
Evaluation of Visual Object Trackers on Equirectangular Panorama
Ugur Kart
1
, Joni-Kristian K
¨
am
¨
ar
¨
ainen
1
, Lixin Fan
2
and Moncef Gabbouj
1
Laboratory of Signal Processing, Tampere University of Technology, Finland
2
Nokia Technologies, 33100, Tampere, Finland
Keywords:
Tracking, Equirectangular, 360
◦
-video.
Abstract:
Equirectangular (360
◦
spherical) panorama is the most widely adopted format to store and broadcast virtual
reality (VR) videos. Equirectangular projection provides a new challenge to adapt existing computer vision
methods for the novel input type. In this work, we introduce a new dataset which consists of high quality
equirectangular videos captured using a high-end VR camera (Nokia OZO). We also provide the original wide
angle (8× 195
◦
) videos and densely annotated bounding boxes for evaluating object detectors and trackers.
In this work, we introduce the dataset, compare state-of-the-art trackers for object tracking in equirectangular
panorama and report detailed analysis of the failure cases which reveal potential factors to improve the existing
visual object trackers for the new type of input.
1 INTRODUCTION
Virtual Reality(VR) and 360
◦
video have recently cre-
ated a big disruption in multiple industries. Thanks to
its ability to create immersive experiences, 360
◦
VR
has shown a big potential in areas such as education,
entertainment and communication. Despite of VR
and 360
◦
videos being around for some time, their wi-
despread usage is a rather new phenomenon. Hence,
suitable content for research purposes is still largely
missing as capturing devices have been commercially
available only for a short duration.
A fundamental problem of computer vision is
visual object tracking. This paper’s scope covers
model-free, single object tracking where the object’s
coordinates are fed into the system as a bounding
box at the beginning of the sequence and the algo-
rithm tries to track the object in the consecutive fra-
mes automatically. Due to its importance in various
real-life applications such as autonomous driving sy-
stems, surveillance systems, medical imaging, robo-
tics, human-computer interfaces, there is continuous
interest on this topic (Wu et al., ; Held et al., 2016;
Kalal et al., 2011; Hare et al., 2016; Kristan et al.,
2016b).
In order to evaluate the performance of tracking
algorithms systematically, many valuable bench-
marks have been proposed in the literature. Among
these, PETS (Ferryman and Ellis, 2010), OTB50 (Wu
et al., ), ALOV300+ (Smeulders et al., 2014),
VOT2014 (Kristan et al., 2014), VOT2015 (Kristan
et al., 2015) and VOT2016 (Kristan et al., 2016a) are
the few prominent and recent ones. However, they
all focus on videos recorded with regular monosco-
pic cameras which have distinctly different characte-
ristics as compared to equirectangular panorama 360
◦
videos. Therefore, we believe that creating an annota-
ted dataset designed with this purpose in mind is ne-
cessary and it was our main motivation in this work.
Contributions – We make the following novel con-
tributions:
• We introduce a novel 360
◦
visual object tracking
benchmark dataset that will be made publicly
available with its fisheye source videos, calibra-
tion data and ground truth for equirectangular pa-
norama videos.
• We evaluate a set of state-of-the-art trackers on
this novel dataset.
• We provide a detailed analysis of the common fai-
lure cases that reveals potential ways to improve
the trackers for object tracking in equirectangular
panorama videos.
2 RELATED WORK
Equirectangular Panorama – Oculus Rift type Vir-
tual Reality (VR) Head-Mounted Displays (HMDs)
are becoming popular and many affordable devices
Kart, U., Kämäräinen, J-K., Fan, L. and Gabbouj, M.
Evaluation of Visual Object Trackers on Equirectangular Panorama.
DOI: 10.5220/0006526200250032
In Proceedings of the 13th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2018) - Volume 5: VISAPP, pages
25-32
ISBN: 978-989-758-290-5
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
25

Figure 1: Equirectangular panorama projection creates large appearance changes (scale, geometric distortion and 3D view
point) even for objects moving along a straight line trajectory. This will provide a novel challenge for existing trackers as
shown in our experiments. In the above example the VOT2015 winner tracker misses the track of a bus steadily driving along
the nearby street due to a dramatic appearance change.
are available for customers. Immersive experience re-
quires ultra high resolution 360
◦
videos which can be
captured with high-end multi-camera devices such as
Nokia OZO. Proper viewing requires transmission of
360
◦
spherical frames and the equirectangular pano-
rama has become the de facto standard. Equirectan-
gular panorama is a well-known projection to map a
3D sphere (e.g., the world) to a 2D plane (equidistant
cylindrical projection, e.g., a world map). Equirec-
tangular panorama raises several technical challenges
which have been recently investigated such as distor-
ting projections (Carroll et al., 2009) and video enco-
ding (Corbillon et al., 2017).
Hitherto there have been only a few attempts in
vision community to process 360
◦
content. Xiao et
al. (Xiao et al., ) introduced a method for scene re-
cognition from a panoramic view. They also introdu-
ced a new database of 360
◦
panoramic images from
26 place categories on which they proposed an algo-
rithm for classifying the place that the picture is taken
from (e.g. a theater) and what direction the observer
looks towards. However, they only studied still ima-
ges. There are also recent attempts to convert 360
◦
video to traditional 2D displays (Su et al., 2016; Su
and Grauman, 2017). To the authors’ best knowledge
our work is the first to study visual object tracking in
equirectangular panorama projection of spherical vi-
deo. In their recent work, Cehovin et al. proposed
a 360
◦
video dataset to investigate the effects of ap-
parent motion on visual tracking algorithms (Cehovin
et al., 2016), but they use 360
◦
video only to generate
apparent motion patterns and the tracking itself is per-
formed on traditional views generated by a suitable
viewport projection. In our dataset, we also provide
the original and unprocessed OZO fisheye source vi-
deos with the calibration data to facilitate future work
where different projection schemes can be investiga-
ted for 360
◦
video tracking. Our dataset is also larger
than theirs (24k vs. 17k annotated frames, respecti-
vely).
Visual Object Tracking – Our problem is single
object causal tracking without object re-identification
(re-identification can however be investigated with
our dataset as many objects frequently disappear and
reappear in the scenes). In our experiments, trac-
kers are initialized using the ground truth axis-aligned
bounding boxes and trackers do not use prior kno-
wledge about the targets. Such single camera, sin-
gle object visual object tracking has a long history
due to its importance in many vision problems. The
field is expanding with growing number of sophistica-
ted methods (Nam and Han, ; Danelljan et al., 2016)
whereas some simpler methods might also work sur-
prisingly well in a generic setting (Henriques et al.,
2014). Trackers can be classified under two main fa-
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
26

milies which are generative and discriminative appro-
aches. Generative approaches create an appearance
model of an object in the first frame and then try to
find the best match in the next frames with a simi-
larity metric. On the other hand, discriminative ap-
proaches, also known as tracking-by-detection, de-
cide whether the object exists in a given patch in the
next frame or not. Regardless of the family they be-
long, the fundamental idea underlying the visual ob-
ject tracking is very similar in all and can be exami-
ned in five steps (Smeulders et al., 2014): 1) Tar-
get Region Representation - A target region can be
a bounding box, contours or multiple patches for de-
formable models but the clear trend is towards uti-
lizing bounding boxes (Kristan et al., 2015; Kristan
et al., 2016a); 2) Appearance Representation - A set
of visual features that represent the appearance of an
image window varying from grayscale intensity va-
lues (Hare et al., 2016) to CNN features (Danelljan
et al., 2016); 3) Motion Representation - defines the
mechanism for a candidate search region in the next
frame and motion models which are centered at pre-
vious location are popular (Hare et al., 2016; Nam
and Han, ); 4) Method - It is the heart of the tracking
algorithm and defines how it actually tracks the ob-
jects over the frames. Although searching without any
prior spatial assumptions has its own strengths, it re-
lies on appearance model heavily which tends to be
erroneous due to the appearance changes during the
video. Therefore, a particle filter is preferred in the
presence of high computation power. 5) Model Upda-
ting - Since the appearance of an object might change
frequently in a sequence (view point changes), many
modern trackers store last seen appearances to obtain
a more comprehensive appearance database (Nam and
Han, ; Danelljan et al., 2016; Kalal et al., 2011).
3 EQUIRECTANGULAR
PANORAMA VIDEO DATASET
There is an increasing amount of spherical panorama
videos in YouTube, but most of them are short and
poor quality. Our motivation is to study vision met-
hods for professional quality 360
◦
videos which are
the main format to be used in future commercial tele-
vision broadcasts and films. Our device of choice was
Nokia OZO VR camera which is a high-end product
aimed for professionals. We captured long videos
from various academic events (lectures and scientific
presentations, academic year opening ceremony and
a department’s Christmas party) and one video from
the local train station. OZO records eight separate vi-
deos using synchronized fisheye lenses with 2K × 2K
Figure 2: Unprocessed frames from Nokia OZO wide angle
(195
◦
) base lenses and a equirectangular panorama frame
where the lenses are projected and stitched. Our dataset
provides the stitched panorama and individual lens videos
with their calibration data.
sensors and 195
◦
angle of view wide angle lenses (Fi-
gure 2). We provide both the wide angle videos along
with their factory calibration parameters and also ge-
nerated equirectangular panorama videos made with
a publicly available software for OZO (OZO Creator)
that uses the same calibration parameters.
Table 1: Description of the annotated benchmark data. N
is the number of frames in the sequence, N
valid
is the total
number of visible annotations. Please note that a frame can
have multiple annotations for different objects which is the
reason of having N
valid
N.
Video Seq No Object # N N
valid
Party 1 People 13 3600 24841
2 Food Cart 1 7605 5662
Train station 1 Bus 3 3600 4388
Car 3
Minivan 3
People 2
Lecture 1 People 1 3600 3530
For evaluating model-free visual trackers, we ma-
nually selected suitable sequences from videos and
annotated various class instances for each sequence
(see Table 1 for details). The Christmas party sequen-
ces contain more than 50 people, poor night time il-
lumination, a lot of occlusions and many object dis-
tortions due to equirectangular projection and there-
fore is a challenging dataset for people tracking. 13
people were annotated and one food cart in a sepa-
rate sequence. The Lecture video contains mainly the
lecturer as a moving object, but provides a challenge
for long-time tracking evaluation. The lecturer is fre-
quently moving and being close to camera yields fast
and severe scale changes and distortions. Due to the
front spot lights the illumination is considerably poor
towards the panorama image edges and that with par-
tial occlusions may confuse trackers. Train Station
video was captured outside on a sunny day. It was re-
corded in the front of a train station to include many
Evaluation of Visual Object Trackers on Equirectangular Panorama
27

vehicles and pedestrians passing by. There are occlu-
sions due to other vehicles and pedestrians and for
cars passing through the nearby street there is signifi-
cant view point and scale changes.
The manual annotations to provide the ground
truth for the evaluated trackers was made by using the
publicly available Vatic software. The software pro-
vides easy and fast to use GUI to annotate bounding
boxes with objects’ apparent occlusion and visibility
properties. All annotations were made manually and
object was marked “occluded” if more than 50% was
missing and “not visible” if it was not possible to see
the object.
4 TRACKER EVALUATION
In this section we report the results from quantitative
and qualitative evaluation of four state-of-the-art and
one baseline tracker with the equirectangular 360
◦
vi-
deo dataset introduced in Section 3. The overall work-
flow corresponds to the popular supervised evalua-
tion mode protocol used in the annual VOT compe-
titions (Kristan et al., 2016b).
4.1 Trackers
We selected the top performers of the recent Visual
Object Tracking (VOT) Challenges: MDNet is the
winning submission in VOT2015 and C-COT on pair
with the winning submission (TCNN (Nam and Han,
)) in VOT2016. These both use features extracted by
convolutional neural networks (CNNs). MDNet and
C-COT are below the real-time performance and the-
refore we included also the recent CNN-based trac-
ker by Held et al. (Held et al., 2016) who provide su-
per real-time (100fps) implementation. For all CNN-
based trackers we used the implementations by the
original authors and with their default parameters. As
a baseline tracker we selected the OpenCV implemen-
tation of the original TLD tracker which is still po-
pular among developers. As a more up-to-date algo-
rithm, STRUCK tracker by Hare et al. (Hare et al.,
2016) was also included (authors’ public implemen-
tation with default parameter values). Properties of
the selected trackers are summarized in Table 2 and
below we briefly describe each tracker.
C-COT – C-COT achieved on pair performance
to the winning method of the VOT2016 competi-
tion (Kristan et al., 2016a). Following the recent de-
velopments in the field, it uses MatConvNet (Vedaldi
and Lenc, 2015) to extract features from patch locati-
ons. These features are then interpolated into continu-
ous domain to achieve per pixel accuracy. The inter-
polated features are used to learn a linear convolution
operator which maps a given patch x to a confidence
score s which is then utilized for finding the image
patch with maximum score.
MDNet – The winner of the VOT2015 competition.
The method adopts pre-training of a Convolutional
Neural Network (CNN) with multiple videos to le-
arn sequence agnostic features that are common for
all videos. This is achieved by having two types of
layers in the training network; shared and domain-
specific. On each training iteration, only one se-
quence and its specific fully-connected layer is ena-
bled while shared-layers are kept the same. At the
end of the training process, the domain-specific lay-
ers are swapped with a single fully-connected layer
that is used in testing sequences.
GOTURN – The method relies completely
on training data which are obtained from the
ALOV300++ (Smeulders et al., 2014) and Image-
Net (Russakovsky et al., 2015) datasets. During the
training stage, they randomly pick pairs of successive
frames and feed the ground truth bounding boxes and
their augmented versions into the convolutional layers
which are later used as the inputs of fully-connected
layers. The method is extremely efficient running 100
FPS since it does not do need any online learning.
TLD – The original method adopting the three stage
structure - tracking-learning-detection - that fuses the
stages to correct possible errors. The tracking part
tracks the given object frame-by-frame while the de-
tector part independently searches each frame with
an appearance model learned in the previous fra-
mes. Method uses two experts called P-Expert and N-
Expert; P-Expert learns false negatives by assuming
an object is supposed to follow a smooth trajectory.
By utilizing this information, the tracker makes an es-
timation of the spatial location of the object in the next
frame. If the detector part claims that there is no ob-
ject in that location, it adds a positive sample into its
training set. On the other hand, N-Expert learns false
positives by using the fact that the object can be at
only one location. Using outputs of the detector, the
detectors choose the ones which do not overlap with
the most confident result and add these patches to a
training set.
STRUCK – A more recent implementation of the
tracking-by-detection principle by adopting Structu-
red Support Vector Machines (SSVMs) to learn how
to predict object’s position in the next frame instead
of making a binary prediction at each candidate loca-
tion. The method exploits three different types of low-
level features to achieve better accuracy. First, pixel
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
28

Table 2: Properties of the selected trackers.
C-COT (Danelljan et al., 2016) MDNet (Nam and Han, ) GOTURN (Held et al., 2016) STRUCK (Hare et al., 2016) TLD (Kalal et al., 2011)
Features CNN CNN CNN Raw Intensity, Haar, Intensity Histogram Raw Intensity
Training Data X X X
Real-Time (R-T) X X
Super R-T X
Implementation Matlab Matlab C++ C++ C++
features are extracted by downsampling an image pa-
tch to 16 × 16 followed by a normalization of the
greyscale values into [0, 1] (256-dimensional feature).
Secondly, six different Haar features are exracted to
form a 192-dimensional feature vector (normalized to
[−1, 1]). The third feature set is a 16-bin intensity his-
togram obtained from four levels of a spatial pyramid
and yielding to a 480-dimensional feature vector.
4.2 Performance Measures and Settings
According to the common practice in the tracking
community, we adopted the weakly-correlated me-
trics: accuracy ρ
A
and robustness ρ
R
from (Kristan
et al., 2016b). Tracker accuracy measures perfor-
mance through its ability to cover ground truth boun-
ding boxes over time and it is defined as intersection-
over-union per frame t basis
φ
t
=
A
t
G
∩ A
t
T
A
t
G
∪ A
t
T
(1)
where A
T
t
is the tracker T provided bounding box and
A
G
t
the ground truth. Robustness value is the number
of failures in a given sequence.
Each tracker is run five times (i = 1, . . . , N
rep
where N
rep
= 5) and during the analysis, a burn-in
region of 10 frames as suggested in (Kristan et al.,
2016b) is used. This means that the tracking results
of 10 frames after re-initialization are not included in
the calculations since these tend to be biased until a
certain number of frames pass. An overall result for
the i:th run is calculated as
ρ
A
=
1
|N
valid
|
∑
t∈N
valid
φ
t
(i) (2)
where N
valid
is the number of frames in which at least
50% of the object area is visible and the frame is out-
side of burn-in region. The average of multiple runs
is equal to an average accuracy over all valid frames
and repetations. Average robustness is calculated as
the average of the number of failures F over N
rep
in-
dependent runs
ρ
R
=
1
N
rep
N
rep
∑
k=1
F(k) (3)
Trackers are initialized with a ground truth boun-
ding box in the first frame of each sequence and af-
ter each frame compared against the manually annota-
ted ground truth. Whenever a tracking failure occurs
(φ
t
= 0), the tracker is re-initialized on the fifth frame
after the failure as recommended in (Kristan et al.,
2016b) to avoid counting the same source of failure
multiple times.
All trackers were executed using the default pa-
rameters and run on a Linux machine with Core i7-
6700K CPU, NVIDIA GeForce GTX980Ti GPU and
16GB RAM. For computational reasons we downs-
ampled each panorama frame to W × H = 2048 ×
1024 and increased the Party video brightness by
100%.
4.3 Results
The evaluation results for all annotated objects in four
different videos are shown in Table 3 which also in-
cludes the computation times. Weighted average per
video is calculated by using the number of valid fra-
mes per video as the weigthing factor. As expected
the baseline method TLD is clearly the weakest, but
the more recent implementation of the same compu-
ting principle, STRUCK, performs very well as com-
pared to the recent methods using CNN features and
its C++ implementation is almost real-time. Interes-
tingly, the VOT2015 winner MDNet outperforms the
VOT2016 top performer by a clear margin. This re-
sult can be explained by MDNet’s good performance
on tracking people in our dataset. It is our belief that
due to many slowly moving objects in their training
set, their features perform better on people. GOTURN
can provide fast computation (6× real-time) with the
price of weaker accuracy, but still rather low failure
rate (2nd best). Selection between MDNet/C-COT
and GOTURN can be made based on computational
limits.
4.4 Analysis of Tracking Failures
We analysed the root causes of the tracking failures
with our dataset. For analysis we used the follo-
wing methodology: for each tracking failure of the
top three performing trackers (C-COT, MDNet and
STRUCK), we created a mini sequence which starts
90 frames before the actual failure frame and obser-
ved the tracking results visually to understand under-
lying reasons of the failures. Although 90 frames
might strike as too many, we believe that it is ne-
cessary since failure of a tracker is a process which
starts much earlier than the actual failure. We tried
Evaluation of Visual Object Trackers on Equirectangular Panorama
29

Table 3: Results for tracking objects in equirectangular panorama.
Accuracy Failures
C-COT MDNet GOTURN STRUCK TLD CCOT MDNet GOTURN STRUCK TLD
Party::People
1 0.689 0.631 0.436 0.608 0.616 2.00 1.00 2.00 2.60 15.80
2 0.605 0.691 0.383 0.647 0.375 3.00 0.00 2.00 2.00 17.40
3 0.344 0.415 0.329 0.329 0.459 1.00 0.00 1.00 0.00 14.20
4 0.520 0.640 0.465 0.410 0.376 4.00 0.40 1.00 1.00 17.60
5 0.687 0.667 0.471 0.573 0.577 1.00 1.00 2.00 1.00 27.00
6 0.586 0.636 0.615 0.472 0.538 1.00 0.00 0.00 4.60 12.80
7 0.584 0.644 0.407 0.546 0.499 4.00 0.00 0.00 6.40 29.80
8 0.434 0.691 0.609 0.498 0.509 1.00 0.00 2.00 2.80 14.40
9 0.570 0.598 0.472 0.445 0.529 2.00 0.00 0.00 0.20 16.00
10 0.510 0.527 0.357 0.294 0.350 0.00 0.00 1.00 0.00 9.20
11 0.795 0.799 0.237 0.774 0.481 3.00 0.00 2.00 4.40 13.60
12 0.599 0.619 0.418 0.637 0.411 2.00 0.00 5.00 0.00 23.00
13 0.610 0.708 0.500 0.541 0.420 3.00 1.40 0.00 0.00 14.00
w.-avg. 0.580 0.627 0.417 0.532 0.474 2.07 0.36 1.38 1.92 17.29
Party::Food Cart
1 0.822 0.786 0.493 0.841 0.506 1.00 1.80 1.00 1.00 15.40
Train Station:: 9 vehicles and 2 people
Car-1 0.599 0.526 0.482 0.466 0.441 2.00 0.00 1.00 2.00 14.00
Car-2 0.342 0.496 0.596 0.278 0.450 1.00 0.00 0.00 1.00 16.00
Car-3 0.330 0.554 0.507 0.421 0.472 0.00 0.00 1.00 0.00 10.00
Bus-1 0.541 0.531 0.308 0.344 0.437 2.00 2.00 1.00 1.00 8.00
Bus-2 0.467 0.283 0.533 0.093 0.145 2.00 2.00 2.00 1.00 6.00
Bus-3 0.697 0.656 0.382 0.454 0.498 2.00 1.00 3.00 2.00 12.00
Minivan-1 0.352 0.443 0.441 0.294 0.393 4.00 2.00 3.00 3.00 12.00
Minivan-2 0.672 0.631 0.621 0.547 0.483 0.00 1.00 1.00 1.00 4.00
Minivan-3 0.251 0.484 0.503 0.286 0.464 0.00 0.00 0.00 0.00 4.00
Person-1 0.735 0.652 0.316 0.467 0.345 1.00 2.00 9.00 3.00 26.00
Person-2 0.750 0.689 0.551 0.548 0.401 0.00 0.00 2.00 2.00 46.00
w.-avg. 0.566 0.530 0.454 0.363 0.383 1.27 0.90 2.09 1.58 14.94
Lecture::Lecturer
0.503 0.764 0.502 0.462 0.608 0.00 0.00 1.00 3.00 24.00
overall w.-avg. 0.607 0.653 0.440 0.555 0.505 1.63 0.60 1.37 1.84 17.35
Average Computation Times
Seconds per frame × real-time (30 FPS = 1.0)
1.877 0.710 0.005 0.034 0.132 0.0178 0.0469 6.666 0.980 0.252
to identify the main failure classes, but this can still
be ambiguous since multiple causes can take place si-
multaneously. However, we were able to define the
following four main classes: Noisy Initialization co-
vers the cases where initialization of a tracker is im-
perfect, e.g., partial occlusion; Occlusion means cases
where partial occlusion during tracking causes drif-
ting and finally a failure; Appearance Change covers
severe changes in object’s appearance which might
have been due to rapid illumination change, object’s
self-occlusion (e.g. waving hands in front of a per-
son), or, in particular, a large view point change which
often occur in spherical video; The final category is
Other which covers the rest. Examples from each ca-
tegory can be seen in Figure 3 and the distributions of
the failure cases for the top three trackers are given in
Figure 4.
It can be observed in Figure 4 that appearance
changes present the biggest tracking challenge for all
top three trackers with our dataset. This can be explai-
ned by the fact that equirectangular panorama covers
wide angle where appearance of an object can gre-
atly change depending on the location of the object in
the panorama. Reasons can be illumination changes
in different parts of the panoramic scene, large scale
changes due to equirectangular projection and, in par-
ticular, scale changes combined with 3D view point
changes (see the passing bus example in Figure 3).
The bus example further confirms that the C-COT
tracker is trying to find similar appearances seen ear-
lier, e.g., the windscreen of the bus. Instead of trying
to increase the scale and learn a new appearance
mode, it clings on the most similar appearance to the
previously seen appearances as a result of considering
the tracked object as an image patch rather than an ob-
ject. This is understandable as in the videos capture
with normal lenses such drastic changes rarely occur.
These findings indicate that the existing trackers can
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
30
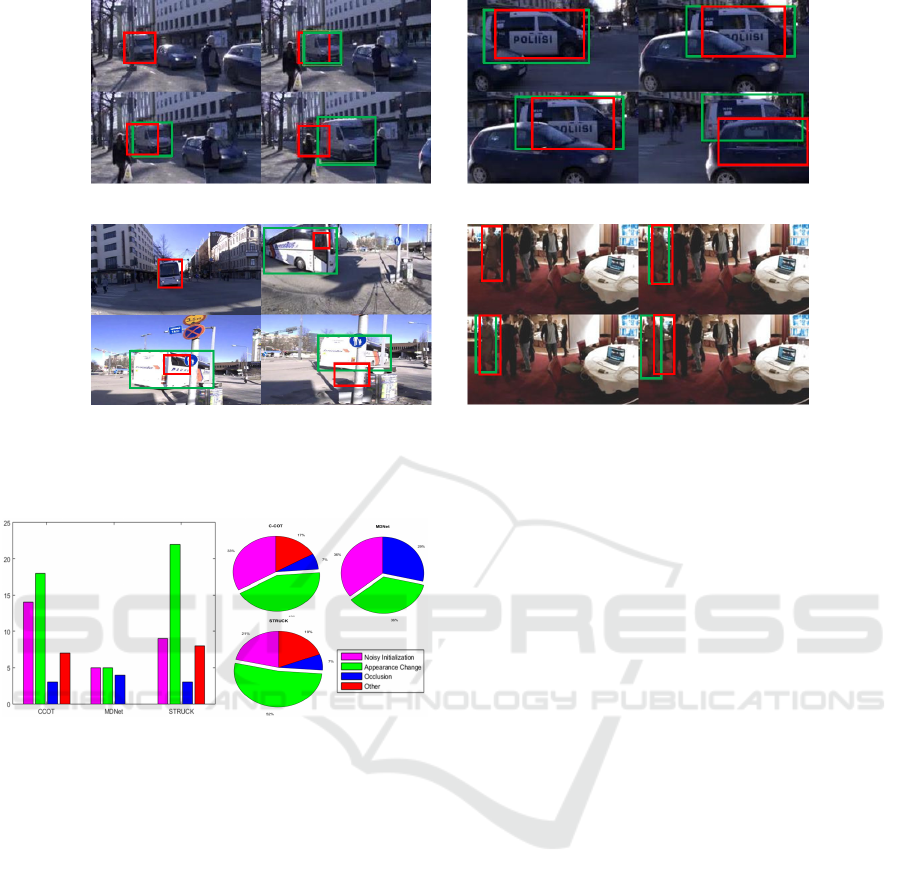
Figure 3: C-COT failures: (top left) the tracker bounding box was initialised to a region where the vehicle is occluded by
trees/posts resulting to a wrong model learned (noisy initiliasition); (top right) the police car is occluded by another vehicle
(occlusion); (bottom left) the bus is seen from the front, side and back view points with severe scale changes (appearance
change); (bottom right) other reason for a tracking failure.
Figure 4: Distribution of Failure Causes: a. Absolute Num-
bers for each tracker, b. CCOT - Ratio, c. MDNet - Ratio,
d. STRUCK - Ratio.
be too biased on finding the most similar appearance
patch in the next frame and cannot cope with rapid
view point changes due to 360
◦
spherical projection.
The online learning stage could be improved by incor-
porating information about the current spatial location
to the learning process.
5 CONCLUSION
We introduced a new, publicly available, high quality
360
◦
dataset for benchmarking visual object tracking
and detection methods. Our dataset consists of four
videos with densely annotated bounding box coordi-
nates for multiple objects in each video. We provide
both the original fisheye videos from eight OZO base
cameras and their geometric calibration data, and stit-
ched equirectangular (spherical) panorama videos. To
demonstrate the use of our data, we experimentally
evaluated several state-of-the-art methods for visual
object tracking and analysed the causes of tracking
failures. Despite C-COT was state-of-the-art, our ex-
periments showed that MDNet outperformed it with
large margins in especially human based categories.
As the most interesting experimental finding, large
apperance changes (scale and 3D view point) are the
most dominant source for tracking failures. These ap-
pearance changes are predominant for equirectangu-
lar panorama projection where appearance varies for
even a same view point depending on the 3D spatial
location of an object and a view point can drastically
change even for straight line trajectories. We believe
that better trackers for 360
◦
video can be implemen-
ted by adapting them for these special characteristics
of 360
◦
video and in our future work we will study
re-projections and view point based model updates to
improve the existing trackers.
ACKNOWLEDGEMENTS
We would like to thank Prof. Atanas Gotchev, Cen-
tre for Immersive Visual Technologies(CIVIT) and
Nokia Technologies for providing us with the neces-
sary equipment and assistance to capture our dataset.
REFERENCES
Carroll, R., Agrawala, M., and Agarwala, A. (2009). Op-
timizing Content-Preserving Projections for Wide-
Evaluation of Visual Object Trackers on Equirectangular Panorama
31

Angle Images. In SIGGRAPH.
Cehovin, L., Lukezic, A., Leonardis, A., and Kristan,
M. (2016). Beyond Standard Benchmarks: Para-
meterizing Performance Evaluation in Visual Object
Tracking.
Corbillon, X., Devlic, A., Simon, G., and Chakareski, J.
(2017). Viewport-Adaptive Navigable 360-degree Vi-
deo Delivery. In SIGGRAPH.
Danelljan, M., Robinson, A., Shahbaz Khan, F., and Fels-
berg, M. (2016). Beyond Correlation Filters: Le-
arning Continuous Convolution Operators for Visual
Tracking. ECCV 2016.
Ferryman, J. and Ellis, A. (2010). PETS2010: Dataset and
Challenge. Proceedings - IEEE International Confe-
rence on Advanced Video and Signal Based Surveil-
lance, AVSS 2010, pages 143–148.
Hare, S., Golodetz, S., Saffari, A., Vineet, V., Cheng,
M. M., Hicks, S. L., and Torr, P. H. S. (2016).
STRUCK: Structured Output Tracking with Kernels.
IEEE Transactions on Pattern Analysis and Machine
Intelligence, 38(10):2096–2109.
Held, D., Thrun, S., and Savarese, S. (2016). Learning to
Track at 100 FPS with Deep Regression Networks.
In Computer Vision and Pattern Recognition (CVPR),
2016 IEEE Conference on.
Henriques, J., Caseiro, R., Martins, P., and Batista, J.
(2014). High-Speed Tracking with Kernelized Cor-
relation Filters. Pattern Analysis and Machine Intelli-
gence, IEEE Transactions on, 37(3):1–14.
Kalal, Z., Mikolajczyk, K., and Matas, J. (2011). Tracking-
Learning-Detection. IEEE Transactions on Pattern
Analysis and Machine Intelligence, 34(7):1409–1422.
Kristan, M., Leonardis, A., Matas, J., Felsberg, M., Pflug-
felder, R., Cehovin, L., and Vojir, T. e. a. (2016a). The
Visual Object Tracking VOT2016 Challenge Results.
ECCV 2016 Workshops, pages 777–823.
Kristan, M., Matas, J., Leonardis, A., Felsberg, M., and Ce-
hovin, L. e. a. (2015). The Visual Object Tracking
VOT2015 Challenge Results. ICCV Workshop on Vi-
sual Object Tracking Challenge.
Kristan, M., Matas, J., Nebehay, G., Porikli, F., and Ce-
hovin, L. (2016b). A Novel Performance Evalua-
tion Methodology for Single-Target Trackers. IEEE
Transactions on Pattern Analysis and Machine Intel-
ligence, 38(11):2137–2155.
Kristan, M., Pflugfelder, R., Leonardis, A., Matas, J., Ce-
hovin, L., Nebehay, G., and Vojir, T. e. a. (2014). The
Visual Object Tracking VOT2014 Challenge Results.
ECCV Visual Object Tracking Challenge Workshop.
Nam, H. and Han, B. Learning Multi-Domain Convoluti-
onal Neural Networks for Visual Tracking. In Com-
puter Vision and Pattern Recognition (CVPR), 2016
IEEE Conference on.
Russakovsky, O., Deng, J., Su, H., Krause, J., Satheesh,
S., Ma, S., Huang, Z., Karpathy, A., Khosla, A.,
Bernstein, M., Berg, A. C., and Fei-Fei, L. (2015).
ImageNet Large Scale Visual Recognition Challenge.
International Journal of Computer Vision (IJCV),
115(3):211–252.
Smeulders, A. W. M., Chu, D. M., Cucchiara, R., Calde-
rara, S., Dehghan, A., and Shah, M. (2014). Visual
tracking: An experimental survey. IEEE Transacti-
ons on Pattern Analysis and Machine Intelligence,
36(7):1442–1468.
Su, Y.-C. and Grauman, K. (2017). Making 360 Video Wa-
tchable in 2D: Learning Videography for Click Free
Viewing. In Computer Vision and Pattern Recogni-
tion (CVPR), 2017 IEEE Conference on.
Su, Y.-C., Jayaraman, D., and Grauman, K. (2016).
Pano2Vid: Automatic Cinematography for Watching
360 Videos. In ACCV.
Vedaldi, A. and Lenc, K. (2015). MatConvNet – Convolu-
tional Neural Networks for MATLAB. In Proceeding
of the ACM Int. Conf. on Multimedia.
Wu, Y., Lim, J., and Yang, M. H. Online Object Tracking:
A Benchmark. In Computer Vision and Pattern Re-
cognition (CVPR), 2013 IEEE Conference on.
Xiao, J., Ehinger, K. A., Oliva, A., and Torralba, A. Recog-
nizing scene viewpoint using panoramic place repre-
sentation. Computer Vision and Pattern Recognition
(CVPR), 2012 IEEE Conference on.
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
32
