
Decentralized Supervisory Control of Discrete Event Systems
Moving Decisions Closer to Actions
Ahmed Khoumsi and Hicham Chakib
Department of Electrical & Computer Engineering, University of Sherbrooke, Sherbrooke, Canada
Keywords:
Decentralized Supervisory Control, Discrete Event Systems, Local Supervisors, Fusion Modules, Sensors,
Actuators, Moving Decision Closer to Actions, Mixed Architecture, Mixed-observability.
Abstract:
In decentralized control of discrete event systems, two main agents contribute to the computation of decisions:
local supervisors and fusion modules. The local supervisors process the information detected on the plant
and its environment, and transmit their results to the fusion modules. The latter process what is received
from the local supervisors in order to decide actions to be applied to the plant. In the existing decentralized
control architectures, the local supervisors execute complex operations, while the fusion modules execute
simple operations. In the present article, we propose to move the decision computation complexity from
local supervisors to fusion modules, that is what we term: moving decisions closer to actions. We justify
this movement of decision and develop a simple architecture based on it. With the proposed architecture, the
local supervisors are simple local observers, while all decisions are computed by the fusion modules. We
characterize the class of languages achievable with the new architecture and compare it with the classes of
languages achievable with the existing decentralized architectures and the centralized architecture.
1 INTRODUCTION
In supervisory control, the behavior of a plant, mod-
eled as a discrete event systems (DES), is restricted
by a supervision system (or supervisor) so that it re-
spects a global specification (Ramadge and Wonham,
1987). In decentralized supervisory control (more
briefly: decentralized control) of DES, observation
and control tasks are shared among several agents
that cooperate to take adequate decisions that restrict
the behavior of the plant as desired. In this article,
we consider decentralized control as it has been initi-
ated in (Cieslak et al., 1988; Lin and Wonham, 1988;
Lin and Wonham, 1990; Rudie and Wonham, 1992)
and then continued in many studies, such as (Rudie
and Willems, 1995; Prosser et al., 1997; Ricker and
Rudie, 2000; Overkamp and van Schuppen, 2001;
Jiang and Kumar, 2000; Yoo and Lafortune, 2002;
Yoo and Lafortune, 2004; Ricker and Rudie, 2007;
Kumar and Takai, 2007; Chakib and Khoumsi, 2011).
In decentralized control, two categories of agents
contribute to the computation of decisions, which we
call local supervisors and fusion modules. The local
supervisors process detected information on the plant
and its environment, and transmit their results to the
fusion modules. The latter process what is received
from the local supervisors in order to decide enable-
ment/disablement of events of the plant.
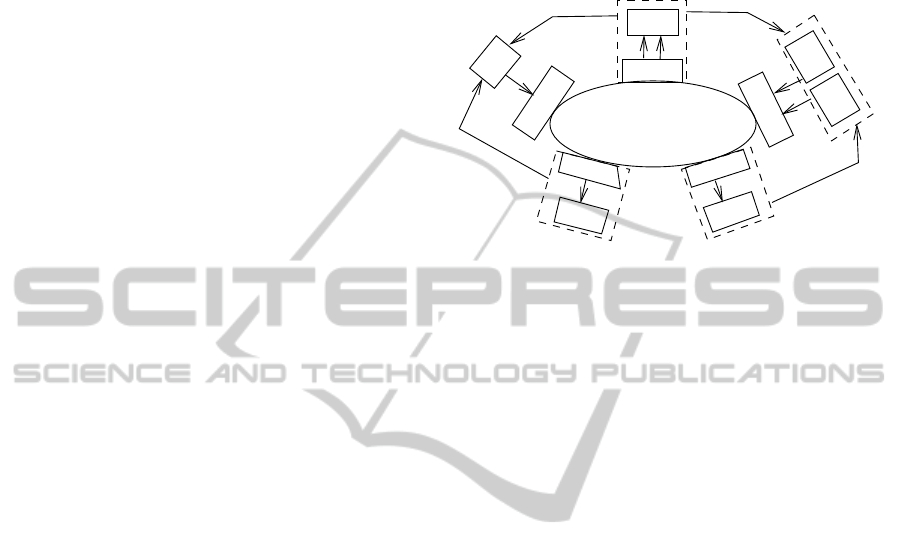
Figure 1 outlines the conceptual structure of de-
centralized control, by an example with three local
supervisors (Sup
i
)
i=1···3
and two fusion modules FM
σ
and FM
µ
. Each Sup
i
observes the behavior of the
plant through a mask (or projection) P
i
, and processes
the observed information before providing the result
to one or both fusion modules. Each fusion module
combines what it receives from two local supervisors,
in order to take enablement/disablement decisions.
P
3
P
2
P
1
FM
µ
FM
σ
Sup
1
Sup
2
Sup
3
Plant
Figure 1: Decentralized control.
Definition 1. A local supervisor or fusion module is
said powerful if it has a high processing capacity and
models of the dynamics of the plant and the specifica-
tion. On the other hand, it is said powerless if it has
a minimal processing capacity and no model of the
dynamics of the plant and the specification.
280
Khoumsi A. and Chakib H..
Decentralized Supervisory Control of Discrete Event Systems - Moving Decisions Closer to Actions.
DOI: 10.5220/0005010702800287
In Proceedings of the 11th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2014), pages 280-287
ISBN: 978-989-758-040-6
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

A typical minimal processing capacity is to
be able to execute simple operations, for example
boolean operations. A typical high processing ca-
pacity is to be able to manipulate complex automata-
based models of DES, by executing various automata-
based operators.
The following assumption has been made by the
existing architectures of decentralized control:
Assumption 1. The local supervisors are powerful
and the fusion modules are powerless.
Due to assumption 1, the local supervisors use
complex operations (e.g. automata-based) to compute
local decisions which are made accessible to fusion
modules. Due to assumption 1, the fusion modules
merge by simple (e.g. boolean) operations the local
decisions of the local supervisors, in order to com-
pute global decisions of enabling/disabling control-
lable events which are effectively applied to the plant.
In a word, the most complex part of decision com-
putation is done by powerful local supervisors, while
the simplest part is done by powerless fusion mod-
ules. A possible justification of this approach is that
it is consistent with hierarchical organizations, con-
sidering that fusion modules are at a higher level than
local supervisors. Besides, this approach gives a good
insight of the limit of control that can be reached with
powerless fusion modules. In the sequel, decentral-
ized control based on assumption 1 (which includes
the previously mentioned references) will be referred
to as conventional decentralized control.
Since most of the important results in decentral-
ized control have been obtained in conventional de-
centralized control, assumption 1 has been consid-
ered almost as a standard. But we had a long reflec-
tion which led us to think that assumption 1 is not
always indispensable and may sometimes have dis-
advantages. This is confirmed by our examination
of several examples used in the literature of conven-
tional decentralized control, in which we see no prac-
tical reason that obliges to make assumption 1. This
assumption is even sometimes artificial, for example
when the separation between local supervisors and
fusion modules is logical but not physical. Indeed,
we found examples where the same physical module
hosts a local supervisor and a fusion module. We will
return on this point in Section 2.5.
The above observation has motivated this article,
where our objective is to propose a new decentralized
architecture without the limitative assumption 1. Our
first idea has then been to use powerful local supervi-
sors as well as powerful fusion modules. But as we
will explain in Section 2.5 and prove in Section 5.2,
if the fusion modules are powerful, then it is not re-
strictive to have powerless local supervisors That is,
the following assumption is not restrictive:
Assumption 2. The local supervisors are powerless
and the fusion modules are powerful.
We use the following figurative definition:
Definition 2. To move decisions closer to actions
means to replace assumption 1 by assumption 2, be-
cause such a replacement implies moving the decision
computation complexity from the local supervisors to
the fusion modules.
The remainder of the paper is organized as fol-
lows: In Section 2, we present a reflection which led
us to deduce that moving decisions closer to actions
is realistic and has advantages. A decentralized ar-
chitecture based on this displacement of decisions is
proposed in Section 3. The proposed architecture is
called mixed architecture, because it has similarities
with both decentralized and centralized architectures.
In Section 4, we study the existence of solutions and
define the notion of mixed-observability which, with
controllability, characterizes the class of languages
achievable under the mixed architecture. Section 5
compares this class with the classes of languages
achievable under conventional decentralized control
and centralized control. Finally, Section 6 contains a
conclusion and propositions of future work.
2 MOVE DECISIONS CLOSER TO
ACTIONS: REALISTIC AND
ADVANTAGEOUS
This section presents a reflection on decentralized
control, which leads us to deduce that assumption 1
is not always indispensable. More precisely, our de-
duction is that moving decisions closer to actions (i.e.
replacing assumption 1 by assumption 2) is realistic
and has advantages. The most important advantage is
that such a movement of decision will permit to obtain
a simpler and more general control architecture.
2.1 Structure based on Sensors and
Actuators
In practice, a control system interacts with the plant
under control through two categories of modules: sen-
sors and actuators.
• Sensors are parts of the plant through which the
control system detects information on the behav-
ior and the environment of the plant. Examples of
sensors: an obstacle detector that warns when an
object is too close to the plant, and an accelerom-
eter that informs of the acceleration of the plant.
DecentralizedSupervisoryControlofDiscreteEventSystems-MovingDecisionsClosertoActions
281

• Actuators are parts of the plant through which the
control system can influence the behavior of the
plant. Examples of actuators: an electric motor
that gives motion to a car, and a valve actuator
that opens and closes a valve of a water system.
In decentralized control, several sensors and actu-
ators are distributed at several parts of the plant, ac-
cording to given requirements which may be: physi-
cal, i.e. to satisfy mandatory objectives due to physi-
cal considerations; or logical, i.e. to satisfy desirable
objectives, e.g. to decrease cost or increase efficiency.
Let us present concrete sensor and actuator neighbor-
hoods and their usual theoretical models in conven-
tional decentralized control.
2.1.1 Sensors Neighborhood
A sensor plays the role of an interface through which
the control system obtains information on the be-
havior and the environment of the plant. Accord-
ing to given requirements, sensors are regrouped by
sites identified by numbers i = 1 ···n. Each site i
has a given memory and processing capability (more
briefly: processing capacity) to process information
obtained from sensors. The processed information is
then made accessible to controllers of actuators. Let
us make the link with the usual theoretical models:
• The information obtained in site i from sensors is
modeled as the alphabet of events observable at
site i , usually denoted Σ
o,i
.
• The sensors of site i are modeled as a mask (or
projection) P
i
that shows (all and only) the events
of Σ
o,i
, among the events executed by the plant.
• The processing capacity of site i (that processes
information obtained from sensors of site i) is
modeled as a local supervisor Sup
i
.
Hence, the neighborhood of the sensors of a site
consists of the local supervisor of that site.
2.1.2 Actuator Neighborhood
An actuator is an interface through which the con-
trol system can influence the behavior of the plant.
Each actuator is directly controlled by the means of
a given processing capacity which, from information
provided by local supervisors, decides which enable-
ment/disablement actions to apply to the actuator. Let
us make the link with the usual theoretical models.
• An actuator is associated to a set of control-
lable events and is modeled as a module that re-
ceives orders of enabling/disabling these control-
lable events. For example, a motor that receives
the commands “start moving” and “stop moving”.
• The processing capacity used to control an actu-
ator is modeled as a set of fusion modules, typ-
ically one fusion module FM
σ
for each control-
lable event σ associated to the actuator.
• Each fusion module FM
σ
merges (i.e. collects and
processes) information from sites (more precisely,
from local supervisors), in order to compute (en-
ablement/disablement) decisions on σ that are ap-
plied to the actuator.
• The set of controllable events whose fusion mod-
ules are connected to (i.e. receive information
from) a given site i, is specified by the The con-
nectivity between local supervisors and fusion
modules can also be specified by the index set of
a controllable σ: I
σ
= {i |σ ∈ Σ
c,i
}. That is, I
σ
specifies to which local supervisors is connected
the fusion module FM
σ
.
Hence, the neighborhood of an actuator consists
of the set of fusion modules acting on it.
2.2 Knowledge of the Plant and
Processing Capacity
We have seen that in decentralized control, two types
of processing systems are used: local supervisors and
fusion modules. Hence, to evaluate the capacity of
control that can be achieved, it is necessary to spec-
ify, for each local supervisor and each fusion module:
what knowledge it has of the plant and the specifica-
tion, and what is its processing capacity.
2.2.1 Knowledge of the Plant and the
Specification
It is necessary to specify what knowledge of the plant
and the specification, each local supervisor and fusion
module has. When it is not null, such a knowledge is
usually in the form of automata-based models of the
dynamics of the plant and the specification.
In conventional decentralized control, due to as-
sumption 1, only the local supervisors have a knowl-
edge of the plant and the specification.
2.2.2 Processing Capacity
It is necessary to specify what is the processing ca-
pacity of each local supervisor and fusion module. By
processing capacity, we mean memory and processing
capability. The fusion modules associated to the same
actuator must be assumed having the same processing
capacity, because they are physically in the control
module of the same actuator. A typical minimal pro-
cessing capacity is to be able to execute simple op-
erations, for example boolean operations. A typical
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
282
high processing capacity is to be able to manipulate
complex automata-based models of DES by execut-
ing various automata-based operators.
In conventional decentralized control, due to as-
sumption 1, only the local supervisors have a high
processing capacity, while the fusion modules have
a minimal processing capacity.
2.3 Functioning
Let Σ
c
=
∪
i=1···n
Σ
c,i
denote the set of all controllable
events. Each Sup
i
(modeling the processing system
in site i) uses its processing capacity and its knowl-
edge of the plant and the specification, to process in-
formation taken from sensors of site i (modeled by the
events of Σ
o,i
). The processing result of Sup
i
is then
an information accessible by some means to every fu-
sion module FM
σ
connected to Sup
i
(i.e. such that
σ ∈ Σ
c,i
, or equivalently i ∈ I
σ
).
Each FM
σ
(which models the processing system
that decides on enablement/disablement of σ ∈ Σ
c
)
uses its processing capacity and its knowledge of the
plant, to process information from supervisors Sup
i
connected to it. The processing result of FM
σ
is a
command that is applied to an actuator of the plant to
disable/enable σ.
In conventional decentralized control, due to as-
sumption 1, powerful local supervisors compute lo-
cal decisions from their knowledge of the plant and
the specification, and powerless fusion modules com-
pute effective decisions by combining the local deci-
sions using operations independent of the plant and
the specification.
2.4 Illustrative Example
Figure 2 outlines by an example our [sensor,actuator]-
based vision of decentralized control. The plant
has three sensors and two actuators. The three
sensors detect information on the plant and trans-
mit it in the form of events a
1
,{a
2
,b
2
},c
3
, respec-
tively. The two actuators are controlled by enable-
ment/disablement of the events {σ,µ} and ρ, respec-
tively. Hence, Σ
c
= {σ,µ,ρ}. Dec(x) denotes the en-
ablement/disablement decision taken on an event x.
The control system consists of three supervisors
and three fusion modules. The three supervisors
(Sup
i
)
i=1···3
process the events obtained from the
three sensors, respectively. These events are mod-
eled by the local observable alphabets Σ
o,1
= {a
1
},
Σ
o,2
= {a
2
,b
2
} and Σ
o,3
= {c
3
}, An arrow connecting
Sup
i
to FM
x
means that the processing result of Sup
i
is
accessible to FM
x
Hence, FM
σ
and FM
µ
have access
to processing results from Sup
1
and Sup
2
, and FM
ρ
has access to processing results from Sup
2
and Sup
3
.
This connectivity is modeled by the controllable al-
phabets Σ
c,1
= {σ,µ}, Σ
c,2
= {σ,µ,ρ} and Σ
c,3
= {ρ}.
This connectivity is also modeled by the index sets:
I
σ
= I
µ
= {1,2} and I
ρ
= {2,3}.
b
2
a
2
Actuator
FM
ρ
Dec( )
ρ
a
1
Sup
1
c
3
Sup
3
Sup
2
FM
µ
FM
σ
Actuator
Dec( )
µ
Dec( )
σ
Plant
Sensor
Sensor
Sensor
Site 1
Site 3
Site 2
Figure 2: Example of our [sensor,actuator]-based vision of
decentralized control.
2.5 Discussion and Objective
Intuitively, σ ∈ Σ
c,i
(or equivalently: i ∈ I
σ
) means
that Sup
i
is involved in some way in the decision
of enabling/disabling σ, by providing information to
FM
σ
which takes the effective decision.
Definition 3. Sup
i
is said actively involved in a de-
cision (of enablement/disablement) on σ ∈ Σ
c
, if it
computes a local decision on σ which is used by FM
σ
to compute the effective decision on σ. On the other
hand, Sup
i
is said passively involved in a decision on
σ, if it just provides an observed information which is
used by FM
σ
to compute the effective decision on σ.
Active involvement of a local supervisor is ap-
propriate if it is powerful (Def. 1), because it can
use its high processing capacity and its knowledge of
the plant and the specification, to compute local de-
cisions. Passive involvement of a local supervisor is
appropriate if it is powerless (Def. 1).
In conventional decentralized control, due to as-
sumption 1, the (powerful) local supervisors are ac-
tively involved by computing local decisions (using
complex automata-based operations), and the (pow-
erless) fusion modules combine the local decisions
(using simple operations) in order to compute global
decisions of enabling/disabling controllable events.
Since most of the important results in decentralized
control have been obtained in conventional decentral-
ized control, assumption 1 has been practically con-
sidered as a standard in decentralized control. But our
[sensor-actuator]-based vision shows no concrete rea-
son that obliges to make assumption 1. Concretely,
we see no reason why sensor environments must be
powerful, while actuator environments must be pow-
erless. Our impression is confirmed by the fact that
DecentralizedSupervisoryControlofDiscreteEventSystems-MovingDecisionsClosertoActions
283
the literature of conventional decentralized control
presents no concrete justification of the indispensabil-
ity of assumption 1. In some examples, the separation
between local supervisors and fusion modules is log-
ical but not physical. For example, an illustrative ex-
ample of a decentralized traffic control is presented in
(Yoo and Lafortune, 2004), where the same physical
module hosts a local supervisor and a fusion module.
In addition to the fact that assumption 1 is not in-
dispensable, we think that it is sometimes restrictive,
from the following point of view: In conventional
decentralized control, the local supervisors convert a
precise information (their local observations) into a
coarse information (their local decisions) before send-
ing it to the fusion modules.
Our first objective has therefore been to remove
assumption 1, by using powerful local supervisors as
well as powerful fusion modules. But if the fusion
modules are powerful, it is not indispensable to have
powerful local supervisors. The explanation is that
the maximal information which is available to decide
of enabling/disabling a controllable event σ, is the set
of events observed by the local supervisors connected
to FM
σ
. Such information can be provided by power-
less local supervisors which just play the role of ob-
servers that forward their observations to the fusion
modules. Hence our objective in Sections 3 and 4 is:
Objective 1. To develop a decentralized control ar-
chitecture which uses assumption 2 (instead of as-
sumption 1).
3 CONTROL ARCHITECTURE
BASED ON ASSUMPTION 2
3.1 Principle of the Proposed
Architecture
We will make the following assumption which has
also been made in all the control architectures:
Assumption 3. The plant is slower than the control
system, in the sense that between the executions of
any pair of consecutive events by the plant, the con-
trol system has the time to compute and apply its en-
ablement/disablement decisions.
For every controllable event σ, we denote by Σ
σ
the set of events observable by the local supervisors
connected to FM
σ
. Formally:
Definition 4. For every controllable event σ, the ob-
servable alphabet of FM
σ
is Σ
σ
=
∪
i∈I
σ
Σ
o,i
.
In the proposed architecture, each fusion module
FM
σ
knows the observable alphabets of the local su-
pervisors connected to it, that is, it knows every Σ
o,i
such that i ∈ I
σ
(or equivalently: σ ∈ Σ
c,i
). Also, FM
σ
is informed of the occurrence of every event in Σ
σ
by
the local supervisors connected to it. For these rea-
sons and due to assumption 3, FM
σ
has conceptually
a partial observation of the plant through the alpha-
bet Σ
σ
, that is, FM
σ
can determine the order of the
occurrences of the events of Σ
σ
. From the latter infor-
mation, FM
σ
determines its decisions on σ. In other
words, each FM
σ
is conceptually a centralized super-
visor under partial observation of the plant through
the alphabet Σ
σ
. Hence, the proposed architecture is
equivalent to a collection of centralized supervisors,
each one controlling a single controllable event σ. We
call it mixed architecture, because it has similarities
with both decentralized and centralized controls.
Note that with the mixed architecture, the local
supervisors are (powerless) observers and the fusion
modules are (powerful) event controllers. But to fa-
cilitate a comparison with conventional decentralized
control, we will keep the usual designations local su-
pervisor and fusion module.
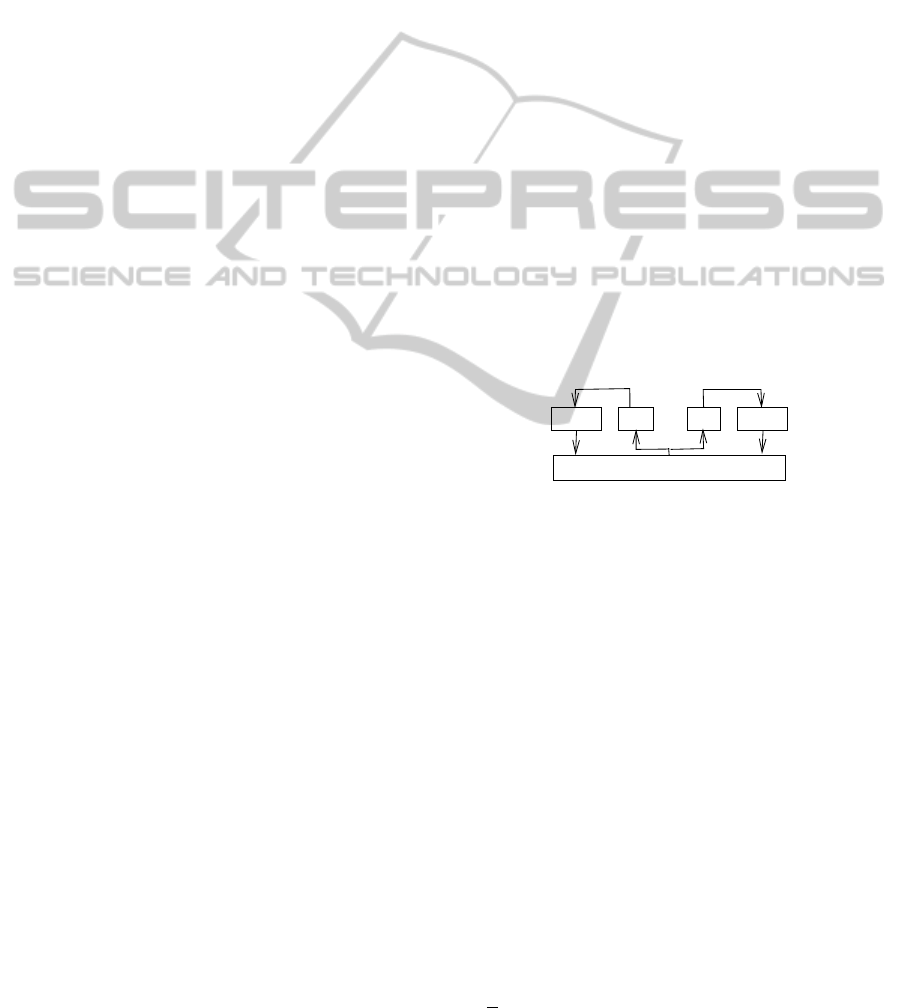
Figure 3 outlines the conceptual representation of
the mixed architecture for the example of Figure 1,
where P
σ
and P
µ
denote the projections in the alpha-
bets Σ
σ
and Σ
µ
, respectively.
FM
µ
FM
σ
P
µ
P
σ
Plant
Figure 3: Conceptual representation of the mixed architec-
ture for the example of Fig. 1.
3.2 Mixed Supervisor
As already explained, each FM
σ
is a centralized su-
pervisor under partial observation through the alpha-
bet Σ
σ
. As usual, consider an automaton G modeling
the plant and the regular language K modeling the
specification, both defined over the same alphabet Σ.
Here are a few necessary definitions and notations:
• Σ
∗
is the set of all finite sequences of events of Σ,
including the empty sequence.
• For two sequences λ,µ ∈ Σ
∗
, µ is said a prefix of
λ, if there exists ρ ∈ Σ
∗
such that λ = µρ.
• L(A) is the prefix-closed language of an automa-
ton A, that is, the set of sequences starting in the
initial state of A and terminating in any state of A.
• L
m
(A) is the marked language of A, that is, the set
of sequences starting in the initial state of A and
terminating in a marked state of A.
• L consists of the sequences of L and their prefixes.
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
284

• Σ
c
=
∪
i=1···n
Σ
c,i
and Σ
uc
= Σ \ Σ
c
are the sets of
controllable and uncontrollable events, resp.
• Σ
o
=
∪
i=1···n
Σ
o,i
is the set of observable events.
• P (resp. P
i
, P
σ
) is the natural projection that hides,
from any λ ∈ Σ
∗
, the events which are not in Σ
o
(resp. Σ
o,i
, Σ
σ
).
• E
σ
= {λ ∈ K |λσ ∈ K }.
• D
σ
= {λ ∈ K |λσ ∈ L (G) \K }.
• En and Dis denote the decisions of enabling and
disabling an event, respectively.
Intuitively, E
σ
(resp. D
σ
) contains the sequences
executed by the plant after which σ must be enabled
(resp. disabled) by FM
σ
to guarantee that (all and
only) the sequences in the specification are accepted.
A supervisor of a control architecture can be de-
fined as a function SUP that associates one of the
decisions En or Dis to every pair (λ,σ), where λ is
a sequence executed by the plant and σ is an event.
SUP(λ,σ) is the decision taken by SUP for σ when
the plant has executed λ. As usual, SUP(λ, σ) = En
when σ ∈ Σ
uc
.
A supervisor of a mixed architecture, which we
call mixed supervisor, is the set of the fusion modules
used in the mixed architecture. We consider that after
the execution of a sequence λ by the plant, each fusion
module FM
σ
takes its decision SUP(λ,σ) which de-
pends on two things: 1) the observed execution P
σ
(λ),
and 2) its knowledge of the plant and the specification,
which is formalized by P
σ
(E
σ
) and P
σ
(D
σ
). Hence,
a mixed supervisor is any supervisor that takes de-
cisions SUP(λ,σ) depending on the above points 1
and 2. Here is an example of mixed supervisor:
∀σ ∈ Σ
c
, SUP(λ,σ) =
En, if P
σ
(λ) ∈ P
σ
(E
σ
)\P
σ
(D
σ
)
Dis, if P
σ
(λ) ∈ P
σ
(D
σ
)\P
σ
(E
σ
)
En or Dis, if P
σ
(λ) ̸∈ (P
σ
(E
σ
)∪P
σ
(D
σ
))
don’t know, if P
σ
(λ) ∈ P
σ
(E
σ
)∩P
σ
(D
σ
)
(1)
Intuitively, the above mixed supervisor enables
(resp. disables) σ when it is certain that enabling
(resp. disabling) σ will not violate the specification.
When FM
σ
is certain that σ is impossible (i.e. σ is
not accepted by the plant), it can decide any of En
and Dis, because σ will not occur whatever the deci-
sion taken by FM
σ
. When FM
σ
is uncertain of the
adequate decision, it takes a “don’t know” decision
which may concretely correspond to an alarm. We
have considered this “don’t know” situation explic-
itly, because it is undesirable and we will present in
Section 4 the condition that avoids it.
3.3 Example
Consider the prefix-closed plant of Figure 4 where
all the states are marked. The specification is
obtained by removing state 9. We have Σ
o,1
=
{a
1
},Σ
o,2
= {a
2
},Σ
o,3
= {a
3
}, Σ
o
= Σ
o,1
∪ Σ
o,2
∪
Σ
o,3
= {a
1
,a
2
,a
3
}, Σ
c,1
= Σ
c,2
= Σ
c
= {σ}, Σ
c,3
=
/
0. Hence, I
σ
= {1,2}. Therefore, the observable
alphabet of FM
σ
is Σ
σ
= {a
1
,a
2
}. We compute
E
σ
= {a
1
a
2
a
3
}, D
σ
= {a
2
a
1
a
3
}, P
σ
(E
σ
) = {a
1
a
2
}
and P
σ
(D
σ
) = {a
2
a
1
}. If we apply Eq. (1) to this ex-
ample, we obtain the mixed supervisor of Eq (2).
∀σ ∈ Σ
c
, SUP(λ,σ) =
En, if P
σ
(λ) = a
1
a
2
Dis, if P
σ
(λ) = a
2
a
1
En or Dis, if P
σ
(λ) ∈ {a
1
,a
2
}
(2)
a
2
a
2
a
3
a
3
1
6
7
8
9
2
3
4
5
σ
σ
a
1
a
1
Figure 4: Example of plant and specification.
4 EXISTENCE OF SOLUTIONS
4.1 Mixed-Observability
Consider an automaton G modeling the plant over an
alphabet Σ. We define a notion of observability, here
called mixed-observability, which (with controllabil-
ity) characterizes the class of languages achievable
under the mixed architecture.
Definition 5. Given a mixed architecture speci-
fied by the alphabets (Σ
σ
)
σ∈Σ
c
, a regular language
K ⊆ L
m
(G) is said mixed-observable if: ∀σ ∈ Σ
c
:
P
σ
(E
σ
) ∩ P
σ
(D
σ
) =
/
0.
Intuitively, K is mixed-observable if every FM
σ
has at any time enough information to decide on the
enablement/disablement of σ without violating the
specification. This means that for every σ ∈ Σ
c
, the
decision “don’t know” OF Eq. 1 is never taken.
When Σ
σ
= Σ
o
for every σ ∈ Σ
c
, mixed-
observability is equivalent to observability of the cen-
tralized architecture. This is not surprising, because
this case occurs when each FM
σ
observes all the
events that are observable by a centralized supervisor.
4.2 Existence Result
A language K ⊆ L
m
(G) is said L
m
(G)-closed if K =
K ∩ L
m
(G), and it is said (L(G),Σ
uc
)-controllable if
DecentralizedSupervisoryControlofDiscreteEventSystems-MovingDecisionsClosertoActions
285

K Σ
uc
∩L(G) ⊆ K . Let L(SUP/G) denote the prefix-
closed language generated by the plant under the
control of a supervisor SUP, and let L
m
(SUP/G) =
L(SUP/G) ∩ L
m
(G) be the corresponding marked
language. SUP is said non-blocking if L
m
(SUP/G) =
L(SUP/G). L(SUP/G) is formally defined as fol-
lows, where ε denotes the empty event sequence:
• ε ∈ L(SUP/G)
• [(λ ∈ L(SUP/G)) ∧(λσ ∈ L(G))∧(SUP(λ, σ) =
En)] ⇔ λσ ∈ L(SUP/G).
The following theorem states a necessary and suf-
ficient condition for the existence of a mixed super-
visor SUP that controls a plant G so that it respects a
specification K .
Theorem 1. Consider a nonempty K ⊆ L
m
(G).
There exists a nonblocking mixed supervisor SUP
satisfying L(SUP/G) = K and L
m
(SUP/G) = K
if and only if K is mixed-observable, (L(G),Σ
uc
)-
controllable and L
m
(G)-closed.
4.3 Example
We return to the example of Sect. 3.3 represented
in Fig. 4. The specification is mixed-observable be-
cause P
σ
(E
σ
)∩P
σ
(D
σ
) = {a
1
a
2
}∩{a
2
a
1
} =
/
0. Since
the specification is also (L(G),Σ
uc
)-controllable and
L
m
(G)-closed, then from Theorem 1, there exists a
nonblocking mixed supervisor that controls the plant
so that it respects the specification. An example of
such a mixed supervisor is given by Eq. (2).
5 COMPARISON WITH OTHER
ARCHITECTURES
As in Theorem 1 for the mixed architecture, the
class of languages achievable by any control archi-
tecture is characterized by three notions: (L (G), Σ
uc
)-
controllability, L
m
(G)-closure and a notion of observ-
ability. Since (L(G),Σ
uc
)-controllability and L
m
(G)-
closure are independent of the considered architec-
ture, we can compare control architectures by com-
paring their respective observabilities.
5.1 Comparison with the Centralized
Control
The observability of a specification K in a centralized
architecture, which we denote cent-observability, is
defined as follows, where P is the projection on the
observable alphabet Σ
o
: ∀σ ∈ Σ
c
: P(E
σ
)∩P(D
σ
) =
/
0.
Since Σ
σ
⊆ Σ
o
for every σ ∈ Σ
c
, mixed-
observability implies cent-observability. Therefore,
the class of languages achievable with the centralized
architecture subsumes the class of languages achiev-
able with the mixed architecture.
We return to the example of Sect. 3.3 represented
in Fig. 4, where we make the following modifica-
tions: Σ
c,1
= Σ
c,3
= Σ
c
= {σ} and Σ
c,2
=
/
0, and hence
I
σ
= {1,3}. Since Σ
o
= {a
1
,a
2
,a
3
}, we have P(E
σ
) =
E
σ
= {a
1
a
2
a
3
} and P(D
σ
) = D
σ
= {a
2
a
1
a
3
}. Hence,
P(E
σ
) ∩ P(D
σ
) =
/
0, that is, the specification is cent-
observable. The observable alphabet of FM
σ
is
now Σ
σ
= {a
1
,a
3
}, P
σ
(E
σ
) = {a
1
a
3
} and P
σ
(D
σ
) =
{a
1
a
3
}. Hence, P
σ
(E
σ
) ∩ P
σ
(D
σ
) = {a
1
a
3
} ̸=
/
0, that
is, the specification is not mixed-observable.
Intuitively, since it observes
Σ
o
=
{
a
1
,
a
2
,
a
3
}
, a
centralized supervisor can distinguish the sequences
a
1
a
2
a
3
and a
2
a
1
a
3
, where distinct decisions must be
taken on σ. On the other hand, a mixed supervi-
sor cannot distinguish these two sequences because
it does not observe a
2
.
5.2 Comparison with Conventional
Decentralized Control
Let us consider any conventional decentralized archi-
tecture and denote by coobservability the correspond-
ing notion of observability. A sufficient condition that
a specification K is not coobservable is the existence
of a pair of sequences necessitating distinct decisions
and which cannot be distinguished by the local obser-
vations. More formally:
K coobservable ⇒ (∀σ∈Σ
c
)
(∀λ∈ E
σ
,∀µ ∈D
σ
)(∃i∈ I
σ
) : P
i
(λ)̸= P
i
(µ)
(3)
On the other hand, from the fact that ∀σ ∈ Σ
c
,∀i ∈
I
σ
: Σ
o,i
⊆ Σ
σ
, we deduce that:
(∀σ∈ Σ
c
)(∀i∈ I
σ
)(∀λ,µ ∈Σ
∗
) :
(P
i
(λ) ̸= P
i
(µ)) ⇒ (P
σ
(λ)̸= P
σ
(µ))
(4)
Equations (3,4) imply the following equation:
K coobservable ⇒
(∀σ∈ Σ
c
)(∀λ∈ E
σ
,∀µ ∈D
σ
) : P
σ
(λ)̸= P
σ
(µ)
(5)
From Def. 5 and Eq. (5), we have: coobservabil-
ity implies mixed-observability, from which we de-
duce that the class of languages achievable with the
mixed architecture subsumes the class of languages
achieved by any conventional decentralized architec-
ture. Hence, assumption 2 is not restrictive.
Let us return to the example of Section 3.3 repre-
sented in Figure 4. We have shown in Section 4.3
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
286

that the specification is mixed-observable. On the
other hand, for λ = a
1
a
2
a
3
∈ E
σ
,µ = a
2
a
1
a
3
∈ D
σ
, we
have P
1
(λ) = P
1
(µ) and P
2
(λ) = P
2
(µ). From Eq. (3),
we deduce that the specification is not coobservable
in conventional decentralized control. Therefore, no
conventional decentralized architecture can achieve
the specification of this example.
6 CONCLUSION
We have proposed a decentralized controlled archi-
tecture, called mixed architecture, where the local su-
pervisors are simple local observers, while all com-
putations of decisions are made by the fusion mod-
ules which are conceptually equivalent to centralized
supervisors. We prove that this approach is realistic
and that it is simpler and more general than conven-
tional decentralized control. Actually, this idea has
already been studied in (Khoumsi and Chakib, 2008),
but the corresponding developed architecture was in-
decidable, due to the fact that the plant was not as-
sumed slower than the control systems.
In a near future, we intend to study the applica-
bility of the mixed architecture in complex real life
system.
REFERENCES
Chakib, H. and Khoumsi, A. (2011). Multi-decision Su-
pervisory Control: Parallel Decentralized Architec-
tures Cooperating for Controlling Discrete Event Sys-
tems. IEEE Transactions on Automatic Control,
56(11):2608–2622.
Cieslak, R., Desclaux, C., Fawaz, A., and Varaiya, P.
(1988). Supervisory control of discrete event pro-
cesses with partial observations. IEEE Transactions
on Automatic Control, 33(3):249–260.
Jiang, S. and Kumar, R. (2000). Decentralized control of
discrete event systems with specializations to local
control and concurrent systems. IEEE Transactions
on Systems, Man, and Cybernetics, Part B, 30(5):653–
660.
Khoumsi, A. and Chakib, H. (2008). A New Architecture
for Decentralized Control of Discrete Event Systems:
Decidability and Synthesis Issues. In 8
`
eme conf. fran-
cophone de MOd
´
elisation et SIMulation (MOSIM),
Paris, France.
Kumar, R. and Takai, S. (2007). Inference-Based
Ambiguity Management in Decentralized Decision-
Making: Decentralized Control of Discrete Event
Systems. IEEE Transactions on Automatic Control,
52(10):1783–1794.
Lin, F. and Wonham, W. M. (1988). Decentralized super-
visory control of discrete event systems. Information
Sciences, 44:199–224.
Lin, F. and Wonham, W. M. (1990). Decentralized con-
trol and coordination of discrete-event systems with
partial observation. IEEE Transactions on Automatic
Control, 35(12):1330–1337.
Overkamp, A. and van Schuppen, J. H. (2001). Maximal
solutions in decentralized supervisory control. SIAM
Journal on Control and Optimization, 39(2):492–511.
Prosser, J. H., Kam, M., and Kwatny, H. G. (1997). Deci-
sion fusion and supervisor synthesis in decentralized
discrete-event systems. In American Control Confer-
ence (ACC), pages 1313–1319.
Ramadge, P. J. and Wonham, W. M. (1987). Supervisory
control of a class of discrete event processes. SIAM J.
Control and Optimization, 25(1):206–230.
Ricker, S. and Rudie, K. (2000). Know means no: Incor-
porating knowledge into discrete-event control sys-
tems. IEEE Transactions on Automatic Control,
45(9):1656–1668.
Ricker, S. L. and Rudie, K. (2007). Knowledge is a terri-
ble thing to waste: using inference in discrete-event
control problems. IEEE Transactions on Automatic
Control, 52(3):428–441.
Rudie, K. and Willems, J. C. (1995). The computa-
tional complexity of decentralized discrete event con-
trol problems. IEEE Transactions on Automatic Con-
trol, 40(7):1313–1319.
Rudie, K. and Wonham, W. M. (1992). Think globally,
act locally: decentralized supervisory control. IEEE
Transactions on Automatic Control, 31(11):1692–
1708.
Yoo, T.-S. and Lafortune, S. (2002). A General Architecture
for Decentralized Supervisory Control of Discrete-
Event Systems. Discrete Event Dyna. Syst.: Theory
Applicat., 12:335–377.
Yoo, T.-S. and Lafortune, S. (2004). Decentralized Supervi-
sory Control With Conditional Decisions: Supervisor
Existence. IEEE Transactions on Automatic Control,
49(11):1886–1904.
DecentralizedSupervisoryControlofDiscreteEventSystems-MovingDecisionsClosertoActions
287
