
Estimating Spatial Averages of Environmental Parameters based on
Mobile Crowdsensing
Ioannis Koukoutsidis
Hellenic Telecommunications & Post Commission, 60 Kifissias Avenue, 151 25 Maroussi, Greece
Keywords:
Mobile Crowdsensing, Spatial Average, Stratified Sampling.
Abstract:
Mobile crowdsensing can facilitate environmental surveys by leveraging sensor-equipped mobile devices that
carry out measurements covering a wide area in a short time, without bearing the costs of traditional field
work. In this paper, we examine statistical methods to perform an accurate estimate of the mean value of an
environmental parameter in a region, based on such measurements. The main focus is on estimates produced
by considering the mobile device readings at a random instant in time. We compare stratified sampling with
different stratification weights to sampling without stratification, as well as an appropriately modified version
of systematic sampling. Our main result is that stratification with weights proportional to stratum areas can
produce significantly smaller bias, and gets arbitrarily close to the true area average as the number of mobiles
increases, for a moderate number of strata. The performance of the methods is evaluated for an application
scenario where we estimate the mean area temperature in a linear region that exhibits the so-called Urban
Heat Island effect, with mobile users moving in the region according to the Random Waypoint Model.
1 INTRODUCTION
Sensor-equipped mobile devices (e.g. smartphones or
connected car devices) bring new possibilities for en-
vironmental surveys, as they enable data collection
remotely through crowdsensing, without conducting
traditional field work. Compared to the deployment of
static sensor nodes, mobile crowdsensing is an attrac-
tive low-cost alternative for sensing of the environ-
ment; it takes advantage of the ubuiquitous presence
of mobile users in practically all areas and can exploit
the more advanced memory, processing and com-
munication capabilities of mobile devices for con-
ducting and transmitting complex measurements. In
recent examples, specially-equipped mobile devices
have been used to measure temperature, relative hu-
midity, air-quality and other environmental parame-
ters in large cities (van der Hoeven et al., 2014; An-
tonic et al., 2014).
Aggregating all measurements and producing an
average value that correctly estimates the mean pa-
rameter value in an area
1
is a complex task. The re-
searcher must decide for the number of mobile de-
vices collecting measurements, the number of mea-
surements, the method and the time at which they are
1
Throughput the paper, we use the term area more broadly
to refer to a region, and not strictly its size.
taken, as well as the estimator formula. The com-
plexity arises from the movement of the mobiles, and
is increased by spatial autocorrelation (observations
in nearby locations are more likely to be similar than
observations further apart) and heterogeneity (obser-
vations vary systematically from place to place) of the
measurement values.
If we assume that there are measurements of the
mobile users that densely cover the whole area (so
that, if we partition the area into a large number of
subareas, the probability that a subarea is not mea-
sured approaches zero), then a good method to ap-
proach the true mean value is to split the area into
a very large number of subareas, take the average of
measurements in each subarea, and then average over
the subareas. This will be later shown in Sect. 3. In
cases where no dense set of measurements is available
and a quick estimate is in order, it would be desirable
to get the current readings of the mobile sensing de-
vices, so as to have a “snapshot”-sensing of the mea-
surement area, with a single measurement from each
mobile. The caveat is that many mobility models ef-
fect a higher concentration of mobile devices near the
center of the area, therefore taking a random sample
of the devices will produce a biased estimate. Statis-
tical methods to perform an accurate estimate in this
setting are the main topic of this paper.
Koukoutsidis I.
Estimating Spatial Averages of Environmental Parameters based on Mobile Crowdsensing.
DOI: 10.5220/0006110900150026
In Proceedings of the 6th International Conference on Sensor Networks (SENSORNETS 2017), pages 15-26
ISBN: 421065/17
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reser ved
15

Related lines of work concern the estimation of
aggregate quantities in peer-to-peer (P2P) ((Mas-
souli
´
e et al., 2006; Kempe et al., 2003; Datta and
Kargupta, 2007; Stutzbach et al., 2009; Kurant et al.,
2011)) and sensor networks ((Considine et al., 2004;
Ganesan et al., 2004; Bash et al., 2004; Shrivastava
et al., 2004)). The research in P2P networks does not
explicitly address the estimation of spatial statistics,
although the techniques themselves could be used for
such purpose (i.e. population values could be values
in some locations recorded by the nodes). Some of
the existing research in sensor networks is closer to
our context and tries to deal with the bias that can
be introduced in the computation of aggregates due
to non-uniform device locations. However, all these
techniques are conceived for fixed networks and can-
not be directly imported in a mobile scenario, as node
mobility is an important factor that complicates the
situation. For example, uniform random sampling
is harder to achieve when we introduce node mobil-
ity and opportunistic encounters between nodes. Fur-
thermore, the location at which the measurements are
taken must be taken into consideration when estimat-
ing spatial averages of environmental values.
We attempt to tackle the problem by using spa-
tial sampling techniques. We examine the case where
mobile devices move in an area according to a mobil-
ity model with a stationary location distribution, and
take measurements of an environmental parameter at
a random instant in time. The goal is to estimate the
average of the environmental parameter in the area as
accurately as possible. Measurements from all de-
vices are assumed to be sent to a central processor
which carries out the estimation. We compare strati-
fied sampling with different stratification weights to
sampling without stratification. Our main result is
that a method for estimating the average based on
stratifying the measurement area with weights propor-
tional to stratum areas significantly outperforms other
methods in terms of bias, and can get arbitrarily close
to the true average as the number of mobiles and the
number of strata increases. We also show that sys-
tematic sampling, which is known to usually be more
accurate than other spatial sampling techniques (Que-
nouille, 1949), would rather not perform well in this
setting.
We evaluate the methods in an application sce-
nario where mobile nodes move in a linear region ac-
cording to a Random Waypoint Model (RWP) – for
which analytical expressions for the stationary loca-
tion distribution have been derived in (Bettstetter and
Wagner, 2002; Hyyti
¨
a et al., 2006) – and take tem-
perature measurements. A phenomenon that occurs
in large urban areas is the so-called Urban Heat Is-
land (UHI) effect, in which temperatures rise con-
siderably as we move towards the center of the city
within relatively small distances (Unger et al., 2001).
Such a phenomenon cannot be captured satisfactorily
by sparsely located metereological stations, so it is
presumed that the use of crowdsensing can produce
area temperature estimates with much more accuracy
(Muller et al., 2015). In Sect. 5 we construct a sim-
ple model of the UHI effect and evaluate the exam-
ined sampling techniques when estimating the aver-
age temperature in the area.
In remaining parts of the paper, Section 2 provides
some basic results on spatial sampling. In Section 4,
we focus on estimates at a random instant in time and
demonstrate the properties of the stratification method
with weights proportional to stratum areas. Section 6
presents numerical results for the bias reduction that
can be achieved with the stratification method for a
wide range of test cases and configuration parameters.
The paper ends in Section 7 with a summary of the
most important conclusions and a discussion of open
research issues.
2 SPATIAL SAMPLING BASICS
For a continuous
2
parameter T (x) the mean value
within an area A of size a is
˜
T (A) =
Z
A
T (x)d(x)/a . (1)
If we are at liberty to sample anywhere within the
area, then both uniform random sampling and strati-
fied random sampling will produce an unbiased esti-
mate of the mean area value. Indeed, suppose there
are n sample points {x
1
,...,x
n
}. In uniform random
sampling, each point is selected uniformly indepen-
dently within A. The expected value of the sample
average
¯
T =
1
n
∑
n
i=1
T (x
i
) is
E[
¯
T ] =
1
n
n
∑
i=1
1
a
Z
A
T (x)dx =
1
a
Z
A
T (x)dx =
˜
T (A) .
In stratified random sampling, the area A is par-
titioned into L strata or subareas A
0
1
,...,A
0
L
, each of
area s. A uniform random sample of size k is taken
from each of the L strata, so that kL = n. Suppose
the measurement values in stratum i are x
i1
,...,x
ik
.
First the average value of measurements within each
stratum is taken,
¯
T
i
=
1
k
∑
k
j=1
x
i j
. The overall sample
average is then calculated as:
¯
T =
1
L
∑
L
i=1
¯
T
i
.
2
The results also apply to the case of a parameter taking
discrete values in the area.
SENSORNETS 2017 - 6th International Conference on Sensor Networks
16

Its expected value is
E[
¯
T ] =
1
L
L
∑
i=1
E[
¯
T
i
] =
1
L
L
∑
i=1
˜
T
i
=
1
sL
L
∑
i=1
Z
A
0
i
T (x)d(x)
=
˜
T (A) .
Systematic sampling, in which the area is again
split into subareas, and the sample values are taken
at locations following a deterministic pattern,
3
with
some initial randomization, does not in general pro-
duce an unbiased estimate. An exception is the case
where T is a realization of a homogeneous stochastic
process with average value µ = E[T (x)] ∀x.
Despite the difficulty in producing unbiased esti-
mates in systematic sampling, Ripley (Ripley, 2004)
showed that systematic sampling outperforms other
sampling schemes when T (x) is random and no prior
knowledge is available, except when there is period-
icity in the measured parameter; similar results where
known from (Cochran, 1946) and (Quenouille, 1949).
3 ESTIMATE BASED ON A
DENSE MEASUREMENTS SET
In mobile crowdsensing we face a complex situation.
The locations of the sample values are determined
from the mobiles, so we are not at liberty of select-
ing any locations we wish. If we indeed had a large
number of measurement values that densely covered
the whole area, we could derive an accurate estimate
based on all available measurements, irrespective of
the number and distribution of these measurements in
the area. We show that in Proposition 1. But before let
us introduce the considered setup and some necessary
notation.
We consider a discrete-valued parameter T , for
which we want to estimate the mean value over an
area A. The parameter is modeled by a step function
T (A
c
), c = 1...C, where A
c
is a subarea of A in which
the parameter value remains constant. The parameter
value in subarea A
c
is also denoted as T
c
for brevity.
The average value in the area is equal to
˜
T =
∑
c
T
c
a(A
c
)/a(A) , (2)
where a(·) is the measure of the size of the area
(length in R, surface in R
2
, volume in R
3
).
The estimation method is as follows: The area A is
split into strata A
0
1
,...,A
0
L
of equal size (generally dif-
ferent from subareas A
1
,...,A
C
) and the estimate over
3
There are many variations of systematic sampling, de-
pending on the area dimensions and the alignment or non-
alignment of sampling locations in each direction. For ex-
amples, the reader is referred to (Ripley, 2004, Section 3.1)
each stratum A
0
i
equals
ˆ
T
A
0
i
= (T
m
1
+ ··· + T
m
n
A
0
i
)/n
A
0
i
,
where n
A
0
i
is the number of collected measurements
in this stratum, with values T
m
i
, i = 1,...,n
A
0
i
. The
sampling average over the whole area equals
ˆ
T =
(
ˆ
T
A
0
i
+ ··· +
ˆ
T
A
0
L
)/L.
Proposition 1. Provided that each stratum is non-
empty (i.e. has at least one measurement) w.h.p.(with
high probability), then as the number of strata tends
to infinity, the estimate
ˆ
T tends to the true average
˜
T
w.h.p.
Proof. As L increases, there will be a point where
each subarea A
c
will be greater than each stra-
tum A
0
i
, i = 1, . . . , L, so that a(A
c
) can be decom-
posed as a(A
c
) = a(A
1
c
)+ ···+ a(A
m
c
c
)− a(ε
c
), where
{A
i
c
}
i=1...m
c
is the subset of {A
0
i
}
i=1...L
that is the min-
imum cover set of A
c
and ε
c
is the excess area that
exceeds area A
c
when we add the areas in the cover
set (a(ε) < a(A
i
c
)).
As L → ∞, a(ε
c
) → 0 so that {A
i
c
}
i=1...m
c
tends to
cover exactly the area A
c
. But, since each stratum is
non-empty w.h.p., the estimates in {A
i
c
} are constant
and equal to T
c
, except for a number of border subar-
eas which cross-over area A
c
. Denote the number of
border subareas by b
c
, and the sum of the estimates in
those subareas by
ˆ
T
b
c
.
The sampling average over the whole area can
then be rewritten as
ˆ
T = (
∑
c
T
c
(m
c
− b
c
) +
∑
c
ˆ
T
b
c
)/L .
As L → ∞, the excess areas tend to zero, m
c
/L →
a(A
c
)/a(A) (since the subareas A
0
1
,...,A
0
L
are of equal
size) while b
c
/L → 0,
∑
c
ˆ
T
b
c
/L → 0. Hence
ˆ
T →
˜
T
w.h.p.
Intuitively, the condition that, as L → ∞, each sub-
area is non-empty w.h.p. holds when the number of
measurements is greater or increases faster than the
number of subareas and the distribution of measure-
ment locations is close-to-uniform.
4
For example, if
n measurements are uniformly distributed in the area,
this becomes a balls and bins problem with n balls
into L bins. If, as L → ∞, n → ∞ with λ = n/L, a
well-known result in combinatorics is that the distri-
bution of balls into bins approaches a Poisson distri-
bution with rate λ (e.g. see (Mitzenmacher and Upfal,
2005, Section 5.3.1.)). Therefore, the probability that
4
If mobile measurements are uniformly distributed over the
area, one need only take the sample average for a finite
number of measurements without any stratification to pro-
duce an unbiased estimate of the area average. However,
stratification may still be useful in reducing the sample
variance.
Estimating Spatial Averages of Environmental Parameters based on Mobile Crowdsensing
17

each subarea is non-empty is, in the limit, 1−e
−λ
and
for n > L each subarea is non-empty w.h.p.
However, if the distribution of measurement loca-
tions is not uniform (for instance, as a result of a non-
uniform movement distribution of the mobile users),
it may well happen that some subareas are left empty.
In a practical algorithm, given a number of available
measurements in an area, one could increase the num-
ber of strata L successively to produce a more accurate
estimate, and the increase could stop when an empty
area is found.
4 ESTIMATE AT A RANDOM
INSTANT
We now consider that there are n mobile users roam-
ing in the area following the same mobility model.
Suppose that each mobile user’s location X in area A,
if sampled at a random instant in time, is described by
a distribution with pdf f
X
(x).
5
The probability that a single mobile user is in a
subarea A
c
⊂ A is then P(A
c
) =
R
A
c
f
X
(x)dx. Assum-
ing that the movements of the mobile users are inde-
pendent, we can derive the expected number of mo-
bile users in the area as nP(A
c
).
Note that we do not demand that the random sam-
pling instants are the same for each mobile, as this
could face synchronization difficulties (especially in
the absence of a GPS service). For independent move-
ment processes of the mobiles the analysis still holds,
as long as each mobile’s process is sampled indepen-
dently (in the sense explained in footnote 5). Further,
although we assume a single measurement from each
mobile, the analysis that follows also holds when we
can afford to take more than measurements from each
mobile at random instants in time, since this would be
equivalent to increasing the number of mobiles in the
area.
5
This distribution could be the limiting distribution of a sta-
tionary ergodic stochastic process describing user move-
ments, whereas the sampling process could be an indepen-
dent Poisson process; then the time average distribution
(of the stochastic process describing user movements) is
the same as the distribution obtained when averaging over
the sampling times. This also holds under weaker assump-
tions on the observed process, as well as more generic sam-
pling processes (such as when the observed process only
has a constant finite time average and the sampling pro-
cess is an independent renewal process with a non-lattice
cycle length distribution, where the cycle length ` satisfies
E`
1+ε
< ∞, for some ε > 0). For more details readers are
referred to (Glynn and Sigman, 1998).
4.1 Estimate without Stratification
We first examine the case where we estimate the mean
parameter value in A by sampling all mobiles in the
area without any stratification. The measurement of
each mobile i, T
m
i
, is supposed to be the one at the
point where the mobile is found when it is sampled.
Given that the movements of mobile users are inde-
pendent and that sampling is performed at a random
instant in time, the parameter readings of the mobile
users become i.i.d. random variables.
The expected value E[T
m
]
:
= E[T
m
i
] of the param-
eter reading of each mobile i (i = 1, . . . , n) is
E[T
m
] =
∑
c
T
c
P(A
c
) . (3)
To derive an estimate of the mean area value, de-
noted by
ˆ
T
w
, we simply take the average of these
measurements. Since we have a set of i.i.d. ran-
dom variables, the expectation of their average equals
the expected value of each of these variables. Hence
E[
ˆ
T
w
] = E[T
m
].
As anticipated, this expectation is independent of
the number of mobiles n. Therefore, the estimate does
not change if we randomly select a subset of the mo-
bile users rather than the whole population.
Clearly this estimate is biased. The bias E[
ˆ
T
w
]−
˜
T
reflects the extent to which the location distribution of
each mobile deviates from the uniform distribution.
Denoting the variance of the measurement value
of each mobile by Var(T
m
), the variance of the aver-
age is
Var(
ˆ
T
w
) =
Var(T
m
)
n
=
1
n
E[T
2
m
] − E
2
[T
m
]
, (4)
that is, it is 1/n times the variance of the parameter
reading of a single mobile in the area. (This is also
straightforward since we take the variance of an av-
erage of i.i.d random variables.) It is also readily de-
rived that if we randomly select a subset of the mobile
population of size k < n, the variance of the sample
average will be Var(T
m
)/k.
4.2 Estimate with Stratification
Consider now partitioning the area into subareas or
strata A
0
1
,...,A
0
L
, taking the average of measurements
in each stratum and combining these into a single es-
timate. Stratification can be done as part of the pro-
cessing of the values recorded by the mobiles; it is not
necessary to sample all mobiles in a certain stratum
separately. Provided that each mobile also records the
location at which the measurement is taken, the pro-
cessing unit can subsequently discern which measure-
ments are taken at each stratum.
SENSORNETS 2017 - 6th International Conference on Sensor Networks
18

We will consider two different types of weights
of the stratum averages: a) based on the number of
mobiles found in each stratum, and b) based on the
area of each stratum:
(a)
ˆ
T
n
st
=
L
∑
h=1
n
h
ˆ
T
w,h
n
(5a)
(b)
ˆ
T
s
st
=
L
∑
h=1
a(A
0
h
)
A
0
h
ˆ
T
w,h
∑
L
j=1
a(A
0
j
)
A
0
j
, (5b)
where n
h
is the number of users from stratum h,
h = 1 . . . L, and
ˆ
T
w,h
= (T
m
1
+ · · · + T
m
n
h
)/(n
h
) is the
temperature estimate based on the users in this stra-
tum.
A
0
h
is the indicator function which equals 1 if
A
0
h
is non-empty, and zero otherwise.
In the special case where the strata are of equal
size, the estimate (b) becomes
ˆ
T
s
st
=
L
∑
h=1
A
0
h
ˆ
T
w,h
∑
L
j=1
A
0
j
. (6)
Only non-empty subareas are considered in the
estimate, that is if no mobile is found in a subarea,
then this subarea is omitted. This is reflected with the
indicator function in (5b). (No indicator function is
needed in (5a), since n
h
will be zero if A
0
h
is empty.)
If the strata are always non-empty (i.e. n
h
6= 0
∀ h), then as the number of strata increases, the es-
timate will approach the true average from Proposi-
tion 1. However, as the number of strata increases,
so does the probability of a stratum being empty, in
which case the error is expected to increase. We will
investigate this trade-off.
4.2.1 Weighting Proportionally to the Number
of Mobiles in Each Stratum
Interestingly, the expected value of the estimate in
(5a) is the same as in the non-stratification case. To
show this, we begin by noting that the parameter read-
ings of mobile users in each stratum are i.i.d. random
variables. Therefore, by applying Wald’s equation,
E[
ˆ
T
n
st
] =
1
n
L
∑
h=1
E[n
h
]E[T
m|h
] , (7)
where E[T
m|h
] is the expected parameter reading of a
mobile user in stratum h.
6
The expected number of users in stratum h is
E[n
h
] = n
R
A
h
f
X
(x)dx. Denoting by A
h,c
the subarea
formed by the intersection of A
0
h
, A
c
, we have that
E[T
m|h
] =
∑
c
T
c
Z
A
h,c
f
X|h
(x)dx , (8)
6
Note that Wald’s equation, and therefore (7) also holds
when n
h
= 0 in some stratum h.
where f
X|h
(x) is the conditional distribution of the
mobile user position confined in A
0
h
:
f
X|h
(x) =
f
X
(x)
R
A
0
h
f
X
(x)dx
. (9)
Hence from (7),(8),(9) the mean value of the estimate
is
E[
ˆ
T
n
st
] =
1
n
L
∑
h=1
n
Z
A
0
h
f
X
(x)dx
∑
c
T
c
Z
A
h,c
f
X|h
(x)dx
!
=
L
∑
h=1
Z
A
0
h
f
X
(x)dx
∑
c
T
c
Z
A
h,c
f
X|h
(x)dx
=
L
∑
h=1
∑
c
T
c
Z
A
h,c
f
X
(x)dx
=
∑
c
T
c
Z
A
c
f
X
(x)dx = E[T
m
] . (10)
Therefore, however we may stratify the area, the ex-
pected value of the estimate is the same as in the non-
stratification case.
4.2.2 Weighting Proportionally to Stratum
Areas
We will proceed to derive the expected value of the
average in the case of stratification with weights pro-
portional to the area of each stratum. From (5b) we
have:
E[
ˆ
T
s
st
] =
L
∑
h=1
E
"
a(A
0
h
)
A
0
h
ˆ
T
w,h
∑
L
j=1
a(A
0
j
)
A
0
j
#
(11)
In order to proceed with the analysis, we assume
that the total non-empty area under a certain partition
(which is in the denominator of the fraction in (11)) is
approximately independent of a(A
0
h
)
A
0
h
ˆ
T
w,h
in any of
the strata.
7
Furthermore, using the first-degree Taylor
series approximation
8
E
"
1
∑
L
j=1
a(A
0
j
)
A
0
j
#
≈
1
E[
∑
L
j=1
a(A
0
j
)
A
0
j
]
(12)
we have that
E[
ˆ
T
s
st
] ≈
L
∑
h=1
a(A
0
h
)P
ne
(A
0
h
)
∑
L
j=1
a(A
0
j
)P
ne
(A
0
j
)
E[
ˆ
T
w,h
] , (13)
7
In reality, a very weak dependence is expected between
these two terms.
8
For a random variable x, a more accurate approximation
is E[1/x] ≈ 1/E[x] + 1/E[x]
3
Var(x). In our case, x is the
total non-empty area; further, as the number of mobiles
increases, the second term of the approximation decreases
and the first-degree approximation is tighter.
Estimating Spatial Averages of Environmental Parameters based on Mobile Crowdsensing
19

where P
ne
(A
0
h
) is the probability of A
0
h
being non-
empty, P
ne
(A
0
h
) = 1 − (1 −
R
A
0
h
f
X
(x)dx)
n
.
If T
m
i|h
is the parameter reading of a mobile user
i (i = 1...n
h
) in stratum h, with common expectation
E[T
m|h
], then
E[
ˆ
T
w,h
] = E
"
T
m
1|h
+ ··· + T
m
n
h
|h
n
h
#
= E[n
h
]E
T
m
i|h
n
h
≈ E[T
m|h
] , (14)
by applying Wald’s equation and subsequently using
the approximation E[1/n
h
] ≈ 1/E[n
h
]. Combining
(13),(14) and (8) gives us an approximate value of the
expectation.
4.3 Estimate with Systematic Sampling
We consider that the area is partitioned into kL con-
tiguous subareas of equal size. Initially, a random
subarea is selected from 1...k and then sampling con-
tinues by selecting every k
th
consecutive subarea until
L subareas have been chosen. Similarly to stratified
sampling, an estimate of the environmental parame-
ter value in a subarea is produced by averaging the
mobile measurements in this subarea. To produce the
overall estimate, the estimate in each selected non-
empty subarea is weighted by the fraction of the sub-
area size relative to the sum of the sizes of all selected
non-empty subareas.
The formal expression of the estimate is thus sim-
ilar to (5b):
ˆ
T
s
sy
=
kL
∑
h=1
a(A
0
h
)
0
A
0
h
ˆ
T
w,h
∑
kL
j=1
a(A
0
j
)
0
A
0
j
, (15)
where
0
A
0
h
now equals one if A
0
h
is included in the
sample and it is non-empty. For each subarea A
0
h
we
now have that E[
0
A
0
h
] = P
ne
(A
0
h
)/k.
Using the same approximations that led us to (13),
we have for the expected value of the estimate:
E[
ˆ
T
s
sy
] ≈
kL
∑
h=1
a(A
0
h
)P
ne
(A
0
h
)/k
∑
kL
j=1
a(A
0
j
)P
ne
(A
0
j
)/k
E[
ˆ
T
w,h
] . (16)
Hence we derive the following conclusion:
Corollary 1. The expectation of the estimate with
systematic sampling and L selected strata is approxi-
mately the same as the expectation of the stratification
estimate with weights proportional to stratum areas,
and a total of kL strata.
4.4 Properties of the Stratification
Estimate with Weights Proportional
to Stratum Areas
At this point, it is worth elaborating on some proper-
ties of the stratification estimate with weights propor-
tional to stratum areas, which help to illuminate the
worthiness of the method and provide insight for the
results that follow. We consider equal-sized strata, i.e.
that the estimate (6) is used.
First, we show in the following proposition that
when n is finite, the two estimates (6) and (5a) coin-
cide as L → ∞.
Proposition 2. Consider equal-sized strata and a
finite mobile population, where each mobile has a
continuous location pdf f
X
. Then as the number of
strata tends to infinity, the stratification estimate with
weights proportional to stratum areas and the stratifi-
cation estimate with weights proportional to the num-
ber of mobiles in each stratum coincide with proba-
bility 1.
Proof. Suppose X
1
,...,X
n
are the random variables
representing the mobiles’ positions in area A. Then
since the location pdf of each mobile is a continuous
function, the probability that any two mobiles are in-
finitesimally close is zero. Hence, as L → ∞, after
some value of L only a single mobile will reside in
each stratum and all variables
A
0
j
in (6) become zero
except for some areas A
00
1
,...,A
00
n
around the mobiles.
Therefore, lim
L→∞
∑
L
j=1
A
0
j
=
∑
n
i=1
A
00
i
= n. For
the same reason, lim
L→∞
∑
L
h=1
n
h
ˆ
T
w,h
=
∑
n
i=1
T
m
i
=
lim
L→∞
∑
L
h=1
A
0
h
ˆ
T
w,h
. Hence the two estimates coin-
cide with probability 1.
Since, as we saw in Section 4.1 the expected value
of the stratification estimate with weights propor-
tional to the number of mobiles in each stratum coin-
cides with the expected value of the non-stratification
estimate, we also have the following:
Corollary 2. Under the setting of Proposition 2,
the expected value of the stratification estimate with
weights proportional to stratum areas coincides with
the expected value of the non-stratification estimate.
Additionally, if the mobile population is so large
that the strata are non-empty w.h.p as L increases,
ˆ
T
s
st
will tend to the true average from Proposition 1. For
finite L this does not hold. But what is challenging is
to show that even for finite L,
ˆ
T
s
st
produces a smaller
bias than the non-stratification estimate.
Intuitively, the explanation for this goes as fol-
lows. The bias is mainly caused by the larger con-
centration of mobiles in one or more areas. (If mo-
SENSORNETS 2017 - 6th International Conference on Sensor Networks
20

r
r r r r r r r r
r r r r r r r r r r
r
h
1
h
2
h
3
h
4
h
5
h
6
T
1
T
2
T
3
Figure 1: A realization of the mobiles’ positions in a region
with three discrete environmental parameter values and a
stratification into 6 strata.
biles were uniformly distributed in the region the es-
timate would be unbiased, as this is equivalent to uni-
form random sampling.) Stratification serves to cre-
ate a virtual sample of measurement locations, which
is closer to a uniform distribution.
An illustration of this is shown in Fig. 1. The re-
gion is divided in three areas, with environmental pa-
rameter values T
1
, T
2
and T
3
. We stratify into 6 equal
subareas (strata), h
1
,...,h
6
. Suppose we have 20 mo-
biles, whose location distribution is concentrated in
the right-most areas. The filled dots represent a real-
ization of the mobiles’ positions at a random instant
of time. The estimate without stratification will pro-
duce an average much closer to T
3
, since half of the
mobiles are located in this subarea. On the other hand,
stratification produces the same effect as if we had a
virtual sample composed of a single location in each
stratum. Hence the stratification estimate will smooth
out the skewness caused by the concentration of mo-
biles, producing a value much closer to the true area
average.
More formally, let us denote the bias of the esti-
mate in a stratum h
i
by B
h
i
. If we assume that strata
are always non-empty, the bias of the stratification es-
timate equals the bias of a randomly chosen stratum:
E[
ˆ
T
s
st
] −
˜
T =
1
L
(B
h
1
+ ··· + B
h
L
) . (17)
By considering the same partition into strata in the
non-stratification case, the bias can be written as
9
E[
ˆ
T
w
]−
˜
T = E[T
m
]−
˜
T = B
h
1
P(h
1
)+ · · · + B
h
L
P(h
L
) .
(18)
The concentration of mobiles in some areas, which
largely causes the bias, is only reflected in (18), and
not in (17). Therefore, in practical cases we can
expect that the stratification estimate with weights
proportional to stratum areas will produce a much
smaller bias than the non-stratification estimate.
5 APPLICATION SCENARIO
We consider a linear area that exhibits the so-called
Urban Heat Island (UHI) effect. Mobile nodes (ei-
9
Since the bias of a single mobile measurement in each stra-
tum is equal to the bias of the average of n mobile measure-
ments in the same stratum.
ther human users or vehicles) are roaming in the area,
equipped with devices able to conduct temperature
measurements. Our goal is to estimate the area mean
in (2) from a sample of the mobile measurements, as
accurately as possible. For simplicity, we assume that
there are no errors in individual measurements.
We employ the RWP model, which is one of the
most widely used models in mobile and ad-hoc net-
works. In the general version of the model, a mobile
user chooses a random destination and moves to it at
a randomly chosen speed. Once at the destination,
the user stops for a pause time, then picks another
destination at random and repeats the same process.
Parameters of the model include the movement area,
the number of mobile users, speed and pause time, as
well as the resolution of the destination points (may
range from a single point to a bounded area).
The main reason for choosing the RWP model in
this paper is the fact that analytic formulas for the
limiting spatial distribution of a mobile node exist.
For a node moving according to the RWP model in
a restricted one-dimensional area [−x
m
,x
m
] with con-
stant speed, uniformly distributed destination points
and equal pause times at those points, the probability
density function of its location X is (Bettstetter and
Wagner, 2002):
f
X
(x) = −
3
4x
3
m
x
2
+
3
4x
m
for − x
m
≤ x ≤ x
m
. (19)
Under this model, a node is more likely to be found in
the center of the area, while the probability that is it
is located at the border tends to zero (solid blue curve
in Fig. 2).
The UHI effect is quantified by the difference be-
tween the temperature at a certain point and the low-
est temperature observed in the area. Usually an area
is split into subareas and normalized UHI values are
taken in each subarea by dividing with the largest UHI
value. Climate studies have shown that normalized
values are largely independent of the seasonal clima-
tological conditions and are determined to a high de-
gree by urban factors (buildings, roads, population
density, traffic, etc.) (Unger et al., 2001).
The general cross-section of the typical UHI effect
described in (Oke, 2002) consists of a cliff, plateau
and peak, corresponding to rural, suburban, and ur-
ban areas. In each one of these areas the temperature
may fluctuate, but on average clear level shifts can be
observed when we move from one area to the other.
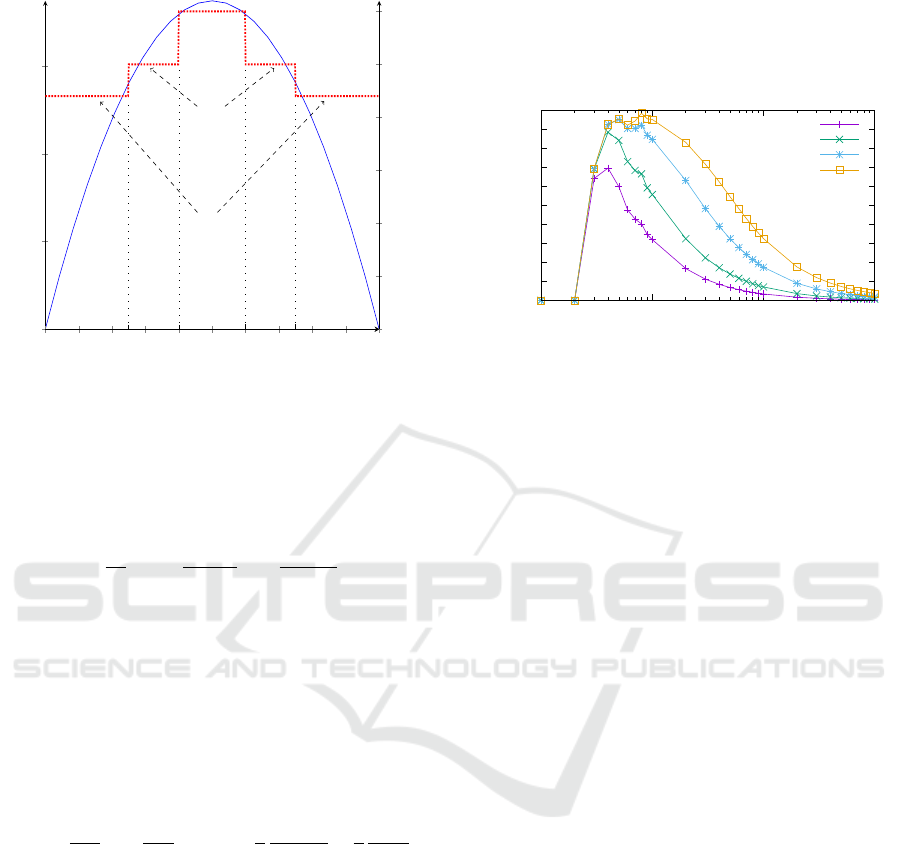
A simplified model of the UHI effect consisting
of a 3-step function – without normalizing tempera-
ture values – is depicted in Fig. 2 (red densely dotted
line). Each step corresponds to a subarea (rural, sub-
urban and urban). The corresponding temperatures
are T
r
< T
sub
< T
u
and x
u
, x
r
mark the limits of the
Estimating Spatial Averages of Environmental Parameters based on Mobile Crowdsensing
21
−10 −8
−6
−4 −2 0 2 4
6
8 10
0
2
4
6
·10
−2
x
f
X
(x)
−10 −8
−6
−4 −2 0 2 4
6
8 10
0
5
10
15
20
25
30
Suburban
Rural
Urban
T
u
T
sub
T
r
−x
r
−x
u
x
u
x
r
Air temperature
Figure 2: Plot of the pdf of the one-dimensional RWP
model (x
m
=10), together with a simple model of an UHI
(red densely dotted line).
urban and rural areas respectively. The mean value
of the temperature in the area, which we are trying to
estimate, is
˜
T = T
u
x
u
x
m
+ T
sub
x
r
− x
u
x
m
+ T
r
x
m
− x
r
x
m
. (20)
6 NUMERICAL RESULTS
Supposing each mobile user follows a one-
dimensional RWP mobility model with pdf given in
(19), the probability of a mobile to be in a subarea
[a,b] corresponding to a step of the environmental
parameter function is
Z
b
a
−
3
4x
3
m
x
2
+
3
4x
m
dx = −
1
4
b
3
− a
3
x
3
m
+
3
4
b − a
x
m
.
(21)
We first present some basic performance evalua-
tion results based on the model in Fig. 2. We examine
the bias reduction of the stratification method, when
weighting proportionally to stratum areas, compared
to the bias of the estimate without stratification. Equal
sized-strata are considered. The bias reduction is zero
for L = 1, L = 2: The first case is evident since it
amounts to no-stratification. The second is because
in the setting of Fig. 2, for L = 2 we divide into two
symmetric subareas, each of which produces the same
estimate.
As shown in Fig. 3, the stratification estimate with
weights proportional to stratum areas is much better
than the non-stratification estimate, and approaches
its value as the number of strata increases. We can
also get arbitrarily close to the true value of the aver-
age (which yields a bias reduction of almost 100%),
as the number of mobiles increases. All these results
were anticipated from the analysis in Section 4.4.
0
10
20
30
40
50
60
70
80
90
100
1 10 100 1000
Bias reduction (%)
Number of strata
n=10
n=20
n=50
n=100
Figure 3: Bias reduction of the stratification method when
weighting proportionally to stratum areas. The 3-step func-
tion shown in Fig. 2 is used for the environmental parame-
ter.
Notice also that a maximum reduction exists for
some intermediate value of L, which reflects the trade-
off discussed in Section 4.2 between attempting to
improve the accuracy of the estimate by introduc-
ing more strata and the possibility of finding these
strata empty. In the results of Fig. 3 the maximum is
achieved for only a few strata, and the optimal value
of L increases with the number of mobiles. (The op-
timal value is L = 4 for n = 10,20,50, and L = 8 for
n = 100.) Empty strata modify the weights in the es-
timate so that the subareas that contain the most mo-
biles have non-zero weights with higher probability,
thus skewing the estimate.
We also conclude that the version of systematic
sampling studied in Section 4.3 would only show
smaller bias than the stratification estimate for very
small values of the parameters L and k, where the
product kL would be kept relatively small. Hence sys-
tematic sampling would be less efficient than strati-
fied sampling, unless the savings (in messaging and
processing cost) by sampling only the selected areas
can outweigh the performance deterioration.
Performance is always improved when increasing
the number of mobiles. However, even a small num-
ber of mobiles suffices to get a significant bias re-
duction. Additionally, as the number of mobiles in-
creases, there may also be local maxima in the bias
reduction (notice the cases n = 50, n = 100). Nev-
ertheless, these local maxima are close to each other
and their respective values do not differ very much.
Next we proceed to a more systematic assessment
of the performance of the stratification method, com-
pared to the estimate without stratification. This as-
sessment serves to provide guidance into how the
SENSORNETS 2017 - 6th International Conference on Sensor Networks
22
number of strata L should be selected for different
change patterns of the environmental parameter. We
will vary both the number of steps, as well as the rel-
ative lengths of the steps in the environmental param-
eter function. A larger number of steps represents the
more realistic case where the environmental param-
eter changes less abruptly in the area. The relative
lengths will be defined by the ratio of a geometric
series, which can provide us with different patterns,
from a steep decrease of the inner subarea lengths to
a more uniform distribution.
We consider C steps of the environmental param-
eter step function (in total). The subareas correspond-
ing to steps which are symmetric with respect to the
center of the area are equal (hence C is always an odd
number). Larger subareas appear toward the edges,
similarly to the function in Fig. 2. To this effect, sub-
area lengths are defined by a geometric series with
ratio r. This results into the length of the two edge
subareas being equal to x
m
(1 − r)/(1 − r
(C+1)/2
); the
subsequent inner subarea lengths are defined by mul-
tiplying successively by r. As r increases, the lengths
of the different subareas become more uniform. The
values of the environmental parameter are also sym-
metric with respect to the center and gradually in-
crease from T
min
in the edge subareas to T
max
in
the center subarea, with a fixed increment equal to
2(T
max
− T
min
)/(C − 1).
An important property that follows from this setup
is that the probability of a mobile to be in a subarea
[a,b] (corresponding to a step of the environmental
parameter function) is dependent only on the param-
eters C, r, and independent of the actual value of x
m
.
This follows directly from (21) since in the consid-
ered setup all subarea lenghts are defined as multiples
of x
m
; hence all points a, b inside [−x
m
,x
m
] that de-
limit the subareas are also multiples of x
m
and the lo-
cation probability (21) remains the same. Similarly,
since the strata are derived by splitting the entire area
into equal parts, the length of the strata, as well as the
points inside [−x
m
,x
m
] that delimit the strata are pro-
portional to x
m
. Therefore, all probabilities in (13) are
also independent of x
m
.
Results for the bias reduction under the stratifica-
tion method with varying C and r are shown in Fig. 4.
It can be observed that a larger bias reduction occurs
for decreasing r. On the other hand, the bias reduc-
tion is approximately constant as the number of steps
increases, except when there is a very small num-
ber of steps. Indeed, for all but very small values of
C, the bias when using stratification is approximately
a constant fraction of the bias without stratification.
The fluctuations for small C depend on the match be-
tween the set of subareas corresponding to the steps
40
50
60
70
80
90
100
0 10 20 30 40 50 60 70 80 90 100 110
Bias reduction (%)
Number of steps
L=3
L=4
L=5
L=6
L=10
(a) r=0.5
40
50
60
70
80
90
100
0 10 20 30 40 50 60 70 80 90 100 110
Bias reduction (%)
Number of steps
L=3
L=4
L=5
L=6
L=10
(b) r=0.9
Figure 4: Bias reduction of the stratification method for
different numbers of steps of the environmental parameter
function and different number of strata (n = 20, T
min
=22,
T
max
=30).
of the environmental parameter function and the set of
strata. For example, in subfigure 4a, for C = 3, L = 3,
the two sets almost coincided, and the bias reduction
approaches 100%. On the other hand, in subfigure 4b,
for C = 3, L = 3, the points where the environmental
parameter changes were {-10, -4.74, 4.74, 10}, while
the end points of the strata were {-10, -3.33, 3.33, 10}
and there is a much lower reduction. As C increases
and the size of steps becomes smaller than the size of
the strata, this effect is mitigated.
The optimal number of strata is for all examined
cases small and does not depend significantly on the
value of r (in Fig. 4, the optimal number is L = 4 for
r = 0.5 and L = 5 for r = 0.9); amongst the shown
values of L, the highest value yields the lowest bias
reduction. One might have anticipated that, as C in-
creases, a larger L would bring more benefits. This
however is not true and it seems that the possibility
of a stratum being empty weighs more in the perfor-
mance of the algorithm, not allowing to achieve more
gains. Overall, we observe that the number of steps
is not a significant factor in the performance of the
stratification method.
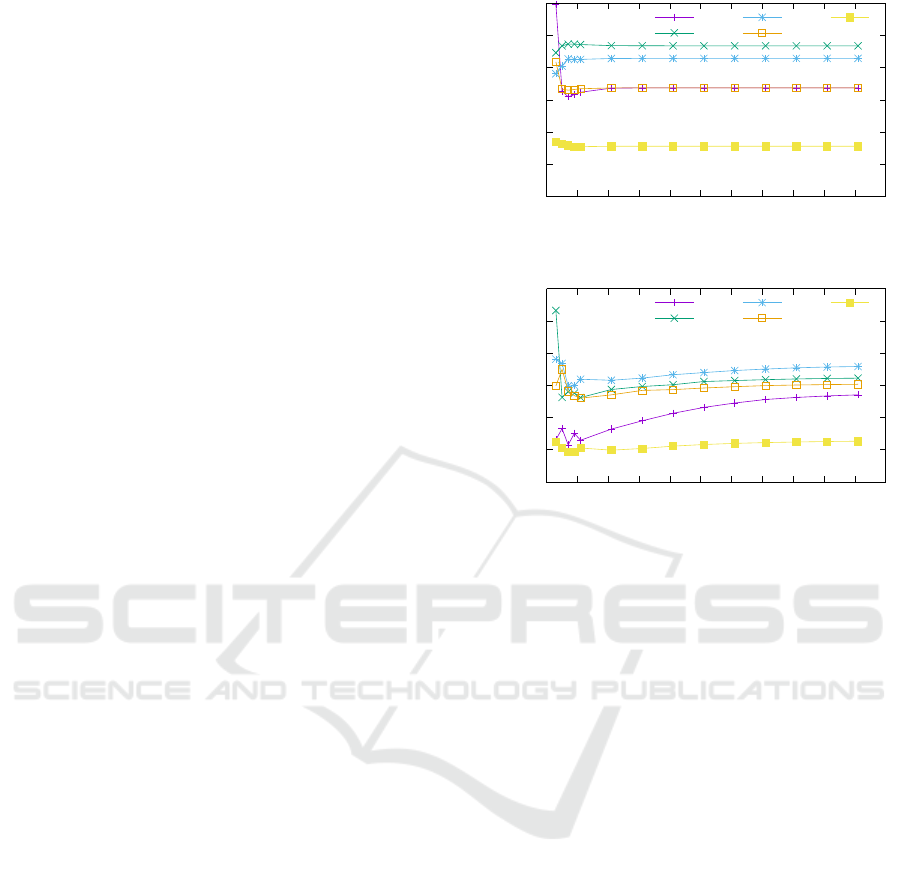
Results for larger temperature intervals are shown
in Fig. 5. Notice that, since both the average esti-
Estimating Spatial Averages of Environmental Parameters based on Mobile Crowdsensing
23

0
1
2
3
4
5
6
7
8
5 10 15 20 25 30 35 40 45 50
Bias (absolute value)
T
max
-T
min
no stratification
stratification, L=3
stratification, L=4
stratification, L=5
stratification, L=6
(a)
40
50
60
70
80
90
100
5 10 15 20 25 30 35 40 45 50
Bias reduction (%)
T
max
-T
min
L=3 L=4 L=5 L=6
(b)
Figure 5: Absolute values of the bias (a) and bias reduction (b) of the stratification method for different temperature intervals
(n = 20, C=5, r=0.7).
mates and the actual mean value of the environmen-
tal parameter are obtained as normalized weighted
sums, the bias values depend only on the difference
T
max
−T
min
and the bias increases linearly with greater
temperature ranges. (See Fig. 5a. The bias increase
results from the larger concentration of mobiles to-
wards the center, whose higher temperature readings
increase the estimate value.) As a result, the rela-
tive bias reduction remains constant as the parameter
range increases (Fig. 5b).
7 CONCLUSIONS AND OPEN
RESEARCH ISSUES
The theoretical and numerical results in this paper
manifest that the stratification method for estimat-
ing the area average of an environmental parame-
ter achieves significant bias reduction over a naive
estimate without stratification, even by sampling a
small number of mobiles and having a small number
of strata. Moreover, the method can get arbitrarily
close to the true average as the number of mobiles
increases, for a moderate number of strata. The op-
timal strata number increases as the number of mo-
biles increases, but still remains relatively small in all
our test cases. (This is convenient, as increasing the
number of strata would increase the processing cost,
and thus the overall cost of the method.) In addition
to the above, the number of strata could be chosen
independently of the difference in range in the envi-
ronmental parameter values within the region of in-
terest and of the change pattern of this parameter. Al-
though the setting for the evaluation was tailored to
the pattern of temperature change in an area that ex-
hibits the Urban Heat Island effect, these conclusions
should have wider applicability, since they reflect fun-
damental properties of the estimate.
Despite these encouraging results, there are still
open issues that require further research, both to ad-
vance the theory and to proceed to a real implementa-
tion of the method. A first issue is the calculation of
the variance of the stratification estimates. The calcu-
lation of the variance is important, especially since we
would like to estimate the average with a single mea-
surement from each mobile. Another challenge would
be to evaluate the performance of the methods in two-
dimensional space. An exact expression for the pdf
of the mobile locations generated by the RWP model
was given in (Hyyti
¨
a et al., 2006) for a general convex
area, and simpler approximate expressions for square
and circular areas were given in (Bettstetter and Wag-
ner, 2002). The theoretical analysis extends to two
dimensions in a straightforward manner, although the
computation becomes much more difficult. Extending
the results to the case of continuous varying param-
eters in space would also be interesting when there
are relevant models available. Otherwise, the discrete
analysis suffices since the true parameter value would
only be known by measurements on a set of discrete
subareas. Finally, a fundamental problem is to ex-
amine the accuracy of an estimate obtained by peri-
odically sampling the mobiles within a certain time
period. This is of great interest, since this kind of
sampling is more likely applicable in practice. The
issue that arises is whether an estimate based on mea-
surements that were collected periodically would be
better than an estimate at a random snapshot.
Additionally, we mention a few open issues re-
garding a potential implementation of the method. We
intentionally left out the details about the communi-
cation process for acquiring the measurement results
from the mobile devices, as we consider that there
are a lot of solutions available, each of which would
deserve a thorough analysis. For example, the mo-
biles could have a software installed that executes to
have measurements taken at random time instants and
transmit the results, along with their geographical co-
SENSORNETS 2017 - 6th International Conference on Sensor Networks
24

ordinates, to a central unit for deriving the estimate.
Other solutions could involve the sending of query
messages, e.g. from cellular base stations or WLAN
access points. The mobile devices would receive the
messages, execute the measurement and transmit the
result and their position to the sender.
The method should also be checked for its effi-
ciency when the movements of the mobile devices are
described by other mobility models or are not inde-
pendent, as in the cases where they move in groups,
or move towards popular places. The RWP model has
been shown to be a good approximation for modeling
the motion of vehicles in a road (Saha and Johnson,
2004). Models for better approximating human mo-
bility have been described in (Gonzalez et al., 2008;
Rhee et al., 2011), while non-independence of mobile
movements through group mobility models has been
studied in (Musolesi et al., 2004),(Lee et al., 2009).
The RWP model is a super-diffusive model, which
means that there is a higher probability of longer dis-
placements; hence the mobile locations are likely to
be even more concentrated towards the center in a
more realistic model. Clustered user movements will
skew the location distribution, so that the estimated
average is farther from the true value. Neverthe-
less, the method with stratification has the effect of
smoothing out the skewness and therefore could still
produce a significant improvement. As a matter of
fact, the higher the skewness, the higher the expected
bias reduction by the stratification method. Therefore
we expect even more gains by applying the stratifi-
cation method under more realistic mobility models,
than under the RWP model.
Furthermore, we have not been concerned with the
accuracy of single user measurements, or the effect of
noise in such measurements. The authors in (Fiore
et al., 2013) showed that the accuracy of the mea-
surements collected by the users plays a more critical
role than the number of users participating in crowd-
sensing, and an accurate overall estimate can be ob-
tained with a relatively small number of accurate user
measurements. Hence it is important to examine the
accuracy of user measurements, and filter out mea-
surements that are suspected to be inaccurate. In the
application scenario examined in this paper, devices
in vehicles could more accurately measure ambient
temperature than devices carried by humans, as direct
contact with ambient air is always achieved. In both
cases, filtering of measurements would be required to
eliminate possible sources of bias: indoor environ-
ments (detection of indoor/outdoor environment as in
(Krumm and Hariharan, 2004)), human contact with
the sensor, exhaustion gas from other vehicles, etc.
Finally, there exist many other challenges for con-
ducting crowdsensing measurements, such as provid-
ing participation incentives to the users, or protecting
from malicious users who may “pollute” the data. In-
terested readers are referred to the surveys (Ma et al.,
2014; Ganti et al., 2011) for basic information.
REFERENCES
Antonic, A., Bilas, V., Marjanovic, M., Matijasevic, M.,
Oletic, D., Pavelic, M., Zarko, I. P., Pripuzic, K.,
and Skorin-Kapov, L. (2014). Urban crowd sensing
demonstrator: Sense the Zagreb air. In Software,
Telecommunications and Computer Networks (Soft-
COM), 2014 22nd International Conference on, pages
423–424. IEEE.
Bash, B. A., Byers, J. W., and Considine, J. (2004). Approx-
imately uniform random sampling in sensor networks.
In Proceeedings of the 1st international workshop on
Data management for sensor networks: in conjunc-
tion with VLDB 2004, pages 32–39. ACM.
Bettstetter, C. and Wagner, C. (2002). The spatial node
distribution of the random waypoint mobility model.
WMAN, 11:41–58.
Cochran, W. G. (1946). Relative accuracy of systematic
and stratified random samples for a certain class of
populations. The Annals of Mathematical Statistics,
pages 164–177.
Considine, J., Li, F., Kollios, G., and Byers, J.
(2004). Approximate aggregation techniques for sen-
sor databases. In Data Engineering, 2004. Proceed-
ings. 20th International Conference on, pages 449–
460. IEEE.
Datta, S. and Kargupta, H. (2007). Uniform data sampling
from a peer-to-peer network. In Distributed Com-
puting Systems, 2007. ICDCS’07. 27th International
Conference on, pages 1–8. IEEE.
Fiore, M., Nordio, A., and Chiasserini, C.-F. (2013). In-
vestigating the accuracy of mobile urban sensing. In
Wireless On-demand Network Systems and Services
(WONS), 2013 10th Annual Conference on, pages 25–
28. IEEE.
Ganesan, D., Ratnasamy, S., Wang, H., and Estrin, D.
(2004). Coping with irregular spatio-temporal sam-
pling in sensor networks. ACM SIGCOMM Computer
Communication Review, 34(1):125–130.
Ganti, R. K., Ye, F., and Lei, H. (2011). Mobile crowdsens-
ing: current state and future challenges. Communica-
tions Magazine, IEEE, 49(11):32–39.
Glynn, P. and Sigman, K. (1998). Independent sampling of
a stochastic process. Stochastic processes and their
applications, 74(2):151–164.
Gonzalez, M. C., Hidalgo, C. A., and Barabasi, A.-L.
(2008). Understanding individual human mobility
patterns. Nature, 453(7196):779–782.
Hyyti
¨
a, E., Lassila, P., and Virtamo, J. (2006). Spatial node
distribution of the random waypoint mobility model
with applications. IEEE Transactions on Mobile Com-
puting, 5(6):680–694.
Estimating Spatial Averages of Environmental Parameters based on Mobile Crowdsensing
25

Kempe, D., Dobra, A., and Gehrke, J. (2003). Gossip-based
computation of aggregate information. In Foundations
of Computer Science, 2003. Proceedings. 44th Annual
IEEE Symposium on, pages 482–491. IEEE.
Krumm, J. and Hariharan, R. (2004). Tempio: in-
side/outside classification with temperature. In Sec-
ond International Workshop on Man-Machine Symbi-
otic Systems.
Kurant, M., Gjoka, M., Butts, C. T., and Markopoulou, A.
(2011). Walking on a graph with a magnifying glass:
stratified sampling via weighted random walks. In
Proceedings of the ACM SIGMETRICS joint interna-
tional conference on Measurement and modeling of
computer systems, pages 281–292. ACM.
Lee, K., Hong, S., Kim, S. J., Rhee, I., and Chong, S.
(2009). Slaw: A new mobility model for human
walks. In INFOCOM 2009, IEEE, pages 855–863.
IEEE.
Ma, H., Zhao, D., and Yuan, P. (2014). Opportunities in
mobile crowd sensing. Communications Magazine,
IEEE, 52(8):29–35.
Massouli
´
e, L., Le Merrer, E., Kermarrec, A.-M., and
Ganesh, A. (2006). Peer counting and sampling in
overlay networks: random walk methods. In Proceed-
ings of the twenty-fifth annual ACM symposium on
Principles of distributed computing, pages 123–132.
ACM.
Mitzenmacher, M. and Upfal, E. (2005). Probability and
computing: Randomized algorithms and probabilistic
analysis. Cambridge University Press.
Muller, C., Chapman, L., Johnston, S., Kidd, C., Illing-
worth, S., Foody, G., Overeem, A., and Leigh, R.
(2015). Crowdsourcing for climate and atmospheric
sciences: current status and future potential. Interna-
tional Journal of Climatology.
Musolesi, M., Hailes, S., and Mascolo, C. (2004). An ad
hoc mobility model founded on social network theory.
In Proceedings of the 7th ACM international sympo-
sium on Modeling, analysis and simulation of wireless
and mobile systems, pages 20–24. ACM.
Oke, T. R. (2002). Boundary layer climates. Routledge.
Quenouille, M. H. (1949). Problems in plane sampling. The
Annals of Mathematical Statistics, pages 355–375.
Rhee, I., Shin, M., Hong, S., Lee, K., Kim, S. J., and Chong,
S. (2011). On the levy-walk nature of human mobil-
ity. IEEE/ACM transactions on networking (TON),
19(3):630–643.
Ripley, B. D. (2004). Spatial statistics, volume 575. John
Wiley & Sons.
Saha, A. K. and Johnson, D. B. (2004). Modeling mobility
for vehicular ad-hoc networks. In Proceedings of the
1st ACM international workshop on Vehicular ad hoc
networks, pages 91–92. ACM.
Shrivastava, N., Buragohain, C., Agrawal, D., and Suri, S.
(2004). Medians and beyond: new aggregation tech-
niques for sensor networks. In Proceedings of the
2nd international conference on Embedded networked
sensor systems, pages 239–249. ACM.
Stutzbach, D., Rejaie, R., Duffield, N., Sen, S., and Will-
inger, W. (2009). On unbiased sampling for unstruc-
tured peer-to-peer networks. IEEE/ACM Transactions
on Networking (TON), 17(2):377–390.
Unger, J., S
¨
umeghy, Z., and Zoboki, J. (2001). Temperature
cross-section features in an urban area. Atmospheric
Research, 58(2):117–127.
van der Hoeven, F., Wandl, A., Demir, B., Dikmans, S., Ha-
goort, J., Moretto, M., Sefkatli, P., Snijder, F., Songsri,
S., Stijger, P., et al. (2014). Sensing hotterdam: Crowd
sensing the rotterdam urban heat island. SPOOL,
1(2):43–58.
SENSORNETS 2017 - 6th International Conference on Sensor Networks
26
