
Omnidirectional Visual Odometry for Flying Robots
using Low-power Hardware
Simon Reich, Maurice Seer, Lars Berscheid, Florentin W
¨
org
¨
otter and Jan-Matthias Braun
Third Institute of Physics - Biophysics, Georg-August-Universit
¨
at G
¨
ottingen,
Friedrich-Hund-Platz 1, 37077 G
¨
ottingen, Germany
Keywords:
Visual Odometry, Embedded Hardware, Omnidirectional Vision.
Abstract:
Currently, flying robotic systems are in development for package delivery, aerial exploration in catastrophe areas,
or maintenance tasks. While many flying robots are used in connection with powerful, stationary computing
systems, the challenge in autonomous devices—especially in indoor-rescue or rural missions—lies in the need
to do all processing internally on low power hardware. Furthermore, the device cannot rely on a well ordered or
marked surrounding. These requirements make computer vision an important and challenging task for such
systems. To cope with the cumulative problems of low frame rates in combination with high movement rates of
the aerial device, a hyperbolic mirror is mounted on top of a quadrocopter, recording omnidirectional images,
which can capture features during fast pose changes. The viability of this approach will be demonstrated by
analysing several scenes. Here, we present a novel autonomous robot, which performs all computations online
on low power embedded hardware and is therefore a truly autonomous robot. Furthermore, we introduce several
novel algorithms, which have a low computational complexity and therefore enable us to refrain from external
resources.
1 INTRODUCTION
Real time computer vision in fast moving robots re-
mains still a very challenging task, especially when
forced to use limited computing power, e.g. when
having to use embedded systems. There are several
robotic applications existing where this is needed and
one of the most challenging is visual guided on-board-
computed indoor flight. There are no GPS signals
available and the autonomous aerial vehicle (AAV)
has to navigate quickly in often confined spaces. To
enable collision detection, onboard sensors must be uti-
lized. The probably most prominent autonomous robot
is the unmanned car Stanley, which won the DARPA
Grand Challenge in 2005 (Thrun et al., 2006). Stanley
has a wide range of different sensors, including GPS,
laser range sensors, and RADAR sensors: The total po-
wer consumption accumulates to 500 W (Thrun et al.,
2006).
In recent years, energy efficient hardware, which
is still powerful enough, and batteries, which offer
enough power, became available. This allowed on the
one hand for smaller robots and on the other hand for
complex motor control tasks and sensor evaluation—
as it is required in quadrocopters. However, active
Figure 1: The quadrocopter utilized in this work. In the
center, a camera captures omnidirectional images via the
mounted mirror (Compare Fig. 3a).
sensors approaches often lack in high power require-
ments and heavy weight. Both problems are solved by
using an RGB camera, which is a passive sensor and
has low power consumption.
Previous work on autonomous flight can be cate-
gorized into two research areas. First, a lot of works
focus on agile and accurate motion control. Most
prominent is the quadrocopter swarm of ETH Zurich,
which is able to perform synchronized dancing mo-
tions (Sch
¨
ollig et al., 2012) or even to build simple
architectural structures (Augugliaro et al., 2014). But
Reich, S., Seer, M., Berscheid, L., Wörgötter, F. and Braun, J-M.
Omnidirectional Visual Odometry for Flying Robots using Low-power Hardware.
DOI: 10.5220/0006509704990507
In Proceedings of the 13th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2018) - Volume 5: VISAPP, pages
499-507
ISBN: 978-989-758-290-5
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
499

these complex tasks heavily rely on external tracking
of the robots and are thus restricted to lab use. In anot-
her approach, artificial markers in the environment
simplify pose estimation (Eberli et al., 2011). For GPS
enabled areas, complete commercial solutions exist,
e.g. (Remes et al., 2013; Anai et al., 2012).
Second, there are approaches, which only use on-
line sensors for self localization. Still, in many studies
the computational expensive tasks are performed on
external hardware via Bluetooth or wireless LAN links,
e.g. (Engel et al., 2014; Teuli
´
ere et al., 2010), which
limit the independence of the devices. In recent years,
the miniaturization of computers and advancement in
battery design, driven mostly by rapid cell phone de-
velopment, has made it possible to build smaller auto-
nomous robots and perform computations in real time
on the AAV itself. While online computations result
in maximum autonomy, even today, real time compu-
tations on 3D data remain a complex task. Instead of
3D sensors as LIDAR, the Asus Xtion Pro, or the Mi-
crosoft Kinect sensor, most systems use a monocular
camera and perform 3D reconstruction.
For example, already in 2010 in (Olivares-M
´
endez
et al., 2010) detection of a planar landing zone for a
helicopter using a monocular camera is described, al-
lowing for autonomous landing of a helicopter. (Mori
and Scherer, 2013) use a front facing camera to detect
objects in the flight path and estimate size. Yet, all
approaches with camera in a specific direction face the
problem of a small observation window.
Omnidirectional monocular cameras, which pro-
vide a 360
◦
view of the environment, have been
successfully applied to these problems. In (Gaspar
et al., 2001), a slow moving robot estimates the depth
of edges in a corridor using an omnidirectional camera.
(Rodr
´
ıguez-Canosa et al., 2012) apply this procedure
to an unstable flying robot; however, no quantitative
results are shown. In (Demonceaux et al., 2006) this
method is shown to be able to achieve attitude measu-
rements.
In this work, we focus on navigating a flying robot
in unknown, GPS-denied, indoor scenarios. All com-
putations are performed online and in real time—there
will be no external tracking. We ask: what is needed
to safely (and therefore reliably) detect features on a
hardware platform that very strongly jerks, jolts, and
may even flip? And—if those can be found—how
to track them and use them for trajectory planning
on limited hardware in real time? One goal is to im-
prove navigation by introducing a novel lightweight
omnidirectional camera setup for embedded computer
systems. Lastly, we aim to extract features, track them
over multiple frames, compute a 3D point cloud, and
perform high level navigation tasks on this internal
model of the AAV’s environment.
In the following section, we shortly introduce our
hardware approach, a quadrocopter holding an omnidi-
rectional camera. Afterwards, the utilized algorithms
are shown. Then, we describe our experiments and
results, followed by a detailed discussion and conclu-
sion.
2 METHOD
This section divides into three parts: In 2.1 the har-
dware setup is presented, and in 2.2 our algorithms
to arrive at safe trajectory planning are shown. Las-
tly, we will discuss briefly the theoretical limit of the
algorithms.
2.1 Hardware Setup
The hardware setup is depicted in Fig. 1: A quadro-
copter, controlled by a Raspberry Pi mini computer.
These robots are able to turn and even flip on very
short notice. This poses the problem that a front facing
camera is not able to reliably track features, as it has
to deal with huge offsets and many features leaving
the camera’s field of view. We therefore attached a
monocular camera pointing upwards on a hyperboli-
cally shaped mirror, which can also be replaced with
a spherical shaped mirror. Later, we will discuss the
advantages and disadvantages of these shapes. The
camera photographs with a resolution of 320x320 px
at a frequency of 30 Hz.
Additionally, we use an accelerometer and gy-
roscope as input. Also, any contemporary Bluetooth
gaming controller can be attached. This allows easy
control of high level features, e.g. issue the start or lan-
ding command. The 6D pose from the visual odometry
algorithm is merged with data from an accelerometer
and a gyroscope using a Kalman filter. All software
components run as modular and parallel nodes using
the Robot Operating System (ROS (Quigley et al.,
2009)).
2.2 Algorithms
In this section, we describe how we estimate the AAV’s
pose from an omnidirectional monocular RGB images.
All software components run as parallel nodes using
the Robot Operating System (ROS (Quigley et al.,
2009)).
An overview of the proposed system is given in
Fig. 2. First, we compute features and the optical flow
based on the raw camera image. Dewarping the image
enables us to estimate the pose change from the last
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
500
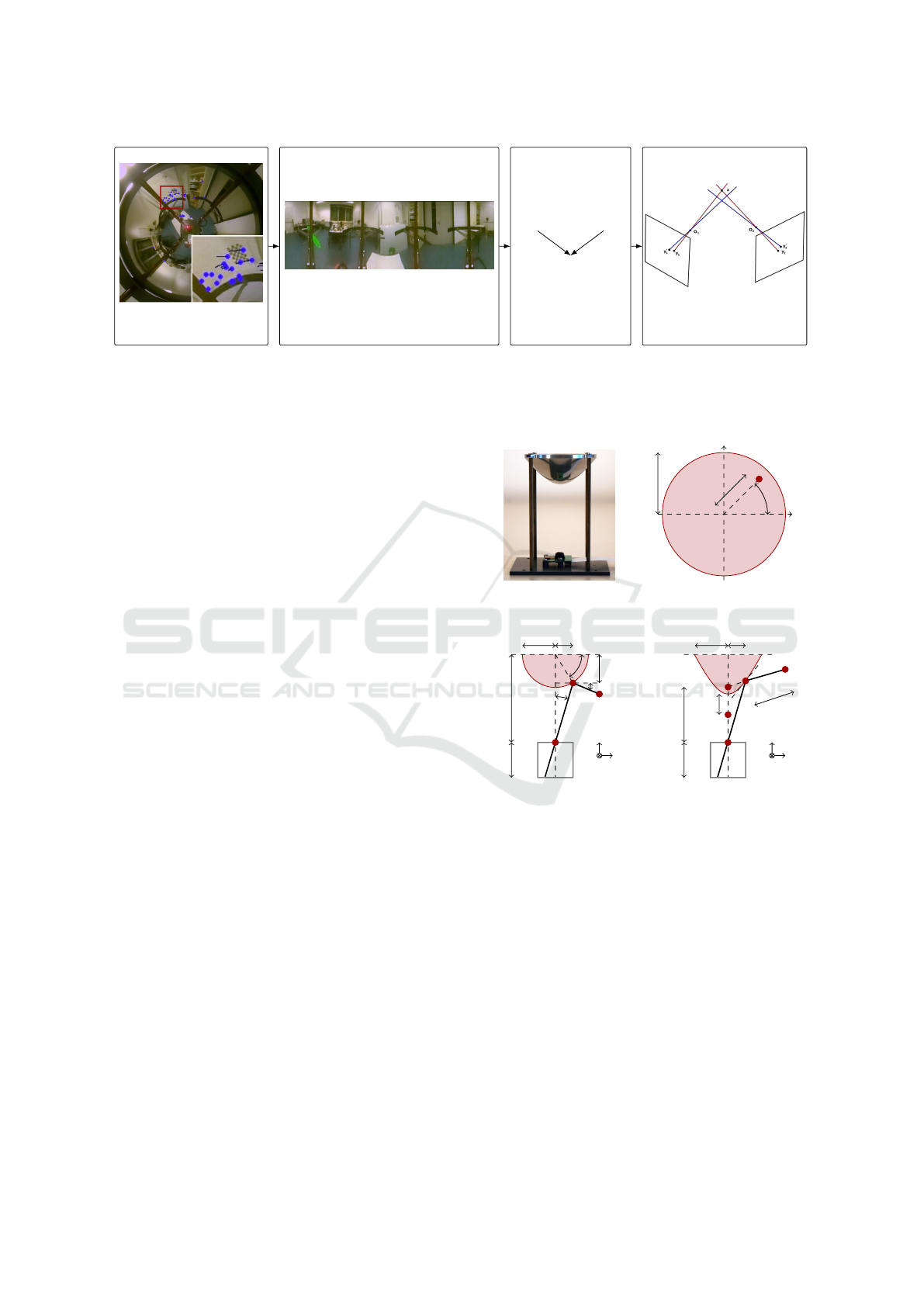
a) Compute features
and optical flow
b) Dewarp &
compute 6 DoF pose
VO
6 DoF
IMU
6 DoF
EKF
c) Fuse VO and
IMU via EKF
d) Compute depth
via triangulation
Figure 2: Pipeline of our proposed algorithm. a) Based on features we compute the optical flow. b) After dewarping the image,
we estimate the pose change. c) An Extended Kalman Filter (EKF) combines the Visual Odometry (VO) results with values
from the Inertial Measurement Unit (IMU). d) After having tracked features for multiple frames, we can estimate the point’s
depth using triangulation and build a depth map.
camera frame (Fig. 2b). An Extended Kalman Fil-
ter (EKF) (Kalman, 1960) fuses the visual odometry
6 DoF results with the 6 DoF of the Inertial Measu-
rement Unit (Fig. 2c). Afterwards, a PID controller,
as demonstrated by (
˚
Astr
¨
om and H
¨
agglund, 2006),
adjusts the motor controllers to manipulate the qua-
drocopter into the goal pose (which is defined by e.g.
SLAM (Williams et al., 2009), corridor flight algo-
rithms (Lange et al., 2012), etc.). As we keep a list of
all tracked features and their relative position to the
robot, we can triangulate each feature and compute
a depth estimate for each feature (Fig. 2d). This can
be used by high level algorithms for map building or
navigation tasks.
2.2.1 Feature Set
As already mentioned, we first compute features on
the raw camera image. Features are points in an image,
which are easy to find, recognize, and track in con-
secutive frames—usually areas rich in texture. Af-
terwards, we compute the optical flow on these fea-
tures. There are numerous publications comparing
different feature algorithms—the most prominent algo-
rithms include FAST (Rosten and Drummond, 2006),
GFTT (Shi and Tomasi, 1994), ORB (Rublee et al.,
2011), SIFT (Lowe, 1999), and SURF (Bay et al.,
2006). Here, we use FAST as it offers a good FAST
offers the best trade-off between computational com-
plexity and quality of found features. This result is
not surprising, as FAST is known to be faster but also
finds less features (El-gayar et al., 2013; Heinly et al.,
2012).
2.2.2 Transformations between Image and
World Coordinates
In the following, we derive transformations
T
S,H
from
image space to the external frame of reference and
(a) The hyperbola mirror.
x
y
~o
0
r
0
ρ
0
−φ
(b) Camera view of the mir-
ror.
x
z
y
~o
~c
l
f
h
ρ
r
α
β
δ
(c) Side view of spherical mir-
ror.
x
z
y
~o
~c
F
1
F
2
2ε
f
a
ρ
r
d
(d) Side view of hyperbola
mirror.
Figure 3: Sketch of a camera observing an object
~o
, which
appears at position
~o
0
in the image plane (bottom left). The
top left figure depicts a simple pinhole model; on the top
right the camera is pointed at a spherical mirror and at the
bottom right at a hyperbolic mirror.
their inverse
T
−1
S,H
.
T
S
indicates a spherical and
T
H
a hy-
perbola shaped mirror. We denote object positions in
image space by 2D coordinates
~o
0
in cartesian
(o
0
x
,o
0
y
)
or polar coordinates
(ρ,φ)
. We denote their counter-
parts in the external frame of reference as
~o ∈ R
3
. The
robot’s pose in the external frame of reference is de-
termined by its position
~c
and orientation
~q
: This is
the pose of the camera’s view as shown in Fig. 3c and
3d. As the derivation of the transformation includes
several coordinate system changes, we here present
the transformations.
Omnidirectional Visual Odometry for Flying Robots using Low-power Hardware
501

Spherical Mirror Model.
A spherical mirror is
mounted with its center in distance
l
above the ca-
mera (Fig. 3c). Using the real sphere radius
r
and
radius
r
0
in image space (Fig. 3b), the reflection’s po-
sition on the mirror can be computed independently
of camera parameters using the scaling factor
s =
r
/
r
0
.
With the unit vector
~e
pointing from the reflection on
the mirror towards the object’s position ~o
~e
S
(~o
0
) =
cosβcosφ
cosβsinφ
−sinβ
,
given the distance
d
,
h =
p
r
2
−ρ
2
, the angles
in Fig. 3b derived from the image coordinates, and
the rotation matrix
R(~q)
between the external frame
of reference and the camera system in Fig. 3b, we can
compute the position ~o by:
T
S
:~o
0
7−→~o :~o =~c+R(~q)
so
0
x
so
0
y
l −h(~o
0
)
+ d~e
S
(~o
0
)
.
For the inverse transformation
T
−1
S
, we use polar coor-
dinates:
T
−1
S
: ~o 7−→~o
0
: ~o
0
= r
0
cosα(~o) ·
cosφ(~o)
sinφ(~o)
,
with
φ = −atan2
(R
−1
(~q)(~o −~c))
y
,(R
−1
(~q)(~o −~c))
y
and
ρ
0
= r
0
cosα(~o)
. As there is no explicit form for
cosα, we use the iterative approximation
cosα ≈
l
r
−sinα
·tan
arctan
−sinα −∆ sin β
r cos α
−2α +
π
2
,
for small focal lengths (
l − f ≈ l
) and large depths
(
d
/
r
1).
Still, the solution is nontrivial and computational
expensive. Considering that we are using autonomous
robots, which perform all computations online on li-
mited hardware, this poses a problem.
Hyperbolic Mirror Model.
Using a hyperbola, the
inverse function can be computed easier and thus faster.
The surface of a hyperbolic mirror is defined by
y
2
a
2
−
x
2
b
2
= 1 , a, b ∈ R (1)
with the semi-major axis
a
. The focal points
F
1,2
are
set apart by
2
√
a
2
+ b
2
=: 2ε
(Fig. 3d). The robot’s
position is defined by the point in the middle of these
two focal points. The camera’s focal point coincides
with
F
2
. With
~e
being the unit vector pointing from the
reflection on the mirror towards the object’s position
~o:
~e
H
(~o
0
) =
s~o
0
x
,s~o
0
y
,
a
b
p
ρ
2
+ b
2
−ε
|
s~o
0
x
,s~o
0
y
,
a
b
p
ρ
2
+ b
2
−ε
|
,
the transformation T
H
is
T
H
:~o
0
7−→~o :
~o =~c + R(~q)
so
0
x
so
0
y
a
b
p
ρ(~o
0
)
2
+ b
2
+ d~e
H
(~o
0
)
.
and therefore the object position at a distance
d
is de-
fined as
~o =~r + R
ˆ
~o + d~e
. For the inverse transfor-
mation in polar coordinates as for the spherical shaped
mirror, it can be shown radius ρ
0
is given by
ρ
0
=
(~o −~c)
ρ
(~o −~c)
2
ρ
·ε
2
/b
2
−1
(~o −~c)
z
ε + a
. (2)
To simplify this expressions, the rotation matrix
R
was
left out. Different camera orientations
~q
are accounted
for by rotating the vector
(~o −~c)
before calculations.
The corresponding image position now found as
~o
0
=
(ρcosφ,ρsinφ)
|
.
2.2.3 Motion and Depth Estimation
Now, we can detect and track features, and, further-
more, compute the robot’s displacement (translation
and rotation) between consecutive frames. We keep
a list of all features for all frames, which means we
have the relative position of each feature from multiple
positions. This enables us to perform triangulation.
While in theory we would get a good estimate, real
world experiments show that quite a lot of noise gets
introduced.
Estimating the depth for
N
features adds signifi-
cant complexity to the problem. Currently, we try to
estimate the quadrocopter’s 6D motion
M
—consisting
of translation
∆~r
and orientation
∆~q
. Our problem has
now increased to
N + 6
dimensions. Changes in the
feature set from frame
~
i
i,t−1
to frame
~
i
i,t
provide
N
equations, meaning features need to be tracked for at
least 3 consecutive frames.
Matching Features with the Inverse Estimation
1.
Depth
d
i,t−1
and motion
M
t
are initialized using
previous data
d
i,t−2
and motion
M
t−1
. The camera
pose
P
t−1
, consisting of position
~c
t−1
and rotation
~q
t−1
, is known.
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
502
2.
For every feature
i
, calculate the global position
~o
i,t−1
using the depth
d
i,t−1
, the image coordina-
tes
~o
0
i,t−1
and the camera pose
P
t−1
. The transfor-
mation
T
X
,
X ∈ {S,H}
is chosen according to the
camera setup, as detailed above.
3.
Apply the inverse motion to all global positions
~o
i,t−1
. This results in the predicted global positions
~o
p
i,t
.
4.
Use the inverse transformation
T
−1
X
, to compute
the predicted image position ~o
0p
i,t
= T
−1
X
~o
p
i,t
.
5.
Lastly, we consider the environment as well as
all global features to be static. Therefore,
~o
i
and
~o
0
i
should be equal for corresponding featu-
res
i
: we minimize the sum of the squared dis-
tances for the last
L
time steps:
SD(d
i,t
,M) =
∑
N
i=0
∑
0
τ=−L
˜
o
0
i,t
−
˜
o
0,p
i,t
2
.
Estimating the Depth with the Forward Estima-
tion
1.
Perform step 1. and 2. from the inverse estimation.
2.
Our goal is to find the new depth
d
i,t
ba-
sed on the previous estimate
d
i,t−1
. In
omnidirectional mirror models, the depth is
d
t
=
R(∆~q
t
)(~o −~c −∆~c
t
) −
ˆ
~o
p
.
The new re-
flection point
ˆ
~o
p
is calculated with the inverse
transformation
T
1
X
. For the spherical mirror, an
approximation considering only rotations is easily
possible. Let
~
k = (0,0,b)
|
be the center of the
spherical mirror. Then
ˆ
~o
p
≈ R (∆~q)
ˆ
~o −
~
k
+
~
k
is
leading to the new depth
d
0
=
R(∆~q
t
)
~o −~c −∆~r
t
−
ˆ
~o +
~
k
−
~
k
. (3)
Due to
∆m d
, the approximation can be consi-
dered to be vanishing.
3. Compute the new predicted pose P
t
= P
t−1
+ M
t
.
4.
Compute predicted global positions
~o
p
i,t=0
for every
feature i based on the camera model.
5.
The positions
~o
i,t
and
~o
p
i,t
should be equal for cor-
responding features
i
. We use this to minimize the
sum of the squared distances
SD(d
i,t
,M) =
N
∑
i=0
0
∑
τ=−L
˜
o
i,t−τ
−
˜
o
p
i,t−τ
d
i,t−τ
2
.
The factor
d
i,t
weights all summands consistently
as the position-error scales linearly with d.
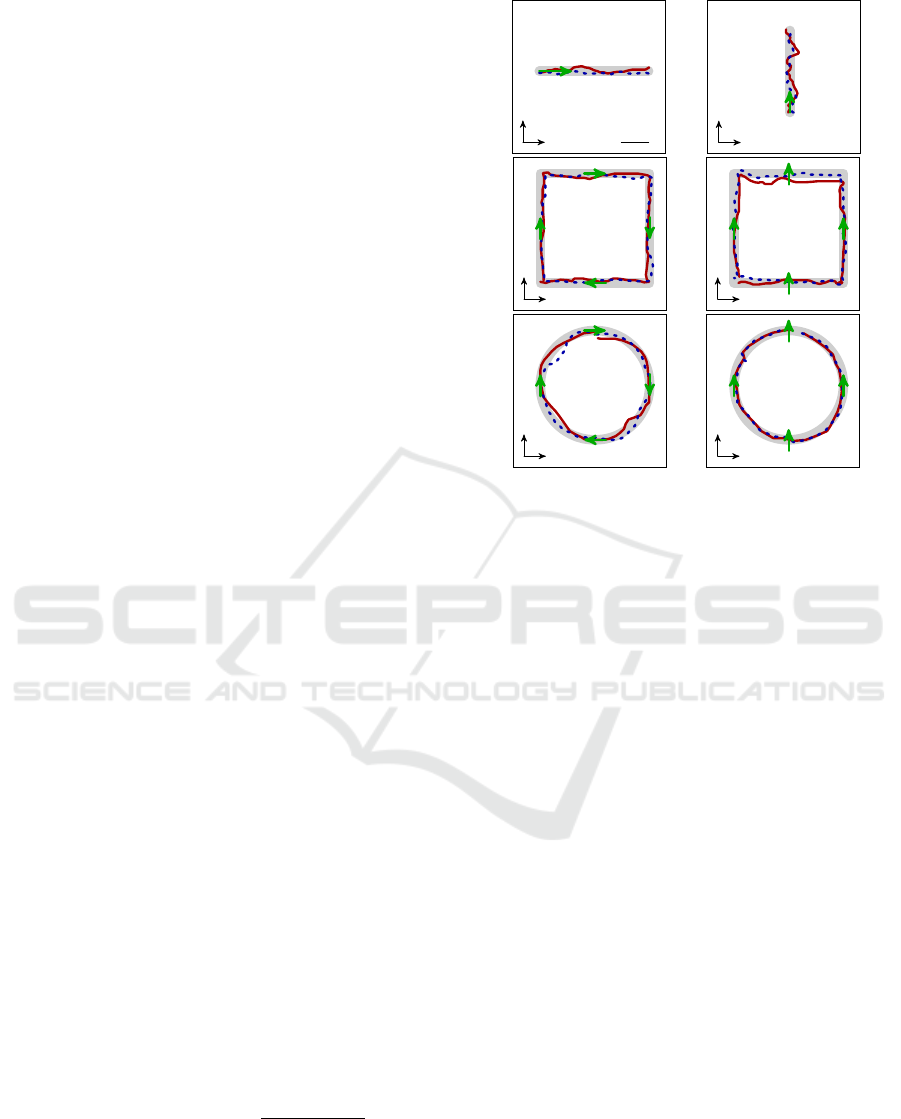
1)
0.5 m
x
y
2)
r
z
3)
x
y
4)
x
y
5)
x
y
6)
x
y
Figure 4: Qualitative examples of all target trajectory recor-
ded while the quadrocopter was moved manually. The target
trajectory is shown in gray, the quadrocopters believe state,
i.e. the sensor data, in red, and external tracking results are
depicted in blue. The direction of sight (this is not necessa-
rily the direction of flight) is marked using green arrows. 1)
line in
x −y
plane; 2) lift off in
z
-direction plotted against the
radius
r
; 3) square, quadrocopter pointing into direction of
flight; 4) square, quadrocopter always pointing into the same
direction; 5) circle, quadrocopter pointing into direction of
flight; 6) circle, quadrocopter always pointing into the same
direction.
2.3 Achievable Angular Resolution
Given a fixed camera resolution of
320 ×320 px
we
can now compute the projection of the hyperbola mir-
ror onto the camera. We assume that the object is at a
distance of
2m
and we require five pixels width to se-
parate it from adjacent objects. After straight forward
application of above formulas, we arrive at a limit of
approximately 1.9
◦
.
3 EXPERIMENTS
3.1 Time Performance
As we have two different setups—namely the hyper-
bola and the spherical mirror—we will first analyze
major differences between both. Due to the shape of
the spherical mirror, the area of self reflection of the ro-
bot is much larger, meaning that less features are found.
We have
320 ×320 px = 102400px
in total, the robot
Omnidirectional Visual Odometry for Flying Robots using Low-power Hardware
503

blocks
58153px
on the spherical mirror and
44892px
on the hyperbola mirror. Furthermore, we can report
a
9%
higher frame rate (resolution
320 ×320px
) for
the hyperbola mirror setup due to the numerical effi-
ciency of the explicit transformation. Full results for
frame rates are shown in Table 1. Since we did not
find any differences in the quality of features or flight
trajectories, we focus here on the hyperbola mirror.
In Table 1 we compare our novel approach to the
SVO (Forster et al., 2014) algorithm. Please note that
SVO only extracts features on selected key frames and
thus does not perform full computations at the reported
frame rate. Also a more powerful processor was used.
3.2 Visual Odometry
We performed flights on six different target trajectories
and for each path ten trials were recorded:
1. a straight line in the x −y plane with length 2 m;
2.
a straight line upwards into the
z
-direction with
length 1.5 m, i.e. lift off;
3.
a square with side length 2 m, the quadrocopter
always pointing into the direction of flight;
4.
a square with side length 2 m, the quadrocopter
always pointing into the same direction;
5.
a circle with diameter 2 m, the quadrocopter al-
ways pointing into the direction of flight;
6.
a circle with diameter 2 m, the quadrocopter al-
ways pointing into the same direction.
An example of each trajectory is shown in Fig. 4. Each
path is recorded in two different setups (this results
in 120 flights total). First, the quadrocopter is moved
manually on the predefined path. This allows us to
quantify the visual odometry without problems that
occur from flight control (e.g. rapid movements or pro-
blems with the flight control algorithms). Afterwards,
we record all paths during full flight.
To achieve a meaningful evaluation, we first need
to generate ground truth information: We utilize an
Asus Xtion Pro camera, which offers 3D depth per-
ception via infrared sensor. Four differently colored
spherical markers are put on the quadrocopter, one
on each end of the cross. This allows stable tracking
of the robot’s translation and rotation in indoor en-
vironments. A summary of its performance is given
in (Haggag et al., 2013). We will call the Xtions data
“external tracking”. To give an idea of the recorded
data, we have included a detailed plot of trajectory 6)
during manual mode in Fig. 5.
We use the Root-Mean-Square Deviation to com-
pute the accumulated differences in the x-y-plane (ex-
y [m]
x [m]
Target Trajectory
Onboard Sensors
External Tracking
−1
−0.5
0
0.5
1
−1 −0.5 0 0.5 1
(a) The recording in the real world state space.
0.9
1
1.1
0 π/2 π 3π/2
Radius [m]
Phase [rad]
(b) Transforming the trajectory to polar coordinates shows
the deviations between external tracking and onboard
sensors in more detail.
Figure 5: The shown trajectory was recorded during one of
the ten flights of trajectory 6) in manual mode as depicted
in Fig. 4: A circle with diameter 2 m (depicted in grey), the
quadrocopter always pointing into the same direction. The
red line shows results from the EKF, which combines VO
and IMU data. Blue dots visualize the trajectory as recorded
by the external tracking system.
cept for experiment 2, where the z and the radial com-
ponent were used) as defined:
RMSD =
s
∑
n
t=1
(
~
ˆs
t
−
~
s
t
)
2
n
. (4)
All results are shown in Table 2 with a graphical repre-
sentation given in Fig. 6.
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
504

Table 1: Frame rates of visual odometry algorithm at different resolutions for the spherical and hyperbola mirror setup. At small
resolutions only few features are found, meaning that there is only a small difference in the transformations. As more features
are found at higher resolutions, the explicit transformation of the hyperbola mirror is about
9%
faster (at
320 ×320px
). We
compare against the SVO algorithms results as shown in (Forster et al., 2014). However, a more powerful hardware platform
containing a quadcore processor with 1.6 GHz was used.
Mirror
160 ×160 px 320 ×320px 640 ×640 px
[Hz] [Hz] [Hz]
Spherical 29.8 ±0.1 24.4 ±0.1 15.8 ±0.1
Hyperbola 29.7 ±0.1 26.6 ±0.1 17.3 ±0.1
SVO 55 ±1 (752 ×480px)
Table 2: For each of the six trajectories (as shown in Fig. 4)
ten trials were performed. The averaged Root-Mean-Square
Deviation in the x-y-plane for these trials is shown here. In
“manual mode” the quadrocopter was moved manually on
the trajectories to eliminate problems from flight control
algorithms. In “Flight Mode” trials were performed in full
flight mode.
Scene
Manual Mode Flight Mode
[m] [m]
1) 0.03 ±0.01 0.07 ±0.03
2) 0.06 ±0.03 0.06 ±0.03
3) 0.07 ±0.04 0.08 ±0.04
4) 0.05 ±0.02 0.09 ±0.04
5) 0.06 ±0.03 0.11 ±0.05
6) 0.04 ±0.02 0.10 ±0.04
Average 0.05 ±0.03 0.09 ±0.04
4 DISCUSSION AND
CONCLUSION
In this paper, we have investigated a novel lightweight
omnidirectional camera setup for flying robots and
tested it on a quadrocopter. The visual odometry is
combined with IMU data and the resulting pose infor-
mation is confirmed using an external tracking camera.
The achieved frame rate of
26.6 ±0.1Hz
, as shown
in Table 1, is sufficient for real-time application in
autonomous agents with low-power hardware. Furt-
hermore, the deviation between external tracking and
internal believe state was found to be
5 ±3 cm
in ma-
nual mode on average; in real flight self localization
performs at
9 ±4cm
. The deviation was determined
in the horizontal plane for experiments 1 and 3-6 and
using the z and radial coordinates for experiment 2.
The utilized external tracking system performs already
with an error of at least
±1cm
(Haggag et al., 2013)
and thus introducing significant uncertainty. Enhance
tracking quality currently remains future work.
While the AAV’s accuracy will be subject to furt-
0
0.04
0.08
0.12
0.16
1. 2. 3. 4. 5. 6. AVG
RMSD [m]
Manual Mode
Flight Mode
Figure 6: We compute the Root-Mean-Square Deviation in
the x-y-plane between external tracking and onboard sensors.
In “AVG” all six trajectories are averaged. Full results are
shown in Table 2. For each scenario 10 trials were performed
and values averaged.
her improvement, it is below the trajectory error of
the flight controller and can therefore be used as a
feedback error signal to increase trajectory control pre-
cision. Thus, we have achieved our goal to enable
autonomous flight in indoor or outdoor GPS-denied
areas with visual odometry.
Lastly, we will look at a real world example to
give an understanding of the error margins. For this,
we will assume a self localization error of
0.1m
and
a frame rate of
25Hz
. Furthermore, we will assume
that the AAV needs 5 frames to detect an obstacle
and initiate counter measures. Using the given frame
rate of
25Hz
, the quadrocopter needs
0.2s
to detect an
obstacle. Within these
0.2s
the safety error margin of
0.1m
(the above localization error) must not be met.
Thus, we can survey in indoor environments with a
velocity of approximately
1.8km/h
. This allows for a
broad range of application, e.g. fast search and rescue
in impassable terrain.
Our work enables autonomous robots to localize
themselves, while allowing at the same time to build
a depth map. This map offers for example obstacle
avoidance or mapping capabilities. All computations
Omnidirectional Visual Odometry for Flying Robots using Low-power Hardware
505

are performed online on embedded hardware, meaning
that the robot is able to work in unknown environments.
It can support autonomously, for example, in search
and rescue mission, disaster relief work, or exploration
tasks.
REFERENCES
Anai, T., Sasaki, T., Osaragi, K., Yamada, M., Otomo, F.,
and Otani, H. (2012). Automatic exterior orientation
procedure for low-cost uav photogrammetry using vi-
deo image tracking technique and gps information. Int.
Arch. Photogramm. Remote Sens. Spat. Inf. Sci.
˚
Astr
¨
om, K. J. and H
¨
agglund, T. (2006). Advanced PID
control. ISA-The Instrumentation, Systems and Auto-
mation Society.
Augugliaro, F., Lupashin, S., Hamer, M., Male, C., Hehn, M.,
Mueller, M. W., Willmann, J. S., Gramazio, F., Kohler,
M., and D’Andrea, R. (2014). The flight assembled
architecture installation: Cooperative construction with
flying machines. IEEE Control Systems, 34(4):46–64.
Bay, H., Tuytelaars, T., and Van Gool, L. (2006). Surf:
Speeded up robust features. In European conference
on computer vision, pages 404–417. Springer.
Demonceaux, C., Vasseur, P., and Pegard, C. (2006). Om-
nidirectional vision on uav for attitude computation.
In IEEE International Conference on Robotics and
Automation (ICRA), pages 2842–2847.
Eberli, D., Scaramuzza, D., Weiss, S., and Siegwart, R.
(2011). Vision based position control for mavs using
one single circular landmark. Journal of Intelligent &
Robotic Systems, 61(1–4):495–512.
El-gayar, M., Soliman, H., and Meky, N. (2013). A com-
parative study of image low level feature extraction
algorithms. Egyptian Informatics Journal, 14(2):175–
181.
Engel, J., Sturm, J., and Cremers, D. (2014). Scale-aware
navigation of a low-cost quadrocopter with a monocu-
lar camera. Robotics and Autonomous Systems (RAS),
62(11):1646–1656.
Forster, C., Pizzoli, M., and Scaramuzza, D. (2014). Svo:
Fast semi-direct monocular visual odometry. In IEEE
International Conference on Robotics and Automation
(ICRA), pages 15–22.
Gaspar, J., Grossmann, E., and Santos-Victor, J. (2001). Inte-
ractive reconstruction from an omnidirectional image.
In 9th International Symposium on Intelligent Robotic
Systems (SIRS01). Citeseer.
Haggag, H., Hossny, M., Filippidis, D., Creighton, D., Na-
havandi, S., and Puri, V. (2013). Measuring depth
accuracy in rgbd cameras. In 7th International Confe-
rence on Signal Processing and Communication Sys-
tems (ICSPCS), pages 1–7.
Heinly, J., Dunn, E., and Frahm, J.-M. (2012). Compara-
tive evaluation of binary features. In Fitzgibbon, A.,
Lazebnik, S., Perona, P., Sato, Y., and Schmid, C., edi-
tors, 12th European Conference on Computer Vision
(ECCV), pages 759–773, Berlin. Springer.
Kalman, R. E. (1960). A new approach to linear filtering
and prediction problems. Journal of basic Engineering,
82(1):35–45.
Lange, S., S
¨
underhauf, N., Neubert, P., Drews, S., and Prot-
zel, P. (2012). Autonomous corridor flight of a uav
using a low-cost and light-weight rgb-d camera. In
R
¨
uckert, U., Joaquin, S., and Felix, W., editors, Ad-
vances in Autonomous Mini Robots: Proceedings of
the 6-th AMiRE Symposium, pages 183–192, Berlin.
Springer.
Lowe, D. G. (1999). Object recognition from local scale-
invariant features. In The proceedings of the seventh
IEEE international conference on Computer vision,
volume 2, pages 1150–1157. IEEE.
Mori, T. and Scherer, S. (2013). First results in detecting and
avoiding frontal obstacles from a monocular camera for
micro unmanned aerial vehicles. In IEEE International
Conference on Robotics and Automation (ICRA), pages
1750–1757.
Olivares-M
´
endez, M. A., Mondrag
´
on, I. F., Campoy, P., and
Mart
´
ınez, C. (2010). Fuzzy controller for uav-landing
task using 3d-position visual estimation. In Fuzzy
Systems (FUZZ), 2010 IEEE International Conference
on, pages 1–8.
Quigley, M., Conley, K., Gerkey, B. P., Faust, J., Foote, T.,
Leibs, J., Wheeler, R., and Ng, A. Y. (2009). Ros: an
open-source robot operating system. In ICRA Works-
hop on Open Source Software.
Remes, B., Hensen, D., Van Tienen, F., De Wagter, C.,
Van der Horst, E., and De Croon, G. (2013). Paparazzi:
how to make a swarm of parrot ar drones fly autono-
mously based on gps. In IMAV 2013: Proceedings of
the International Micro Air Vehicle Conference and
Flight Competition, Toulouse, France, 17-20 Septem-
ber 2013.
Rodr
´
ıguez-Canosa, G. R., Thomas, S., del Cerro, J., Bar-
rientos, A., and MacDonald, B. (2012). A real-time
method to detect and track moving objects (datmo)
from unmanned aerial vehicles (uavs) using a single
camera. Remote Sensing, 4(4):1090–1111.
Rosten, E. and Drummond, T. (2006). Machine learning for
high-speed corner detection. In Leonardis, A., Bischof,
H., and Pinz, A., editors, 9th European Conference
on Computer Vision (ECCV), pages 430–443, Berlin,
Heidelberg. Springer Berlin Heidelberg.
Rublee, E., Rabaud, V., Konolige, K., and Bradski, G. (2011).
Orb: An efficient alternative to sift or surf. In Internati-
onal conference on computer vision, pages 2564–2571.
IEEE.
Sch
¨
ollig, A., Augugliaro, F., and D’Andrea, R. (2012). A
platform for dance performances with multiple quadro-
copters. Improving Tracking Performance by Learning
from Past Data, page 147.
Shi, J. and Tomasi, C. (1994). Good features to track. In
IEEE Computer Society Conference on Computer Vi-
sion and Pattern Recognition, pages 593–600. IEEE.
Teuli
´
ere, C., Eck, L., Marchand, E., and Gu
´
enard, N. (2010).
3d model-based tracking for uav position control. In
IEEE/RSJ International Conference on Intelligent Ro-
bots and Systems (IROS), pages 1084–1089.
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
506

Thrun, S., Montemerlo, M., Dahlkamp, H., Stavens, D.,
Aron, A., Diebel, J., Fong, P., Gale, J., Halpenny, M.,
Hoffmann, G., Lau, K., Oakley, C., Palatucci, M., Pratt,
V., Stang, P., Strohband, S., Dupont, C., Jendrossek, L.-
E., Koelen, C., Markey, C., Rummel, C., van Niekerk,
J., Jensen, E., Alessandrini, P., Bradski, G., Davies, B.,
Ettinger, S., Kaehler, A., Nefian, A., and Mahoney, P.
(2006). Stanley: The robot that won the DARPA grand
challenge. Journal of Field Robotics, 23(9):661–692.
Williams, B., Cummins, M., Neira, J., Newman, P., Reid,
I., and Tard
´
os, J. (2009). A comparison of loop clo-
sing techniques in monocular SLAM. Robotics and
Autonomous Systems, 57(12):1188–1197. Inside Data
Association.
Omnidirectional Visual Odometry for Flying Robots using Low-power Hardware
507
