
Prediction of Movements by Online Analysis of Electroencephalogram
with Dataflow Accelerators
Hendrik Woehrle
1
, Johannes Teiwes
2
, Marc Tabie
1,2
, Anett Seeland
1
, Elsa Andrea Kirchner
1,2
and Frank Kirchner
1,2
1
German Research Center for Artificial Intelligence (DFKI), Robotics Innovation Center, Bremen, Germany
2
AG Robotik, University of Bremen, Bremen, Germany
Keywords:
Brain Computer Interfaces, Mobile Systems, FPGA, Hardware Accelerator.
Abstract:
Brain Computer Interfaces (BCIs) allow to use psychophysiological data for a large range of innovative appli-
cations. One interesting application for rehabilitation robotics is to modulate exoskeleton controls by predict-
ing movements of a human user before they are actually performed. However, usually BCIs are used mainly in
artificial and stationary experimental setups. Reasons for this are, among others, the immobility of the utilized
hardware for data acquisition, but also the size of the computing devices that are required for the analysis of
the human electroencephalogram. Therefore, mobile processing devices need to be developed. A problem
is often the limited processing power of these devices, especially if there are firm time constraints as in the
case of movement prediction. Field programmable gate array (FPGA)-based application-specific dataflow ac-
celerators are a possible solution here. In this paper we present the first FPGA-based processing system that
is able to predict upcoming movements by analyzing the human electroencephalogram. We evaluate the sys-
tem regarding computation time and classification performance and show that it can compete with a standard
desktop computer.
1 INTRODUCTION
The prediction of human movements by online anal-
ysis of the electroencephalogram (EEG) is a frequent
task in Brain Computer Interfaces (BCIs). The pre-
diction of movements can be used in various applica-
tions, such as assistive devices like orthoses and re-
habilitation robotics (Pfurtscheller, 2000; Ahmadian
et al., 2013; Kirchner et al., 2013a; Kirchner et al.,
2013c) or in telemanipulation devices (Folgheraiter
et al., 2011; Folgheraiter et al., 2012; Seeland et al.,
2013; Lew et al., 2012).
Different event related patterns can be found in the
EEG before a movement is actually performed. These
are usually related to neuronal processes related to
movement preparation e.g. specific frequency com-
ponents in the EEG reflecting neural synchronization
or desynchronization (ERD/ERS) (Bai et al., 2011) or
movement related cortical potentials (MRCPs) such
as the lateralized readiness potential (LRP) (Blankertz
et al., 2006).
However, for a reliable detection of upcoming
movements a range of complex signal processing
methods have to be applied to detect the relevant po-
tentials in the raw data. Obviously, all these opera-
tions have to be performed online and in real-time,
i.e. the movement predictions have to be available be-
fore the real movements are executed in order to be
useful in applications.
1.1 Mobile and Miniaturized Brain
Computer Interfaces
Many applications require that the signal processing
is performed in small devices that are embedded into
the specific environment. For different medical pur-
poses or rehabilitation approaches the disappearance
of computing devices by means of an integration of
these computers into anyway present medical devices
or other equipment would be beneficial.
In order to integrate the computing devices into
other systems, they need to have small physical di-
mensions and a low power consumption (in order to
be able to use small accumulators). However, since
the employed signal processing operations for the de-
tection of specific patterns or potentials in EEG data
are often computationally expensive, current mobile
31
Wöhrle H., Teiwes J., Tabie M., Seeland A., Kirchner E. and Kirchner F..
Prediction of Movements by Online Analysis of Electroencephalogram with Dataflow Accelerators.
DOI: 10.5220/0005139400310037
In Proceedings of the 2nd International Congress on Neurotechnology, Electronics and Informatics (NEUROTECHNIX-2014), pages 31-37
ISBN: 978-989-758-056-7
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)
BCI systems rely only on a small number of elec-
trodes (Wang et al., 2013; Webb et al., 2012) which
are sufficient for simple approaches that are based on,
e.g., the detection of steady-state visually evoked po-
tentials (Wang et al., 2013; Chi et al., 2012). Even
field programmable gate array (FPGA)-based systems
have these shortcomings (Khurana et al., 2012; Shyu
et al., 2013).
These approaches are not sufficient if patterns
must be detected that require the usage of several elec-
trodes as it likely is the case in complex rehabilita-
tion or telemanipulation applications (Kirchner et al.,
2013b). Accordingly, specialized signal-processing
systems that use complex algorithms and apply these
in an online-fashion and real-time are needed here.
1.2 Overview about the Paper
In this paper we show the first system that fulfills the
mentioned requirements by using application-specific
dataflow accelerators which are realized as hardware
components in programmable logic. In Section 2, the
general hard- and software architecture is described.
Subsequently, in Section 3 we present the experimen-
tal procedures that were employed to acquire data that
we used for the evaluation of the system. The ob-
tained results of the evaluation are then discussed in
Section 4. The conclusion and future directions are
finally given in Section 5.
2 HARD- AND SOFTWARE
ARCHITECTURE
The application that is considered here results in two
types of requirements. On the one hand side, the
system for movement prediction has to be included
into a complex environment, communicate with dif-
ferent other systems and provide various features for
users like e.g. data recording and provision of con-
figuration options. The functionalities to fulfill these
requirements are very diverse, but usually not time-
critical nor computationally expensive. Accordingly,
we implement these in software (SW). On the other
hand, a fixed set of signal processing algorithms has
to be applied in a very short time frame for the data-
analysis. Hence, we implement this part of the system
as application-specific dataflow accelerators (DFAs),
which can be realized as hardware components by
programmable logic.
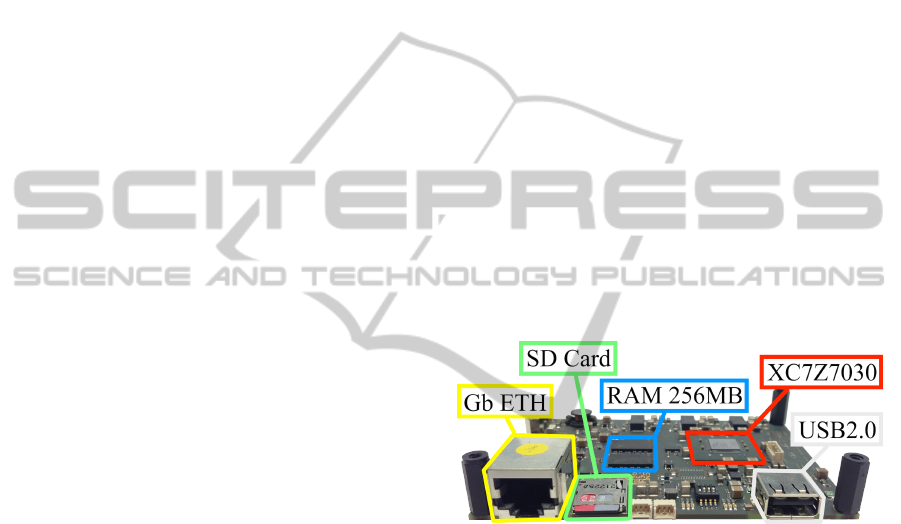
2.1 Hardware and Electronics
Architecture
We developed our own electronics device ZynqBrain
that we used as the central platform for processing
in our experiments (Figure 1). The printed circuit
board that is used for the ZynqBrain is manufactured
in Pico-ITX format (7cm×10cm size). The main
component is a Xilinx Zynq 7030 processing platform
that consists of a Dual-Core ARM Cortex-A9 proces-
sor (operating at 666 MHz) and a programmable logic
(PL) section (operating at 100 MHz in our setup),
and is therefore well-suited for the required SW/HW
partitioning of our system. The device contains an
USB interface in order to be able to connect it di-
rectly to typical EEG-acquisition hardware, a SDHC
card interface to store the software and EEG data,
as well as a Gigabit Ethernet interface in order to
transfer either data or results to other systems. Fur-
thermore, the device contains low voltage differential
signaling (LVDS) based interfaces to extend it in fu-
ture with complemental electronics boards. The CPU
runs a customized linux kernel (version 3.12) with a
Linaro (Linaro, 2013) user space.
Figure 1: The ZynqBrain electronics board (pico-ITX form
factor, 100 × 72 mm) with highlighted central components.
2.2 Software Architecture
Since the device is able to run usual software on the
CPU part, it is able to use the signal processing soft-
ware framework pySPACE (Krell et al., 2013) as the
high-level processing and infrastructure software in
our system. It contains modules for signal process-
ing and machine learning as well as modules for ser-
vice functionalities, e.g. configuration of the data ac-
quisition or read previously stored data and to per-
form evaluations and store the results. Numpy and
Scipy (Jones et al., 2001) are used by pySPACE as li-
braries, for e.g. matrix algebra and filtering (in case
they were performed in SW, e.g. for comparison).
2.3 Dataflow Hardware Accelerator
The PL-section of the Z7030 can be utilized as an
FPGA, i.e. it can be configured so that parts of it work
NEUROTECHNIX2014-InternationalCongressonNeurotechnology,ElectronicsandInformatics
32
as a specialized hardware component. Since these
are specialized on performing a specific task, they are
usually more efficient than a corresponding software
implementation. We defined DFAs that implement
exactly the signal processing and machine learning
algorithms that are required for the online movement
prediction. While the generic software tasks are exe-
cuted on the CPU, the actual execution of the signal
processing tasks are delegated to the PL part. The
signal processing inside the FPGA uses a static data-
flow principle, i.e. the hardware accelerator is imple-
mented by a set of fixed circuits and the data is trans-
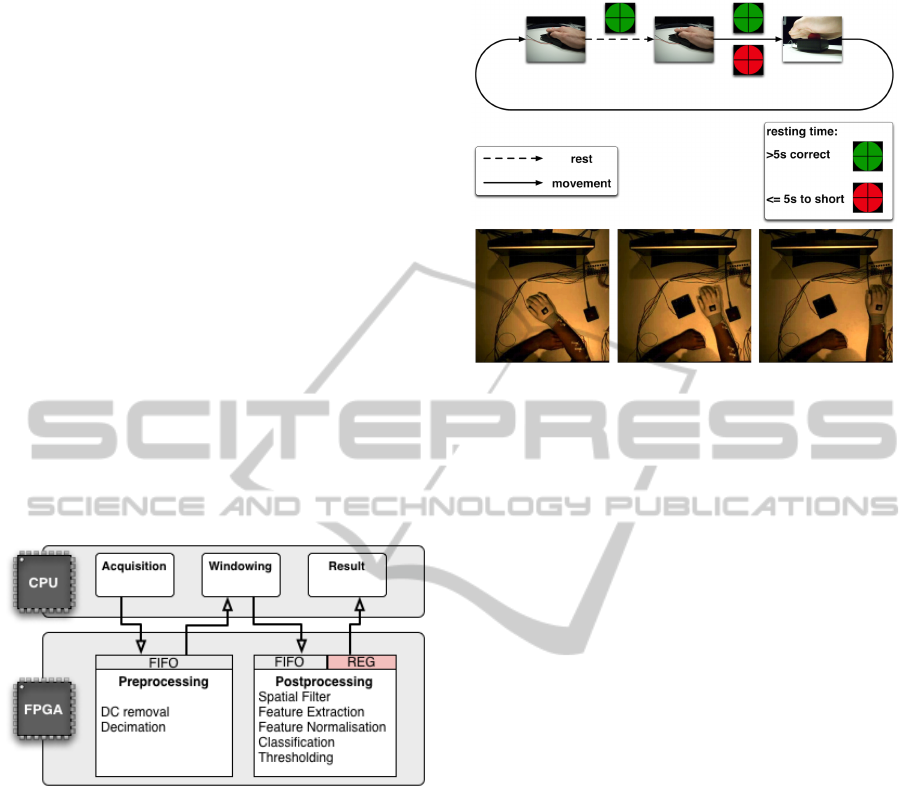
formed while flowing through them. Figure 2 shows
the data flow between software and hardware parti-
tions. The DFAs are connected to the host CPU via
AXI-Lite busses. Different parameters can be config-
ured using a set of software-accessible registers. In
order to process the EEG data, it is copied into the
input FIFO buffers and the results are collected from
the output FIFO buffers or result register. This setup
has the advantage that the host CPU is not involved in
the computations which are performed in the DFAs,
and is therefore not occupied by these.
Figure 2: Dataflow among the CPU and FPGA part in the
mobile setup with DFAs.
3 EXPERIMENTAL EVALUATION
In order to evaluate our system regarding prediction
accuracy and processing speed, we assembled an ex-
perimental setup that allows us to compare true move-
ment onsets to the predictions of the EEG-based sys-
tem. Therefore, we evaluated our system with data
that was acquired in a setup described in the follow-
ing.
3.1 Experimental Setup
Eight healthy male subjects (age 29.9 ± 3.3 years)
with normal or corrected to normal vision participated
in this study. All participants gave written consent
for participation and the study was approved by the
Figure 3: Illustration of the conducted experiments. Top:
visualization of the paradigm. Bottom: three pictures of
the setup, showing from left to right: the resting phase, the
movement phase and the end of the movement.
ethics committee from the University of Bremen. Fig-
ure 3 shows the experimental setup and procedures.
The subjects were seated in a chair in front of a ta-
ble. A monitor, a flat board and a buzzer were placed
on the table. The distance between buzzer and board
was approximately 30 cm. The study consisted of one
recording session per subject, each recording session
was divided into three runs. The subjects were asked
to perform 40 self-paced, voluntary movements of
their right arm from the flat board to the buzzer and
back. For the experimental implementation the soft-
ware Presentation (Neurobehavioral Systems, Inc.)
was used. During the experiments a green circle with
a black fixation cross was shown to the subjects for
minimizing the occurrence of eye-artifacts. The only
restriction within the experiment was a fixed resting
time of at least 5 s in between two consecutive move-
ments. Movements that were performed too early
were reported to the subjects and not taken into ac-
count for data analysis. A run was finished after 40
correct movements. For each subject, three runs were
recorded in each session, resulting in 120 movements.
3.2 Data Acquisition
EEG was recorded at 5000 Hz with a 128 electrode
(extended 10 − 20 system) actiCAP system using four
32 channel BrainAmp DC amplifiers (BrainProducts
GmbH, Munich, Germany). During recording the sig-
nals were filtered between 0.1 and 1000 Hz. Elec-
trodes I1, OI1h, OI2h, and I2 were used for recording
the electrooculogram, which was not considered in
the following analysis. A motion tracking system was
used to track a marker placed on the back of the sub-
PredictionofMovementsbyOnlineAnalysisofElectroencephalogramwithDataflowAccelerators
33

jects right hand. The system consisted of three ProRe-
flex 1000 cameras (Qualisys AB, Gothenburg, Swe-
den). Motions of the hand were sampled at 500 Hz
and a trigger signal was used to synchronize tracking
data and EEG data. The movement onsets were ex-
tracted from the tracking data in an offline analysis.
These movements onsets, however, were only used to
infer the true movement onsets that can serve as a ref-
erence standard for the comparison with EEG-based
predictions in the subsequent evaluations.
3.3 EEG Processing
All described analyses were performed offline and
subject-wise, i.e., a 3-fold cross-validation scheme
was used, where in each split two of the three runs
were used for training of the machine learning and
data-dependent signal processing methods, and the
remaining run for testing. No testing data was used
in the training phase and vice versa. 64 (extended
10 − 20 system) of the 128 EEG channels were used
in the analysis due to performance constraints that ac-
count only to the acquisition of the signals via USB.
All data was processed in SW and in HW in a sim-
ilar manner, i.e. the same algorithms were used and
the time consumption and quality of the results (by
comparing the classification accuracy). However, the
SW implementations used double-precision floating-
point arithmetic, while the HW counterparts are based
on fixed-point arithmetic. The data was preprocessed
in three parts, each consisting of several processing
steps:
3.3.1 Preprocessing
First, the slowly-varying direct current offset was re-
moved by a infinite impulse response filter. Next,
the sampling rate was decimated from 5 kHz to 20 Hz
in two steps (with an intermediate sampling rate of
125 Hz). The anti-alias finite impulse response fil-
ter of the second step was parameterized so that all
frequencies greater than 4.0 Hz were attenuated. The
Xilinx FIR Compiler was used for the finite impulse
response (FIR) filter realization in the HW partition.
3.3.2 Windowing
Before the data can be processed by a spatial filter or
classifier, it must be divided into distinct instances,
that are processed independently from each other.
Therefore, windows of the same length, i.e., 200 ms
of duration were cut out of the data stream. Predic-
tions were performed every 50 ms, so adjacent win-
dows overlapped by 150 ms. For training of the spa-
tial filter, classifier and feature standardization (see
below), the windows of the training phase were la-
beled as related to a movement or to a no movement
phase, based on the movement onsets found in the
motion tracking data. Windows extracted from the in-
terval between −4 s to −1 s were assumed to belong
to the no movement class, and windows from −0.95 s
to 0 s to the movement class. The Passive Aggressive
Perceptron variant 1 (PA-1) (Crammer et al., 2006)
was used for classification. For training of the classi-
fier only the windows [0, −0.2] s and [−0.05, −0.25] s
for the movement class and all of the no movement
class were used, since we assume that these windows
contribute most to the LRP, which the classifier shall
detect (Kirchner et al., 2013a; Kirchner et al., 2013b).
This is especially true for the movement windows
since the LRP has its peak right at the beginning of
a physical movement. Therefore only the two above
mentioned windows close to the physical movement
onset were used as training instances for the move-
ment class. For evaluation purposes, the movement
has to be detected within −1 s to −0.05 s. Before that,
windows account for the no movement class and after
that for the movement class.
3.3.3 Feature Extraction and Classification
For further data reduction the xDAWN spatial fil-
ter (Rivet et al., 2009) was applied to decrease the
number of remaining channels to four, which can be
realized as a matrix multiplication (using DSP48 (Xil-
inx Corporation, 2014) slices if realized in HW). Data
from the remaining channels were merged to one fea-
ture vector and standardized. We used the PA-1 for
classification (which results in the computation of a
dot product - using DSP48 slices in the HW realiza-
tion).
3.4 Evaluation Procedures
As stated above, we used pySPACE (Krell et al.,
2013) for processing and evaluation. We compared
our system with a standard PC that contains an 8-
core Intel(R) Core(TM) i7 CPU 950 that was running
at 3.07GHz and a Linux Mint operating system. We
used four different computing setups in our compari-
son:
1. A single core of the standard desktop PC. In this
case we used only a single CPU core for the pro-
cessing.
2. A multi-core standard desktop PC. In this case we
used the same system as before, but we used all 8
cores in order to apply the anti-alias filter in par-
allel channel-wise. This parallelization was per-
formed using OpenMP (OpenMP, 2014).
NEUROTECHNIX2014-InternationalCongressonNeurotechnology,ElectronicsandInformatics
34
(I) Intel, 1 Core (II) Intel, 8 Cores (III) ARM (IV) ARM + DFA
0
200
400
600
800
1000
1200
1400
Computation Time [ms]
(A) Processing Times for Different Devices in Comparison
Preprocessing
Prediction
(V) ARM + DFA
0
20
40
60
80
100
Computation Time [ms]
(B) Processing and Transfer Time in Detail
FEC-C
FEC-T
PP-C
PP-T
SW only SW + DFA
0.70
0.75
0.80
0.85
0.90
0.95
1.00
Classification Performance [BA]
(C) Classification Performance for SW and HW
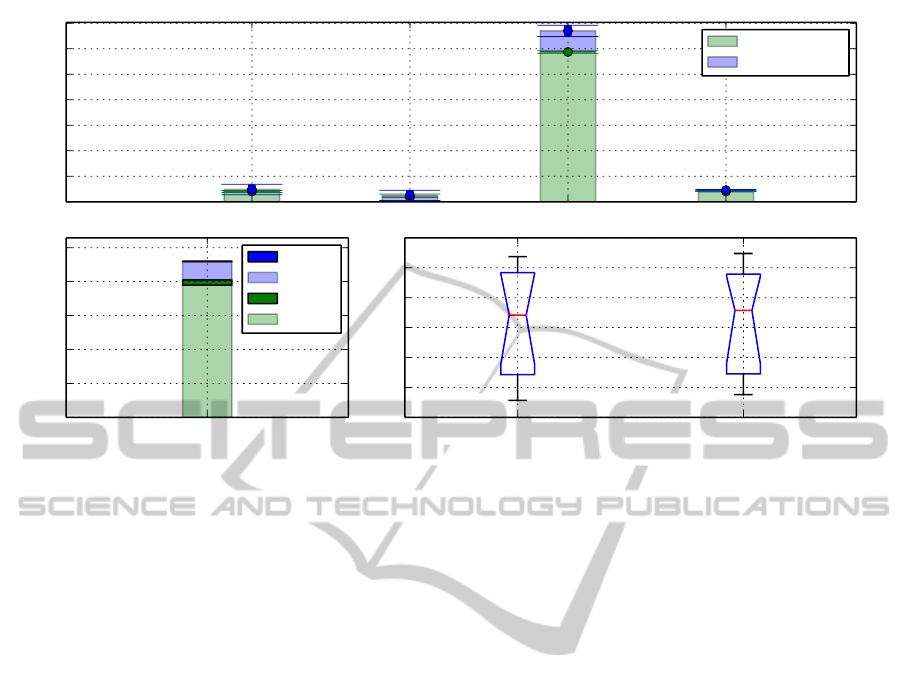
Figure 4: Classification and computation time performance for different computing setups for the analysis of 1 s of EEG data.
(A): processing time for different computing devices; (B:) more detailed description of the computation/data transfer times if
the DFAs are used (with PP-T: time for the data transfer to and from the DFA of the preprocessing part, PP-C: for the actual
computations, FEC-T and FEC-C: corresponding times for the feature extraction and classification part; (C) classification
accuracy for software only and software for high level tasks and signal processing tasks performed in the DFAs.
3. A single core of a mobile CPU. In this case we
used only the ARM CPU part of the Zynq SoC.
4. The mobile CPU combined with application spe-
cific dataflow accelerators that are realized as
hardware components in the programmable logic
partition of the Zynq. The basic setup was as be-
fore, but the data processing was performed using
the DFAs.
We used different schemes for SW/HW mapping,
depending on the evaluation procedure:
• Cases 1 to 3: without DFA. In this case the high
level data preprocessing, feature extraction and
classification in the training as well as in the ap-
plication phase was completely executed in SW.
• Case 4: with DFA. The preprocessing as well as
the feature extraction and the classification in the
test phase were performed using the DFA. How-
ever, the computation of the data-dependent pa-
rameters in the training phase were computed in
SW.
4 RESULTS AND DISCUSSION
The results regarding the balanced classification accu-
racy (BA) and processing times are shown in Figure 4.
The times correspond to the time that is required to
process 1 s of EEG data in order to relate the different
parts of the processing (preprocessing and to perform
20 predictions, since one prediction is performed ev-
ery 50 ms).
It can be observed that the processing times of the
desktop PC are fast enough for online prediction (A),
i.e. they require less than 1 s of time to process 1 s of
EEG data, which is not the case for the mobile proces-
sor. However, if the DFAs are used, the computation
times can be dramatically reduced and the time con-
straints for real-time prediction are met. As shown
in (B), most time is consumed for the data transfer,
and not for the computations themselves. We expect
that this can be accelerated in the future by using di-
rect memory access for the data transfer in order to
further decrease the latency.
Since fixed-point computations are used inside the
DFAs, a major concern was that this might compro-
mise the prediction accuracy. As shown in (C), this
is not the case - the classification accuracy is not af-
fected by the fixed point computations.
The performed evaluations were performed in a
quite artificial setup that was designed in order to
eliminate any kind of disturbances that could cause
artifacts in the EEG data and to be able to reliably de-
termine movement onsets with different methods as
a gold reference for the evaluation process. How-
ever, the methodology for the detection of the MR-
CPs was already successfully applied in other, more
challenging real-world application, i.e. the usage of
MRCP-based movement prediction to enhance the
PredictionofMovementsbyOnlineAnalysisofElectroencephalogramwithDataflowAccelerators
35

user-experience of an exoskeleton by adapting the
control algorithms (Seeland et al., 2013). Therefore,
a required next step is the integration and application
of the developed device in such an environment.
5 CONCLUSIONS AND FUTURE
WORK
We showed that it is possible to use FPGA-based
application-specific DFAs for the online analysis of
the EEG in order to predict movements of humans
before they are executed. We showed that the fixed-
point arithmetic of the DFAs does not compromise
the classification accuracy, but instead results in a
high speedup of the processing time (in comparison
with the mobile CPU without DFAs). This will allow
us to integrate our systems into complex applications
like robotic rehabilitation scenarios (Kirchner et al.,
2013a).
In the future, we want to 1) enhance our sys-
tem further by accelerating the data transfer to the
DFAs by using direct memory access, 2) extend our
system to multi-modal data processing, i.e., integrate
the analysis of other physiological signals like the
EMG (Kirchner et al., 2013c) into the system and al-
low the detection of other potentials, such as the P300
event related potential, 3) achieve user independence
by integrating adaptive methods, and 4) use the device
in more challenging real-world applications, e.g., in-
tegrate the Zynqbrain into an exoskeleton to perform
embedded movement prediction.
ACKNOWLEDGEMENTS
Work was funded by the German Ministry of Eco-
nomics and Technology (grant no. 50 RA 1011 and
grant no. 50 RA 1012).
REFERENCES
Ahmadian, P., Cagnoni, S., and Ascari, L. (2013). How ca-
pable is non-invasive EEG data of predicting the next
movement? A mini review. Frontiers in Human Neu-
roscience.
Bai, O., Rathi, V., Lin, P., Huang, D., Battapady, H., Fei, D.-
Y., Schneider, L., Houdayer, E., Chen, X., and Hallett,
M. (2011). Prediction of human voluntary movement
before it occurs. Clinical Neurophysiology.
Blankertz, B., Dornhege, G., Lemm, S., Krauledat, M., Cu-
rio, G., and M
¨
uller, K.-R. (2006). The Berlin Brain-
Computer Interface: machine learning based detec-
tion of user specific brain states. Journal of Universal
Computer Science.
Chi, Y. M., Wang, Y.-T., Wang, Y., Maier, C., Jung, T.-P.,
and Cauwenberghs, G. (2012). Dry and noncontact
EEG sensors for mobile brain-computer interfaces.
Neural Systems and Rehabilitation Engineering, IEEE
Transactions on.
Crammer, K., Dekel, O., Keshet, J., Shalev-Shwartz, S.,
and Singer, Y. (2006). Online passive-aggressive al-
gorithms. J. Mach. Learn. Res.
Folgheraiter, M., Jordan, M., Straube, S., Seeland, A., Kim,
S. K., and Kirchner, E. A. (2012). Measuring the im-
provement of the interaction comfort of a wearable ex-
oskeleton. International Journal of Social Robotics.
Folgheraiter, M., Kirchner, E. A., Seeland, A., Kim, S. K.,
M., J., Woehrle, H., Bongardt, B., Schmidt, S., Albiez,
J., and Kirchner, F. (2011). A multimodal brain-arm
interface for operation of complex robotic systems and
upper limb motor recovery. In Proceedings of the 4th
International Conference on Biomedical Electronics
and Devices (BIODEVICES-11).
Jones, E., Oliphant, T., and Peterson, P. (2001). SciPy:
Open source scientific tools for Python.
Khurana, K., Gupta, P., Panicker, R. C., and Kumar, A.
(2012). Development of an FPGA-based real-time
P300 speller. In 22nd International Conference on
Field Programmable Logic and Applications (FPL).
Kirchner, E. A., Albiez, J., Seeland, A., Jordan, M., and
Kirchner, F. (2013a). Towards assistive robotics for
home rehabilitation. In Proceedings of the 6th Inter-
national Conference on Biomedical Electronics and
Devices (BIODEVICES-13), Barcelona.
Kirchner, E. A., Kim, S. K., Straube, S., Seeland, A.,
Woehrle, H., Krell, M. M., Tabie, M., and Fahle, M.
(2013b). On the applicability of brain reading for pre-
dictive human-machine interfaces in robotics. PLoS
ONE.
Kirchner, E. A., Tabie, M., and Seeland, A. (2013c). Mul-
timodal movement prediction - towards an individual
assistance of patients. PLoS ONE.
Krell, M. M., Straube, S., Seeland, A., Woehrle, H., Tei-
wes, J., Metzen, J. H., Kirchner, E. A., and Kirchner,
F. (2013). pySPACE - A Signal Processing and Clas-
sification Environment in Python. Frontiers in Neu-
roinformatics.
Lew, E., Chavarriaga, R., Silvoni, S., and Mill
´
an, J. D. R.
(2012). Detection of self-paced reaching movement
intention from EEG signals. Frontiers in Neuroengi-
neering, 5:13.
Linaro (2013). Open source software for ARM SoCs. Tech-
nical report.
OpenMP (2014).
Pfurtscheller, G. (2000). Brain oscillations control hand
orthosis in a tetraplegic. Neuroscience Letters,
292(3):211–214.
Rivet, B., Souloumiac, A., Attina, V., and Gibert, G. (2009).
xDAWN algorithm to enhance evoked potentials: Ap-
plication to brain computer interface. Biomedical En-
gineering, IEEE Transactions on.
NEUROTECHNIX2014-InternationalCongressonNeurotechnology,ElectronicsandInformatics
36

Seeland, A., Woehrle, H., Straube, S., and Kirchner, E. A.
(2013). Online movement prediction in a robotic ap-
plication scenario. In 6th International IEEE/EMBS
Conference on Neural Engineering (NER).
Shyu, K.-K., Chiu, Y.-J., Lee, P.-L., Lee, M.-H., Sie, J.-J.,
Wu, C.-H., Wu, Y.-T., and Tung, P.-C. (2013). To-
tal design of an FPGA-based brain-computer interface
control hospital bed nursing system. Industrial Elec-
tronics, IEEE Transactions on.
Wang, Y.-T., Wang, Y., Cheng, C.-K., and Jung, T.-P.
(2013). Developing stimulus presentation on mobile
devices for a truly portable SSVEP-based BCI. In En-
gineering in Medicine and Biology Society (EMBC),
35th Annual International Conference of the IEEE.
Webb, J., Xiao, Z.-G., Aschenbrenner, K. P., Herrnstadt,
G., and Menon, C. (2012). Towards a portable as-
sistive arm exoskeleton for stroke patient rehabilita-
tion controlled through a brain computer interface. In
Biomedical Robotics and Biomechatronics (BioRob),
4th IEEE RAS EMBS International Conference on,
pages 1299–1304.
Xilinx Corporation (2014). UG479: 7 Series DSP48E1
Slice User Guide.
PredictionofMovementsbyOnlineAnalysisofElectroencephalogramwithDataflowAccelerators
37
