepthCamera
647
