
Predictive Failure Recovery in Constraint-aware Web Service
Composition
Touraj Laleh, Joey Paquet, Serguei Mokhov and Yuhong Yan
Concordia University, Montreal, Quebec, Canada
Keywords:
Web Service Composition, Service Constraints, Service Failure Recovery.
Abstract:
A large number of web service composition methods have been proposed. Most of them are based on the
matching of input/output and QoS parameters. However, most services in the real world have conditions or re-
strictions that are imposed by their providers. These condition should be met to ensure the correct execution of
the service. Therefore, constraint-aware service composition methods are proposed to take care of constraints
both at composition and execution time. Failure to meet constraints inside a composite plan results in the fail-
ure of execution of the whole composite service. Recovery from such failures implies service usage rollback
as an alternate plan is found to continue the execution to completion. In this paper, a constraint-aware failure
recovery approach is proposed to predict failures inside a composite service. Then, a method is proposed to
do failure recovery based on those predictions and minimize the number of service rollbacks. The proposed
solution includes an AI-planning-based algorithm and a novel constraint processing method for service failure
prediction and recovery. A publicly available test set generator is used to evaluate and analyze the proposed
solution.
1 INTRODUCTION
Web services are self-contained, self-describing,
modular applications that can be published, located,
and invoked across the Web (Rao and Su, 2005).
Services can be registered and subsequently selected
based on customer’s requirements. However, if there
is no specific web service that can fulfill a customer’s
requirements, there should be a possibility to com-
bine existing services together to accomplish a user-
specified task. Automatic web-service composition
(AWSC) consists in the automated design of an appro-
priate combination of existing web services to achieve
a global goal. A large number of approaches have
been proposed to solve AWSC and most of them
involve mixing and matching web services compo-
nents according to their input, output and QoS fea-
tures (Ponnekanti and Fox, 2002; L
´
ecu
´
e and L
´
eger,
2006; Berardi et al., 2003; Oh et al., 2008; Zheng and
Yan, 2008; Hashemian and Mavaddat, 2005). There
are limitations and preferences, called constraints,
that must be considered to ensure correct execution of
composite services. Such preferences and limitations
which are specified by customers are called customer
constraints. Furthermore, services have usage restric-
tions and QoS limitations (called service constraints)
that are imposed by their providers.
For a composite service, the set of constraints are
derived from the union of all constraints of the ser-
vices that compose them. Whenever a composite ser-
vice is executed, all its constraints should be verified
to ensure its correct execution. Constraint verification
for a composite service is different from constraint
verification for a single service. The constraints of
an individual service only have to be verified before
its execution. However, constraints applied on a com-
posite service can be verified during its execution, as
each individual component service is executed. In-
deed, the verification of some individual services con-
straints actually depend on the values that are to be
provided by users or other services during the execu-
tion of a composite service. In this situation, if the
restrictions that are set by these constraints will not
be met at execution time, the service execution fails
and consequently fails the execution of the compos-
ite service. This failure might result in service roll-
backs if some already used services have to be re-
placed in order to successfully execute a composite
service. For example, consider a composite shopping
service including product search, payment and ship-
ment services, where the shipment service can only
ship products to specific areas in North America. Dur-
ing the execution of a shopping task, if the search
service selects a product outside North America and
Laleh, T., Paquet, J., Mokhov, S. and Yan, Y.
Predictive Failure Recovery in Constraint-aware Web Service Composition.
DOI: 10.5220/0006313802410252
In Proceedings of the 7th International Conference on Cloud Computing and Services Science (CLOSER 2017), pages 213-224
ISBN: 978-989-758-243-1
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
213

payment service makes a payment, the shipment ser-
vice fails the execution of the whole composite ser-
vice even though the order has already been paid be-
fore the shipment service fails. In this case, the exe-
cution of the payment service needs to be rolled back.
This is an example that shows how service constraint
failure can result in the failure of the execution of a
composite service, where rollback is necessary in or-
der to fix the situation.
Many failure recovery approaches have been pro-
posed to manage and recover failure in the execution
of composite services (Gao et al., 2011). Web service
transaction (WST) approaches (Dolog et al., 2014;
Xu et al., 2016; El Hadad et al., 2010) use recovery
mechanisms, including forward and backward recov-
ery. Forward recovery attempts to reach the original
goal of the composite service by retrying or replacing
components and continuing the process. Backward
recovery is essentially a form of rollback that unrolls
the transaction and tries to find another solution.
Some approaches consider component services
constraints in web service composition (Wang et al.,
2014; Wang et al., 2015). In these approaches, con-
straints are embedded inside a composite plan to be
verified as the composite service is being executed.
However, current failure recovery approaches do
not consider individual service constraints.Therefore,
these approaches are not useful for the execution of
constraint-aware composite services because anytime
a service is added or removed from a composite ser-
vice, the set of constraints of the composite service
needs to be updated accordingly. In addition, fail-
ure recovery approaches start recovery from the bro-
ken point in the plan and if the plan cannot be recov-
ered from the broken point, the results of all services
have been executed before the broken point should
be rolled back (Dolog et al., 2014; Xu et al., 2016;
El Hadad et al., 2010). Wang et. al (Wang et al., 2014)
proposed a formal constraint-aware service composi-
tion method and introduced conditional branch struc-
tures into the process model of a solution. Then
in (Wang et al., 2015), the uncertain effects of com-
posite service execution are managed. In (Xu et al.,
2016) a framework to improve and optimize the suc-
cess rate of transactional composite services is pro-
posed. (Dolog et al., 2014) introduced an approach
to model compensation capabilities and requirements
using a forward recovery approach and proposed a
framework to reduce time and resource waste.
In this paper, a constraint-aware failure predication
and recovery approach is proposed to to reduce the
cost of service failures inside a composite plan us-
ing failure prediction. We provide a novel solution to
assemble a composite service package including all
possible solutions for a service composition problem.
There are approaches that have tried to address
problems related to constraint verification, failure re-
covery and web service composition reliability. To the
best of our knowledge, no approach provides a sin-
gle solution for all the above problems. First, through
some real-world business scenarios, we describe the
problem. Second, a new constraint-aware composite
service model is discussed. An algorithm to combine
all possible solutions and create a composite service
package is developed. Finally, two constraint-aware
execution algorithms are developed to enable the ex-
ecution of constraint-aware composite service pack-
ages. Section 1.1 describes a real world business sce-
nario to show the issues involved. Section 1.2 dis-
cusses related work. Section 2 provides definitions
for our composite service model and discusses re-
search issues, and describes our proposed solutions
for constraint-aware web service composition. Sec-
tion 3 describes our approach to execute constraint-
aware composite services, including recovery upon
failure. A comparative experimental analysis of our
approach versus other solutions is presented and dis-
cussed in Section 4. Finally, Section 5 concludes this
paper.
1.1 Motivation Scenario
Consider a shopping application that consists of a set
of tasks: searching for products, submitting an or-
der, paying for the order, and shipping/delivery of
the order. A customer application makes a request
to the composition engine for a composite service
that lets a user with a DeliveryAddress order a prod-
uct (ProductName) and do the shipment. The user
also specifies a constraint on the cost of the compos-
ite service. The available individual services are de-
picted in Table 1. For instance, the three shipping ser-
vices have different applicable constraints, e.g., the
standard shipping service (w
3
) is available only for
products whose delivery address is located in Mon-
treal; two-day delivery (w
4
) is available only for or-
ders whose delivery address is located in the province
of Quebec; while other shipping services (w
7
and w
8
)
are available for orders found in the other regions of
Canada. Given the customer constraints and all re-
spective service constraints, Figure 1 shows all pos-
sible composition plans that could fulfill the request
from the customer.
Based on what we discussed in Section 1.1,
there are three composition plans for the shopping
service request that can accomplish the shopping
task. In each plan, the shipment service has its
CLOSER 2017 - 7th International Conference on Cloud Computing and Services Science
214

Table 1: Available Services.
# Service Input Output Cost Constraints
W
1
Search {ProductName, {ProductNumber, 0.4 C
1
=
/
0
DeliveryAddress} ProductAddress}
W
2
Order/Payment {ProductNumber} {PaymentNumber, 4 C
2
=
/
0
OrderNumber}
W
3
Shipment {PaymentNumber, {ShipmentConfirm} 2 C
31
= DeliveryAddress ∈ Montreal
DeliveryAddress, C
32
= ProductAddress ∈ Montreal
ProductAddress,
OrderNumber}
W
4
Shipment {PaymentNumber, {ShipmentConfirm} 2.5 C
41
= DeliveryAddress ∈ Quebec
DeliveryAddress, C
42
= ProductAddress ∈ Quebec
ProductAddress,
OrderNumber}
W
5
Order {ProductNumber} {OrderNumber} 3 C
5
=
/
0
W
6
Payment {ProductNumber} {PaymentConfirm} 3 C
6
=
/
0
W
7
Shipment {PaymentConfirm, {ShipmentConfirm} 1 C
71
= DeliveryAddress ∈ Canada
DeliveryAddress, C
72
= ProductAddress ∈ Canada
ProductAddress,
OrderNumber}
W
8
Shipment {PaymentConfirm, {ShipmentConfirm} 10 C
81
= ProductAddress ∈ Canada
DeliveryAddress, C
82
= DeliveryAddress ∈ Canada
ProductAddress,
OrderNumber}
Figure 1: Possible composition plans.
own constraints based on the ProductAddress and
DeliveryAddress of the orders. Consider that a user
wants to use the composite service to buy a book.
Given that the user specified cost optimization as a
requirement, composition 1 (Figure 1) will be picked
for shopping as the best composite service (minimum
cost). During the execution of the composition plan,
after searching the book (executing w
1
), it may turn
out that the product address is in Toronto. In this case,
after ordering the product and making the payment
(executing w
2
), the execution of the shipment service
(w
3
) fails, as the product’s address is not in Montreal.
In this situation, w
1
and w
2
have already been exe-
cuted and their executions results need to be rolled
back.
This example shows that there are constraints (e.g.
shipment constraint related to the delivery address)
that can be verified before execution of the first ser-
vice in the composition plan. However, some ser-
vice constraints can only be verified during the ex-
ecution (e.g. constraint related to product address)
and their failure can fail the execution of the whole
composite service. These sorts of failures cannot be
predicted at composition time, as the verification de-
pends on the values that are going to be produced
during the execution of the composite service (e.g.
ProductAddress). In this situation, a failure recovery
approach is required to recover the plan. In (Xu et al.,
2016; Gao et al., 2011) different dynamic failure
recovery approaches are discussed including back-
ward and forward recovery approaches. These ap-
proaches only start recovery in case a service failure
happens. Backward recovery approaches (El Hadad
et al., 2010) mostly need to rollback effects of ex-
ecuted services (w
1
and w
2
) and find an alternative
composite service to execute the task. However, as
they do not consider service constraints, the alterna-
tive plans might also fail. For example, the best alter-
native plan (for composition 1) based on cost is com-
position 2, whose execution will fail as a result of the
constraints imposed by w
4
. Forward recovery based
approaches (Dolog et al., 2014) look for an alternative
service with the same functionality (input/output) to
repair the plan (e.g. w
4
for w
3
). However, as forward
recovery approaches do not consider the constraints
of alternative services, the recovered plans might fail
again. Current recovery approaches do not consider
service constraints and that could result in a recovered
plan that fails again. They might find an alternative
plan that executes the same services and fail the exe-
cution over and over or they might not even be able to
recover the plan.
Having a constraint-aware composite service
which is aware of its component services constrains
during the execution can help to predict failure and
avoid some wasted executions. For example, if the
composite service execution system is aware of com-
ponent services constraints during the whole execu-
tion process, it could check the shipment service con-
straint right after execution of the search service and
avoid execution of payment service when the product
address is not in the Montreal area. Therefore, the first
issue is to design constraint-aware plans to be able to
verify constraints more effectively to predict failures
inside a composition plan. In addition, when failures
are predicted, a constraint-aware failure recovery ap-
proach needs to be used to complete the task. Such
failure recovery approach starts recovery sooner and
minimizes rollbacks. As a result, the second issue
will be designing a constraint-aware failure recovery
mechanism to use failure prediction and start recovery
as soon as a failure is predicted. Finally, the execution
effects of some services are often uncertain because
of the complex and dynamically changing application
environments in the real world. This can cause differ-
ent results in verification of the following constraints
inside a composite service. Therefore, the third is-
sue is to design an execution method that can ver-
ify constraints at run-time and make proper decisions
for failure recovery. To the best of our knowledge,
there is no constraint-aware failure recovery approach
that can resolve all of the above-mentioned issues in
which we are interested.
Predictive Failure Recovery in Constraint-aware Web Service Composition
215

1.2 Literature Review
A considerable amount of work has been done in the
theoretical modeling and practical implementation of
web services. In this section, first we discuss service
constraints and web service composition. Then, we
review related work on composite service recovery
approaches.
1.2.1 Web Service Composition and Constraints
Web Service composition researches are discussed
into three different categories such as: formal
methods-based approaches (L
´
ecu
´
e and L
´
eger, 2006;
Berardi et al., 2003), AI planning techniques (Oh
et al., 2008; Zheng and Yan, 2008) and graph-search-
based approaches (Hashemian and Mavaddat, 2005;
Wang et al., 2014; Brogi and Corfini, 2007).
Graph-based approaches usually construct a ser-
vice dependency graph to show all possible depen-
dencies based on input and output parameters. In
most graph-based approaches the service dependency
graph is a reflection of the underlying data inter-
face relationships among services. In this context,
AWSC acts like a graph search problem and finds
a path either from provided inputs to required out-
puts or vice-versa. Most graph-based approaches do
not consider service constraints and they model ser-
vices based on input/output parameters. Hashemian
et. al (Hashemian and Mavaddat, 2005) uses a mod-
eling tool to convert the WSC problem into a gen-
eral graph problem. Lang et. al (Liang and Su, 2005)
present an AND/OR graph representation of search
dependency graph and its search algorithm for the dis-
covery of composite services. Wang et. al (Wang
et al., 2014) propose a formal constraint-aware ser-
vice composition method. The proposed solution in-
cludes a graph-search-based algorithm which gener-
ates all possible solutions. It then introduces condi-
tional branch structures into the process model of a
solution to solve the problems brought by service con-
straints, in case different services could accomplish
the same task. However, this approach only considers
the situation where different concrete services can be
used for a sub task in a composition plan and does not
discuss how to verify these constraints.
AI planning is another approach for the AWSC
problem in which, given an initial state and a goal
state, a sequence of actions can be acquired automat-
ically through planning (Rao and Su, 2005). This
approach is done in two stages: a forward expan-
sion stage constructs a search graph and a backward
searching stage retrieves a solution (Li et al., 2016).
Some AI planning approaches (McIlraith and Son,
2002) address the web service composition problem
through the provision of high-level generic proce-
dures and customizing users constraints. Moreover,
there are AI planning-based approaches (Oh et al.,
2007; Oh et al., 2008) using heuristic algorithms to
compute the cost of achieving individual parameters
starting from the inputs, and search to approximate
the optimal sequence of services that properly con-
nect inputs to outputs. In addition, many of the AI
planning approaches support the use of precondition
and effects to describe services (Rao and Su, 2005).
For instance, SWORD (Ponnekanti and Fox, 2002) is
a developer toolkit for building composite web ser-
vices using rule-based plan generation. In SWORD,
a service is modeled by its pre-conditions and post-
conditions and a web service is represented in the
form of a Horn rule that denotes that post-conditions
are achieved if the preconditions are true. However,
looking through many of AI planning approaches, the
pre-conditions express the required input parameters
and effects specify expected services outputs which
could be useful only for reasoning during planning. It
is clear that this representation of pre- condition and
effects cannot express other limitations of services
such as service usage constraints as we discussed ear-
lier.
In addition, service composition can be modeled
as an optimization problem (Aggarwal et al., 2004;
Channa et al., 2005). The optimization approach has
appeared under different names such as QoS-driven or
QoS-aware web service composition and web service
composition optimization (Moghaddam and Davis,
2014). In (Hassine et al., 2006), Hassine et al. pro-
pose a constraint-based approach for the service com-
position problem. It provides a generic formaliza-
tion of the web service composition problem as a
constraint-optimization problem and then constructs
a protocol to solve any composition problem by con-
sidering customer constraints. However, service con-
straints are not addressed in this approach.
1.2.2 Failure Recovery Approaches
The problem of failure recovery in web service com-
position is a problem that was discussed in many re-
search works. This problem is addressed in different
domains including software adaptation (Marconi and
Pistore, 2009; Yan et al., 2010a; Laleh et al., 2014)
and web service composition transactions (Gao et al.,
2011; El Hadad et al., 2010; Dolog et al., 2014; Xu
et al., 2016).
Software adaptation is a complementary domain
that was devoted to the generation of mediators (also
called software adapters, or simply adapters) to solve
mismatch between components or services (Papa-
zoglou et al., 2008; Yan et al., 2010a). Replace-
CLOSER 2017 - 7th International Conference on Cloud Computing and Services Science
216

ment is one of the first adaptation approaches to re-
act to a faulty service (Grigori et al., 2006; Caval-
laro et al., 2009). Replacement is limited to 1-1 sub-
stitution and it focuses on finding a replacement for
a broken service by another one. There are differ-
ent solutions for this, such as finding a service that
can use less input and produce more outputs than the
original one. Replacement is an efficient solution in
terms of computation time, however the limit of re-
placement is that a broken service often cannot be
replaced by another unique service. Re-composition
and repair are two approaches that support 1-n sub-
stitution. Re-composition re-builds the broken ser-
vice by a 1-n substitution. Re-composition could also
go further by using a completely different set of ser-
vices and hence would correspond to an n-m substi-
tution. Repair is also another solution that goes be-
yond the limits of service replacement while avoid-
ing re-composition. This technique aims not only at
keeping most of the above mentioned models as-is
(i.e., not recompute them), but also takes benefit from
them while computing a corrected composition. As
such, repair is a form of heuristic and guided partial
re-composition. In case of 1-1 substitution, repair per-
forms as replacement and is as efficient. In other cases
and for added needs, repair yields better computation
time than re-composition while retrieving solutions of
the same quality (Yan et al., 2010a).
Dynamic transaction support for web services is
another approach to ensure that the composite ser-
vice is executed correctly and achieves the overall de-
sired result (Gao et al., 2011). Transactions are an
approach employed to address system reliability and
fault-tolerance (El Hadad et al., 2010) and the goal
of service composition based on transactional proper-
ties is to ensures a reliable execution of the compos-
ite service. Traditional web services transaction pro-
cessing mechanisms handle exception by forward and
backward recovery approaches (El Hadad et al., 2010;
Dolog et al., 2014). Backward recovery is essentially
a form of rollback that unrolls the transaction and re-
stores the original state of the system. Forward recov-
ery approaches attempt to reach the original goal of
the composite service by retrying or replacing compo-
nents and continuing the process (Meyer et al., 2007;
Yan et al., 2010b). In (Xu et al., 2016) a framework
to optimize the success rate of transactional compos-
ite services is proposed. The framework considers the
success rate of a service to include it as candidate in
the composition process. In this way they improve the
success rate of composite services completing suc-
cessfully and thus reduce the need to employ failure
recovery approaches.
1.3 Our Solution
Figure 2 shows the architecture of our solution includ-
ing two main components: service composition, and
composite service execution. The first component de-
signs the composite services while taking into consid-
eration user constraints and service constraints. The
first step is to find all possible solutions for a compos-
ite service problem. Then, the constraints are adjusted
inside the composite service to enable failure predic-
tion, based on the algorithm we discuss in Section 2.
Finally, a composite service package is assembled to
create a composition including all solutions. The sec-
ond component executes the composite service pack-
age considering the constraints of all individual ser-
vices and recovers from failures.
Figure 2: The architecture of our constraint-aware failure
recovery approach.
2 COMPOSITE SERVICE MODEL
This section discusses our proposed approach for a
constraint-aware composite service. First, we define
basic concepts such as Service and Constraint that
need to be used later in our model.
Definition 1. A Service is defined as a tuple s =<
I, O,C,E,QoS > where:
• I is a set of ontology types representing the input
parameters of the service.
• O is a set of ontology types representing the output
parameters of the service.
• C is a set of constraint expressions representing
limitations on services features.
• E is a set of ontology types representing param-
eters whose value are affected as a result of the
execution of the service.
• QoS is the set of quality parameters of the service.
In our definitions, we used ontology to define con-
cepts (ontology type) and the relations between them.
QoS criteria determine usability and utility of a ser-
vice (Papazoglou, 2008).
Predictive Failure Recovery in Constraint-aware Web Service Composition
217

We also need to define Constraint to specify the
limitations on service features (input/output and QoS)
that must be considered to ensure correct execution of
services. A constraint is a function that maps a ser-
vice feature to a set of values. To express constraints
formally, we use the following definition:
Definition 2. A Constraint Expression is an expres-
sion that can be evaluated to either true or false.
For simplicity, we restrict ourselves to expressions of
the form: < feature >< operator >< literalValue >,
where:
• < f eature > represents a service feature.
• < operator > represents operators such as
=,6=, <,>,≤, ≥,∈, ⊂,⊃,⊆, ⊇.
• < literalValue > represents a value or a set of
values of the same data type as the expression fea-
ture.
For example, C = cost ≥ 10 expresses a constraint
on the cost QoS feature of a service. In addition, there
needs to be a mechanism to evaluate constraint satis-
faction. Therefore, we define Satisfaction Degree as
a mechanism to verify constraints.
Definition 3. If c is a constraint expression and f
is a service feature, Satisfaction Degree (SD(f ,c)) is
a function that calculates a quantitative measure to
evaluate the satisfaction of the value assigned to f
according to c.
For example, if C = cost ≤ 10, for any value as-
signed to cost (cost ← value) :
SD(cost, c) =
(
true value ≤ 10
f alse otherwise
In addition, when there are more than one applicable
constraint, General Satisfaction Degree verifies sat-
isfactions of all constraints.
Definition 4. If C is a set of constraints and f
is a service feature, General Satisfaction Degree
(GSD( f ,C)) is a function that calculates a quantita-
tive measure to evaluate the satisfaction of the value
assigned to f according to all related constraints in
C.
If C is a set of constraints that includes n con-
straints that are applicable to f : GSD( f ,C) =
∏
n
SD( f ,c
i
) In addition, if more than one constraint
targets the same feature in a service, we define inter-
section as a mechanism to find all accepted values for
the service feature according to both constraints.
Definition 5 . If f is a service feature, and
c
1
and c
2
are two constraints on f , intersection
(Intersection(c
1
,c
2
)) is a constraint that expresses all
accepted values for f .
For example, c
1
= payment Method /∈ {Visa}
and c
2
= payment Method ∈ {Visa,MasterCard}
express two constraints on payment Method.
Then Intersection(c
1
,c
2
) = payment Method ∈
{MasterCard}
Now we can define the service composition prob-
lem :
Definition 6. A Service Composition Request R is a
tuple R =< I,O,QoS,C > where:
• I is the set of ontology types representing the input
the customer can provide.
• O is the set of ontology types representing the out-
put expected by the customer.
• QoS is the set of quality parameters expected from
the service by the customer.
• C is the set of constraints representing limitations
of customer-required features.
The result of the service composition algorithm is
the set of all plans that could accomplish the task ex-
pressed by the service composition request. There-
fore, we define plan as:
Definition 7. A Plan is a directed graph in which
each node is a service that has sets of predecessor
and successor services.
The predecessor set represents the set of services
that must be executed directly before the execution of
the service node, and successors represent the set of
services that are going to be executed directly after the
execution of a service node in the plan. For example,
for w
7
in composition 3 (Figure 1), the predecessor
and successor sets are: predecessors(w
7
) = {w
5
,w
6
}
and successors(w
7
) =
/
0.
2.1 Constraint-aware Service
Composition
In this section we discuss our solution to introduce
constraint awareness in composite service. Our ap-
proach aims at modeling composite services such that
their constraints can be verified at runtime to predict
service failures and minimize service rollbacks. The
planning search graph constructs a composition plan
by Algorithm 1, which starts by initiating a list of
temporary plans (tempPlansList) to produce input pa-
rameters (I)(Line 2). Then, it searches into SR (set
of all available services) for services whose input pa-
rameters are available in the input request by the cus-
tomer. This process is repeated and each time new
services are selected form SR to generate new plans
by extending already generated plans (Line 5-8). To
extend a plan using a service, all input parameters of
the service must have been produced by the plan (Line
CLOSER 2017 - 7th International Conference on Cloud Computing and Services Science
218

6). Algorithm 2 adds the new service into the plan. If
the new generated plan could satisfy design-time con-
straints such as the overall cost of the plan, it will be
added to newPlansList (Line 10-11). If a plan pro-
duces the required outputs of the composition prob-
lem (O), it will be added to the list of successful plans
(goalPlansList) (Line 12-16). The algorithm extends
each newly generated plan and this process ends when
the graph reaches a goal in which all parameters in O
are produced or no more services can be added to the
generated plans. If the output parameters cannot be
produced in the search graph, the problem can not be
solved.
Algorithm 1: Service Composition.
Input: R (composition request), SR (set of available
services)
Output: list of plans or failure
1: tempPlansList.Add(initPlan)
2: newPlansList = Null
3: repeat
4: for each plan in tempPlansList do
5: for each service in SR do
6: if (INPUT (service) ⊆
OUT PUT (plan)), and (service not
in plan) then
7: create Plan p
8: p = addService(plan,service)
9: if (CheckConstraints(p, R.C)) then
10: newPlanList.Add(p)
11: if (R.O ⊂ OUT PUT (p)) then
12: p.Add(p
g
)
13: goalPlansList.Add(p)
14: newPlanList.Remove(p)
15: end if
16: end if
17: end if
18: end for
19: end for
20: tempPlansList = newPlansList
21: until (newPlansList 6= Null)
22: return goalPlansList
In our approach, services can be composed in se-
quence or in parallel. AddService (Algorithm 2) de-
cides the order of the service in the newly created
plan by specifying the predecessor services of each
service in the plan. Therefore, for each input parame-
ters of newService, Algorithm 2 searches back to find
the latest service in the plan which produces the in-
put parameter. Then, the service will be added to the
set of predecessor services of newService (Line 4-5).
Besides, the verification points of service constraints
will be moved in the plan as early as possible toward
the beginning of the plan in order to enable better
failure prediction. Finally, Algorithm 2 calculates
Algorithm 2: Add Service.
Input: plan (composition plan), newService (A ser-
vice)
Output: plan (composition plan)
1: I = INPU T (newService)
2: i = NumberO f Service(plan)
3: while I 6=
/
0 do
4: if (OUT PUT (plan.Service(i) ∩
INPUT (newService) 6=
/
0) then
5: newService.predessesor.Add(plan.Service(i))
6: I = I − (OUT PU T (plan.Service(i)) ∩
INPUT (newService))
7: for (each e ∈ (newService.C. f eatures ∩
plan.Service(i).E)) do
8: plan.Service(i).predecessors.constraints.
Add(newService.Constraint(e))
9: end for
10: else
11: break
12: end if
13: i = i − 1
14: end while
15: for (each preService ∈
(newService.predecessors)) do
16: resp = calculateResponse(preService)
17: if (plan.QoS.ResponseTime <
resp + newService.QoS.ResponseTime)
then
18: plan.QoS.ResponseTime =
newService.QoS.ResponseTime + resp
19: end if
20: end for
21: plan.QoS.Cost = s.QoS.Cost + plan.QoS.Cost
22: plan.Add(newService)
23: return plan
the QoS criterion of the plan using the calculation ap-
proach discussed in (Lee et al., 1999; Li et al., 2016).
In this approach, based on the order that concrete ser-
vices are composed, the algorithm calculates the value
of each QoS criterion of the plan.
2.2 Composite Service Package
The result of Algorithm 2 is a set of constraint-aware
composite plans that could satisfy the initial service
request by the user. During execution, the plan with
the best utility function result value is selected. In
Section 2.1, we discussed how our constraint veri-
fication approach aims at minimizing service usage
rollbacks resulting from service failure and recovery.
Predictive Failure Recovery in Constraint-aware Web Service Composition
219

Different recovery approaches that can be used in this
situation. One approach can be replacement in which
the execution system stops executing the failed plan
and uses an alternative plan in the set of composite so-
lutions. However, this solution might result in many
rollbacks being required. Besides, like the situation
discussed in Section 1.1 for executing w
1
and w
2
in
composition 1 and composition 2 , the same services
might be executed and their execution results need to
be rolled back several times. Another solution can be
using forward and backward failure recovery mecha-
nisms to recover constraint-aware plans. However, all
forward and backward recovery approaches (Dolog
et al., 2014; Xu et al., 2016) require to replace, add or
remove new services to the broken plan, while adding
a new service could result in a need to repeat the con-
straint adjustment process discussed in Section 2.1.
As a result, we propose the notion of composite
service package to manage failure recovery in a way
to save waste executions and rollbacks, and does not
impose constraint adjustment every time the compo-
sition plan changes.
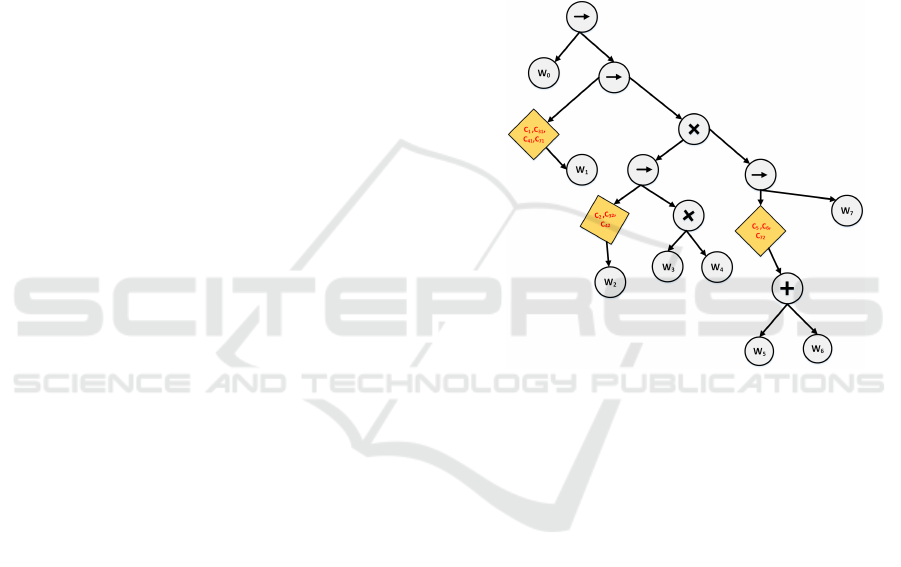
Definition 8. A Composite Service Package is a
constraint-aware composition plan including all pos-
sible plans that can accomplish the same task.
Figure 3 depicts a composition package that in-
cludes all composition plans discussed in Section 1.1.
To create a composition package an algorithm is de-
veloped to integrate all possible composition plans
into a composite package. We use the following oper-
ators discussed in (Hamadi and Benatallah, 2003; Wu
et al., 2016) to describe a service composition work
flow and then make a composition package.
• → : Is an operator representing that the second
service is executed when the execution of the first
service is finished.
• ⊕ : Is an operator representing that the two ser-
vices are executed simultaneously.
• ⊗ : Is an operator representing that one of the two
services is selected to be executed.
First of all we add a service (w
0
) to all the plans to
make all the plans to have the same starting service.
w
0
=< I,O,C,E,QoS > is a service where I =
/
0 and
O = I
SC
where I
SC
is the set of input parameters of
the service composition problem. Now, to combine
all possible composition plans in a composite pack-
age, we start with a plan with the highest utility func-
tion and then gradually add other plans to build the
composition package. During execution of the pack-
age, the plans are going to be executed in this or-
der in the composition package. In Algorithm 3, To
make the composite service package, all plans (like
p = w
1
→ w
2
... → w
n
) need to be converted in a
format as they only have → operator and each w
i
could be a combination of services which can be ex-
ecuted in parallel (⊕) or individual (⊗). For exam-
ple, composition 3 can be depicted as w
1
→ w
V
→ w
7
when w
V
= w
5
⊗ w
6
.
If p
i
and p
j
are two plans such that: p
i
= w
0
→
w
1
... → w
k
→ w
k+1
→ .... → w
x
p
j
= w
0
→ w
1
... →
w
k
→ w
k+1
→ .... → w
y
and we have : V
i
= w
k
→
.... → w
x
,V
j
= w
k
→ .... → w
y
Then, these two plans
are combined in a plan p: p = w
0
→ w
1
... → w
k
→
(V
i
⊗ V
j
) Algorithm 3 gets a set of constraint-aware
plans and creates a composite service package out of
these plans. It starts with considering the first plan
as the composite package. Then, in each step, it adds
a new plan to the composite package. Every time a
plan needs to be added to the composition package,
the intersection of the plan with the composite pack-
age should be found (Line 3-12). Then, based on what
we discussed, the two plans should be combined to-
gether (Line 13-16).
Algorithm 3: Composite Package Creation.
Input: P (set of constraint-aware plans)
Output: pkg plan (composition package)
1: pkg plan = P.getPlan()
2: P = P − pkg plan
3: for (each p ∈ P) do
4: i = 0
5: repeat
6: for (each service ∈ pkg plan.service(i)) do
7: if (service /∈ p.service(i)) then
8: break
9: end if
10: end for
11: i = i + 1
12: until (i ≤ pkg plan.length)
13: l
1
= partialPlan(i + 1, pkg plan.length)
14: l
2
= partialPlan(i + 1, p.length))
15: tempPlan = l
1
⊗ l
2
16: pkg plan = pkg plan.part(i) → tempPlan
17: end for
18: return pkg
plan
3 COMPOSITE SERVICE
PACKAGE EXECUTION
Algorithm 4 proposes a solution to execute a compos-
ite service package. As it is depicted in Figure 3, the
structure of a composite service package is different
from the structure of a simple composite service plan.
In the following, we define the required concepts and
then discuss the composite service package execution
CLOSER 2017 - 7th International Conference on Cloud Computing and Services Science
220
algorithm in detail.
In AI planning for AWSC, a web service alters the
state of the composite service upon execution. When
a composite service is being executed, the state of
the composite service changes step by step by exe-
cution of each component service. The composite
service execution ends when all component services
have been executed and the output of the final service
in the plan is returned as the result of the execution of
the composite service.
Definition 9. A State is the set of all ontology types
representing all features of the component services in
the plan, each of them being initially assigned NULL
values.
We also need to define the way that a service
changes a state value by its execution and in which
condition a service can be applicable to a state.
Definition 10. A service w =< I,O,QoS,C,E > is
applicable to a state S = {< T
1
7→ v
1
> ... < T
n
7→
v
n
>}, (where {T
1
,T
2
,..., T
n
} is a set of ontology types
representing all features in a composition plan, and
{v
1
,...v
n
} are literal values of the same respective
types) denoted as S w, if all constraints of the ser-
vice would be satisfied based on the values assigned
to the features in S.
Additionally, if a service applies to a state, a state
transition function is applied to change the state of the
composite service execution.
Definition 11. When service w is applicable to state S
(S w), a Service Transition Function (γ) is applied
to change the state of service execution to S
0
: S
0
=
γ(S,w).
It should be noted that if all services of a compos-
ite service are composed in sequential order like com-
position 1 in the motivation scenario, the goal state
will be calculated as: G = (γ(γ(γ(S
0
,w
1
),w
2
),w
4
).
However, if services are composed in parallel or-
der (like W
5
and W
6
in composition 3), the goal
state of the composition will be calculated as: G =
(γ(γ(γ(S
0
,w
1
),w
5
)
S
γ(γ(S
0
,w
1
),w
6
),w
7
). Since a
composite service package has a different structure
compared to a regular composite service plan, we pro-
vide a different execution mechanism for it. Figure 3
shows the constraint-aware composite package of the
scenario discussed in Section 1.1. The general idea
behind the composite service package execution is to
execute all plans inside the package one by one. Dur-
ing the execution of each plan, if the verification of a
service constraint fails, the execution system prunes
all plans that are related to the failed constraint. Then
the execution continues with one of the remaining
plans. For example for the composition package of
our discussed scenario (Figure 3), the execution starts
with the first service (w
1
) of composition 1. Before
the execution of w
1
all constraint moved before w
1
,
including C
1
,C
31
,C
41
,C
71
, will be verified. Then, if
the verification of any of them fails, the package will
prune all plans related to the failed constraint. For
example, consider the case where C
31
fails the veri-
fication before execution of w
1
. It means that, based
on the delivery address of the shopped item, the item
cannot be shipped using w
3
. As a result, any plan
that includes w
3
(e.g. composition 1) will be pruned
from the composite service package. This process
will continue until all plans are pruned or at least
one plan successfully completes the execution. Algo-
Figure 3: Composition Service Package with Constraints.
rithm 4 represents the recursive approach that is de-
signed to execute a composite service package. The
execution starts from the root and in each step, based
on the item (services/ operator) in the root, the exe-
cution proceeds. To execute a service (or set of ser-
vices) in the root, the algorithm verifies that the set
of constraints of the service in advance. If the verifi-
cation of all constraints succeeds, it executes the ser-
vices (Lines 1-7). However, if the verification fails,
the composite package should be pruned.
In addition, if there is an operator in the root, the
algorithm should make the right decision to continue
the execution of the plan (Lines 13-28). To do that, it
first starts with computing the left and right sub-trees
of the composition tree. Then, based on the operator
in the root, it continues the execution. For →, first
the left sub-tree should be executed. Then, after it fin-
ished successfully, the right sub-tree will be executed.
⊗ means execution of one of the left or right sub-tree
is enough. Finally, ⊕ means both sub-tree must be
executed in parallel.
Predictive Failure Recovery in Constraint-aware Web Service Composition
221

Algorithm 4: Composite Package Execution.
Input: pkg plan (a composition package), S
0
(initial
state of execution)
Output: either goal state or NULL
1: if (IsService(pkg plan) then
2: if (GSD(s
0
, pkg plan.C)) then
3: StateList[pkg plan] = γ(pkg plan,S
0
)
4: return StateList[pkg plan]
5: else
6: Prune(pkg plan)
7: end if
8: else
9: operator = getOperator(pkg plan)
10: t
1
= Le f t(pkg plan,operator)
11: t
2
= right(pkg plan,operator)
12: if (operator is →) then
13: temp = executionTree(t
1
,S
0
)
14: result = executionTree(t
2
,temp)
15: end if
16: if (operator is ⊗) then
17: result = Null
18: result = executionTree(t
1
,S
0
)
19: if (result is Null) then
20: result = executionTree(t
2
,S
0
)
21: end if
22: end if
23: if (operator is ⊕) then
24: temp1 = executionTree(t
1
,S
0
)
25: temp2 = executionTree(t
2
,S
0
)
26: result = combine(temp1,temp2)
27: end if
28: end if
29: return Null
4 EXPERIMENTAL RESULTS
This section presents experimental results compar-
ing the proposed composite service package execu-
tion approach with other failure recovery approaches
including replacement, re-planning, re-composition
and repair (Section 1.2). First we generated 5 dif-
ferent data sets using the WSC 2009 Testset Gener-
ator (WS-Challenge, 2009). Each data set contains a
WSDL file which is the repository of web services.
An OWL file lists the relationship between concepts
and things. The number of services for each dataset
are around 4000, and the number of concepts varies
from 3000 to 3500 accordingly. In addition, the num-
ber of solutions in each dataset varies from 2 to 4 so-
lutions. Since the generated data using this genera-
tor is not oriented to service composition considering
constraints (C) and effects (E), in the following exper-
iments we augmented the data sets with sets of effects
to different services to meet our experimental needs.
As we discussed in Section 2, E represents set of pa-
rameters whose value are affected as a result of the
execution of the service. Therefore, for each service
we consider the set of output parameters as the set E.
In addition, in each service, for any item in E, a con-
straint is considered. However, instead of generating
a constraint expression and a satisfaction degree for
that, we defined a boolean variable to only consider
the result of satisfaction of the constraint. This vari-
able is initialized to true for all constraints. Then to
simulate a service failure, we change values of all its
constraints to false inside the plan.
To test the effectiveness of our approach we ran-
domly failed services inside composite solutions and
our composite service package. Then, different ap-
proaches were compared to see how many rollbacks
were imposed as a result of the failure recovery. In
re-composition, replacement and repair approaches,
if the plan cannot be recovered, all the services until
the broken point need to be rolled back. Each point
is obtained from the average of 3 independent runs
which in total is 15 different runs.
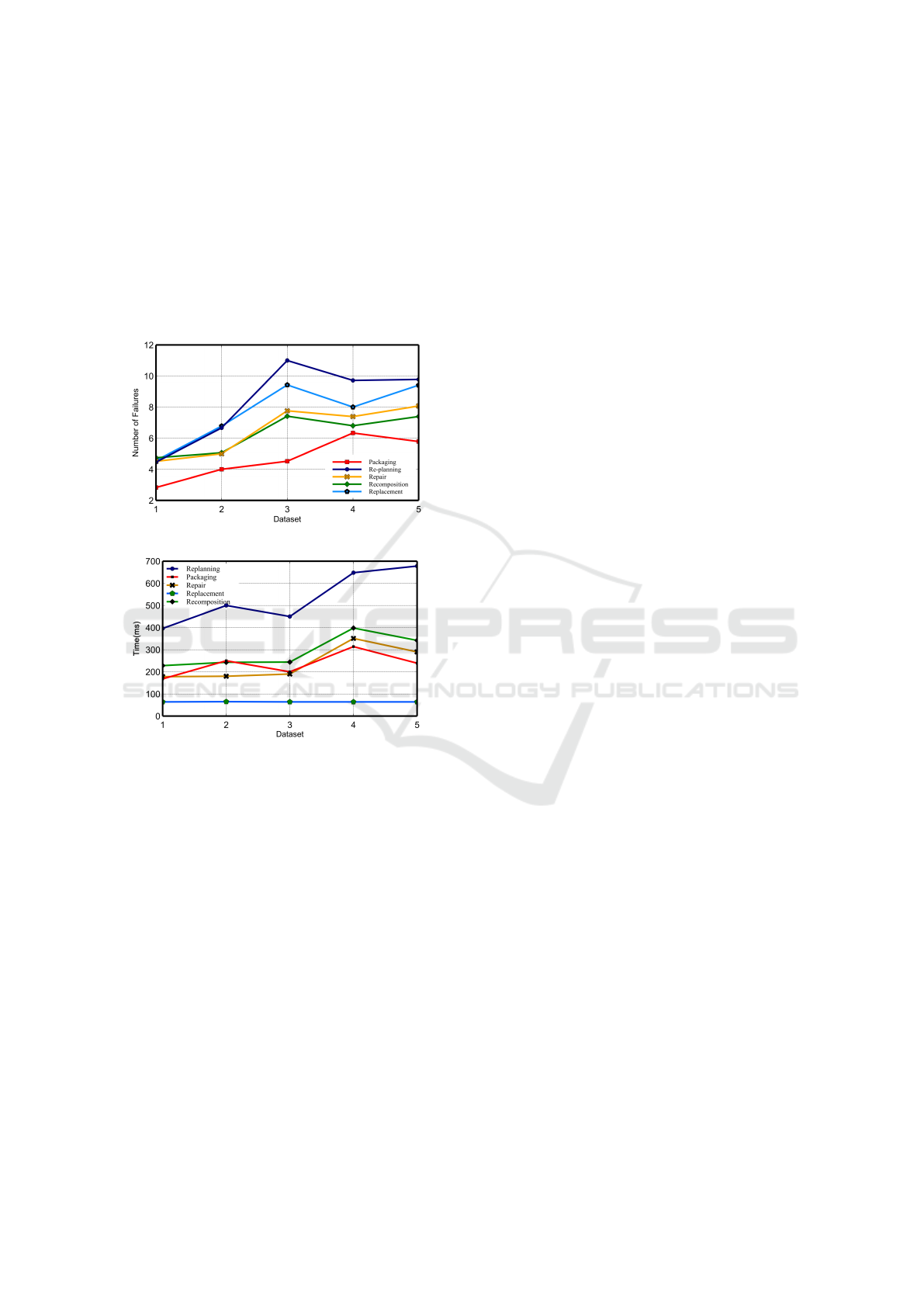
We compare all approaches from two aspects in-
cluding the number of rollbacks (Figure 4) and the
computation time (Figure 5). Figure 4 depicts the re-
sults of our experiments in terms of the number of
rollbacks. It shows that re-planning imposes more
rollbacks than other approaches. The reason is that
every time a failure happens, re-planning needs to de-
sign the plan from the beginning. It is also clear that
our approach imposes the fewest number of rollbacks
compared to other approaches. This is due to the fact
that our solution potentially reuses partially executed
parts that are common between the current failed plan
and its alternative selected after the failure. Our solu-
tion also allows to predict some failures that are going
to happen later and to avoid going forward on a plan
that we know is going to fail, thus saving rollbacks by
predicting failure.
We also compared all approaches based on the
computation time required to proceed with failure re-
covery (Figure 5), i.e. the time that the algorithm re-
quires to do the recovery. Replacement is the fastest
technique as it only requires one comparison with
each available service in the repository. Re-planning
has the worst time as it is the same as running the
composition algorithm from the beginning after ex-
cluding failed services from the repository. In addi-
tion, the performance of our approach is not signifi-
cantly different from repair and re-composition.
We also compared the success rate of the differ-
ent approaches, i.e. the proportion of eventually suc-
CLOSER 2017 - 7th International Conference on Cloud Computing and Services Science
222
cessful execution of a composite service. Among all
approaches, re-planning and composite service pack-
aging have better success rate as, unlike other ap-
proaches, they can step back from the broken point
in the plan and start recovery. However, other ap-
proaches only move the plan forward during failure
recovery. Replacement only looks for a service with
the same same inputs/outputs and concepts. Repair
and re-composition look for a new path to re-build
the composition plan.
Figure 4: Number of rollbacks.
Figure 5: Time performance of different approaches.
5 CONCLUSION AND FUTURE
WORK
In this paper, a constraint-aware failure recovery ap-
proach is proposed to first predict failures inside a
composite service and, upon failure, proceed with re-
covery based on those predictions to reduce the num-
ber of rollbacks. We compared our approach to other
failure recovery approaches from different perspec-
tives. The experimental results demonstrate that our
approach better minimizes the number rollbacks that
are imposed as a result of failure recovery compared
to other approaches. However, it is clear that our ap-
proach has limitations in cases where the number of
possible solutions is potentially very large. We plan to
use genetic algorithms to solve this problem as an op-
timization problem and come up with a local optimal
set of solutions.
REFERENCES
Aggarwal, R., Verma, K., Miller, J., and Milnor, W. (2004).
Constraint driven web service composition in meteor-
s. In Services Computing, 2004. (SCC 2004). Pro-
ceedings. 2004 IEEE International Conference on,
pages 23–30.
Berardi, D., Calvanese, D., De Giacomo, G., Lenzerini,
M., and Mecella, M. (2003). Automatic compo-
sition of e-services that export their behavior. In
Service-Oriented Computing-ICSOC 2003, pages 43–
58. Springer.
Brogi, A. and Corfini, S. (2007). Behaviour-aware discov-
ery of web service compositions. International Jour-
nal of Web Services Research, 4(3):1.
Cavallaro, L., Di Nitto, E., and Pradella, M. (2009). An au-
tomatic approach to enable replacement of conversa-
tional services. In Service-Oriented Computing, pages
159–174. Springer.
Channa, N., Li, S., Shaikh, A. W., and Fu, X. (2005). Con-
straint satisfaction in dynamic web service composi-
tion. In Database and Expert Systems Applications,
2005. Proceedings. Sixteenth International Workshop
on, pages 658–664. IEEE.
Dolog, P., Sch
¨
afer, M., and Nejdl, W. (2014). Design and
management of web service transactions with forward
recovery. In Advanced Web Services, pages 3–27.
Springer.
El Hadad, J., Manouvrier, M., and Rukoz, M. (2010). Tqos:
Transactional and qos-aware selection algorithm for
automatic web service composition. IEEE Transac-
tions on Services Computing, 3(1):73–85.
Gao, L., Urban, S. D., and Ramachandran, J. (2011). A
survey of transactional issues for web service compo-
sition and recovery. International Journal of Web and
Grid Services, 7(4):331–356.
Grigori, D., Corrales, J. C., and Bouzeghoub, M. (2006).
Behavioral matchmaking for service retrieval. In
2006 IEEE International Conference on Web Services
(ICWS’06), pages 145–152. IEEE.
Hamadi, R. and Benatallah, B. (2003). A petri net-based
model for web service composition. In Proceedings
of the 14th Australasian database conference-Volume
17, pages 191–200. Australian Computer Society, Inc.
Hashemian, S. V. and Mavaddat, F. (2005). A graph-based
approach to web services composition. In The 2005
Symposium on Applications and the Internet, pages
183–189.
Hassine, A. B., Matsubara, S., and Ishida, T. (2006). A
constraint-based approach to horizontal web service
composition. In The Semantic Web-ISWC 2006, pages
130–143. Springer.
Laleh, T., Khodadadi, A., Mokhov, S. A., Paquet, J.,
and Yan, Y. (2014). Toward policy-based dynamic
context-aware adaptation architecture for web service
composition. In Proceedings of C3S2E’14, pages
158–163. Short paper.
L
´
ecu
´
e, F. and L
´
eger, A. (2006). A formal model for seman-
tic web service composition. In The Semantic Web-
ISWC 2006, pages 385–398. Springer.
Predictive Failure Recovery in Constraint-aware Web Service Composition
223

Lee, C., Lehoezky, J., Rajkumar, R., and Siewiorek, D.
(1999). On quality of service optimization with dis-
crete qos options. In Proceedings of the Fifth IEEE
Real-Time Technology and Applications Symposium,
pages 276–286.
Li, J., Yan, Y., and Lemire, D. (2016). Full solution index-
ing for top-k web service composition. IEEE Trans-
actions on Services Computing, PP(99):1–1.
Liang, Q. A. and Su, S. Y. (2005). And/or graph and
search algorithm for discovering composite web ser-
vices. International Journal of Web Services Re-
search, 2(4):48.
Marconi, A. and Pistore, M. (2009). Synthesis and compo-
sition of web services. In Bernardo, M., Padovani, L.,
and Zavattaro, G., editors, Formal Methods for Web
Services, volume 5569 of Lecture Notes in Computer
Science, pages 89–157. Springer Berlin Heidelberg.
McIlraith, S. and Son, T. C. (2002). Adapting golog for
composition of semantic web services. KR, 2:482–
493.
Meyer, H., Kuropka, D., and Tr
¨
oger, P. (2007). Asg-
techniques of adaptivity. In Autonomous and Adaptive
Web Services.
Moghaddam, M. and Davis, J. G. (2014). Service selection
in web service composition: A comparative review
of existing approaches. In Web Services Foundations,
pages 321–346. Springer.
Oh, S.-C., Lee, D., and Kumara, S. R. (2008). Effective web
service composition in diverse and large-scale service
networks. Services Computing, IEEE Transactions
on, 1(1):15–32.
Oh, S.-C., Lee, D., and Kumara, S. R. T. (2007). Web ser-
vice planner (wspr): An effective and scalable web
service composition algorithm. Int. J. Web Service
Res., 4(1):1–22.
Papazoglou, M. (2008). Web services: principles and tech-
nology. Pearson Education.
Papazoglou, M. P., Traverso, P., Dustdar, S., and Leymann,
F. (2008). Service-oriented computing: a research
roadmap. International Journal of Cooperative Infor-
mation Systems, 17(02):223–255.
Ponnekanti, S. R. and Fox, A. (2002). Sword: A developer
toolkit for web service composition. In Proc. of the
Eleventh International World Wide Web Conference,
Honolulu, HI, volume 45.
Rao, J. and Su, X. (2005). A survey of automated web ser-
vice composition methods. In Cardoso, J. and Sheth,
A., editors, Semantic Web Services and Web Process
Composition, volume 3387 of Lecture Notes in Com-
puter Science, pages 43–54. Springer Berlin Heidel-
berg.
Wang, P., Ding, Z., Jiang, C., and Zhou, M. (2014).
Constraint-aware approach to web service composi-
tion. IEEE Transactions on Systems, Man, and Cy-
bernetics: Systems, 44(6):770–784.
Wang, P., Ding, Z., Jiang, C., Zhou, M., and Zheng, Y.
(2015). Automatic web service composition based on
uncertainty execution effects.
WS-Challenge (2009). Testsetgenera-
tor2009. https://code.google.com/p/wsc-pku-
tcs/downloads/list.
Wu, Q., Ishikawa, F., Zhu, Q., and Shin, D. H. (2016). Qos-
aware multigranularity service composition: Model-
ing and optimization. IEEE Transactions on Systems,
Man, and Cybernetics: Systems, PP(99):1–13.
Xu, J., Li, Z., Chi, H., Wang, M., Guan, C., Reiff-
Marganiec, S., and Shen, H. (2016). Optimized com-
posite service transactions through execution results
prediction. In Web Services (ICWS), 2016 IEEE Inter-
national Conference on, pages 690–693. IEEE.
Yan, Y., Poizat, P., and Zhao, L. (2010a). Repair vs. recom-
position for broken service compositions. In Service-
Oriented Computing, pages 152–166. Springer.
Yan, Y., Poizat, P., and Zhao, L. (2010b). Repairing ser-
vice compositions in a changing world. In Lee, R.,
Ormandjieva, O., Abran, A., and Constantinides, C.,
editors, Proceedings of SERA 2010 (selected papers),
volume 296 of Studies in Computational Intelligence,
pages 17–36. Springer Berlin Heidelberg.
Zheng, X. and Yan, Y. (2008). An efficient syntactic web
service composition algorithm based on the planning
graph model. In Proceedings of the IEEE Interna-
tional Conference on Web Services (ICWS’08), pages
691–699. IEEE.
CLOSER 2017 - 7th International Conference on Cloud Computing and Services Science
224
