
Integrating Knowledge Artifacts and Inertial Measurement Unit Sensors
for Decision Support
Stefano Pinardi, Fabio Sartori and Riccardo Melen
Department of Computer Science, Systems and Communication, University of Milano-Bicocca,
viale Sarca 336, Milan, Italy
Keywords:
Inertial Measurement Unit, Android, Wearable Devices, Recommendation Systems, Knowledge Artifacts.
Abstract:
Modern wearable devices provide new opportunities for the development of knowledge artifacts and decision
support systems. In this paper we present a recent development of KAFKA, a knowledge engineering method-
ology based on knowledge artifact notion, that make it able to manage real-time data detected and analyzed
by means of Inertial Measurement Units sensors, mounted on Android wearables. This improvement makes
KAFKA suitable to deal with many domains where real-time data are necessary, in particular the health-care
and rehabilitation ones.
1 INTRODUCTION
Today, Wearable devices and Smartphones offer a
great variety of sensors on board: ambient and
body-temperature sensors, heart beat rate sensors,
light presence sensors, barometric pressure sensors,
and also Inertial Measurement Units (IMUs) sensors.
IMUs have shown to be of particular importance in
the field of situations assessment to determine body
movements and type of executed actions (Bao, 2003;
Avci et al., 2010). However, a lot must be still done
in real case scenarios when the context may require
either real-time abilities of analysis, and algorithms
at the state of the art, or a neat and akin knowledge
of the problems specific to the application domain.
In this case the definition of information quality is
a parameter not independent from the contingency
of the situations: the quality of the data, the desired
parameters, the “degree of freedom” given by actu-
ally used technology, and the specificities of the ap-
plication domain, are all components that influence
the final result. In this paper, we propose the inte-
gration of IMUs and Knowledge Artifacts for the de-
velopment of time-evolving expert systems (Sartori
and Melen, 2015), in order to analyze the data stream
collected by wearables and transform it in valuable
suggestions for the user. The result is a unique con-
ceptual and computational framework that can be ex-
ploited in many domains. In particular, we are inter-
ested in developing recommendation systems for the
promotion of physical activity in people risking car-
diovascular diseases. In this context, the hybrid ap-
proach proposed in this paper should allow to moni-
tor the accomplishment of a given activity, evaluating
the quality of it and proposing a personalized training
program for the future. The rest of the paper is or-
ganized as follows: section 2 briefly review literature
about knowledge artifacts and IMUs, according to pa-
per scopes. Sections 3 and 4 introduce the motivation
of the presented work, that is improving the perfor-
mance of the KAFKA KA-User component. Section
5 and 6 explain how this point has been from both the
conceptual and computational point of view. Section
7 presents the typical application scenario of the im-
proved KAFKA framework. Finally, conclusions and
future works are briefly pointed out in section 8.
2 RELATED WORK
Holsapple and Joshi (2001) described knowledge ar-
tifacts as objects that convey or hold usable repre-
sentations of knowledge. Accordingly,Salazar-Torres
et al. (2008) argued that KAs are artifacts which rep-
resent executable encodings of knowledge, which can
be suitably embodied as computer programs. Cab-
itza and Locoro (2014) grouped KA experiences into
five conceptual clusters, where different KAs are used
with different scopes, on the basis of objectivity and
situativity dimensions: Artificial Intelligence (AI-
KAs from now on), Knowledge Management, Com-
puter Supported Cooperative Learning, Information
Pinardi, S., Sartori, F. and Melen, R.
Integrating Knowledge Artifacts and Inertial Measurement Unit Sensors for Decision Support.
DOI: 10.5220/0006091203070313
In Proceedings of the 8th International Joint Conference on Knowledge Discovery, Knowledge Engineering and Knowledge Management (IC3K 2016) - Volume 3: KMIS, pages 307-313
ISBN: 978-989-758-203-5
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
307
Systems and Computer Supported Cooperative Work.
Here, we are mainly interested in AI-KAs, devoted to
design and implement decision support systems, ex-
pert systems and ontologies. In that classification, AI-
KAs where lacking from the situativity point of view,
meaning that they are less able to adapt to the context
and situation at hand. This means that they cannot
be applied in domains characterized by huge amounts
of real-time data, where other kinds of KAs have
been successfully applied in the past, like Health-Care
(Cabitza et al., 2015). In the following, we propose
the integration of IMUs and AI-KAs to overcome this
limitation. IMUs can be used either i) to determine
biomechanical parameters of the body movements or
ii) to detect information about movements, with the
aim to devise the state of the person. Using new re-
cent approaches IMUs can also be used iii) to un-
derstand more complex aspects of the body move-
ments, like the motion grammar (Pinardi and Bisiani,
2010; Mileo et al., 2009). In general, type and quality
of movements are recognized by means of classifica-
tion and pattern recognition methods, like Clustering,
Bayesian rules, Hidden Markov Models (Bao, 2003;
Avci et al., 2010), and even using reasoning rules
(Bisiani et al., 2013; Mileo et al., 2010). In the follow-
ing, we focus on the first and second aspects of body
movement recognition, to detect the pre-determinants
useful to understand the situation. In particular, we
will describe an n-tier application which acquires bio-
mechanical parameters, transforms them and graphi-
cally represent them at run-time. These data are then
analyzed and, finally,stored for future use by AI-KAs,
to develop decision support systems in the Health-
Care application domain, where the suggestions are
tailored on the user behavior.
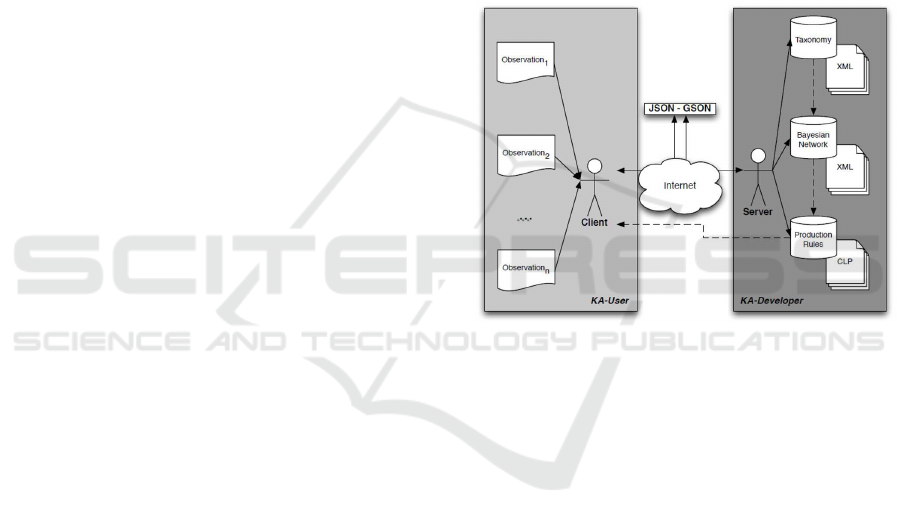
3 MOTIVATION
Figure 1 shows the architecture of KAFKA, namely
Knowledge Acquisition Framework based on Knowl-
edge Artifacts. It is developed according to the client-
server paradigm, where the client, i.e. the KA-User, is
responsible for detecting data and observations about
the environmentand the server, i.e. the KA-Developer
is responsible for the interpretation of these data on
the basis of a three-tier knowledge representation
model (Sartori and Melen, 2015). Till now, greater ef-
forts have been spent on the design of KA-Developer,
being able to automatically create a rule-based sys-
tem from scratch in case of significant changes in
the knowledge domain (Melen et al., 2015). These
changes are mainly due to new observations made
by the KA-User: in the current implementation of
KAFKA, these changes are manually detected by
the user on the field and sent to the KA-Developer
through a JSON interface. In this paper we present
a rethinking of the client side of KAFKA, where the
data observations come from wearables. Doing so,
the KA-User is provided with “intelligence” too, dif-
ferent from the past. Possible values of system in-
puts are the result of wearable sensors querying: the
data are then interpreted and stored to be exploited
by the KA-Developer in the decision making process.
In this way, KAFKA is able to manage new kinds
of data, related to the real-time status of the person
equipped with wearable devices. These data can then
be transformed into useful inputs for recommendation
systems, depending on the application domain.
Figure 1: The multi–layered model of Knowledge Artifact
in KAFKA.
4 KA-User IMPROVEMENT: THE
IMU ROLE
As briefly introduced above, the aim of this paper
is exploiting wearable devices to collect data about
a given application domain, increasing significantly
the role of KA-User in the development of recom-
mendation systems through KAFKA. The challenge
is demonstrating how a KA-User provided with sim-
ple and relatively low-cost technology can become a
crucial source of information in potentially complex
decision making processes. To this aim, it is impor-
tant to point out that the human body is not merely
a virtual mass-point in a physical model, it is a com-
plex articulated-body with joints and body segments,
with related masses and degrees of freedom. Via the
IMUs sensors, it is possible to determine: i) the angu-
lar movements of a joint of the body and its geomet-
rical trajectories, having some a-priori determinants,
i.e. knowing which portion of the body the sensor is
KITA 2016 - 2nd International Workshop on the design, development and use of Knowledge IT Artifacts in professional communities and
aggregations. Knowledge Artifacts as resources in the maker and DIY communities
308

applied to and which exact position it is placed on; ii)
the dynamics of the related motion, i.e. the acceler-
ations and angular velocities to which the segment is
subjected. These data are measured at run-time, and
all information can be stored with their timestamps,
for successive analysis and tests. In particular, we are
interested in four aspects of human body motion: i)
angles and accelerations of the joints, ii) movements
and accelerations of the CoM (Center of Mass) of the
human body, iii) orientation of the spine cord with re-
spect to the vertical position, iv) direction (heading)
of the person, while in motion or not. Semantically
speaking, the motion of the human body is made of
concurrent events (see Figure 2). For example, a per-
son can stay still, turning of 90 degrees on the left, if
he/she is sitting on a swivel chair; or he/she can move
and rotate of 90 degrees on the left, if he/she rounds
the corner walking down a corridor. In this case, mov-
ing and rounding are considered concurrent aspects of
an action. The system should be able to detect all the
concurrent aspects of the body movement to further
combine them into a more complex event. An action
is then composed by a time series of elementary con-
current movement-information and facts.
Figure 2: Determination of the personal state: movement
section.
5 HOW DOES IT WORK?
To devise the motion determinants, IMUs use two ref-
erence systems: one inertial with respect to Earth,
usually called frame G, and a second reference system
co-moving with the sensor, called frame S. In general,
given a reference system S
i
where i indicates the i-th
sensor, it is possible to identify: the angular velocities
around the three axes of S
i
; the rotation angles Φ, χ,
anmd Ψ, namely Yaw, Pitch and Roll, which indicate,
instant by instant, the rotation of the system S
i
with
respect to G, and the instantaneous accelerations of S
i
on the three axes. These raw data can be then used
to precisely determine the motion of the human body,
deriving the motion parameters of its CoM and seg-
ments. Note that the purpose is not to determine the
exact positions of the body segments, which would
require to place a sensor on every body segment (fin-
gers included), but to devise the general state of the
person. In particular, we want to determine the ac-
tivities and actions carried out in a specific context
(drinking, running, climbing the stairs, sitting, etc.).
To this aim, the KA-User is designed according to
a semantically driven rather than geometrically driven
approach: understanding the action semantics is an
important aspect in many application domain, espe-
cially in the medical one, in which the ADLs (Ac-
tivities of Daily Living) are considered an affordable
measure of the capacity of the person to be indepen-
dent.
Figure 3: The data flow architecture.
6 KA-User COMPUTATIONAL
MODEL
Today it is possible to seamlessly use any kind of sen-
sor available on the market mounted in mobile phones
and wrist bands or smart-watches. Market’s low costs
IMUs are valid instruments of measure, with their in-
herent precision and accuracy. Figure 3 shows the
data flow of the KA-User.
The three key components of the architecture are:
1) a set of sensors (each equipped with three-axial
accelerometers, gyroscopes and magnetometers, i.e.
a three-axial IMU) to capture body data movements,
and 2) an Android Smartphone to channel the data
and eventually transport them via Wi-Fi to a Server;
3) a Server that i) stores the data for future analysis, ii)
shows the data for an intuitive visual analysis, and iii)
carries out body information at runtime (or during the
offline analysis). The purpose is the determination of
movement semantic artifacts, useful for situation as-
sessment.
Note that the data and the derived information
of the sensors can be sent to a concentrator or any
other net-component in two possible ways: using
a WSN (Wireless Sensor Network) and, for exam-
Integrating Knowledge Artifacts and Inertial Measurement Unit Sensors for Decision Support
309

Figure 4: Server Side View, On top the tabs of the graphs view, At the center the data (e.g. magnetometer) of both the phone
and smartwatch IMUs, of the given view; bottom-down the state of the person at the current time.
ple, a ZigBee protocol, or using a socket connection
(TCP/IP) over Wi-Fi. Our application was originally
written as a full component of a grid of communi-
cation of a WSN, but the increasing preference of
Wi-Fi/Bluetooth protocol by wearable devices, made
mandatory to use a Wi-Fi/Bluetooth channel for the
communication between components. In the current
KA-User implementation, data are acquired by us-
ing two IMUs respectively present in two commer-
cially available devices: an Android Smartphone with
a three axial IMU, which is usually placed on a belt,
i.e. in the proximity of the CoM of the body; and a LG
W110 G Watch R SmartWatch, worn by the user on
his/her left wrist (but a Microsoft Band or an Apple S
watch will be perfectly usable, too). The code of the
Android smartphone is written in Java and developed
using Android Studio; the code of the smart-watch
is an Android Wear component and contains also a
Bluetooth Energy component for the bands. A com-
ponent for Microsoft Bend was also developed in C#.
The server used for the runtime visualization of the
resulting data and for the data analysis, the most valu-
able component, was developed in C# using Visual
Studio 2015. Communication between the Android
Smartphone and the Server use a TCP/IP socket over
a Wi-Fi channel.
7 AN APPLICATION SCENARIO
A typical example of acquisition is described in the
following: given a person wearing a smartphone on
the belt and the smart-watch on the left wrist, the pur-
pose is to detect in real time, instant by instant, the
position of the body (standing, sitting, laying), the di-
rection (heading) of the person, and the quantity of
movement (the person is still or moving); we want
also to know the path followed by the person from
a specific point, for a few minutes, without having
other sources of information (see Figure 4). Further-
more, we want to know the Hearth Beat Rate of the
person, instant by instant, while the actions are per-
formed. These data are considered pre-determinants
for a more complex description of the person status.
Figure 5 shows the output provided by the KA-
User in response to the first question. Inclination of g
vector with respect to the spinal cord is used to deter-
mine if the person is standing, sitting or laying. The
direction, or heading, is determined using Euler an-
gles, typically the Yaw data, while the quantity of
movement is calculated as a proportion of standard
deviation of the magnitude of the accelerometer. Note
that direction and position of the body requires the a
priori knowledge of the position of the sensor with re-
KITA 2016 - 2nd International Workshop on the design, development and use of Knowledge IT Artifacts in professional communities and
aggregations. Knowledge Artifacts as resources in the maker and DIY communities
310

Figure 5: A KA-User Server Side Data-Example: movements quality and quantity.
spect to the body (i.e. with respect to the G reference
system), while the magnitude is independent by rota-
tions, being a scalar quantity.
To reconstruct the movements of the person in the
space we use a dead reckoning approach: it is im-
portant to remember that dead reckoning approaches,
without any further correction, are subject to errors,
so the reconstructed position tends to separate and to
diverge with respect to the actual position. Hence, any
useful reckoning method requires an external source
of information of position to reconcile the prediction
to the actual position. A Bayesian filter, or an Ex-
tended Kalman Filter is normally used to maintain
consistent the prediction to the real position.
Figure 6 shows the output provided by the KA-
User in response to the second question. Heart Beat
Reat (HBR) simply requires to read the relative data
from the smartwatch that constantly monitor the HBR
of the wrist. This piece of information flows from the
smartwatch to the smartphone, and then goes to the
server where is coupled with the motion information.
Figure 7 show a sketch the final KA-User archi-
tecture on the basis of new improvements. The most
interesting feature is its transformation into client-
server module: the client is made up of hardware and
software components to collect and analyze data, the
server is made of software components to make cor-
rect interpretation of them according to the applica-
tion domain. The client receives real-time data from
sensors placed on wearable devices. The IMU mod-
ule is then responsible for the extraction of useful in-
formation from them: this information is then sent to
the server for next interpretation. Given that the most
interesting feature of the current KA-User implemen-
tation is its capability to automatically query wear-
able devices, it has been provided with a graphical
user interface for manual input by user. This feature
allows recording data like personal user information
(e.g. name, surname and so on), security data (like
user-name and password for server connection) and so
on. The data interpreted by the IMU module are then
stored by the server into a proper MySql database, for
future use by KAFKA. For example, a KA-Developer
can exploit them to build up knowledge artifacts for
recommendation systems development, as shown in
Melen et al. (2015).
Integrating Knowledge Artifacts and Inertial Measurement Unit Sensors for Decision Support
311

Figure 6: A KA-User Server Side Data-Example: Heart Beat Rate detection.
Figure 7: The final KA-User architecture.
8 CONCLUSIONS AND FUTURE
WORKS
This paper has presented an improvement of the KA-
User role in the KAFKA framework, aiming at wear-
able device exploitation to detect and analyse new ob-
servations on the field. These observations can be
profitably used in many domains: in particular, we
are collaborating with psychologists of the Univer-
sity of Milano-Bicocca in the design and development
of mobile apps for the promotion of physical activity
in people potentially affected by cardiovascular dis-
eases (Baretta et al., 2016), taking care of both quan-
titative (like HBR) and qualitative (like self-efficacy)
variables.
Physical activity (PA) is considered one of the
most important factors for the prevention and man-
agement of non-communicable diseases (NCDs).
Mobile technologies offer several opportunities for
supporting PA, especially if combined with psycho-
logical aspects, model-based reasoning systems and
personalized human computer interaction. Given
that people carry smartphones and can access data
anywhere and anytime, physical activity behaviour
change promotion apps offer the opportunity to pro-
vide tailored feedback and advice at the appropriate
time and place. Therefore, apps offer new opportuni-
ties to deliver individually tailored interventions, in-
cluding real-time assessment and feedback that are
KITA 2016 - 2nd International Workshop on the design, development and use of Knowledge IT Artifacts in professional communities and
aggregations. Knowledge Artifacts as resources in the maker and DIY communities
312

more likely to be effective.
The integration of IMUs and KAFKA in this con-
text will allow expanding the range of recommenda-
tions suggested to the user, analyzing from both the
quantitative (e.g. detecting and elaborating his/her
HBR) and qualitative (e.g. understanding how the
physical activity is conducted) points of view his/her
physical and psychological status, with the final aim
to build up a complete and innovative framework for
personalized training.
REFERENCES
Avci, A., Bosch, S., Marin-Perianu, M., Marin-Perianu, R.,
and Havinga, P. (2010). Activity recognition using
inertial sensing for healthcare, wellbeing and sports
applications: A survey. In Architecture of computing
systems (ARCS), 2010 23rd international conference
on, pages 1–10. VDE.
Bao, L. (2003). Physical activity recognition from accel-
eration data under semi-naturalistic conditions. PhD
thesis, Massachusetts Institute of Technology.
Baretta, D., Sartori, F., Greco, A., Melen, R., Stella, F.,
Bollini, L., D’addario, M., and Steca, P. (2016). Wear-
able devices and ai techniques integration to promote
physical activity. In Proceedings of the 18th In-
ternational Conference on Human-Computer Interac-
tion with Mobile Devices and Services Adjunct, pages
1105–1108. ACM.
Bisiani, R., Merico, D., Pinardi, S., Dominoni, M., Cesta,
A., Orlandini, A., Rasconi, R., Suriano, M., Umbrico,
A., Sabuncu, O., et al. (2013). Fosteringsocial interac-
tion of home-bound elderly people: the easyreach sys-
tem. In International Conference on Industrial, Engi-
neering and Other Applications of Applied Intelligent
Systems, pages 33–42. Springer.
Cabitza, F. and Locoro, A. (2014). Made with knowledge:
disentangling the it knowledge artifact by a qualita-
tive literature review. In Proceedings of the 6th Inter-
national Conference on Knowledge Management and
Information Sharing, Rome, pages 64–75.
Cabitza, F., Simone, C., and De Michelis, G. (2015). User-
driven prioritization of features for a prospective in-
terpersonal health record: Perceptions from the italian
context. Computers in biology and medicine, 59:202–
210.
Holsapple, C. W. and Joshi, K. D. (2001). Organiza-
tional knowledge resources. Decision support sys-
tems, 31(1):39–54.
Melen, R., Sartori, F., and Grazioli, L. (2015). Model-
ing and understanding time-evolving scenarios. In
WMSCI 2015 - 19th World Multi-Conference on Sys-
temics, Cybernetics and Informatics, Proceedings,
volume 1, pages 267–272.
Mileo, A., Merico, D., Pinardi, S., and Bisiani, R. (2009).
A logical approach to home healthcare with intelligent
sensor-network support. The Computer Journal.
Mileo, A., Pinardi, S., and Bisiani, R. (2010). Movement
recognition using context: a lexical approach based
on coherence. MRC 2010, page 37.
Pinardi, S. and Bisiani, R. (2010). Movement recogni-
tion with intelligent multisensor analysis, a lexical
approach. In Intelligent Environments (Workshops),
pages 170–177.
Salazar-Torres, G., Colombo, E., Da Silva, F. C., Noriega,
C., and Bandini, S. (2008). Design issues for knowl-
edge artifacts. Knowledge-based systems, 21(8):856–
867.
Sartori, F. and Melen, R. (2015). Time evolving expert sys-
tems design and implementation: The KAFKA ap-
proach. In KEOD 2015 - Proceedings of the Inter-
national Conference on Knowledge Engineering and
Ontology Development, part of the 7th International
Joint Conference on Knowledge Discovery, Knowl-
edge Engineering and Knowledge Management (IC3K
2015), Volume 2, Lisbon, Portugal, November 12-14,
2015, pages 84–95.
Integrating Knowledge Artifacts and Inertial Measurement Unit Sensors for Decision Support
313
