
Leveraging Robot Programming to Foster Computational Thinking
Ilenia Fronza
1
, Nabil El Ioini
1
and Luis Corral
2
1
Free University of Bozen-Bolzano, Piazza Domenicani 3, 39100 Bolzano, Italy
2
ITESM / UAQ, E. Gonzalez 500, 76130, Queretaro, Mexico
Keywords:
Educational Robotics, Computational Thinking, Maze.
Abstract:
In 2013, ACM recognized Computational Thinking (CT) as “one of the fundamental skills desired of all grad-
uates”. This means that, especially in liberal education environments, one of the challenges of CT courses is to
motivate students who are discouraged upfront as they perceive programming as a difficult task. Applications
that have tangible results typically stimulate students’ interests. For instance, Educational Robotics (ER) is
recognized as a tool to enhance higher order thinking skills and to facilitate teamwork. In this paper, we de-
scribe a course that has been designed to use ER (i.e., programming a maze-solving robot) to foster CT. Each
activity of the course has been designed to foster specific CT skills and to contribute to CT assessment, which
remains a challenge in CT research. We report the results of an experiment, in a liberal education environment,
with a total of 13 ninth graders (15.4% M, 84.6% F).
1 INTRODUCTION
Computational Thinking (CT) consists of “the
thought processes involved in formulating a problem
and expressing its solution(s) in such a way that a
computer - human or machine - can effectively carry
out” (Wing, 2014). In 2013, ACM recognized CT
as “one of the fundamental skills desired of all grad-
uates” (Joint Task Force on Computing Curricula,
ACM and IEEE Computer Society, 2013). There-
fore, motivational concerns need to be addressed to
engage the broadest audience possible (Settle et al.,
2012), by reaching also students who do not consider
themselves candidates for STEM disciplines (Prey
and Weaver, 2013). For example, in liberal educa-
tion environments, students are usually not inclined
to STEM disciplines (Fronza et al., 2015); moreover,
the difficulties in learning computer science (CS) usu-
ally frustrate students and lead many of them to avoid
activities that require programming skills (Stamouli
et al., 2004). Since there is a relationship between
motivation and success in learning CS (Carbone et al.,
2009), motivating students becomes of paramount im-
portance (Alhazbi, 2016). To this end, CT can be used
to show that programmers, beside coding, need for
example to interact with others and look for ideas in
order to solve problems with a computational strategy
(Hambrusch et al., 2009).
Activities that have tangible results typically stim-
ulate students’ interests. Considering this, in the last
few years several teaching approaches have been pro-
posed which use concrete artifacts including mobile
devices (Fronza et al., 2015) or robots (Sarmento
et al., 2015). In particular, the usage of educational
robotics (ER) is not recent and it is now recognized
as a tool to enhance higher order thinking skills and
to facilitate teamwork (Atmatzidou and Demetriadis,
2016). Unfortunately, one of the limitations of ER
is represented by the acquisition costs of robots (Sar-
mento et al., 2015). Recently, low cost do it your-
self (DIY) robots have been proposed to address this
issue; these robots are built on top of open source
hardware specifications and programmable using free
software tools such as Scratch and Coffee (Resnick
et al., 2009; Sarmento et al., 2015).
In this paper, we describe a course at high school
level that has been designed to foster CT skills using
ER. Each activity of the course has been designed to
foster specific CT skills and to allow CT assessment,
which represents a challenge in CT research (Moreno-
Leon et al., 2015). Indeed, identifying what students
are expected to learn in each phase of the course fa-
cilitates the introduction of CT in schools curricula,
as an assessment methodology enables the evaluation
of the success or failure of the course. In this paper
we report the results of the first edition of the course,
with 13 ninth graders (15.4% M, 84.6% F) in a liberal
education environment.
Fronza, I., Ioini, N. and Corral, L.
Leveraging Robot Programming to Foster Computational Thinking.
DOI: 10.5220/0006310101090116
In Proceedings of the 9th International Conference on Computer Supported Education (CSEDU 2017) - Volume 2, pages 109-116
ISBN: 978-989-758-240-0
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
109
The paper is organized as follows: Section 2 pro-
vides background information; Section 3 details the
structure of the course; Section 4 reports the results
of the first edition of the course; Section 5 draws con-
clusions and provides directions for further research.
2 BACKGROUND
Computational Thinking. Ten years have passed
since the publication of Jeannette Wing’s seminal ar-
ticle on CT (Wing, 2006). During these ten years,
media have been heavily promoting coding and pro-
gramming (Crow, 2014); while this has represented
an important change respect to teaching only com-
puter literacy (Fronza et al., 2014), focusing only on
coding ignores the broader aims of CT. Indeed, cod-
ing is a tool for supporting CT (Bateman, 2014), but
the operational definition of CT (Table 1) involves
concepts, practices, and perspectives (Brennan and
Resnick, 2012) that are not strictly related to coding
and therefore can be fostered using other tools and ac-
tivities (Catlin and Woollard, 2014). The same holds
for the skills included in the definition of CT (Table
2) proposed in 2011 in (ISTE and CSTA, 2011).
Table 1: The three CT dimensions (Brennan and Resnick,
2012).
CT dimen-
sions
Definition
Computational
concepts
• Sequences
• Loops
• Events
• Parallelism
• Conditionals
• Operators
• Data
Computational
practices
• Being incremental and iterative
• Testing and debugging
• Reusing and remixing
• Abstracting and modularizing
Computational
perspectives
• Expressing
• Connecting
• Questioning
Research has recently focused on defining curric-
ula for teaching CT. However, gaps still exist that call
out for empirical inquiries, in particular in the K-12
context (Grover and Pea, 2013) to understand what
CT concepts should be learned in the different stages
of schooling (Voogt et al., 2015). Moreover, there is
a need to teach learners how to use CT within the
disciplines (Hemmendinger, 2010). Another part of
current research deals with the need of evaluating the
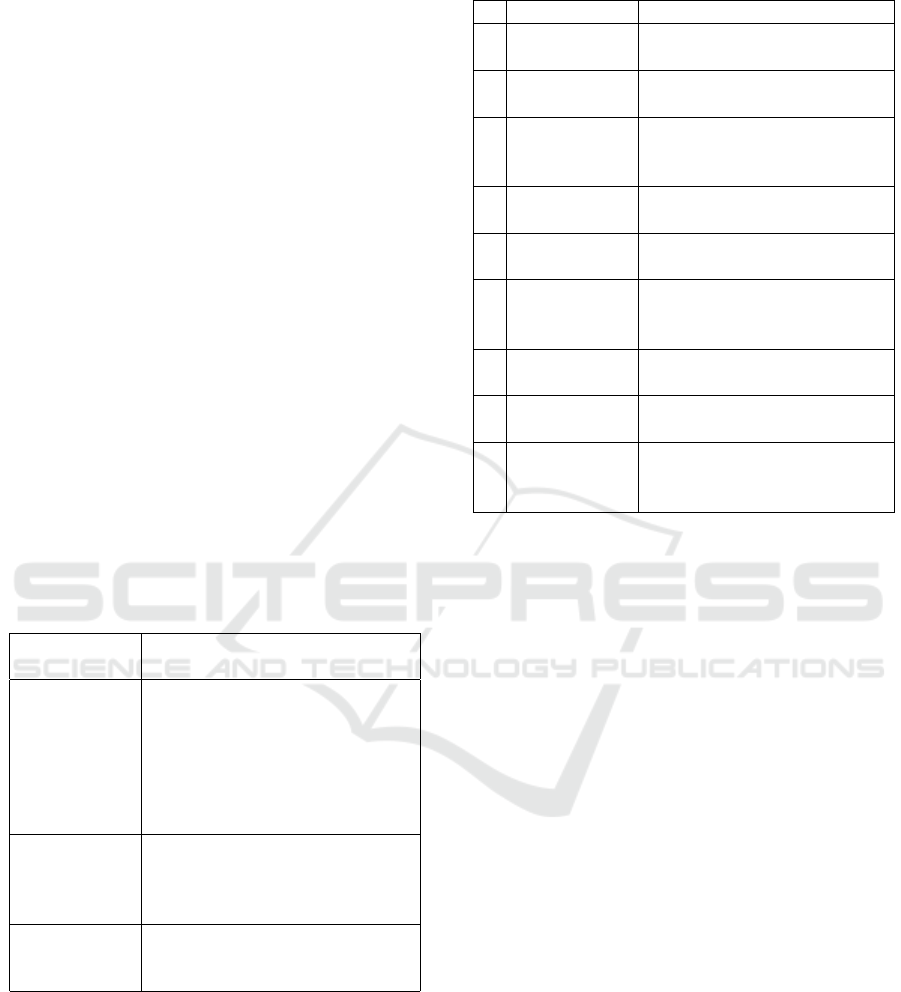
Table 2: Skills improved by CT (ISTE and CSTA, 2011).
Skill Definition
1 Data collec-
tion
Gather appropriate informa-
tion
2 Data analysis Make sense of data, find pat-
terns, and draw conclusions
3 Data repre-
sentation
Depict and organise data in
appropriate graphs, charts,
words, or images
4 Problem de-
composition
Break down a problem into
smaller, manageable parts
5 Abstraction Reduce complexity to define
main idea
6 Algorithms
and proce-
dures
Find a series of ordered steps
to solve a problem
7 Automation Have computers or machines
do repetitive or tedious tasks
8 Simulation Run experiments using mod-
els
9 Parallelization Organise resources to simul-
taneously carry out tasks to
reach a common goal
effectiveness of CT courses (Brennan and Resnick,
2012; Moreno-Leon et al., 2015; Werner et al., 2012).
Educational Robotics (ER). ER allows to reach a
wide audience, as robots typically stimulate students’
interests (Catlin and Woollard, 2014). Besides gain-
ing students’ attention, ER provides opportunities to
teach CT; indeed, ER integrates several areas, such as
programming and engineering design (Shoop et al.,
2016). Moreover, working with robots is normally
done in groups; this creates a powerful environment
to foster CT practices and perspectives, such as con-
necting with others and expressing ideas (Table 1).
Acquisition costs of robots have been recently re-
duced by the availability of relatively cheap hardware,
which even allows to build robots independently. For
this reason, research has been recently exploring the
possibility to program robots using free and open
source programming tools languages. Among them,
visual programming languages (VPL) are becoming
one of the most common choice for ER, given their
popularity in schools (Resnick et al., 2009; Sarmento
et al., 2015) and their ability to foster CT (Brennan
and Resnick, 2012). For instance, Sarmento et al.
(2015) propose a solution (called Coffee) in which a
VPL is used to program robots. The same paper pro-
vides an overview of the existing robots and program-
ming environments. Nevertheless, the paper does not
clarify how exactly the proposed activities contribute
to the development of CT skills.
CSEDU 2017 - 9th International Conference on Computer Supported Education
110
3 COURSE DESCRIPTION
CT courses need to be able to engage the broadest
audience possible (Settle et al., 2012; Wing, 2006),
by reaching also the students who do not consider
themselves candidates for STEM disciplines (Prey
and Weaver, 2013). This means that courses need to
be able to motivate possible uninterested learners in
the classroom, for example in a liberal education con-
text. Moreover, it is clearly important to avoid losing
the gained attention; this might happen, for example,
if the students perceive the programming part as not
accessible to them (Alhazbi, 2016), which is not an
off chance in a liberal education context where the
main disciplines can be, for example, humanities and
social sciences.
The goal of the course proposed in this paper is
to foster CT skills through ER. The course leverages
students’ general curiosity for robots to gain their in-
terest (Catlin and Woollard, 2014). Moreover, CT is
used to show that, with a computational strategy, pro-
gramming a robot can be an accessible task; CT is
also used as a means to show that programmers, be-
side coding, need for example to interact with oth-
ers to solve problems with a computational strategy
(Hambrusch et al., 2009). The remaining part of this
section describes tools and structure of the course,
which have been chosen to foster CT skills.
3.1 Tools
As suggested in (Sung and Samuel, 2014), our course
pursues technology-independent learning outcomes.
Indeed, in our course programming a robot is not the
main focus, but it is used as a tool to support the cog-
nitive tasks (i.e., CT) involved in ER (Fronza et al.,
2015). In this view, preference was given to tools that
allow fostering CT skills.
As a robot, we chose mBot
1
, which is proposed
in the market as an all-in-one solution to enjoy the
hands-on experience of programming, electronics,
and robotics. The main reasons of our choice are:
• It is relatively cheap (i.e., around 100 USD). This
was one of our most important requirements, be-
cause it increases the possibility to activate this
course in schools. Moreover, affordable robots
can be bought by the families of those students
keen on programming at home.
• It can be programmed with mBlock
2
, a VPL in-
spired by Scratch 2.0, which is considered a good
tool to foster CT (Brennan and Resnick, 2012).
1
http://learn.makeblock.com/en/mbot/
2
http://www.mblock.cc
Moreover, Scratch is very popular in schools, and
this reduces the time dedicated to learning the tool
set.
• mBot can be programmed also using the Arduino
IDE. Therefore, learners can progress on to Ar-
duino programming, and more expert students can
program directly using the Arduino IDE.
The goal was to build a maze and instruct the robot
to find its way out of it. To build the maze, we printed
on two A0 posts a grid of black lines (3 cm width)
crossing every 22.5 cm. We used home made 3D-
printed pegs
3
to hold up cardboard walls. The result-
ing maze is shown in Figure 1. This design was cho-
sen to foster creativity and experimentation, since it
allows the students to design many mazes just moving
walls. Moreover, it is light and portable, thus it can be
used in different rooms easily. Finally, it is relatively
cheap, which increases the possibility to activate this
course.
For an initial training on using mBot and its sen-
sors, we used a simple follow line example provided
as part of the mBot kit.
Figure 1: The tool set used in the course.
3.2 Structure of the Course
The course consists of four phases (10 hours in total,
split in 3 days). In each phase, particular importance
is given to organized work and documentation. By
the end of the course, the participants are expected to
3
http://www.thingiverse.com/thing:1169585
Leveraging Robot Programming to Foster Computational Thinking
111

present their final solution in front of the class. This
section explains all the phases of the course, and de-
tails how each phase has been designed to foster spe-
cific CT skills.
1. Introduction to mazes (1 hour). In this phase,
we provide a brief historical outline about mazes. Ac-
cording to J. Wing’s definition, applying CT does not
only mean solving a problem, but also formulating it
(Wing, 2014). The goal of this phase is to let the par-
ticipants brainstorm to formulate the problem them-
selves, step by step, instead of having a problem pro-
vided by the teacher. Moreover, in this phase the stu-
dents start collecting, analysing and representing rel-
evant data (Table 3). For instance, the students should
ask: who is walking in the maze? A robot, or a hu-
man? Which types of mazes exist? Is it always possi-
ble to exit a maze?
Table 3: CT skills (Brennan and Resnick, 2012) fostered
during each phase of the course.
Phase
1 2 3 4
Data collection X X
Data analysis X X
Data representation X X X
Problem decomposition X X X
Abstraction X X X
Algorithms and procedures X X X
Automation X X
Simulation X X
Parallelization X
2. Solving mazes without robots (1 hour). In
this phase, each student solves a random generated
maze (printed on paper) and annotates the algorithm
(Figure 2). Afterwards, we distribute a second maze
so that students can understand that their algorithms
are customized to one single maze. This is used to
open a discussion on how robots can be instructed to
solve mazes, independently of their structure.
Figure 2: Finding an algorithm to solve mazes.
As shown in Table 3, this phase exercises multiple
CT skills. First, the students need to decompose the
problem to understand how to exit the maze; second,
they need to grasp the major concepts that define the
problem (i.e., abstraction) and that can be applied to
all mazes. Third, they start working on an algorithm.
3. Learning the tool set (2 hours). In this phase,
the participants familiarize with the tool set that they
will use during the fourth phase. In particular, the goal
is to make students aware of the technical possibilities
(for example, to follow lines using sensors, or to “see”
walls in the maze) that they can use to design their
solution of the problem.
First, the robot is introduced by describing its
structure, sensors, and functionality. Afterwards, as
an introductory exercise, a follow line problem is pro-
posed: the students have to identify the problem, ex-
plain a high-level solution, and then structure a de-
tailed algorithm. The designed solution is imple-
mented by the teacher (and projected to the entire
class) following the students’ ideas, and new compu-
tational concepts are introduced meanwhile. There-
fore, in this phase, the students start working on algo-
rithms, automation and simulation (Table 3). More-
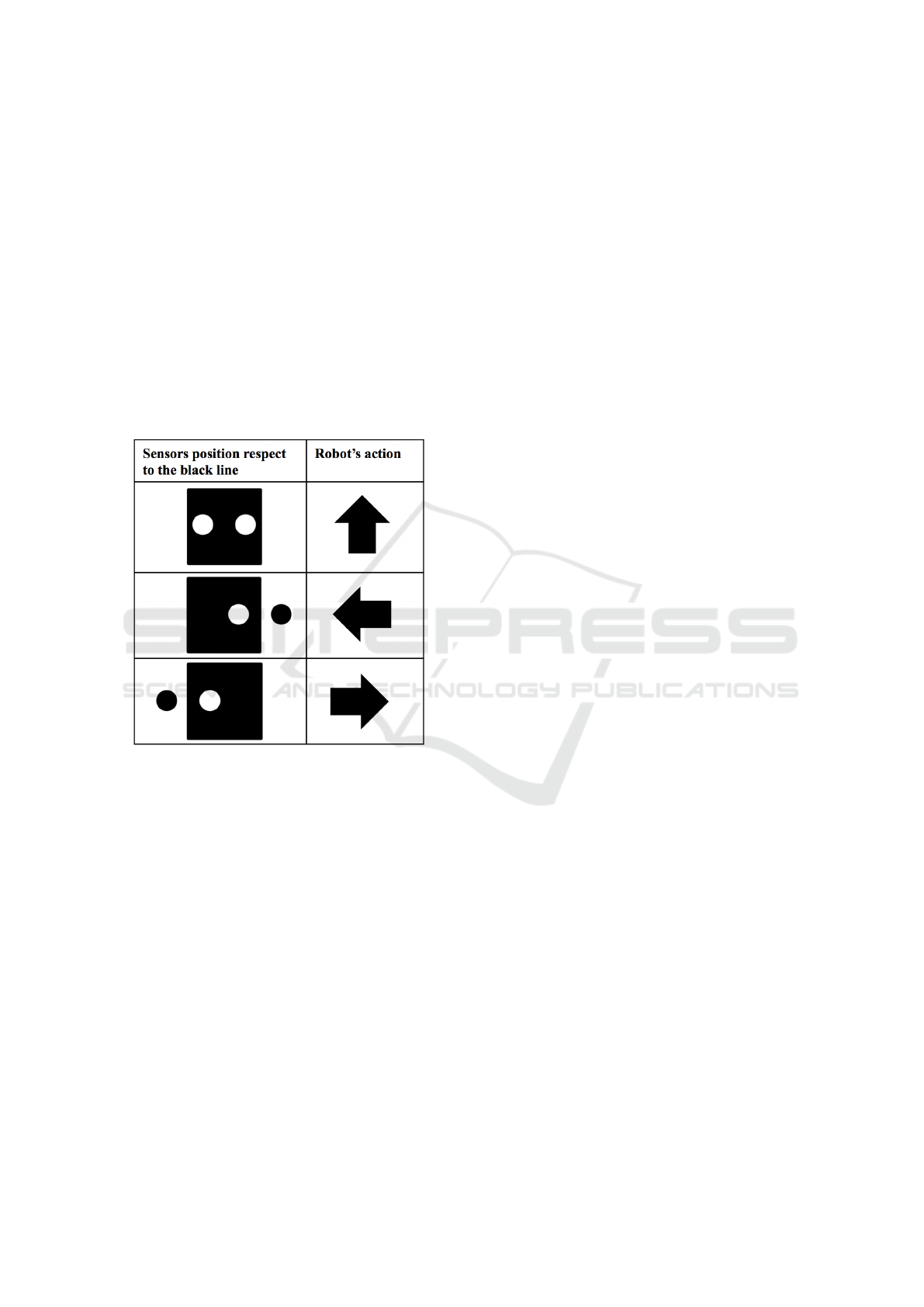
over, data representation skills are exercised. For in-
stance, they sketch a visualization of a possible algo-
rithm to follow a line: 1) the robot goes straight when
both the sensors “see” the black line, 2) it turns right
when the left sensor does not see the black line, and
3) it turns left when the right sensor does not see the
black line.
4. Programming a maze-solving robot (6
hours). In this phase, the students find the solution
for the problem, which consists of coding the robot
to exit a maze. They are free to choose their own ap-
proach, such as following lines or checking the pres-
ence of obstacles (i.e., maze walls); the instructors act
as moderators when needed, and help in designing the
solution or in solving technical problems.
Since ER facilitates teamwork (Atmatzidou and
Demetriadis, 2016), in this phase the students are di-
vided in teams. The idea is to maximize team size
to minimize the number of robots, in order to make
the course financially more accessible to schools. Ac-
cording to the available literature, the optimal group
size is five (Hackman and Vidmar, 1970); in soft-
ware development, though, a common rule suggests
“seven plus or minus three” members (Holzinger
et al., 2005). In bigger teams, the management of
the communication process becomes more difficult;
indeed, after seven members in a team, each addi-
tional member reduces decision effectiveness by 10%
(Blenko et al., 2013). For this reason, we create
teams of four to seven students, and the teachers act
CSEDU 2017 - 9th International Conference on Computer Supported Education
112

as moderators in the teams when needed. Working
in teams also exercises the parallelization skill (ISTE
and CSTA, 2011), as the students need to divide the
tasks and coordinate their activities.
Each team works autonomously to select a strat-
egy just using pen and paper, without computer and
robot. During this activity, we highlight the impor-
tance of the resulting design document: it will guide
the coding activities and will be used as a reference
for testing. Then, the teams start coding in short iter-
ations; this means that each team can use the maze to
test the solution, whenever its members think to have
an improved solution, or want to check if an issue has
been solved. This has the advantage of encouraging
simulations to discover and fix errors sooner; indeed,
robots ease this activity, as most of the times they pro-
vide a direct evidence of the correctness of the solu-
tion. For example, if the robots hits a wall, then its
sensors might not be used correctly.
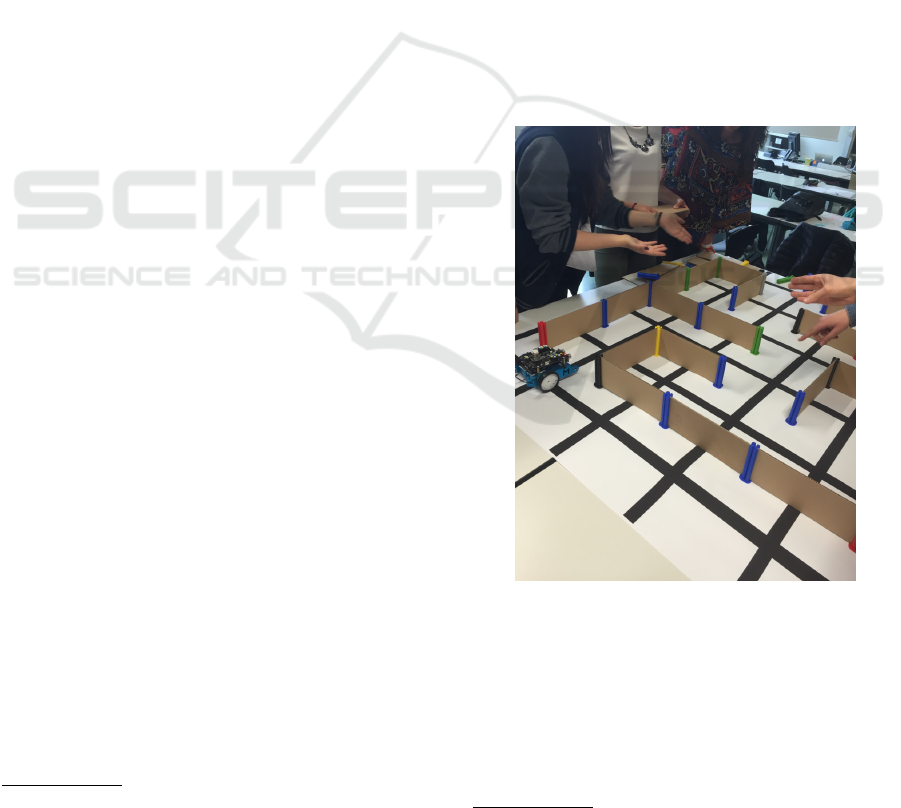
Team competitions are used to improve social en-
gagement (Dicheva et al., 2015): during this phase,
the teams compete to find a solution and can find dif-
ferent solutions to the same problem. The only rule
is that, when one team is testing its solution (there is
just one maze in the room for all the teams), all the
students should stop and participate in the test (Fig-
ure 3); this way, they can learn from others’ mistakes,
or find new ideas and change their own solutions.
Figure 3: All the students check the solutions together, and
try to get new ideas from others’ success or mistakes.
This phase has been designed to stimulate CT di-
mensions (Table 1) and CT skills (Table 3):
• Computational perspectives. Working in teams
fosters the ability of expressing ideas. Moreover,
observing the other teams’ tests improves the abil-
ity of questioning, i.e, criticising a solution or ask-
ing for explanations.
• Computational practices. Students work incre-
mentally and iteratively; moreover, they can reuse
previous code, such as the code written during the
third phase of the course.
• CT skills. This course covers all the CT skills
(ISTE and CSTA, 2011). Indeed, students need
to collect, analyse and represent the information
needed to solve the problem. Moreover, they learn
how to abstract and decompose the problem to
find an algorithm. Finally, they use the robot
to automate the solution, simulate frequently and
work in parallel in the team.
In the next section we detail the results of the first
edition of the course.
4 RESULTS
We experimented the course with 13 ninth graders
(15.4% M, 84.6% F), in a liberal education environ-
ment. In this section, we describe our results in terms
of the students’ performance and the tool set ade-
quacy.
Students’ Performance. ER succeeded in gaining
the participants’ interest: all of them were curious
about the topic, but at the same time they were not
sure to be able to code the robot. Given this cu-
riosity, all the students participated actively in the
brainstorming session of the first phase of the course.
As expected, the main questions that emerged in this
phase were: Which types of mazes exist? Is it al-
ways possible to exit a maze? Can we find existing
algorithms to solve a maze? What is the difference
between a person and a robot in solving a maze?.
During the second phase, the discussion focused
on possible algorithms. The brainstorming session led
to the idea of the so called left-hand (or right-hand)
rule: by keeping the left-hand (or the right-hand) in
contact with one wall of the maze the solver is guaran-
teed to reach the exit. This idea made students brain-
storm on the meaning of “keeping a hand in contact
with a wall” for a robot. Since at this point the stu-
dents did not know the robot’s characteristics, after
some speculations on the topic they decided to solve
the issue later.
During the third phase the participants learned all
the tools they could use to solve the problem. Also,
they learned how to design a solution and represent
information. For instance, Figure 4 shows how they
sketched the solution for the follow line task: the
robot goes straight when both the sensors are on the
black line, and it adjusts its direction (to the left or to
the right) otherwise.
In the fourth phase, two teams of 6 (5 F and 1
M) and 7 (6 F and 1 M) students were created, and
Leveraging Robot Programming to Foster Computational Thinking
113
one instructor was assigned to each team as a mod-
erator. Both the teams managed team dynamics con-
structively; it should be noted here that these students
were trained to teamwork, as they usually work in
teams during project activities at school. The envi-
ronment was relaxed and playful, and all the team
members were able to discuss and collaborate. Dur-
ing the tests of the other team, the participants were
curious and asked questions about the solution; the
testing team, instead, was usually proud of showing
the achieved results. Mistakes (e.g., the robot crash-
ing against a wall) were taken as cheerful moments.
Both the teams did not manage to implement an al-
gorithm similar to the left or right-hand rule. Instead,
they designed the two following solutions.
Figure 4: Participants’ sketch of the main idea of the algo-
rithm to follow a line.
Team A (7 students) tried to implement the left-
hand rule algorithm, using the sensor in front of the
robot as a “hand”, which means that the robot should
turn left “sometimes” to check for the presence of a
wall. The team tried to let the robot turn left at each
cross of two black lines: the robot was starting with
one sensor on the black line and one outside it, and
was turning left when both the sensors were on the
black line (i.e., when two black lines were crossing).
However, the team could not handle the complexity of
the algorithm and decided to adopt another solution in
which the part of the code that recognised crosses was
reused. The final solution included a hard coded logic,
as a specific algorithm was implemented for a spe-
cific maze: go straight until three crosses are counted,
turn left, go right until tow crosses are counted, and
so on. The solution, however, did not work properly,
as the same cross was counted multiple times. Indeed,
the sensors were detecting the same line many times.
Team A did not have enough time to fix the issue, but
the logic behind the solution was correct, even if it
was customised to a single maze.
Team B (6 students) decided, first, to implement
the following algorithm: go straight until an obstacle
is detected, go left if there is no obstacle on the left,
otherwise go right, or go back if there are obstacles
on left and right. Being not able to manage proximity
when looking for walls, and because of lack of time,
also this team decided to implement a hard coded so-
lution. The algorithm is similar to team A’s one, but
the robot turns left or right after a certain distance
(which is specific of the considered maze). This so-
lutions is logically correct but, respect to team A, it
does not use sensors at all.
Even if both the teams have produced an hard
coded solution, it should be considered that having
more time, which was not possibile due to school con-
straints, would have probably allowed the participants
to solve technical issues and implement the general
solutions initially designed. Moreover, programming
the robot was not the main focus of the course, but it
was used as a tool to support the cognitive tasks in-
volved (i.e., CT). Also, it is important to emphasise
that all the participants were happy of their initial so-
lution; some of them, indeed, even asked to extend
the course to do that.
Despite the recent research in this field, assessing
the learning of CT remains a challenge (Meerbaum-
Salant et al., 2010; Moreno-Leon et al., 2015). Cur-
rently, programming environments are most often
used as the basis for assessment (Werner et al., 2012).
For instance, when adopting Brennan and Resnick’s
definition (Table 1) of CT, code inspections can re-
veal if students have been using computational con-
cepts timely (Brennan and Resnick, 2012). Other
forms of assessments, such as interviews or tasks,
are used when adopting other CT definitions (Table
2) or to capture the other dimensions of CT (Table
1). At the end of the course, we analysed the final
projects’ blocks to provide an evidence of the com-
putational concepts that have been used by students
(Brennan and Resnick, 2012). Code inspections re-
vealed that both the teams used the following con-
cepts: sequences, loops, events, conditionals, oper-
ators, and data. Only parallelism was not used, as
expected. To take advantage of all the available time,
which was limited to ten hours, we chose not to in-
sert additional tasks or interviews to complement our
assessment.
Tool Set Adequacy. In general, the tool set was ad-
equate to the course needs. The home-made maze
succeeded in being light and portable. Moreover,
CSEDU 2017 - 9th International Conference on Computer Supported Education
114

the removable walls encouraged experimentation: the
students could create smaller and simpler mazes, or
ad-hoc structures to test their code (e.g., dead-end
streets). One defect of our cardboard walls is that
they can be easily damaged by pegs, if they are in-
serted frequently. For this reason, plastic walls would
be preferable. As for the robot, during the course we
did not encounter relevant problems or damages. The
main problem was represented by the programming
language, mBlock, which does not include some orig-
inal commands of Scratch (e.g., “when Flag clicked”).
For this reason, even expert Scratch users need some
time to learn some concepts. Moreover, it is almost
impossible for beginners to figure out how to use sen-
sors, button, or IR input; indeed, the available docu-
mentation of mBot explains only basic concepts, and
needs some technical knowledge. For this reason,
teachers’ support is fundamental for the success of the
course.
5 CONCLUSION AND FUTURE
WORK
In this paper, we described a course at high school
level that has been designed to foster Computational
Thinking (CT) skills using Educational Robotics
(ER), with the main goal of reaching also the students
who do not consider themselves candidates for STEM
disciplines (Prey and Weaver, 2013), for example in
liberal education environments. We leveraged stu-
dents’ general curiosity for robots (Catlin and Wool-
lard, 2014) and we chose tools and strategies (e.g., vi-
sual programming languages and teamwork) to ease
the learning process. Moreover, CT is used to show
that a good computational strategy can facilitate the
programming part (Hambrusch et al., 2009). We de-
signed each phase of the course to foster specific CT
skills and to contribute to CT assessment (Meerbaum-
Salant et al., 2010; Moreno-Leon et al., 2015).
We experimented the course in a liberal education en-
vironment, with a total of 13 ninth graders (15.4%
M, 84.6% F). The accomplishments of the teaching
program are reflected by the solutions that the stu-
dents developed, under the supervision of the teaching
staff. Both teams have produced hard coded solutions;
nevertheless, having more time available would have
probably allowed the participants to solve technical
issues (mostly caused by the scarce documentation of
the robot) and to implement the general solutions ini-
tially designed. All the participants, however, were
proud of their solutions; some of them, indeed, asked
to extend the course to continue working on the prob-
lem and implement the initially designed solutions.
In a future edition of this course, having more time
available would also allow to insert additional tasks
or interviews to check that all the phases are fostering
the specific CT skills they were designed for.
In general, results of case studies are difficult to gen-
eralize (Wohlin et al., 2000). In our case, more analy-
sis is required to generalize to other situations; there-
fore, further case studies should be conducted involv-
ing students of different (liberal) curricula. Moreover,
other case studies would help in extending and vali-
dating the assessment strategy.
REFERENCES
Alhazbi, S. (2016). Active Blended Learning to Im-
prove Students’ Motivation in Computer Program-
ming Courses: A Case Study, pages 187–204.
Springer International Publishing, Cham.
Atmatzidou, S. and Demetriadis, S. (2016). Advancing
students computational thinking skills through educa-
tional robotics: A study on age and gender relevant
differences. Robotics and Autonomous Systems, 75,
Part B:661 – 670.
Bateman, K. (2014). Let’s not forget the computing
curriculum’s bigger picture: Computational thinking.
http://www.computerweekly.com/feature/Lets-not-
forget-the-computing-curriculums-bigger-picture-
Computational-thinking. Accessed: 21/02/2017.
Blenko, M., Mankins, M., and Rogers, P. (2013). Decide
and Deliver: Five Steps to Breakthrough Performance
in Your Organization. Harvard Business Press.
Brennan, K. and Resnick, M. (2012). New frameworks
for studying and assessing the development of com-
putational thinking. In 2012 Annual Meeting of the
American Educational Research Association, Vancou-
ver, Canada, pages 1–25, Vancouver, Canada. AERA.
Carbone, A., Hurst, J., Mitchell, I., and Gunstone, D.
(2009). An exploration of internal factors influencing
student learning of programming. In Proceedings of
the Eleventh Australasian Conference on Computing
Education-Volume 95, pages 25–34. Australian Com-
puter Society, Inc.
Catlin, D. and Woollard, J. (2014). Educational robots and
computational thinking. In Proceedings of 4th Inter-
national Workshop Teaching Robotics, Teaching with
Robotics and 5th International Conference Robotics
in Education, pages 144–151, Padova, Italy.
Crow, D. (2014). Why every child should learn to code.
http://www.theguardian.com/technology/2014/feb/07/
year-of-code-dan-crow-songkick. Accessed:
21/02/2017.
Dicheva, D., Dichev, C., Agre, G., and Angelova, G. (2015).
Gamification in education: a systematic mapping
study. Educational Technology & Society, 18(3):1–14.
Fronza, I., El Ioini, N., and Corral, L. (2015). Students want
to create apps: Leveraging computational thinking to
teach mobile software development. In Proceedings of
Leveraging Robot Programming to Foster Computational Thinking
115

the 16th Annual Conference on Information Technol-
ogy Education, SIGITE ’15, pages 21–26, New York,
NY, USA. ACM.
Fronza, I., El Ioini, N., Janes, A., Sillitti, A., Succi, G.,
and Corral, L. (2014). If I had to vote on this lab-
oratory, I would give nine: Introduction on Compu-
tational Thinking in the lower secondary school: Re-
sults of the experience. Mondo Digitale, 13(51):757–
765.
Grover, S. and Pea, R. (2013). Computational thinking in
k–12. a review of the state of the field. Educational
researcher, 42(1):38–43.
Hackman, J. R. and Vidmar, N. J. (1970). Effects of size
and task type on group performance and member re-
actions. Sociometry, 33:37–54.
Hambrusch, S., Hoffmann, C., Korb, J. T., Haugan, M., and
Hosking, A. L. (2009). A multidisciplinary approach
towards computational thinking for science majors.
SIGCSE Bull., 41(1):183–187.
Hemmendinger, D. (2010). A plea for modesty. ACM In-
roads, 1(2):4–7.
Holzinger, A., Errath, M., Searle, G., Thurnher, B., and
Slany, W. (2005). From extreme programming and
usability engineering to extreme usability in soft-
ware engineering education. In 29th Annual Interna-
tional Computer Software and Applications Confer-
ence (COMPSAC’05), volume 1, pages 169–172.
ISTE and CSTA (2011). Operational definition
of computational thinking for k-12 education.
http://csta.acm.org/Curriculum/sub/CurrFiles/ Comp-
ThinkingFlyer.pdf. Accessed: 21/02/2017.
Joint Task Force on Computing Curricula, ACM and IEEE
Computer Society (2013). Computer Science Curric-
ula 2013: Curriculum Guidelines for Undergraduate
Degree Programs in Computer Science. ACM, New
York, NY, USA. 999133.
Meerbaum-Salant, O., Armoni, M., and Ben-Ari, M. M.
(2010). Learning computer science concepts with
scratch. In Proceedings of the Sixth International
Workshop on Computing Education Research, ICER
’10, pages 69–76, New York, NY, USA. ACM.
Moreno-Leon, J., Robles, G., and Roman-Gonzalez, M.
(2015). Dr. scratch: Automatic analysis of scratch
projects to assess and foster computational thinking.
RED-Revista de Educacin a Distancia, 46:1–23.
Prey, J. C. and Weaver, A. C. A. (2013). Fostering gender
diversity in computing. Computer, 46(3):22–23.
Resnick, M., Maloney, J., Monroy-Hern
´
andez, A., Rusk,
N., Eastmond, E., Brennan, K., Millner, A., Rosen-
baum, E., Silver, J., Silverman, B., et al. (2009).
Scratch: programming for all. Communications of the
ACM, 52(11):60–67.
Sarmento, H. R., Reis, C. A. S., Zaramella, V., Almeida, L.
D. A., and Tacla, C. A. (2015). Supporting the Devel-
opment of Computational Thinking: A Robotic Plat-
form Controlled by Smartphone. In Proceedings of
the Second International Conference on Learning and
Collaboration Technologies, volume 9192 of Lecture
Notes in Computer Science, pages 124–135. Springer
International Publishing.
Settle, A., Franke, B., Hansen, R., Spaltro, F., Jurisson, C.,
Rennert-May, C., and Wildeman, B. (2012). Infus-
ing computational thinking into the middle- and high-
school curriculum. In Proceedings of the 17th ACM
Annual Conference on Innovation and Technology in
Computer Science Education, ITiCSE ’12, pages 22–
27, New York, USA. ACM.
Shoop, R., Flot, J., Friez, T., Schunn, C., and Witherspoon,
E. (2016). Can computational thinking practices be
taught in robotics classrooms? In International Tech-
nology and Engineering Education Conference, pages
1–15. Carnegie Mellon Robotics Academy/University
of Pittsburgh.
Stamouli, I., Doyle, E., and Huggard, M. (2004). Establish-
ing structured support for programming students. In
Frontiers in Education, 2004. FIE 2004. 34th Annual,
pages F2G–5. IEEE.
Sung, K. and Samuel, A. (2014). Mobile application devel-
opment classes for the mobile era. In Proceedings of
the 2014 Conference on Innovation and Technology in
Computer Science Education, ITiCSE’14, pages 141–
146, New York, NY, USA. ACM.
Voogt, J., Fisser, P., Good, J., Mishra, P., and Yadav, A.
(2015). Computational thinking in compulsory edu-
cation: Towards an agenda for research and practice.
Education and Information Technologies, 20(4):715–
728.
Werner, L., Denner, J., Campe, S., and Kawamoto, D. C.
(2012). The fairy performance assessment: Measuring
computational thinking in middle school. In Proceed-
ings of the 43rd ACM Technical Symposium on Com-
puter Science Education, SIGCSE ’12, pages 215–
220, New York, NY, USA. ACM.
Wing, J. M. (2006). Computational thinking. Comm. ACM,
49(3).
Wing, J. M. (2014). Computational thinking benefits so-
ciety. http://socialissues.cs.toronto.edu. Accessed:
21/02/2017.
Wohlin, C., Runeson, P., H
¨
ost, M., Ohlsson, M. C., Regnell,
B., and Wessl
´
en, A. (2000). Experimentation in soft-
ware engineering: an introduction. Kluwer Academic
Publishers, Norwell, MA, USA.
CSEDU 2017 - 9th International Conference on Computer Supported Education
116
