
Advancements of Methods for Fast and Accurate Estimation of
Human Body Segment Parameter Values
Pelin Cizgin
1
, Philipp Kornfeind
2
, Michaela Haßmann
2
and Arnold Baca
2
1
Institute of Molecular Biotechnology, Vienna, Austria
2
Department of Biomechanics/Kinesiology and Computer Science in Sport, University of Vienna, Vienna, Austria
Keywords: Geometric Models, Anthropometry, Inverse Dynamics, Human Motion Analysis.
Abstract: In order to assess joint loads and to estimate joint reaction forces and net joint torques in human motion
analysis, inverse dynamic approaches are commonly applied. These approaches rely on an accurate estimation
of human body segment parameter values. The paper gives an overview of contemporary methods with a
specific focus on approaches based on geometrical models, where image based or photogrammetric
techniques are applied for estimating the parameter values fast and accurately.
1 INTRODUCTION
For the understanding of the cause of any movement
the knowledge of patterns of forces acting on and
within the human body is required. In general, forces
are calculated indirectly using kinematic, kinetic and
anthropometric data. A full kinematic description,
accurate anthropometric measures, and external
forces, are used to calculate joint reaction forces and
net joint torques. This prediction is called an inverse
solution and is a very powerful tool in motion analysis
(Winter, 2005). Accurate estimations of human body
segment parameter values (BSPs) are required to
obtain accurate inverse solutions. These parameters
comprise volume, mass, location of center of mass,
principal moments of inertia and location of the
principal axes of inertia. Studies (for example, Rao
(2006)) have shown the sensitivity of inverse
dynamic solutions to BSP.
2 AN OVERVIEW OF METHODS
Different approaches have been followed in order to
determine human body segment parameter values. In
the sequel, we will differentiate between statistical
methods, methods based on medical imaging
technologies, such as computerized-tomography
(CT) or magnetic resonance imaging (MRI), methods
based on geometrical models and dynamic parameter
estimation methods.
2.1 Statistical Methods
Popular sources for BSP information are regression
equations generated from human cadaver data
(Dempster, 1955); (Clauser et al., 1969); (Drillis and
Contini, 1966), which incorporate whole body and/or
segment anthropometric measurements to predict
BSPs. These equations provide quick and easy
methods for human BSPs estimation, but have been
criticized in several ways. An obvious problem of
cadaver-based prediction is that they typically are
based on data from a limited number of elderly
cadavers, which may result in limited accuracy (cf.
Nigg and Herzog (1999)). Erdmann and Kowalczyk
(2015) propose a method for estimating volume, mass
and location of center of mass of body segments
based on regression equations developed by Erdmann
(1997) using data from CT scans and Clauser et al.,
(1969). They put particular attention to the trunk,
which is, according to Erdmann’s (1997) method
divided into subparts consisting of tissues of different
density.
2.2 Methods based on Medical Imaging
Technologies
Living-based, predictive models for BSP estimation
involve the use of gamma ray scanning (Zatsiorsky,
et al., 1990), CT (Ackland et al., 1988), MRI (Cheng
et al., 2000), dual energy X-ray (Durkin et al., 2002),
and combinations of methods. The approach of
Cizgin P., Kornfeind P., Haçmann M. and Baca A.
Advancements of Methods for Fast and Accurate Estimation of Human Body Segment Parameter Values.
DOI: 10.5220/0006439400690074
In Proceedings of the 5th International Congress on Sport Sciences Research and Technology Support (icSPORTS 2017), pages 69-74
ISBN: 978-989-758-269-1
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
Durkin et al., (2002), for example, makes use of two
X-ray intensities in order to determine bone material
and soft tissue masses separately. Even though all
these methods provide accurate BSPs estimations on
living subjects, especially CT imaging and gamma-
mass scanning, as well as X-ray methods underlie
criticism because of the high costs and the radiation
which the subjects are exposed to (cf. (Rossi et al.,
2013).
2.3 Methods based on Geometrical
Models
Geometrical models are based on geometric figure
templates for segments. The exact shapes are defined
by a certain number of anthropometric measurements.
A popular model is that proposed by Hanavan (1964).
25 anthropometric dimensions are required for
defining the shapes of all body segments. Another
well-known and, to our knowledge, most accurate
mathematical model for the computational estimation
of BSP is the one published by Hatze (1979; 1980).
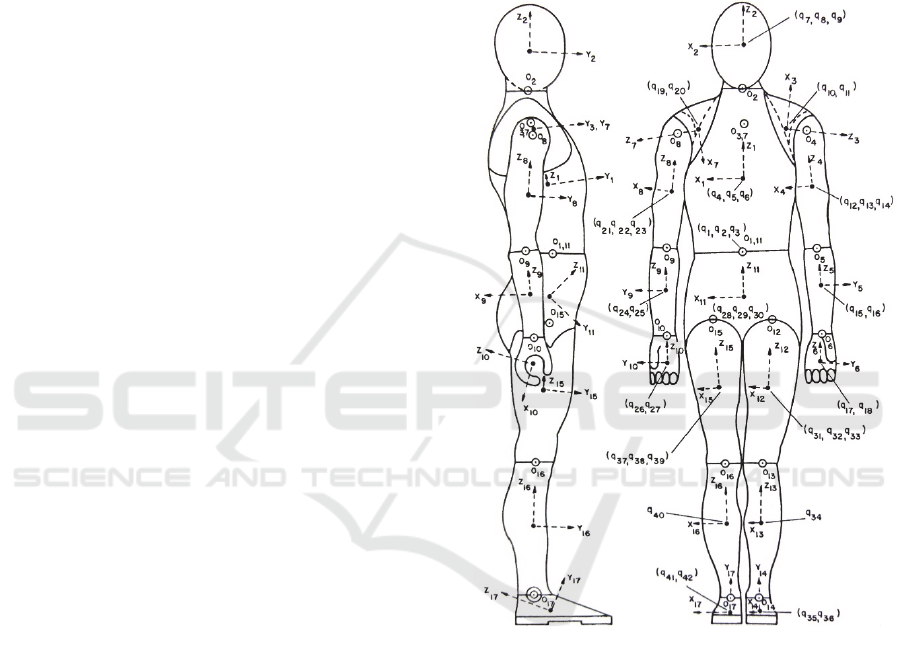
The model (“hominoid”) is based on 242
anthropometric input values. Hatze’s model
combines a volume and density function to estimate
segment inertial parameters. Segments are sectioned
into more than one shape, from which the volume can
be estimated, to get more detail in contours of a body
segment. In addition, this is coupled with a non-
uniform density function. The hominoid model (see
Fig.1) accounts for exomorphic and tissue density
differences between males and females, segmental
shape fluctuations and asymmetries in geometries of
segments. There is, however, a high expenditure for
the manual determination of the required input
values. The direct measurement of the 242
anthropometric dimensions takes about 60-80
minutes.
2.4 Dynamic Parameter Estimation
Methods
Methods of that kind are characterized by parameter
fitting approaches based on kinematics and measured
external forces.
We are aware of three notable developments,
which have been published recently. Díaz-Rodríguez
et al., (2016) apply a robotics formalism. They first
estimate mass and center of gravity from a static
model and include the results in a dynamic model in
order to estimate the moment of inertia. Bonnet et al.,
(2016) identify the mass, center of gravity and
moments of inertia over a number of static and
dynamic postures using optimal exciting motions.
Son et al., (2014) suggest a method based on the
dynamic equation of motion. They perform
consecutive steps using a commercial dynamometer.
First, a quasi-static passive movement is executed,
next a fast movement of the segment under
investigation with and without addition of an
attachment and finally of just the attachment. In both
studies, however, inertial parameters have only been
determined for selected segments.
Figure 1: Hominoid. Adapted from (Hatze, 1983).
3 TOWARDS FAST
AVAILABILITY OF SEGMENT
PARAMETER VALUES
There is little debate that a geometric model with a
non-uniform density function provides a very
accurate BSP estimation. However, especially for
clinical analyses of gait and posture non-invasive,
safe, cost-effective and, in particular, rapid methods
are from high importance in addition to providing
accurate parameter values.
Image based or photogrammetric approaches
provide means for capturing shape related data and
the required geometric outlines without much effort.
Clarkson et al., (2012) introduced a method based on
a Microsoft Kinect based sensor system, whereas
Peyer et al., (2015); Sheets et al., (2010) as well as Lu
and Wang (2008) applied 3D body scanners.
Figure 2: Video image for determination of anthropometric
dimensions of hominoid model (cf. (Baca, 1996)).
3.1 A Video-based Approach for the
Hominoid
In 1996, Baca introduced a method for determining
the anthropometric data required for Hatze’s
hominoid (Baca, 1996). This method is accurate, but
still somewhat time consuming, because several
images from different planes have to be recorded. An
example of one of the four recordings required is
given in Fig. 2.
3.2 Application of 3D Scanners
The development of 3D scanners in the past decade
has attracted several fields of science. Automated
whole body scanner technology merged on the market
offering the possibility of obtaining three-dimen-
sional coordinates of measuring points on the surface
of the object of interest fast, accurate and reliable.
By combining scanner based measurements and
accurate mathematical segment models considering
non-uniform density distributions both fast and
accurate estimation of body segment parameters may
be provided. The applicability of three-dimensional
body scanning technology (Vitus Smart XXL,
Vitronic, Wiesbaden, Germany) for determining
automated or semi-automated individual
anthropometric dimensions of Hatze’s hominoid in
order to determine subject specific body segment
parameter values has therefore been investigated in
the working group of the last author of this paper. The
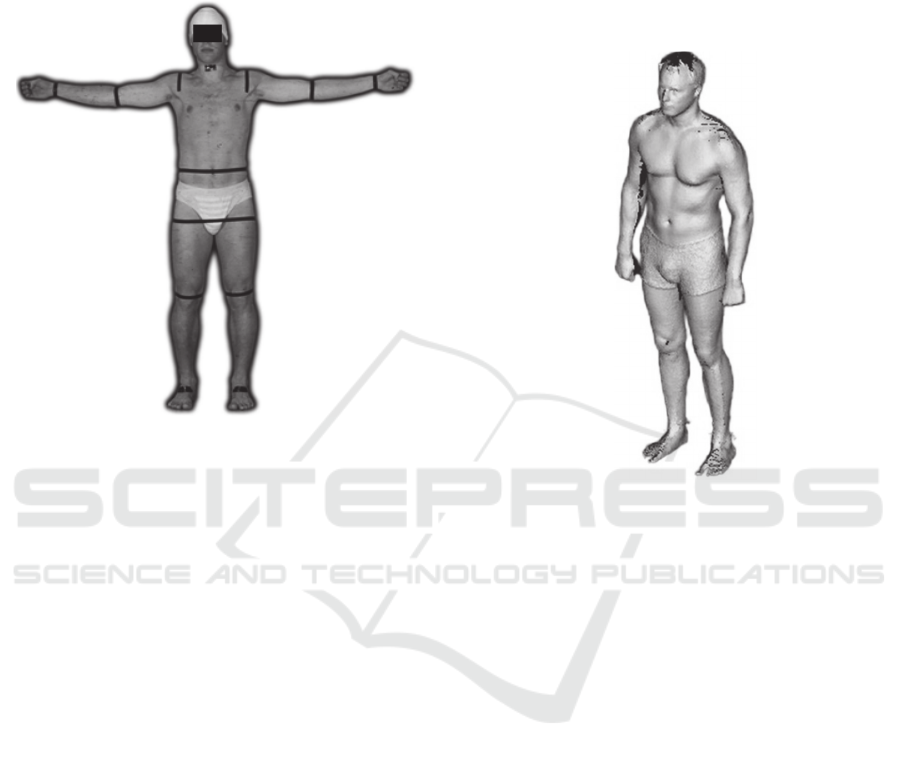
3D body scanner used allows capturing full body
scans with an accuracy of ± 1 mm. An example of a
3D-scan is shown in Fig. 3.
Figure 3: 3D-scan from Vitus Smart XXL 3D body scanner.
3.2.1 Automated Segmentation
The master thesis of Schiffl (2011) investigated the
utility of the 3D scanner for the automatic
segmentation of scan data into the 17 segments of
Hatze’s anthropomorphic model. Comparatively
large differences were observed for the segment
lengths and volumes (e..g. more than 20 % for the
volume of the abdomino-thoracic segment) when
determined as well manually as by applying the
automated method.
3.2.2 A Semi-automated Approach
In order to overcome this problem, a semi-automated
approach was followed in the master thesis of Cizgin
(2013). The overall procedure for estimating all
segment parameter values, which in total takes about
10-12 minutes, is as follows: First, the subject is
prepared (clothing, bathing cap, 5 markers). Then, the
subject is scanned in two different body postures.
Whole body scans captured by Vitus Smart XXL,
Vitronic 3D Body Scanner provide surface images as
point clouds into the ScanWorX Software Solution
(Kaiserslautern, Germany). The measurement
module AnthroScan detects nearly all necessary
landmark points relevant to Hatze’s geometrical
model automatically. The five landmarks which
cannot be recognized accurately by the software
(right jaw joint, most protruding point of left and right
scapula, left and right hip joint center) have to be
localized physically on the subject and marked with
small circular markers before the scanning process.
Once the surface image is visible as a 3D point cloud
in the application, the user can position the relevant
landmarks on the screen precisely guided through
step by step introduction. Finally, the measurements,
which should be performed disregarding
subcutaneous fat in abdominal-pelvic section must be
performed by direct measuring method. Because of
this combination of automated calculation and user
based positioning of icons, this approach is
considered as a semi-automated determination.
Furthermore, the application does not require any
surface mesh procedures. The captured surface cloud
point image is in sufficient detail and almost gap free
reconstructed. By extending the implementation of
the application, all Hatze relevant 242 subject specific
anthropometric measurements can be automatically
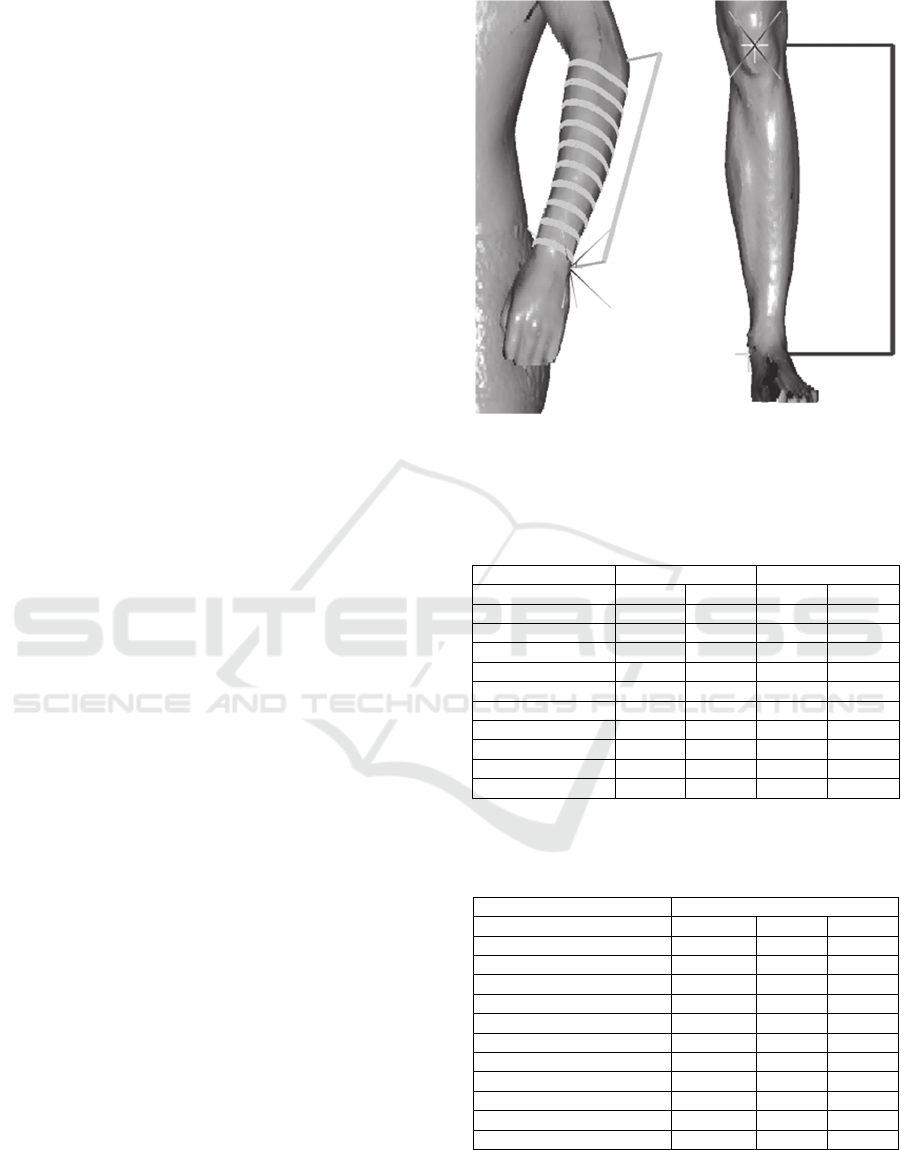
determined. Fig. 4 shown as an example represents
the visualization of the virtual tape for taking the
perimeters and length measures of the underarm and
leg within the 3D scan image.
Mean absolute and/or relative differences (6
subjects) between the manual and the semi-automated
approach for determining parameter values of
selected segments are presented in Tab. 1. and Tab. 2.
Both, negative and positive differences were found
when comparing approaches. Deviations of more than
10 % were only observed in principal moments of
inertia of small segments, which typically have
limited influence on the result of analyses of whole-
body motions.
The semi-automatic approach has shown to be
suited for estimating human segment parameter
values fast and accurate. The overall duration for one
subject is about 12 to 15 minutes, whereas 60 to 80
minutes were required for the procedure based on
manual measurements. A general drawback of
methods based on the particular 3D scanner used lies
in the comparatively high costs of the scanning
device. It should, however, be possible substituting
this specific instrument by scanners demanding lower
costs (for example as described in Peyer et al., (2015),
given that a similar scan resolution may be obtained.
Figure 4: Virtual tape for taking perimeters and length
measures.
Table 1: Mean relative and absolute differences (n=6)
between length and mass obtained using manual
measurement and semi-automated approach.
length mass
segment [%] [mm] [%] [kg]
abdomino-thoracic 1,2 5,7 4,7 0,751
head neck 1,0 2,2 1,8 0,105
left shoulder 2,5 3,0 6,4 0,059
left (upper) arm 2,2 6,0 4,1 0,081
left forearm 2,4 6,3 4,2 0,054
left hand 2,6 2,2 7,6 0,023
abdomino-pelvic 1,9 4,8 2,1 0,302
left thigh 2,5 7,7 2,3 0,173
left leg 1,4 5,8 2,2 0,076
left foot 2,1 4,7 5,6 0,042
Table 2: Mean relative differences (n=6) between principal
moments of inertia obtained using manual measurement
and semi-automated approach.
principal moments of inertia
x y z
segment [%] [%] [%]
abdomino-thoracic 7,3 7,6 5,9
head neck 3,7 2,9 3,1
left shoulder 6,1 18,1 10,3
left (upper) arm 8,8 9,1 5,1
left forearm 7,2 7,1 7,9
left hand 10,8 21,0 17,7
abdomino-pelvic 7,3 4,1 6,9
left thigh 4,0 3,8 4,6
left leg 4,6 4,8 3,7
left foot 3,5 3,3 11,3

4 CONCLUSION
Geometric segment models combined with a non-
uniform density function enable a very accurate BSP
estimation. If anthropometric dimensions defining the
shapes of these models are determined using three-
dimensional body scanning technology, the overall
parameter estimation process can be performed in
some minutes. The semi-automated approach as
described decreases time for data collection, whilst
maintaining body segment accuracy when compared
to the manual method.
REFERENCES
Ackland, T., Henson, P., Bailey, D., 1988. The uniform
density assumption: Its effect upon the estimation of
body segment inertial parameters. International
Journal of Sports Biomechanics, 4, 146-155.
Baca, A., 1996. Precise determination of anthropometric
dimensions by means of image processing methods for
estimating human body segment parameter values.
Journal of Biomechanics, 29(4), 563-567.
Cheng, C.-K., Chen, H.-H., Chen, C.-S., Lee, C.-L., Chen,
C.-Y, 2000. Segment inertial properties of Chinese
adults determined from magnetic resonance imaging.
Clinical Biomechanics, 15(8), 559-566.
Cizgin, P., 2013. Automatisierte Bestimmung
anthropometrischer Segmentparameter des
Hominoidmodells von Hatze mittels 3D-
Laserscantechnologie. Master thesis, Medical
University Vienna, 2013.
Clarkson, S., Choppin, S., Hart, J., Heller, B., Wheat, J.,
2012. Calculating body segment inertia parameters
from a single rapid scan using the Microsoft Kinect. In
Proc 3
rd
International Conference on 3D Body
Scanning Technologies, Lugano, Switzerland, 16.-17
October 2012.
Clauser, C. E., McConville, J. T., Young, J. W., 1969.
Weight, volume and center of mass of segments of the
human body. AMRL Technical. Report, Wright-
Patterson Air Force Base, Ohio.
Crosnier, P., Gautier, M., Gonzáles, A., Venture, G., 2016.
Optimal Exciting Dance for Identifying Inertial
Parameters of an Anthropomorphic Structure. IEEE
Transactions on Robotics, 32(4), 823-836.
Dempster, W.T., 1955. Space requirements for the seated
operator. Wright Air Development Center. Wright-
Patterson Air Force Base, Dayton, OH, WADC Tech.
Rep. TR-55-159.
Díaz-Rodríguez, M., Valera, A., Page, A., Besa, A., Mata,
V., 2016. Dynamic Parameter Identification of Subject-
Specific Body Segment Parameters Using Robotics
Formalism: Case Study Head Complex. ASME.
Journal of Biomechanical Engineering,
138(5):051009-051009-8.doi:10.1115/1.4032997.
Drillis, R., Contini, R., 1966. Body Segment Parameters.
New York, New York: Office of Vocational
Rehabilitation, Report No.: No. 1166-03.
Durkin, J. L., Dowling, J. J., Andrews D. M., 2002. The
measurement of body segment inertial parameters using
dual energy X-ray absorptiometry. Journal of
Biomechanics, 35(12), 1575-1580.
Erdmann, W. S., 1997. Geometric and inertial data of the
trunk in adult males. Journal of Biomechanics, 30(7),
679-688.
Erdmann, W. S., Kowalczyk, R., 2015. A personalized
method for estimating centre of mass location of the
whole body based on differentiation of tissues of a
multi-divided trunk. Journal of Biomechanics, 48(1),
65-72.
Hanavan, Jr., E. P., 1964. A mathematical model of the
human body (No. AFIT-GA-PHYS-64-3). Air Force
Aerospace Medical Research Lab Wright-Patterson
Afb Oh.
Hatze, H., 1979. A model for the computational
determination of parameter values of anthropomorphic
segments. CSIR Techn. Report TWISK 79, Pretoria.
Hatze, H., 1980. A mathematical model for the
computational determination of parameter values of
anthropomorphic segments. Journal of Biomechanics,
13 (10), 833-843.
Hatze, H., 1983. Computerized optimization of sports
motions: an overview of possibilities, methods and
recent developments. Journal of Sports Science, 1, 3-
12.
Lu, J.-M., Wang, M.-J. J., 2008. Automated anthropometric
data collection using 3D whole body scanners, Expert
Systems with Applications, 35, 407-414.
Nigg, B. M., Herzog, W. (Eds.), 1999. Biomechanics of the
muskulo-skeletal system. 2nd Edition. Chichester: John
Wiley & Sons.
Peyer, K. E., Morris, M., Sellers, W. I., 2015. Subject-
specific body segment parameter estimation using 3D
photogrammetry with multiple cameras,
PeerJ:e381,DOI 10.7717/peerj.831.
Rao, G., Amarantini, D., Berton, E., Favier, D., 2006.
Influence of body segments’ parameters estimation
models on inverse dynamics solutions during gait,
Journal of Biomechanics, 39 (8), 1531-1536.
Rossi, M., Lyttle, A., El-Sallam, A., Benjanuvatra, N.,
Blanksby, B., 2013. Body segment inertial parameters
of elite swimmers using DXA and indirect methods.
Journal of Sports Science and Medicine, 12(4), 761-
775.
Schiffl, K., 2011. Bestimmung von Hominoidsegmenten aus
3D-Bodyscannerdaten. Master thesis, Technical
University Vienna, 2011.
Sheets, A.L., Corazza, S., Andriacchi, T. P., 2010. An
automated image-based method of 3D subject-specific
body segment parameter estimation for kinetic analyses
of rapid movements. Journal of Biomechanical
Engineering, 132 (1), 011004.
Son, J., Ryu, J., Kim, J., Kim, Y., 2014. Determination of
inertial parameters using a dynamometer. Bio-Medical
Materials and Engineering 24, 2447-2455.

Winter, D., 2005. Biomechanics and motor control of
human movement. New Jersey: John Wiley & Sons Inc.
Zatsiorsky, V., Seluyanov, V., Chugunova, L., 1990. In
vivo body segment inertial parameter determination
using a gamma-scanner method. In Biomechanics of
Human Movement: Applications in Rehabilitation,
Sports and Ergonomics. Eds: Berme, N. and Cappozzo,
A. Bertec, Ohio. 186-202.
