
A Tabu Search Heuristic for the Heterogeneous Vehicle Routing Problem
on a Multi-graph
David S. W. Lai
1
and Ozgun C. Demirag
2
1
Department of Systems Engineering & Engineering Management,
The Chinese University of Hong Kong, Shatin, New Territories, Hong Kong
2
Black School of Business, Penn State Erie, The Behrend College, Erie, PA, 16563, U.S.A.
1 STAGE OF THE RESEARCH
I am currently a graduate student, under the supervi-
sion of Professor Janny Leung, at the Chinese Univer-
sity of Hong Kong. I have been working on practical
problems arising in transportation science and logis-
tics. These research projects, which integrate opti-
mization theories and practice, use mathematical pro-
gramming and metaheuristics techniques extensively.
During the first part of my Ph.D. study, we have
been working on the Shift Rostering Problem (SRP)
— the assignment of staff to shifts over a planning
horizon such that work rules are observed. SRP arises
in hospital nurse-scheduling, call center operations,
airlines, urban transportation, and supply chain indus-
tries. Effective scheduling of staff can generate con-
siderable saving where unnecessary costs due to mis-
allocation of staff to the demand are reduced. In this
project, mathematical programming exact approaches
and optimization-based heuristics were developed.
Afterwards, we investigate the Heterogeneous Ve-
hicle Routing Problem (HVRP) where a mixed fleet
of vehicles, having distinct vehicle capacities, fixed
costs and travel costs, is used to serve a set of cus-
tomers, minimizing the total costs, subject to the
service duration constraint and the capacity con-
straint. HVRP has been important in many applica-
tion fields, including transportation, logistics, manu-
facturing, service industries, etc.
Lastly, starting in 2014, we collaborate with a
public transit company in Hong Kong to work on
a real-time stochastic integrated vehicle and crew
scheduling problem. Vehicles and drivers are sched-
uled to deliver customers with stochastic travel times.
Disruptions due to uncertainties are managed. The
problem can be viewed as an integrated version of
SRP and HVRP that closely resembles a realistic sit-
uation. We are considering algorithms in disruption
management and simulation optimization.
2 OUTLINE OF OBJECTIVES
The objectives of my Ph.D. studies include
• modelling and solving shift rostering problems;
• efficient heuristics for HVRP that generates near-
optimal feasible solutions in a short time;
• modelling and solving the integrated vehicle and
crew scheduling problem with stochastic travel
times;
• efficient heuristics that repair and re-optimize dis-
rupted vehicle and crew schedules.
This paper describes a tabu search heuristic that
solves the HVRP for near-optimal solutions in a short
time.
3 RESEARCH PROBLEM
3.1 Introduction
This paper addresses the Heterogeneous Vehicle
Routing Problem (HVRP) where a mixed fleet of ve-
hicles, having distinct vehicle capacities, fixed costs
and travel costs, is used to serve a set of customers.
The problem is also known as the Mixed Fleet Vehicle
Routing Problem or the Heterogeneous Fleet Vehicle
Routing Problem. As pointed out by (Baldacci and
Mingozzi, 2009), HVRP is a generalization of sev-
eral important variants of the Vehicle Routing Prob-
lem (VRP).
We study an extended version of HVRP where
parallel arcs are allowed in the underlying graph. As
described by (Dai and Zhou, 2008) in a study of China
market, toll charges may contribute a large portion of
total transportation cost. It is necessary to consider
alternative paths connecting two cities. e.g. a cheaper
and longer path without tolls should be selected when
18
S. W. Lai D. and C. Demirag O..
A Tabu Search Heuristic for the Heterogeneous Vehicle Routing Problem on a Multi-graph.
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

time is not restrictive. The potential saving is signifi-
cant as justified by (Garaix et al., 2010).
Although there are many economic incentives for
solving HVRP, handling the problem effectively re-
mains an interesting question. It is possible to solve
HVRP to optimality only for relatively small in-
stances using mathematical programming techniques.
For larger instances, heuristics and meta-heuristics
are more effective ways for obtaining near-optimal so-
lutions. However, with the presence of parallel arcs
in the underlying graph, simple operations in many
classical heuristics and meta-heuristics often become
difficult optimisation sub-problems. Solving sub-
problems frequently would be time-consuming. Fur-
thermore, to support sensitivity analysis for decision-
making at a strategy level, large number of instances
of HVRP have to be solved quickly.
An insertion heuristic and a tabu search heuristic
are developed for obtaining good feasible solutions in
a short time.
3.2 Formulation
The HVRP we study is described below. Let G(V, E)
be a directed multigraph where V is a vertex set and E
is an arc set. Vertex v
0
∈V denotes a depot at which
all the vehicles are based. The remaining vertices rep-
resent n customers. For all customers i ∈ V \{v
0
},
there is a service time s
i
∈ R
+
and a demand d
i
∈ Z
+
to be delivered by a vehicle. Parallel arcs between two
vertices represent alternative paths connecting the two
locations.
There are heterogeneous vehicles with distinct ca-
pacities, fixed costs and travel costs. Vehicles are
categorized into types, indexed by K , so that vehi-
cles of the same type are identical. For all vehicle
types k ∈ K , let Q
k
∈ Z
+
denote the vehicle capacity,
f
k
∈ R
+
denote the fixed cost, and m
k
∈ Z
+
denote
the number of vehicles available. When a vehicle of
type k ∈ K travels through arc e ∈ E, there is a travel
cost c
k
e
∈ R
+
and a travel time t
e
∈ R
+
.
The objective is to determine the least-cost vehicle
routes subject to the following requirements.
1. every route starts and ends at the depot;
2. every customer is visited exactly once by exactly
one vehicle;
3. the total demand of any vehicle route of type k
may not exceed the vehicle capacity Q
k
;
4. all vehicles should return to the depot within a
time limit L;
5. the number of type-k vehicles in use should not
exceed the vehicles available m
k
.
All problem parameters are assumed to be known
with certainty. Moreover, arcs represent non-
dominated paths only, since paths with a higher cost
and a higher travel time can be ignored.
We formulate HVRP as a mixed integer linear pro-
gramming model.
For all arc e ∈ E and vehicle type k ∈K , let
x
k
e
=
(
1, if a vehicle of type k travels on arc e;
0, otherwise.
For all i, j ∈V with i 6= j, let y
i j
∈R
+
denote the total
demand delivered when the vehicle leaves customer i
to serve customer j; Similarly, let w
i j
∈R
+
denote the
cumulative service and travel time when the vehicle
leaves customer i to serve customer j. When there is
no vehicle travelling from i to j, both y
i j
and w
i j
are
set to 0.
For notational simplicity, let E
i j
⊂ E denote the
set of arcs that incident from vertex i to vertex j;
δ
+
(i) ⊂ E denote the arcs that incident from vertex
i; and δ
−
(i) ⊂ E denote the arcs that incident to ver-
tex i. Furthermore, the depot demand d
v
0
and service
time s
v
0
are both set to zero.
The problem is formulated as the following mixed
integer programming model.
min
∑
k∈K
f
k
∑
e∈δ
+
(v
0
)
x
k
e
+
∑
k∈K
∑
e∈E
c
k
e
x
k
e
, (1)
s.t.
∑
k∈K
∑
e∈δ
+
(i)
x
k
e
= 1,∀i ∈V \{v
0
}, (2)
∑
e∈δ
+
(i)
x
k
e
−
∑
e∈δ
−
(i)
x
k
e
= 0,∀k ∈ K ,i ∈V, (3)
∑
e∈δ
+
(v
0
)
x
k
e
≤ m
k
,∀k ∈ K , (4)
∑
j∈V: j6=i
y
i j
−
∑
j∈V: j6=i
y
ji
= d
i
,∀i ∈V \{v
0
}, (5)
y
i j
≤
∑
k∈K
∑
e∈E
i j
(Q
k
−d
j
)x
k
e
,∀i, j ∈V : i 6= j, (6)
∑
j∈V: j6=i
w
i j
−
∑
j∈V: j6=i
w
ji
= s
i
+
∑
k∈K
∑
e∈δ
−
(i)
t
e
x
k
e
,∀i ∈V \{v
0
}, (7)
w
i j
≤
∑
k∈K
∑
e∈E
i j
(L −s
j
−t
e
)x
k
e
,∀i, j ∈V : i 6= j,
(8)
w
i j
∈ R
+
,∀i, j ∈V : i 6= j, (9)
y
i j
∈ R
+
,∀i, j ∈V : i 6= j, (10)
x
k
e
∈ {0,1},∀e ∈ E,k ∈ K . (11)
There are |E||K | binary variables and 2|V |
2
non-
negative continuous variables. The objective is to
ATabuSearchHeuristicfortheHeterogeneousVehicleRoutingProblemonaMulti-graph
19

minimize the total fixed costs and travel costs. Con-
straints (2) ensure that every customer is visited ex-
actly once by exactly one vehicle. Constraints (3)
balance the number of vehicles entering and leaving
a vertex. Constraints (5) - (6) ensure that all vehicle
routes satisfy the capacity constraints. Constraints (7)
- (8) ensure that all vehicle routes satisfy the dura-
tion constraints. Due to the capacity constraints (or
the duration constraints), no subtour would appear in
any vehicle route. Constraints (4) limits the number
of vehicles in use. If constraints (4) are removed, the
model would determine the optimal fleet size for each
vehicle type simultaneously.
Constraints (12) - (14) are introduced as needed.
∑
j∈V\{v
0
}
y
i j
≥
∑
k∈K
∑
j∈V\{v
0
}
∑
e∈E
i j
d
i
x
k
e
,∀i ∈V \{v
0
},
(12)
∑
i∈V \{v
0
}
y
iv
0
=
∑
i∈V \{v
0
}
d
i
, (13)
∑
j∈V\{v
0
}
y
v
0
j
+
∑
j∈V\{v
0
}
w
v
0
j
= 0. (14)
(Yaman, 2006) presented a number of MIP models
for a HVRP. Our model is most similar to the disag-
gregated flow formulation in the sense that the dura-
tion and capacity constraints are handled using vari-
ables associated on the arcs and vehicle types.
(Baldacci et al., 2008) presented a model for a
HVRP where the service duration are not considered
and parallel arcs are not allowed. The model de-
scribed in (Baldacci et al., 2008) corresponds to one
with constraint sets (1) - (5), (10), (11), (15) and (16).
y
i j
≤
∑
e∈E
i j
(Q
k
−d
j
)x
k
e
, ∀i, j ∈V : i 6= j,k ∈K ,
(15)
y
i j
≥
∑
e∈E
i j
d
j
x
k
e
, ∀i, j ∈V : i 6= j, k ∈K .
(16)
Note that Constraints (6) and (12) are aggregated ver-
sions of (15) and (16).
3.3 Literature Review
As compared to VRP, HVRP is less well studied.
Since the work of (Golden et al., 1984), a number
of heuristics and meta-heuristics have been developed
for HVRP. Recent surveys of VRP and HVRP can be
found in (Cordeau et al., 2007) and (Baldacci et al.,
2008) respectively. Studies of VRPs on multigraphs
are scarce. In this section, we give a brief review on a
few construction heuristics.
Insertion heuristics (or insertion-based construc-
tion heuristics) are widely used because they are able
to produce good feasible solutions with a low compu-
tational effort. They serve as a major component of
meta-heuristics, for constructing initial solutions and
generating good vehicle routes. Also, they are useful
for repairing interrupted schedules quickly. An ex-
tensive survey of construction heuristics for VRPs is
presented in (Br
¨
aysy and Gendreau, 2005).
Insertion heuristics generate feasible solutions by
inserting unassigned customers into vehicle routes,
one by one, at a location that minimizes the insertion
cost (changes in objective value), until all customers
are inserted. The sequential version handles one ve-
hicle route at a time whereas the parallel version con-
siders multiple vehicle routes for each insertion. The
effectiveness of insertion heuristics depend on the se-
lection of the next insertion customer and the selec-
tion of the next insertion location.
A classical sequential insertion heuristic begins
with a route that contains a seed customer. The re-
maining unassigned customers are inserted one by
one into the current route at a location with the least
insertion cost. When no unassigned customer can be
inserted into the current route without violating the
capacity constraint or the duration constraint, the pro-
cedure repeats with a new vehicle route. Seed cus-
tomers are selected among the unassigned customers
with the farthest distance from the depot. The proce-
dure stops when all customers are assigned.
Another popular class of sequential insertion
heuristic is known as sweep heuristic. Customers are
inserted one by one following a predetermined or-
der based on the polar angles from the depot to the
customers. (Renaud and Boctor, 2002) developed
a sophisticated version for generating good vehicle
routes. By solving a set-partitioning model, near-
optimal solutions of a HVRP are obtained effectively.
4 STATE OF THE ART
While the mixed integer programming model can
solve small instances effectively, heuristics are pro-
posed for large instances. We contribute a novel inser-
tion heuristic that generates feasible solutions quickly.
Insertion heuristics generate feasible solutions by
inserting unassigned customers into vehicle routes,
one by one, at a location that minimizes the insertion
cost (changes in objective value), until all customers
are inserted. For classical insertion heuristics, inser-
tion costs are determined with fixed vertex orders in
existing vehicle routes. When parallel arcs presence,
there are more flexibility and higher chance of im-
proving a solution through vertex sequencing and arc
selection. Therefore, insertion costs would be poorly
ICORES2014-DoctoralConsortium
20

estimated if vertex sequencing and arc selection are
fixed. This may lead to a poor solution because cus-
tomers are assigned to undesirable vehicles.
With this in mind, we propose an insertion heuris-
tic where insertion costs are efficiently estimated
through vertex sequencing and arc selection. Further-
more, the proposed insertion heuristic could be incor-
porated in a tabu search heuristic for obtaining near-
optimal solutions. Extensive computational tests have
been performed for sensitivity analysis.
5 METHODOLOGY
We present an efficient insertion-based heuristic for
the HVRP. The insertion costs are estimated with cus-
tomer sequencing and arc selection using an efficient
algorithm. The proposed insertion heuristic is incor-
porated in a tabu search heuristic for obtaining near-
optimal solutions. Extensive computational tests have
been performed for sensitivity analysis.
5.1 Penalized Objective Function
Heuristics often need to examine solutions that may
be infeasible. The penalized objective function used
in the heuristics described in Section 5.2 and Section
5.3 is defined as follows.
Let X denote the set of solutions that satisfy re-
quirements 1 and 2: every route starts and ends at the
depot; every customer is visited exactly once by ex-
actly one vehicle. For any solution x ∈ X , let R (x)
denote the vehicle routes that contain at least one cus-
tomer. For any vehicle route P ∈ R (x), let V (P) and
E(P) be the vertices and arcs in the route. If a vehicle
of type k ∈ K is assigned to route P, the travel cost
c(P), overload q(P) and overtime t(P) can be written
as follows.
c(P) = f
k
+
∑
e∈E(P)
c
k
e
,
t(P) =
∑
e∈E(P)
t
e
+
∑
i∈V (P)
s
i
−L
+
,
q(P) =
∑
i∈V (P)
d
i
−Q
k
+
.
To penalize the infeasible solutions, a solution x ∈ X
is evaluated using the penalized objective function
z(x) =
∑
r∈R (x)
(c(r) + α q(r) + β t(r)) where α ∈ R
+
and β ∈ R
+
are penalty weights.
5.2 Insertion Heuristic
A heuristic is proposed to construct feasible solu-
tions by iteratively inserting unassigned customers
into vehicle routes. Initially, each available vehicle
route contains exactly one customer that is randomly
picked. The remaining customers are inserted one
by one, following a randomized order, into a vehicle
route that minimizes the insertion cost (changes in pe-
nalized objective value). We estimate insertion costs
using an efficient heuristic where vertex sequencing
and arc selection are performed.
Insertion is an elementary operation that is per-
formed frequently — a customer is inserted into a
vehicle route at a position that minimizes the penal-
ized objective function. It is an easy operation for a
simple graph. However, when multiple arcs presence,
it is a difficult problem even when vertex sequence
is fixed. Suppose that V = (v
0
,v
1
,...,v
l
,v
l+1
) is the
0
1
2
l
v
0
v
1
v
2
v
l
v
l+1
E
0
E
1
E
2
E
l-1
E
l
0
Figure 1: Notations for the FSASP.
vertex sequence (after a customer is inserted) where
v
0
and v
l+1
denote the depot. For all i ∈ {0,1,2, ..,l},
let E
i
be the set of arcs between vertices v
i
and v
i+1
.
Let
b
c
e
and
b
t
e
be the travel cost and travel time of
arc e for the corresponding vehicle. The problem is
to select an arc-combination E ∈ E
0
×... ×E
l
mini-
mizing K
1
+
∑
e∈E
b
c
e
+ β
∑
e∈E
b
t
e
−K
2
+
where K
1
and
K
2
are non-negative constants given by K
1
= f
k
+
α
∑
i∈V
d
i
−Q
k
+
and K
2
= L −
∑
i∈V
s
i
for the corre-
sponding vehicle type k ∈ K . Essentially, the prob-
lem corresponds to a Multiple Choice Knapsack prob-
lem which is N P -hard. (Garaix et al., 2010) intro-
duced the problem as the Fixed Sequence Arc Selec-
tion Problem (FSASP) which is solved using dynamic
programming.
We develop an efficient heuristic for FSASP. The
heuristic is described below.
Step 1. If the longest path (with largest time and
smallest cost) satisfies the duration constraint, re-
turn the longest path.
Step 2. If the duration of the shortest path is greater
than or equal to the time limit, return the path with
the following arcs.
e
∗
i
= argmin
e∈E
i
b
c
e
+ β
b
t
e
, ∀i ∈ {0,1, ...,l}.
Step 3. Otherwise, start with the shortest path and
then pick the arcs, one by one, following a prede-
ATabuSearchHeuristicfortheHeterogeneousVehicleRoutingProblemonaMulti-graph
21

termined order, until the penalized objective func-
tion is no longer improving.
(a) Denote the currently selected arc in E
i
as ¯e
i
.
(b) For all i ∈ {0, 1,...,l}, determine arc e
∗
i
∈ E
i
minimizing the ratio as follows.
e
∗
i
= argmin
e∈E
i
b
c
e
−
c
c
¯e
i
b
t
¯e
i
−
b
t
e
, ∀i ∈ {0,1, ...,l}.
(c) Arc e
∗
i
is selected one by one following a non-
decreasing order of the ratio.
(d) Stop when the penalized objective function is
no longer improving.
The algorithm is implemented with time complex-
ity O(nlog(n)) where n is the number of customers.
Vertex sequencing is achieved based on solving
FSASP iteratively. Each iteration, a customer is
picked and is reinserted into the same vehicle route
at a position that minimizes the penalized objective
function. Stop when the penalized objective function
is no longer improving.
5.3 Tabu Search Heuristic
Tabu search has been one of the most widely applied
meta-heuristics for obtaining near optimal solutions.
The search begins with an initial solution. Succes-
sive neighbors of a solution are examined iteratively.
To avoid poor local minima, the search always moves
to the best neighborhood solution, even if it is worse
than the current solution. Recently examined solu-
tions are forbidden for a number of iterations to pre-
vent cycling.
The following paragraphs describe the tabu search
heuristic used in our prototype. Additional features
developed for tabu search can be applied to improve
the search. See, e.g. (Rochat and Taillard, 1995),
(Gendreau et al., 1999), (Taillard, 1999) and (Ho and
Gendreau, 2006).
Neighborhood Structure. Neighborhood solutions
of x ∈ X , denoted as N (x), are defined as the result-
ing solutions after applying a move operation on the
current solution x — moving a customer to another
vehicle route at a location that minimizes the penal-
ized objective function.
Tabu Operations and Aspiration Criterion. To
prevent cycling, if customer v has been moved from
vehicle R to vehicle S in the i iteration, then moving
customer v back to vehicle R is forbidden until the
i + θ iteration. These tabu solutions are allowed only
when their objective values are better than the best
feasible solution found by the search, which is often
referred as the aspiration criterion.
The Best Neighborhood Solution. Operations that
have been performed frequently should be penalized
for diversification purpose. As described in (Ho and
Gendreau, 2006), the penalty φ(x) = λc(x)
√
nϑ
ik
is
used where n is the number of customers, ϑ
ik
counts
the number of times customer i has been moved to
vehicle k, and λ is an user defined positive parame-
ter that controls the intensity of diversification. The
number of non-empty vehicles is not included since it
has been reflected in the fixed costs in the objective
function.
The best neighborhood solution x ∈ N (x) is se-
lected that minimizes z(x) + φ(x) while x is non-tabu
solution (unless it satisfies the aspiration criterion).
Self Adjusting Penalty Weights. To avoid poor lo-
cal minima, the penalty weights α and β are self-
adjusting in the search. As described in (Ho and Gen-
dreau, 2006), the penalty weights are initially set to
1. If the next solution satisfies the constraint, the cor-
responding penalty weight is divided by δ + 1 where
δ ∈ R
+
is a user defined parameter. Otherwise, it is
multiplied by δ + 1.
6 COMPUTATIONAL RESULT
Although real-world datasets are interesting from
a practical point of view, the randomly generated
datasets allow us more freedom to construct different
scenarios for sensitivity analysis. In this section, the
following approaches are tested on some randomly
generated instances that simulate practical scenarios
described in (Dai and Zhou, 2008).
• MIP: The mixed integer programming model (1)
- (14) described in Section 3.2 is solved using
CPLEX 12.5 with the default setting. The best
feasible solution obtained within two hours is re-
ported. This serves as a reference to the other ap-
proaches.
• IH: The insertion heuristic described in Section
5.2 is used to generate 1000 solutions with various
insertion order and number of vehicles used. The
best solution obtained is reported. To encourage
feasible solutions, the penalty weights are set to a
large positive number.
• TS: Initially, 5 solutions are constructed by IH.
To encourage diversified structure, the penalty
weights are set to 1. A tabu search is carried out
on each of 5 solutions for 100 iterations. The
best solution found so far is selected as a start-
ing point for the main search for 1000 iterations.
ICORES2014-DoctoralConsortium
22

The parameters used in the tabu search heuristic
are shown in Table 1.
Table 1: Parameters for the tabu search heuristic.
Parameter Value
Diversification intensity (λ) 0.0001
Penalty update factor (δ) 0.5
No. of tabu iterations (θ) d5log
10
(n)e
Note: n is the number of customers.
6.1 Instances
HVRP instances are randomly generated to reflect
different practical considerations with the parameters
shown in Table 2. Vehicles with a larger capacity have
higher dispatch cost and fuel cost. Most customers are
located in the region near the depot. Some customers
are located in more remote area. Figure 2 shows an
example.
For easier illustration, we simplify the problem as
follows. Firstly, there are exactly two parallel arcs in
every vertex-pair. Secondly, for a vehicle of a given
type, the travel times and travel costs going from ver-
tex i to vertex j are same as going from vertex j to
vertex i (i.e. symmetric times and costs).
Table 2: Characteristics of the instances.
Type k Fuel cost δ
k
Toll charge η
k
i j
Small Vehicle Uniform[0.5,1.1] Uniform[0.2,0.3] (50% of the arcs)
Large Vehicle Uniform[1.4,2.0] Uniform[0.2,0.3] (50% of the arcs)
Demand d
i
Uniform[5,35], integer
Service time s
i
Uniform[1 + 0.2d
i
, 2 + 0.2d
i
]
Location coordinates r ∼ Uniform[0,25] (80% of customers)
(r ·cosθ, r ·sinθ) r ∼ Uniform[25,100] (20% of customers)
θ ∼ Uniform[0,2π]
Travel time t
i j
Manhattan distance between i and j
Travel cost c
k
i j
(δ
k
+ η
k
i j
) t
i j
Time limit L 250 units
No. of Vehicles m
k
Small vehicles: max(3,d
∑
i∈V \{v
0
}
d
i
/150e)
Large vehicles: max(3, d
∑
i∈V \{v
0
}
d
i
/300e)
Vehicle Capacity Q
k
Small vehicles: 150
Large vehicles: 300
Dispatch cost f
k
Small vehicles: Uniform[95,105]
Large vehicles: Uniform[145,155]
Algorithmic parameters, if any, are tuned using
a set of instances (training set). All the algorithms
are evaluated using another set of instances (test set).
To avoid over-fitting, no algorithmic parameter were
tuned using the test set.
The performance of different algorithms are com-
pared using the best solution values found within a
fixed maximum solving time. Large number of in-
stances are used so that similar result could be repro-
duced with a different test set.
Figure 2: Customer distribution.
All experiments were conducted on a desktop per-
sonal computer running Windows 7 with an Intel Core
i7-2600 processor 3.4 GHz and 4 GB of main mem-
ory. All algorithms are implemented in C++ and have
been compiled using Visual Studio 2012.
6.2 Solution Quality
In order to provide accurate sensitivity analysis, we
need to evaluate the quality of the solutions obtained
by the proposed approaches.
The solution quality of IH and TS are evaluated
using a test set with 100 small instances. The number
of customers is selected from the set {14,15,16,17},
with 25 instances generated for each case. Optimal
solutions are obtained using MIP. Figure 3 illustrates
the performance of IH and TS as compared to the op-
timal solutions. The optimality gap is calculated by
100(z−r)
r
where z is the solution found by TS or IH,
and r is the optimal solution. As shown in Figure 3,
for small instances, IH is able to produce good feasi-
ble solutions quickly while TS produces near-optimal
solutions.
14 15 16 17
0 5 10 15 20 25
IH
No. of Customers
Optimality Gap (%)
14 15 16 17
0.0 0.5 1.0 1.5 2.0
TS
No. of Customers
Optimality Gap (%)
Figure 3: Optimality gap on small instances.
ATabuSearchHeuristicfortheHeterogeneousVehicleRoutingProblemonaMulti-graph
23

Optimal solutions for larger instances could not
be obtained in a reasonable time. Therefore, we eval-
uate the solution quality of IH and TS by comparing
to the best solutions obtained by MIP at a time limit
of two hours. There are 15 instances tested. There
are 3 small vehicles and 3 large vehicles. The num-
ber of customers is selected from the set {20, 25, 30}
with 5 instances generated for each case. When there
are more customers, MIP may not be unable to find a
good feasible solution within the computational time
limit. The result is shown in Table 3.
Table 3: Performance of MIP, IH and TS.
No. of MIP IH TS
Instance Customers obj. obj. time(s) obj time(s)
1 20 822.39 856.91 0.218 822.39 1.575
2 20 783.6 825.84 0.218 786.94 1.623
3 20 814.39 877.77 0.218 816.3 1.591
4 20 823.12 905.35 0.219 824.25 1.575
5 20 959.92 832.11 0.203 814.28 1.592
6 25 1024.59 1117.11 0.343 1024.59 2.215
7 25 1077.89 1073.45 0.343 1052.51 2.465
8 25 1069.79 1061.88 0.343 999.74 2.152
9 25 1092.2 1043.69 0.343 996.98 2.169
10 25 1073.74 1020.98 0.344 1030.58 2.652
11 30 1074.77 1121.29 0.483 1041.56 2.621
12 30 1127.1 1125.27 0.468 1021.4 2.62
13 30 1048.39 1186.97 0.468 1044.61 2.621
14 30 1090.07 1158.13 0.484 1038.03 2.559
15 30 1126.36 1224.11 0.468 1060.05 2.496
As shown in Table 3, IH and TS tend to produce
better solutions than MIP for larger instances. While
IH generates a large number of feasible solutions in
a short time, TS is able to find much better solution
than IH and MIP within a few seconds.
6.3 Sensitivity Analysis
Through sensitivity analysis, we try to develop man-
agerial insights for better decisions and hopefully
generate more effective heuristics. The result could
be reproduced on a different test set without signifi-
cant deviations.
6.3.1 Duration Constraint
Instances with different time limit is tested. Initially,
10 scenarios are generated with 100 customers. By
varying the service time-limit L to values of {200,
210, 220, 230, 240 250}, we have 60 instances. At
most 12 small vehicles and 6 large vehicles can be
used. Figure 4 illustrates the objective value and the
time at which the solution is found.
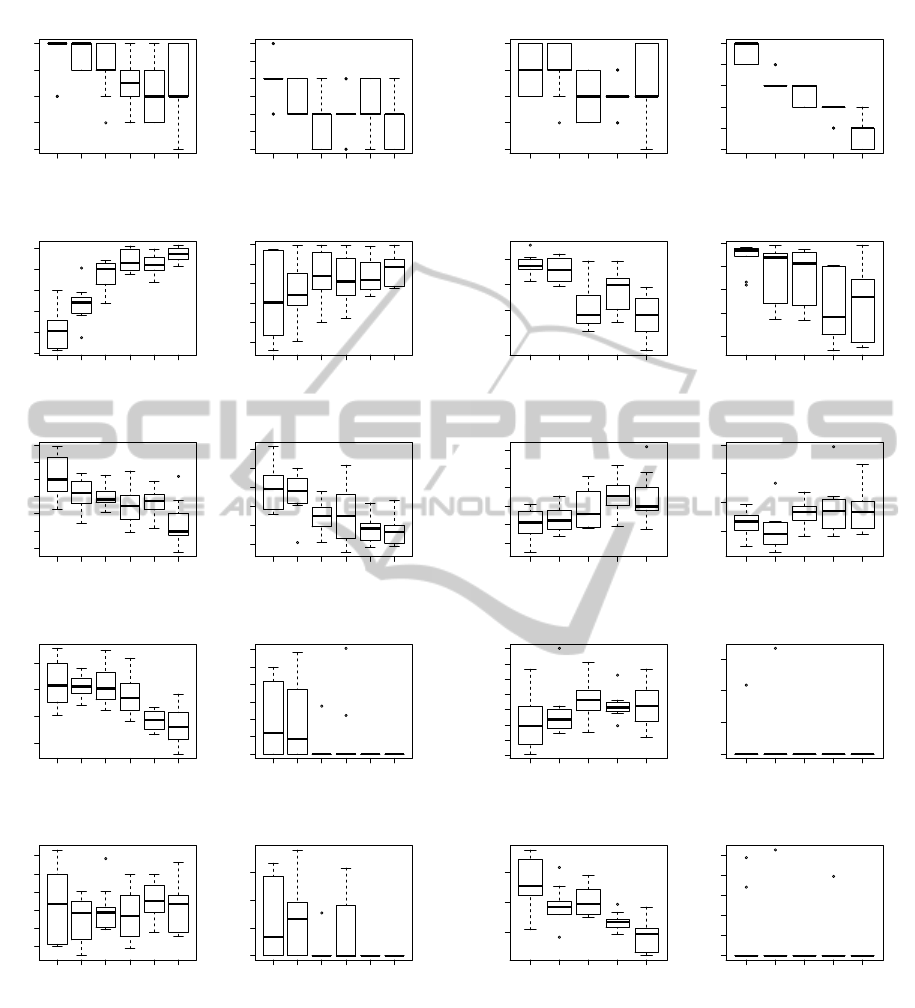
Figure 6 illustrates the effect of service time limit
for each vehicle type on the following measures.
• Number of vehicles in use;
• Capacity Utilization: total demand delivered by
the vehicles divided by the vehicle capacity;
200 220 240
3000 3500 4000
Solution Value
Time Limit
Solution Value
200 220 240
10.0 11.0 12.0 13.0
Solution Time
Time Limit
Solution Time (s)
Figure 4: Performance of TS with different time limits.
• Time Utilization: total travel time divided by the
time limit;
• More Costly Arcs: total number of more costly
arcs used by a vehicle type divided by the total
number of arcs used by the vehicle type;
• Remote Customers: total number of remote cus-
tomers visited by a vehicle type divide by the total
number of remote customers.
As shown in Figure 6, small vehicles should be
used to visit remote customers since the travel cost is
smaller. Furthermore, large vehicles are useful only
when the duration constraint is restrictive.
6.3.2 Capacity Constraint
Similarity, we perform sensitivity on the capacity con-
straint. Vehicle capacities (for both the small vehicles
and large vehicles) are reduced by a ratio among val-
ues of {0.6,0.7,0.8, 0.9,1}. For example, 0.6 means
that the capacities are reduced by 40% whereas 1
means that the capacities are unchanged. The time
limit is fixed to 250. Figure 5 illustrates the objec-
tive value and the time at which the solution is found.
Figure 7 illustrates the effect of vehicle capacity on
the measures.
0.6 0.8 1
2800 3200 3600
Solution Value
Capacity
Solution Value
0.6 0.8 1
8 9 10 12
Solution Time
Capacity
Solution Time (s)
Figure 5: Performance of TS with different vehicle capaci-
tities.
ICORES2014-DoctoralConsortium
24
200 220 240
8 9 10 11 12
Small Vehicle
Time Limit
No. of Vehicles
200 220 240
1.0 2.0 3.0 4.0
Large Vehicle
Time Limit
No. of Vehicles
200 220 240
70 80 90
Small Vehicle
Time Limit
Capacity utilization (%)
200 220 240
50 70 90
Large Vehicle
Time Limit
Capacity utilization (%)
200 220 240
65 75 85 95
Small Vehicle
Time Limit
Time utilization (%)
200 220 240
40 60 80
Large Vehicle
Time Limit
Time utilization (%)
200 220 240
20 30 40 50
Small Vehicle
Time Limit
More costly arcs (%)
200 220 240
0 5 15 25
Large Vehicle
Time Limit
More costly arcs (%)
200 220 240
20 24 28
Small Vehicle
Time Limit
Remote customers (%)
200 220 240
0 5 10 15
Large Vehicle
Time Limit
Remote customers (%)
Figure 6: The effect of time limit.
7 EXPECTED OUTCOME
The proposed insertion heuristic is able to produce
feasible solutions quickly. When extra time is pro-
vided, near-optimal solutions could be obtained using
the tabu search heuristic.
We have performed extensive computational tests
0.6 0.7 0.8 0.9 1
8 9 10 11 12
Small Vehicle
Capacity
No. of Vehicles
0.6 0.7 0.8 0.9 1
1 2 3 4 5 6
Large Vehicle
Capacity
No. of Vehicles
0.6 0.7 0.8 0.9 1
92 94 96 98
Small Vehicle
Capacity
Capacity utilization (%)
0.6 0.7 0.8 0.9 1
80 85 90 95
Large Vehicle
Capacity
Capacity utilization (%)
0.6 0.7 0.8 0.9 1
60 70 80
Small Vehicle
Capacity
Time utilization (%)
0.6 0.7 0.8 0.9 1
40 50 60 70
Large Vehicle
Capacity
Time utilization (%)
0.6 0.7 0.8 0.9 1
10 20 30 40
Small Vehicle
Capacity
More costly arcs (%)
0.6 0.7 0.8 0.9 1
0 5 10 15
Large Vehicle
Capacity
More costly arcs (%)
0.6 0.7 0.8 0.9 1
25 30 35
Small Vehicle
Capacity
Remote customers (%)
0.6 0.7 0.8 0.9 1
0 2 4 6 8 10
Large Vehicle
Capacity
Remote customers (%)
Figure 7: The effect of capacitiy limit.
on HVRP instances that reflects different practical
considerations. For sensitivity analysis, a number of
measures are introduced to characterise the solutions.
The results are summarized below.
• large vehicles are more useful when the duration
constraint or the capacity constraint is restrictive;
• the fleet composition depends on the vehicle ca-
pacities;
ATabuSearchHeuristicfortheHeterogeneousVehicleRoutingProblemonaMulti-graph
25

• small vehicles tend to use more costly arcs than
large vehicles;
• small vehicles should be used to visit remote cus-
tomers since the travel cost is lower.
REFERENCES
Baldacci, R., Battarra, M., and Vigo, D. (2008). Routing a
heterogeneous fleet of vehicles. In Golden, B., Ragha-
van, S., and Wasil, E., editors, The vehicle routing
problem: latest advances and new challenges, vol-
ume 43 of Operations Research/Computer Science In-
terfaces, pages 3–27. Springer US.
Baldacci, R. and Mingozzi, A. (2009). A unified exact
method for solving different classes of vehicle rout-
ing problems. Math. Programming, 120:347–380.
Br
¨
aysy, O. and Gendreau, M. (2005). Vehicle routing prob-
lem with time windows, part i: Route construction and
local search algorithms. Transportation Sci., 39:104–
118.
Cordeau, J., Laporte, G., Savelsbergh, M., and Vigo, D.
(2007). Vehicle routing. In Barnhart, C. and Laporte,
G., editors, Transportation, Handbooks in Operations
Research and Management Science, volume 14, pages
367–428. Elsevier, Amsterdam.
Dai, J. and Zhou, C. (2008). Beer Distribution in China.
PhD thesis, The School of Industrial and Systems En-
gineering, Georgia Institute of Technology.
Garaix, T., Artigues, C., Feillet, D., and Josselin, D. (2010).
Vehicle routing problems with alternative paths: An
application to on-demand transportation. Eur. J. Oper.
Res., 204:62–75.
Gendreau, M., Laporte, G., Musaraganyi, C., and Taillard,
E. (1999). A tabu search heuristic for the heteroge-
neous fleet vehicle routing problem. Computers &
Operations Resesarch, 26:1153–1173.
Golden, B., Assad, A., Levy, L., and Gheysens, F. (1984).
The fleet size and mix vehicle routing problem. Com-
puters & Operations Resesarch, 11:49–66.
Ho, S. and Gendreau, M. (2006). Path relinking for the
vehicle routing problem. J. Heuristics, 12:55–72.
Renaud, J. and Boctor, F. (2002). A sweep-based algorithm
for the fleet size and mix vehicle routing problem. Eur.
J. Oper. Res., 140:618–628.
Rochat, Y. and Taillard, E. (1995). Probabilistic diversifi-
cation and intensification in local search for vehicle
routing. J. Heuristics, 1:147–167.
Taillard, E. (1999). A heuristic column generation method
for the heterogeneous fleet vrp. RAIRO - Operations
Research, 33:1–14.
Yaman, H. (2006). Formulations and valid inequalities for
the heterogeneous vehicle routing problem. Math.
Programming, 106:365–390.
ICORES2014-DoctoralConsortium
26
