
Computing Path Bundles in Bipartite Networks
Victor Parque
1,2
, Satoshi Miura
1
and Tomoyuki Miyashita
1
1
Dept. of Modern Mechanical Engineering, Waseda University, 3-4-1 Okubo, Shinjuku-ku, Tokyo, Japan
2
Dept. of Mechatronics and Robotics, Egypt-Japan University of Science and Technology, Borg Al Arab, Alexandria, Egypt
Keywords:
Path Bundling, Optimization, Bipartite Networks.
Abstract:
Path bundling, a class of path planning problem, consists of compounding multiple routes to minimize a
global distance metric. Naturally, a tree-like structure is obtained as a result wherein roots play the role of
coordinating the joint transport of information, goods, and people. In this paper we tackle the path bundling
problem in bipartite networks by using gradient-free optimization and a convex representation. Then, by using
7,500 computational experiments in diverse scenarios with and without obstacles, implying 7.5 billion shortest
path computations, show the feasibility and efficiency of the mesh adaptive search.
1 INTRODUCTION
Path bundling is the problem which consists on com-
pounding multiple paths and finding anchoring points
at intermediate joints in order to minimize a global
distance metric. Naturally, by using coordinate nodes,
the aim of computing path bundles is to coordinate the
transport and communication of goods, information
and people. Path bundling is mainly relevant in sce-
narios where (1) the resources for transport are scarce,
and (2) the environment is hard to navigate due to nar-
row space or limited navigability. Thus it becomes
necessary to join single paths into compounded ones
to ensure efficient transport/communication. For ex-
ample consider the optimization of a the location of
coordinating nodes in a ZigBee network (and its IoT
applications), or consider the problem of building op-
timal wire harness of the electrical system of a ve-
hicle (or any complex mechanical system), or con-
sider the decentralized communication of multiagent
robotic systems over a large area (where the location
of the coordinating agents is to be optimized for effi-
cient communication).
Research on path bundling has its origins in the
well-known developments of the shortest-path prob-
lem: how to search for the shortest route path over
polygonal domains? (Dijkstra, 1959; P.E. Hart, 1968;
Kallmann, 2005). Here, the main goal is to find the
most optimal path between single origin-destination
pairs; and the widely-known algorithms are Dijsktra
(Dijkstra, 1959) and A* (P.E. Hart, 1968), and their
extensions are well-studied.
In practical domains, yet with a different scope,
the research of path bundling has attracted the atten-
tion of the following fields: optimization of sensor
and wireless networks (Falud, 2014; Wightman and
Labardor, 2011; Torkestani, 2013; Panigrahi and Khi-
lar, 2015; Szurley et al., 2015; Singh and Sharma,
2015; Parque et al., 2015), and network visualiza-
tion (Cui et al., 2008; Selassie et al., 2011; Ersoy
et al., 2011; Gansner et al., 2011; Holten and van
Wijk, 2009; R. Osada and Dobki, 2002; Parque et al.,
2014b). The closest developments to path bundling
regard the edge bundling problem in network visu-
alization. Here, the conventional works have fo-
cused on the geometry-based clustering of edges(Cui
et al., 2008; Parque et al., 2014b), the force-based
edge bundling where edges are able to attract to each
other(Cui et al., 2008; Selassie et al., 2011), the clus-
tering and attraction to the skeleton of adjacent edges
(Ersoy et al., 2011), and the kd-tree based optimiza-
tion of the centroid points of close edges(Gansner
et al., 2011). The above solutions for route bundling
render compounded networks which are aesthetically
pleasing, topologically compact and locally optimal.
However, the study of route bundling under global op-
timization, in the sense of minimizing a global dis-
tance metric, has been elusive.
In this paper, in order to fill the above gap, we fur-
ther advance our previous work(Parque et al., 2017)
by designing globally optimal path bundles through
sample-based global optimization algorithms over a
convex representation of polygonal domains and bi-
partite networks. The unique point of our approach
422
Parque, V., Miura, S. and Miyashita, T.
Computing Path Bundles in Bipartite Networks.
DOI: 10.5220/0006480604220427
In Proceedings of the 7th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2017), pages 422-427
ISBN: 978-989-758-265-3
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Figure 1: Basic idea of path bundling. Given a polygo-
nal map and edges representing desirable origin-destination
pairs, the goal is to find optimal anchoring points minimiz-
ing the global distance metric of the bundled path.
is to explicitly avoid the computations of point in-
side polygons while sampling for globally optimal
path bundles in both convex and non-convex polyg-
onal domains. Computational experiments in scenar-
ios with a relevant set of polygonal domains and rel-
evant global optimization algorithms show the feasi-
bility and efficiency of our approach.
2 COMPUTING PATH BUNDLES
2.1 Basic Idea
The basic concept of path bundling is depicted
by Fig. 1 wherein the output is a tree structure
with compounded paths avoiding obstacle collision,
wherein roots of the tree denote coordinating points
to their leaves. A-priori knowledge of the follow-
ing is necessary: (1) a bipartite graph G = (V, E)
wherein every edge e ∈E represents the communica-
tion/transportation needs between origin-destination
pairs, and (2) obstacle geometry which denote unfea-
sible areas for navigation/transportation.
2.2 Representation of Bundled Paths
In our approach, any feasible point is represented by
the 3-element tuple:
P = (i, r
1
, r
2
) (1)
where i ∈ [n] and r
1
, r
2
∈ [0, 1]. In the above en-
coding, i is the index of i-th triangle t
i
∈T of the trian-
gulation of the free-space, and r
1
, r
2
are real numbers
in the interval [0, 1]. The unique feature of the above
convex representation lies in the ability to encode ar-
bitrary points which guarantee to be inside the navi-
gable space by using the tuple (i, r
1
, r
2
) for i ∈ [n], for
P ∈N
[n]
×R
[0,1]
×R
[0,1]
. Furthermore, the equivalent
2-dimensional cartesian coordinates can be computed
as follows (R. Osada and Dobki, 2002):
(P
x
, P
y
) = (1 −r
1
)A
i
+
√
r
1
(1 −r
2
)B
i
+
√
r
1
r
2
C
i
(2)
where A
i
, B
i
, C
i
are the 2-dimensional coordinates
of the vertices of the i-th triangle t
i
∈ T . Then, by
using the encoding in Eq. 1, the bundled path can be
represented by the 6-element tuple:
x = (i
P
, r
P
1
, r
P
2
, i
Q
, r
Q
1
, r
Q
2
) (3)
where i
P
, i
Q
are natural numbers in the interval [n],
and r
P
1
, r
P
2
, r
Q
1
, r
Q
2
∈ [0, 1]. For simplicity and without
loss of generality, we denote the search space x ∈T:
T = N
[n]
×R
[0,1]
×R
[0,1]
×N
[n]
×R
[0,1]
×R
[0,1]
(4)
2.3 Optimization Problem
We solve the following equation:
Minimize
x
F(x)
subject to x ∈ T
(5)
where, x is the encoding (representation) of the
bundled path, F(x) is the global distance metric to
evaluate the quality of the bundled paths, and T is the
search space of feasible bundled paths. The main ra-
tionale of the above is as follows: once the search
space x ∈ T is constructed by the procedures de-
scribed in the previous subsection, our goal is to find
anchoring points P and Q which minimize a distance
metric. For simplicity, we use the following function:
F(x) =
∑
e∈E
d(e
o
, P) + d(P, Q) +
∑
e∈E
d(Q, e
d
) (6)
where, d(a, b) is the Euclidean obstacle-free
shortest distance metric between points a and b, e
o
(e
d
) is the coordinate of the origin (destination) node
of the edge e ∈ E, and P and Q are anchoring points
being closer to the origin e
o
and destination e
d
, re-
spectively. The 2-dimensional coordinates of P and Q
can be computed by combining Eq. (1)-(3). Solving
Eq. 5 is realized by:
• DE: Differential Evolution with Successful Parent
Selection/Best1(S-M Guo, 2015).
• NPSO: Particle Swarm Optimization with Nich-
ing Properties(B. Y. Qu and Suganthan, 2012).
• RBDE, Real-Binary Differential Evolution
(RBDE)(Sutton et al., 2007).
• SHADE, Success History Parameter Adaptation
for Differential Evolution(R. Tanabe, 2013).
Computing Path Bundles in Bipartite Networks
423

• DIRECT, Direct Global Optimization Algo-
rithm(Jones, 1999).
The main reason/motivation of using the above
algorithmic set is to rigorously tackle path bundling
problem by using a representative class of gradient-
free optimization algorithms. The above algorithms
are relevant in the literature due to the fact of con-
sidering multimodality, parameter adaptation, search
memory, selection pressure, search over neighbour-
hood concepts, and mesh partitioning. Parameters for
each algorithm are default and described in the refer-
ences. Fine tuning the respective parameters is out of
the scope of the paper.
3 COMPUTATIONAL
EXPERIMENTS
In order to evaluate the performance of our approach,
we used diverse polygonal domains with convex and
non-convex obstacles, as well as different configu-
rations of bipartite networks. This section describes
our experimental conditions, results and insights ob-
tained.
3.1 Experimental Settings
The computing environment used is Intel i7-4930K @
3.4GHz with Windows 8.1, and computational exper-
iments were performed using Matlab 2016a. In order
to enable a meaningful evaluation of our proposed ap-
proach, we consider the following environmental set-
tings:
• No. of edges in the input bipartite graph,
|E| = {5, 10, 15, 20, 25},
• Number of Polygonal Obstacles: {1, 2, 3, 4, 5},
• No. Sides in each Polygonal Obstacle: {5, 10}.
• For each combination of the above, 30 indepen-
dent experiments were performed to solve Eq. 5,
• For each independent experiment, the maximum
number of functions evaluations is set as 10
4
.
• In each independent experiment, the initial solu-
tions of route bundles x
o
∈ T are initialized ran-
domly and independently.
In order to show the kind of environments and
bipartite networks used in our experiments, Fig. 2
shows the rendering of the polygonal domains and bi-
partite networks with obstacles, each of which has (a)
5 sides and (b) 10 sides. In this figure, we show a
matrix-like configuration, where the x-axis denote the
number of edges in the bipartite network, and the y-
axis denote the number of obstacles in the environ-
ment. The configuration of edges in the bipartite net-
work (origin and destination pairs) are arbitrarily gen-
erated to allow exhaustive evaluation of the optimiza-
tion algorithms.
Furthermore, the main reason of using values of
the number of edges |E| up to 25 is due to our inter-
est in evaluating the performance close to the number
of transport needs in indoor environments, where the
complexity of the environment is controlled by
• the number of obstacles in the polygonal map, and
• the number of sides for each obstacle.
In the above, complex polygonal environments in-
duce in large number of triangles, thus representing
a challenging search space for any search algorithm.
Our future work aims at using configurations consid-
ering large scenarios and being close to outdoor envi-
ronments.
The use of 30 independent runs in each exper-
imental setting allows to evaluate the gradient-free
optimization algorithms under arbitrary initialization
conditions, thus avoiding random luckiness. Also, the
key rationale of using 10
4
function evaluations as up-
per bound of computational budget is due to our in-
terest of evaluating the effectiveness and efficiency
of the heuristics under restrictive computational re-
sources. Note that the use of function evaluations as
a surrogate metric for efficiency is relevant to avoid
bias in hardware or algorithmic implementation.
In line of the above, as a result, 7500 experimental
conditions were evaluated
1
, and 7.5 ×10
9
functions
evaluations were computed
2
, assuming a single opti-
mization using population size |¶| = 100.
3.2 Results and Discussion
In order to show the kind of tree structures obtained,
as well as to evaluate the efficiency in path bundling,
Fig. 3 shows the optimized path bundles; and Fig. 4
- 8 show the convergence behaviour. Note that our
results follows the same organization of Fig. 2, that
is x-axis show the number of edges in the bipartite
network, while y-axis show the number of obstacles
in the environment.
In regards to the obtained path bundles, by observ-
ing Fig. 3 we can confirm the following facts:
• Regardless of polygonal domain, location of
origin-destination pairs in the bipartite network,
and evaluated optimization algorithm, it is pos-
sible to generate tree structures representing the
1
5 ×5 ×5 ×2 ×30
2
5 ×1500 ×10
4
×|¶|
SIMULTECH 2017 - 7th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
424

Figure 2: Bipartite networks in a polygonal domain with
obstacles of (a) 5 sides and (b) 10 sides.
bundled paths which aim at minimizing the global
distance metric.
• The location of the anchoring points of the bun-
dled paths are close to, but not necessarily at, the
center of the origin and destination pairs of the bi-
partite graph.
Regarding convergence behaviour, we confirmed
the following facts (representative examples in Fig. 4
and Fig. 5):
• Regardless of polygonal domain, location of
origin-destination pairs in the bipartite network,
and evaluated optimization algorithm, it is possi-
ble to converge to the bundled paths minimizing
the global distance metric within 2000 function
evaluations.
• DIRECT is the most efficient algorithm achiev-
ing convergence to the path bundles with mini-
Figure 3: Path Bundles in a polygonal domain with obsta-
cles of (a) 5 sides and (b) 10 sides.
mum global distance within 100 function evalu-
ations, in 90% of the experimental cases. Out of
50 experimental cases, there exists 5 experimen-
tal cases wherein DIRECT achieves convergence
in more than 2000 function evaluations.
• Over independent runs, all population-based algo-
rithms show variance in the rate of convergence.
This result is due to the fact of randomness in the
initialization process and the sampling behaviour
of the algorithms, whereas DIRECT is a deter-
ministic algorithm using the DIviding RECTan-
gles concept, which samples solutions vectors at
the center of hypercubes, and then subdivides po-
tentially optimal hypercubes recursively.
• Convergence to local optima in observed in all
population-based algorithms, except RBDE. We
believe this result is due to RBDE uses a select-
Computing Path Bundles in Bipartite Networks
425
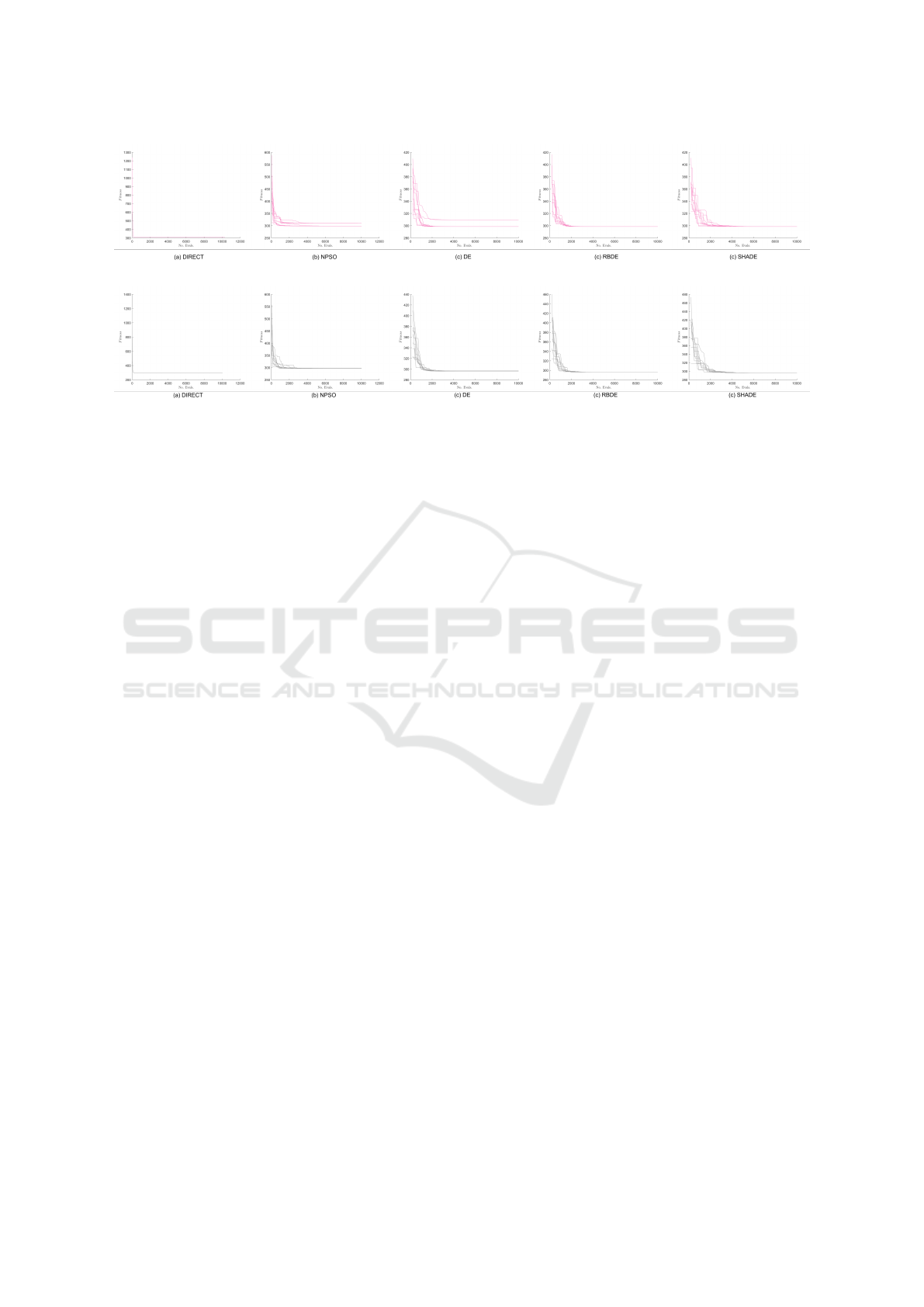
Figure 4: Convergence in polygonal domain with obstacles having 5 sides and a bipartite network with 25 edges.
Figure 5: Convergence in polygonal domain with obstacles having 10 sides and a bipartite network with 25 edges.
ing mechanism which is more greedy compared
to other population-based heuristics. Thus, due
to the single-optima nature of the path bundling
problem, RBDE focuses more on exploitation,
rather than exploration of the search space.
• Increasing the number of edges in the bipartite
network has a direct effect on increasing the dis-
tance metric by some small factor smaller than 1.
We believe the above observations has important
implications to design effective algorithms that solve
the path bundling problem effectively and efficiently.
In line of the above, we provide the following propo-
sitions:
• Instead of using arbitrary initial solutions in the
optimization algorithm, it may be possible to
compute the initial solutions of x of path bundles
which are close to the center/centroid of the origin
and destination pairs of the bipartite networks,
• Whenever the number of edges in the bipartite
network is expected to change (as a result of
increasing/decreasing the number of agents and
both origin-destination pairs), it may be possible
to use pre-computed paths as initial solutions x of
path bundles, since the new paths are expected to
be structurally similar and close distance metric.
• Instead of sampling vectors close to potential so-
lution vectors, it may be possible to sample at
equally and locally distributed partition of the
search space. Furthermore, a convex search space
(as the one proposed in this paper), may be key for
effective and efficient performance of partitioning
the search space.
The above results imply the feasibility and effi-
ciency to obtain optimal path bundles in polygonal
maps with both convex and non-convex obstacles.
Further work remains on the agenda. Key limita-
tions of our approach lie in our environments and net-
works: generalization to dynamic environments, non-
bipartite networks, and networks having very large
number of nodes is still unclear. Further computa-
tional experiments using large number of edges and
diverse obstacle configurations reminiscent of out-
door environments are in our agenda.
4 CONCLUSION
In this paper, we have proposed an approach for de-
signing optimal path bundles based on the idea of
sampling over a convex search space to optimize a
global distance metric. The unique point of our pro-
posed approach is to compute feasible path bundles
efficiently since the convex search space ensures the
avoidance of overlapping (computation of point in-
side polygon is explicitly avoided) while sampling for
optimal solutions.
Exhaustive computational experiments using a di-
verse and representative class of polygonal domains,
bipartite networks and gradient-free optimization al-
gorithms, show that (1) it is possible to obtain bundled
paths with an optimized global distance metric via a
reasonable number of sample evaluations (100 in the
best case), and (2) the convergence is most efficient
with the DIviding RECTangles concept.
We provided relevant insights to develop gradient-
free algorithms for the bundling problem which
regard (1) the use of initialization close to cen-
ter/centroid of origin/destination pairs in the bipar-
tite networks, (2) the use of pre-computed paths to
approximate optimal bundles whenever the bipartite
network varies, and the use of partitioning combined
with a convex representation of the search space.
In future work, we aim at exploiting our insights in
SIMULTECH 2017 - 7th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
426

polygonal environments reminiscent of outdoor con-
figurations. Also, we aim at exploring the generaliza-
tion ability in dynamic and unknown environments.
Furthermore, we aim at extending our approach to
tackle the bundling of networks with different topolo-
gies, e.g. it may be possible to use the DIviding
RECTangles concept with a number-based represen-
tation of undirected networks (Parque et al., 2014a)
and directed networks (Parque and Miyashita, 2017),
where the partition is realized in number-space (rather
than a high-dimensional matrix-space).
We believe our approach opens new possibili-
ties to develop compounded and global path planning
algorithms via gradient-free sampled-based learning
and convex representations of the search space.
REFERENCES
B. Y. Qu, J. J. L. and Suganthan, P. N. (2012). Niching par-
ticle swarm optimization with local search for multi-
modal optimization. Information Sciences, Vol. 197,
pp. 131 - 143.
Cui, W., Zhou, H., H. Qu, P. C. W., and Li, X. (2008).
Geometry-based edge clustering for graph visualiza-
tion. IEEE Transactions on Visualization and Com-
puter Graphics, Vol. 14, pp. 1277 - 1284.
Dijkstra, E. W. (1959). A note on two problems in connexion
with graphs. Numerische Mathematik,1:269-271.
Ersoy, O., Hurther, C., Paulovich, F., Cabtareiro, G., and
Telea, A. (2011). Skeleton-Based Edge Bundlig for
Graph Visualization. IEEE Transactions on Visual-
ization and Computer Graphics, Vol. 17, No. 12, pp.
2364 - 2373.
Falud, R. (2014). Building Wireless Sensor Networks.
O’Reilly Media, Sebastapol, 4th edition.
Gansner, E. R., Y. Hu, S. N., and Scheidegger, C. (2011).
Multilevel agglomerative edge bundling for visualiz-
ing large graphs. IEEE Pacific Visualization Sympo-
sium, pp. 187 - 194.
Holten, D. and van Wijk, J. J. (2009). Force-Directed
Edge Bundling for Graph Visualization. Eurograph-
ics, IEEE-VGTC Symposium on Visualization.
Jones, D. R. (1999). Direct Global Optimization Algo-
rithm. Encyclopedia of Optimization, Kluwer Aca-
demic Publishers.
Kallmann, M. (2005). Path Planning in Triangulations. In
Proceedings of the Workshop on Reasoning, Repre-
sentation, and Learning in Computer Games, IJCAI,
pp. 49 - 54.
Panigrahi, N. and Khilar, P. M. (2015). An evolutionary
based topological optimization strategy for consensus
based clock synchronization protocols in wireless sen-
sor network. Swarm and Evolutionary Computation,
Vol. 22, pp. 66 - 85.
Parque, V., Kobayashi, M., and Higashi, M. (2014a). Bijec-
tions for the numeric representation of labeled graphs.
IEEE International Conference on Systems, Man and
Cybernetics, pp. 447-452.
Parque, V., Kobayashi, M., and Higashi, M. (2014b). Opti-
misation of Bundled Routes. 16th International Con-
ference on Geometry and Graphics, pp. 893-902.
Parque, V., Miura, S., and Miyashita, T. (2015). Opti-
mization of ZigBee Networks using Bundled Routes.
International Conference on Advanced Mechatronics
(ICAM).
Parque, V., Miura, S., and Miyashita, T. (2017). Optimiza-
tion of Route Bundling via Differential Evolution with
a Convex Representation. IEEE International Con-
ference on Real-time Computing and Robotics, Oki-
nawa, Japanforthcoming.
Parque, V. and Miyashita, T. (2017). On succinct represen-
tation of directed graphs. IEEE International Confer-
ence on Big Data and Smart Computing, pp. 199-205.
P.E. Hart, N.J. Nilsson, B. R. (1968). A formal basis for
the heuristic determination of minimum cost paths.
IEEE Transactions on Systems Science and Cybernet-
ics, 4(2):100-107.
R. Osada, T. Funkhouser, B. C. and Dobki, D. (2002).
Shape Distributions. Euro-graphics, ACM Transac-
tions on Graphics, Vol. 21, No. 4, pp. 807-832.
R. Tanabe, A. F. (2013). Success-history based parame-
ter adaptation for differential evolution. Proc. IEEE
Congr. Evol. Comput., Cancun, Mexico, pp. 71-78.
S-M Guo, C-C Yang, P.-H. H. J. S. T. (2015). Improv-
ing Differential Evolution With a Successful-Parent-
Selecting Framework. IEEE Transactions on Evolu-
tionary Computation, Vol. 19, pp. 717 - 730.
Selassie, D., Heller, B., and Heer, J. (2011). Divided Edge
Bundling for Directional Network Data. IEEE Trans-
actions on Visualization and Computer Graphics, Vol.
17, No. 12, pp. 2354 - 2363.
Singh, S. P. and Sharma, S. (2015). A Survey on Cluster
Based Routing Protocols in Wireless Sensor Networks.
Procedia Computer Science, Vol. 45, pp. 687 - 695.
Sutton, A. M., Lunacek, M., and Whitley, L. D. (2007). Dif-
ferential evolution and non-separability: Using selec-
tive pressure to focus search. Proc. 9th Annu.al Con-
ference GECCO, Jul. pp. 1428-1435.
Szurley, J., Bertrand, A., and Moonen, M. (2015). An evo-
lutionary based topological optimization strategy for
consensus based clock synchronization protocols in
wireless sensor network. Signal Processing, Vol. 117,
pp. 44 - 60.
Torkestani, J. A. (2013). An energy-efficient topology
construction algorithm for wireless sensor networks.
Computer Networks, Vol. 57, pp. 1714 - 1725.
Wightman, P. and Labardor, M. (2011). A family of simple
distributed minimum connected dominating set-based
topology construc tion algorithms. Journal of Net-
work and Computer Applications, Vol. 34, pp. 1997
- 2010.
Computing Path Bundles in Bipartite Networks
427
