
Image Restoration using Autoencoding Priors
Siavash Arjomand Bigdeli
1
and Matthias Zwicker
1,2
1
University of Bern, Bern, Switzerland
2
University of Maryland, College Park, U.S.A.
Keywords:
Image Restoration, Denoising Autoencoders, Mean Shift.
Abstract:
We propose to leverage denoising autoencoder networks as priors to address image restoration problems. We
build on the key observation that the output of an optimal denoising autoencoder is a local mean of the true
data density, and the autoencoder error (the difference between the output and input of the trained autoencoder)
is a mean shift vector. We use the magnitude of this mean shift vector, that is, the distance to the local mean,
as the negative log likelihood of our natural image prior. For image restoration, we maximize the likelihood
using gradient descent by backpropagating the autoencoder error. A key advantage of our approach is that we
do not need to train separate networks for different image restoration tasks, such as non-blind deconvolution
with different kernels, or super-resolution at different magnification factors. We demonstrate state of the art
results for non-blind deconvolution and super-resolution using the same autoencoding prior.
1 INTRODUCTION
Deep learning has been successful recently at advan-
cing the state of the art in various low-level image re-
storation problems including image super-resolution,
deblurring, and denoising. The common approach to
solve these problems is to train a network end-to-end
for a specific task, that is, different networks need to
be trained for each noise level in denoising, or each
magnification factor in super-resolution. This makes
it hard to apply these techniques to related problems
such as non-blind deconvolution, where training a
network for each blur kernel would be impractical.
A standard strategy to approach image restora-
tion problems is to design suitable priors that can
successfully constrain these underdetermined pro-
blems. Classical techniques include priors based
on edge statistics, total variation, sparse representa-
tions, or patch-based priors. In contrast, our key
idea is to leverage denoising autoencoder (DAE) net-
works (Vincent et al., 2008) as natural image priors.
We build on the key observation by Alain et al. (Alain
and Bengio, 2014) that for each input, the output of
an optimal denoising autoencoder is a local mean of
the true natural image density. The weight function
that defines the local mean is equivalent to the noise
distribution used to train the DAE. Our insight is that
the autoencoder error, which is the difference between
the output and input of the trained autoencoder, is a
mean shift vector (Comaniciu and Meer, 2002), and
the noise distribution represents a mean shift kernel.
Hence, we leverage neural DAEs in an elegant
manner to define powerful image priors: Given the
trained autoencoder, our natural image prior is based
on the magnitude of the mean shift vector. For each
image, the mean shift is proportional to the gradient
of the true data distribution smoothed by the mean
shift kernel, and its magnitude is the distance to the
local mean in the distribution of natural images. With
an optimal DAE, the energy of our prior vanishes ex-
actly at the stationary points of the true data distribu-
tion smoothed by the mean shift kernel. This makes
our prior attractive for maximum a posteriori (MAP)
estimation.
For image restoration, we include a data term ba-
sed on the known image degradation model. For each
degraded input image, we maximize the likelihood of
our solution using gradient descent by backpropaga-
ting the autoencoder error and computing the gradient
of the data term. Intuitively, this means that our ap-
proach iteratively moves our solution closer to its lo-
cal mean in the natural image density, while satisfying
the data term. This is illustrated in Figure 1.
A key advantage of our approach is that we do not
need to train separate networks for different image re-
storation tasks, such as non-blind deconvolution with
different kernels, or super-resolution at different mag-
nification factors. Even though our autoencoding
Bigdeli, S. and Zwicker, M.
Image Restoration using Autoencoding Priors.
DOI: 10.5220/0006532100330044
In Proceedings of the 13th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2018) - Volume 5: VISAPP, pages
33-44
ISBN: 978-989-758-290-5
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
33

Blurry Iterations 10, 30, 100 and 250
23.12dB 24.17dB 26.43dB 29.1dB 29.9dB
Figure 1: We propose a natural image prior based on a de-
noising autoencoder, and apply it to image restoration pro-
blems like non-blind deblurring. The output of an optimal
denoising autoencoder is a local mean of the true natural
image density, and the autoencoder error is a mean shift
vector. We use the magnitude of the mean shift vector as
the negative log likelihood of our prior. To restore an image
from a known degradation, we use gradient descent to itera-
tively minimize the mean shift magnitude while respecting
a data term. Hence, step-by-step we shift our solution closer
to its local mean in the natural image distribution.
prior is trained on a denoising problem, it is highly ef-
fective at removing these different degradations. We
demonstrate state of the art results for non-blind de-
convolution and super-resolution using the same au-
toencoding prior.
In subsequent research, Bigdeli et al. (Bigdeli
et al., 2017) built on this work by incorporating our
proposed prior in a Bayes risk minimization frame-
work, which allows them to perform noise-blind re-
storation.
2 RELATED WORK
Image restoration, including deblurring, denoising,
and super-resolution, is an underdetermined problem
that needs to be constrained by effective priors to
obtain acceptable solutions. Without attempting to
give a complete list of all relevant contributions,
the most common successful techniques include pri-
ors based on edge statistics (Fattal, 2007; Tappen
et al., 2003), total variation (Perrone and Favaro,
2014), sparse representations (Aharon et al., 2006;
Yang et al., 2010), and patch-based priors (Zoran
and Weiss, 2011; Levin et al., 2012; Schmidt et al.,
2016a). While some of these techniques are tailored
for specific restoration problems, recent patch-based
priors lead to state of the art results for multiple ap-
plications, such as deblurring and denoising (Schmidt
et al., 2016a).
Solving image restoration problems using neu-
ral networks seems attractive because they allow for
straightforward end-to-end learning. This has led
to remarkable success for example for single image
super-resolution (Dong et al., 2014; Gu et al., 2015;
Dong et al., 2016; Liu et al., 2016; Kim et al., 2016)
and denoising (Burger et al., 2012; Mao et al., 2016).
A disadvantage of the end-to-end learning is that,
in principle, it requires training a different network
for each restoration task (e.g., each different noise
level or magnification factor). While a single net-
work can be effective for denoising different noise
levels (Mao et al., 2016), and similarly a single net-
work can perform well for different super-resolution
factors (Kim et al., 2016), it seems unlikely that in
non-blind deblurring, the same network would work
well for arbitrary blur kernels. Additionally, experi-
ments by Zhang et al. (Zhang et al., 2016) show that
training a network for multiple tasks reduces perfor-
mance compared to training each task on a separate
network. Previous research addressing non-blind de-
convolution using deep networks includes the work
by Schuler et al. (Schuler et al., 2013) and more re-
cently Xu et al. (Xu et al., 2014), but they require
end-to-end training for each blur kernel.
A key idea of our work is to train a neural au-
toencoder that we use as a prior for image restora-
tion. Autoencoders are typically used for unsuper-
vised representation learning (Vincent et al., 2010).
The focus of these techniques lies on the descriptive
strength of the learned representation, which can be
used to address classification problems for example.
In addition, generative models such as generative ad-
versarial networks (Goodfellow et al., 2014) or varia-
tional autoencoders (Kingma and Welling, 2014) also
facilitate sampling the representation to generate new
data. Their network architectures usually consist of
an encoder followed by a decoder, with a bottleneck
that is interpreted as the data representation in the
middle. The ability of autoencoders and generative
models to create images from abstract representations
makes them attractive for restoration problems. No-
tably, the encoder-decoder architecture in Mao et al.’s
image restoration work (Mao et al., 2016) is highly re-
miniscent of autoencoder architectures, although they
train their network in a supervised manner.
A denoising autoencoder (Vincent et al., 2008)
is an autoencoder trained to reconstruct data that
was corrupted with noise. Previously, Alain and
Bengio (Alain and Bengio, 2014) and Nguyen et
al. (Nguyen et al., 2016) used DAEs to construct ge-
nerative models. We are inspired by the observation
of Alain and Bengio that the output of an optimal
DAE is a local mean of the true data density. Hence,
our insight is that the autoencoder error (the diffe-
rence between its output and input) is a mean shift
vector (Comaniciu and Meer, 2002). This motivates
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
34

using the magnitude of the autoencoder error as our
prior.
Our work has an interesting connection to the
plug-and-play priors introduced by Venkatakrishnan
et al. (Venkatakrishnan et al., 2013). They solve re-
gularized inverse (image restoration) problems using
ADMM (alternating directions method of multi-
pliers), and they make the key observation that the
optimization step involving the prior is a denoising
problem, that can be solved with any standard denoi-
ser. Using this framework, CNN-based denoisers
have been employed (Zhang et al., 2017) for image
restoration. While their use of a denoiser is a conse-
quence of ADMM, our work shines a light on how a
trained denoiser is directly related to the underlying
data density (the distribution of natural images). Our
approach also leads to a different, simpler gradient
descent optimization that does not rely on ADMM.
In summary, the main contribution of our work
is that we make the connection between DAEs and
mean shift, which allows us to show the relation of an
optimal DAE to the underlying data distribution, and
to leverage DAEs to define a prior for image restora-
tion problems. We train a DAE and demonstrate that
the resulting prior is effective for different restoration
problems, including deblurring with arbitrary kernels
and super-resolution with different magnification fac-
tors.
3 PROBLEM FORMULATION
We formulate image restoration in a standard fashion
as a maximum a posteriori (MAP) problem (Joshi
et al., 2009). We model degradation including blur,
noise, and downsampling as
B = D(I ⊗K) + ξ, (1)
where B is the degraded image, D is a down-sampling
operator using point sampling, I is the unknown
image to be recovered, K is a known, shift-invariant
blur kernel, and ξ ∼ N (0,σ
2
d
) is the per-pixel i.i.d.
degradation noise. The posterior probability of the
unknown image is p(I|B) = p(B|I)p(I)/p(B), and we
maximize it by minimizing the corresponding nega-
tive log likelihoods L,
argmax
I
p(I|B) = argmin
I
[L(B|I) + L(I)]. (2)
Under the Gaussian noise model, the negative data log
likelihood is
L(B|I) = kB −D(I ⊗K)k
2
/σ
2
d
. (3)
Note that this implies that the blur kernel K is given at
the higher resolution, before down-sampling by point
(a) Spiral Manifold (b) Smoothed Density
and Observed Samples from Observed Samples
(c) Mean Shift Vectors (d) Mean Shift Vectors
Learned by DAE Approximated (Eq. 8)
Figure 2: Visualization of a denoising autoencoder using a
2D spiral density. Given input samples of a true density (a),
the autoencoder is trained to pull each sample corrupted by
noise back to its original location. Adding noise to the in-
put samples smooths the density represented by the samples
(b). Assuming an infinite number of input samples and an
autoencoder with unlimited capacity, for each input, the out-
put of the optimal trained autoencoder is the local mean of
the true density. The local weighting function corresponds
to the noise distribution that was used during training, and it
represents a mean shift kernel (Comaniciu and Meer, 2002).
The difference between the output and the input of the au-
toencoder is a mean shift vector (c), which vanishes at local
extrema of the true density smoothed by the mean shift ker-
nel. Due to practical limitations (Section 4.2), we approxi-
mate the mean shift vectors (d, red) using Equation 8. The
difference between the true mean shift vectors (d, black) and
our approximate vectors (d, red) vanishes as we get closer
to the manifold.
sampling with D. Our contribution now lies in a novel
image prior L(I), which we introduce next.
4 DENOISING AUTOENCODER
AS NATURAL IMAGE PRIOR
We will leverage a neural autoencoder to define a na-
tural image prior. In particular, we are building on
denoising autoencoders (DAE) (Vincent et al., 2008)
that are trained using Gaussian noise and an expected
quadratic loss. Inspired by the results by Alain et
al. (Alain and Bengio, 2014), we relate the optimal
DAE to the underlying data density and exploit this
relation to define our prior.
Image Restoration using Autoencoding Priors
35

4.1 Denoising Autoencoders
We visualize the intuition behind DAEs in Figure 2.
Let us denote a DAE as A
σ
η
. Given an input image I,
its output is an image A
σ
η
(I). A DAE A
σ
η
is trained
to minimize (Vincent et al., 2008)
L
DAE
= E
η,I
kI −A
σ
η
(I + η)k
2
, (4)
where the expectation is over all images I and Gaus-
sian noise η with variance σ
2
η
, and A
σ
η
indicates that
the DAE was trained with noise variance σ
2
η
. It is im-
portant to note that the noise variance σ
2
η
here is not
related to the degradation noise and its variance σ
2
d
,
and it is not a parameter to be learned. Instead,
it is a user specified parameter whose role becomes
clear with the following proposition. Let us denote
the true data density of natural images as p(I). Alain
et al. (Alain and Bengio, 2014) show that the output
A
σ
η
(I) of the optimal DAE (assuming unlimited capa-
city) is related to the true data density p(I) as
A
σ
η
(I) =
E
η
[p(I −η)(I −η)]
E
η
[p(I −η)]
=
R
g
σ
2
η
(η)p(I −η)(I −η)dη
R
g
σ
2
η
(η)p(I −η)dη
. (5)
This reveals an interesting connection to the mean
shift algorithm (Comaniciu and Meer, 2002):
Proposition 1. The autoencoder error, that is the dif-
ference between the output and the input of the au-
toencoder A
σ
η
(I) −I is an exact mean shift vector.
More precisely, the mean shift vector ((Comaniciu
and Meer, 2002), Eq. 17) is a Monte Carlo estimate of
Equation (5) using random samples ξ
i
∼ p,i = 1...n.
Proof. By substituting ξ = I −η in Equation (5), and
Monte Carlo estimation of the integrals with a sum
over n random samples ξ
i
∼ p, i = 1...n, we directly
arrive at the original mean shift formulation ((Coma-
niciu and Meer, 2002), Eq. 17).
The autoencoder output can be interpreted as a lo-
cal mean or a weighted average of images in the neig-
hborhood of I. The weights are given by the true den-
sity p(I) multiplied by the noise distribution that was
used during training, which is a local Gaussian kernel
g
σ
2
η
(η) centered at I with variance σ
2
η
. Hence the pa-
rameter σ
2
η
of the autoencoder determines the size of
the region around I that contributes to the local mean.
The key of our approach is the following theorem,
which we prove in the appendix:
Theorem 1. When the training noise η has a Gaus-
sian distribution, the autoencoder error is proporti-
onal to the gradient of the log likelihood of the data
Figure 3: Local minimum of our natural image prior. Star-
ting with a noisy image (left), we minimize the prior via
gradient descent (middle: intermediate step) to reach the
local minimum (right).
density p smoothed by the Gaussian kernel g
σ
2
η
(η),
A
σ
η
(I) −I = σ
2
η
∇log
h
g
σ
2
η
∗ p
i
(I), (6)
where ∗ means convolution.
Hence we observe that the autoencoder error va-
nishes at stationary points, including local extrema,
of the true density smoothed by the Gaussian kernel.
4.2 Autoencoding Prior
The above observations inspire us to use the squared
magnitude of the mean shift vector as the energy (the
negative log likelihood) of our prior, L(I) = kA
σ
η
(I)−
Ik
2
. This energy is very powerful because it tells
us how close an image I is to its local mean A
σ
η
(I)
in the true data density, and it vanishes at local ex-
trema of the true density smoothed by the mean shift
kernel. Figure 2(c), illustrates how small values of
L(I) = kA
σ
η
(I) − Ik
2
occur close to the data mani-
fold, as desired. Figure 3 visualizes a local minimum
of our prior on natural images, which we find by itera-
tively minimizing the prior via gradient descent star-
ting from a noisy input, without any help from a data
term.
Including the data term, we recover latent images
as
argmin
I
kB −D(I ⊗K)k
2
/σ
2
d
+ γkA
σ
η
(I) −Ik
2
. (7)
Our energy has two parameters that we will adjust ba-
sed on the restoration problem. First, this is the mean
shift kernel size σ
η
, and second we introduce a pa-
rameter γ to weight the relative influence of the data
term and the prior.
Optimization. Given a trained autoencoder, we mi-
nimize our loss function in Equation 7 by applying
gradient descent and computing the gradient of the
prior using backpropagation through the autoencoder.
Algorithm 1 shows the steps to minimize Equation 7.
In the first step of each iteration, we compute the gra-
dient of the data term with respect to image I. The
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
36
Algorithm 1 : Proposed gradient descent. We express
convolution as a matrix-vector product.
loop #iterations
• Compute data term gradients ∇
I
L(I|B):
K
T
D
T
(DKI −B)/σ
2
d
• Compute prior gradients ∇
I
L(I):
∇
I
A
σ
η
(I)
T
A
σ
η
(I) −I
+ I −A
σ
η
(I)
• Update I by descending
∇
I
L(I|B) + γ∇
I
L(I)
end loop
second step is to find the gradients for our prior. The
gradient of the mean shift vector kA
σ
η
(I) −Ik
2
re-
quires the gradient of the autoencoder A
σ
η
(I), which
we compute by backpropagation through the network.
Finally, the image I is updated using the weighted
sum of the two gradient terms.
Overcoming Training Limitations. The theory
above assumes unlimited data and time to train an un-
limited capacity autoencoder. In particular, to learn
the true mean shift mapping, for each natural image
the training data needs to include noise patterns that
lead to other natural images. In practice, however,
such patterns virtually never occur because of the high
dimensionality. Since the DAE never observed natu-
ral images during training (produced by adding noise
to other images), it overfits to noisy images. This is
problematic during the gradient descent optimization,
when the input to the DAE does not have noise.
As a workaround, we obtained better results by
adding noise to the image before feeding it to the trai-
ned DAE during optimization. We further justify this
by showing that with this workaround, we can still ap-
proximate a DAE that was trained with a desired noise
variance σ
2
η
. That is,
A
σ
η
(I) −I ≈ 2
E
ε
[A
σ
ε
(I −ε)] −I
, (8)
where ε ∼ N (0,σ
2
ε
), and A
σ
ε
is a DAE trained with
σ
2
ε
= σ
2
η
/2. The key point here is that the consecu-
tive convolution with two Gaussians is equivalent to
a single Gaussian convolution with the sum of the va-
riances (refer to supplementary material for the deri-
vation). This is visualized in Figure 2(d). The red
vectors indicate the approximated mean shift vectors
using Equation 8 and the black vectors indicate the
exact mean shift vectors. The approximation error de-
creases as we approach the true manifold.
During optimization, we approximate the ex-
pected value in Equation 8 by stochastically sampling
over ε. We use momentum of 0.9 and step size 0.1
in all experiments and we found that using one noise
sample per iteration performs well enough to com-
pute meaningful gradients. This approach resulted in
a PSNR gain of around 1.7dB for the super-resolution
task (Section 5.1), compared to evaluating the left
hand side of Equation 8 directly.
Bad Local Minima and Convergence. The mean
shift vector field learned by the DAE could vanish in
low density regions (Alain and Bengio, 2014), which
corresponds to undesired local minima for our prior.
In practice, however, we have not observed such de-
generate solutions because our data term pulls the so-
lution towards natural images. In all our experiments
the optimization converges smoothly (Figure 1, inter-
mediate steps), although we cannot give a theoretical
guarantee.
4.3 Autoencoder Architecture and
Training
Our network architecture is inspired by Zhang et
al. (Zhang et al., 2016). The network consists of
20 convolutional layers with batch normalization in
between except for the first and last layers, and we
use ReLU activations except for the last convolutio-
nal layer. The convolution kernels are of size 3 ×3
and the number of channels are 3 (RGB) for input
and output and 64 for the rest of the layers. Un-
like typical neural autoencoders, our network does
not have a bottleneck. An explicit latent space im-
plemented as a bottleneck is not required in principle
for DAE training, and we do not need it for our ap-
plication. We use a fully-convolutional network that
allows us to compute the gradients with respect to the
image more efficiently since the neuron activations
are shared between many pixels. Our network is trai-
ned on color images of the ImageNet dataset (Deng
et al., 2009) by adding Gaussian noise with standard
deviation σ
ε
= 25 (around 10%). We perform residual
learning by minimizing the L
2
distance of the output
layer to the ground truth noise. We used the Caffe
package (Jia et al., 2014) and employed an Adam sol-
ver (Kingma and Ba, 2014) with β
1
= 0.9, β
2
= 0.999
and learning rate of 0.001, which we reduced during
the iterations.
5 EXPERIMENTS AND RESULTS
We compare our approach, Denoising Autoenco-
der Prior (DAEP), to state of the art methods in
super-resolution and non-blind deconvolution pro-
Image Restoration using Autoencoding Priors
37

Ground Truth Bicubic SRCNN TNRD DnCNN-3 DAEP (Ours)
29.12 32.01 32.46 32.98 33.24
28.70 31.09 31.27 31.45 31.67
28.67 29.98 30.03 30.31 30.96
Figure 4: Comparison of super-resolution for scale factor 2 (top row), scale factor 3 (middle row), and scale factor 4 (bottom
row) with the corresponding PSNR (dB) scores.
blems. For all our experiments, we trained the au-
toencoder with σ
ε
= 25 (σ
η
= 25
√
2), and the pa-
rameter of our energy (Equation 7) were set to γ =
6.875/σ
2
η
. We always perform 300 gradient des-
cent iteration steps during image restoration . The
source code of the proposed method is available at
https://github.com/siavashbigdeli/DAEP.
5.1 Super-Resolution
The super-resolution problem is usually defined in
absence of noise (σ
d
= 0), therefore we weight the
prior by the inverse square root of the iteration num-
ber. This policy starts with a rough regularization
and reduces the prior weight in each iteration, lea-
ding to solutions that satisfy σ
d
= 0. We compare
our method to recent techniques by Kim et al. (Kim
et al., 2016) (SRCNN), Dong et al. (Dong et al., 2016)
(VDSR), Zhang et al. (Zhang et al., 2016) (DnCNN-
3), Chen and Pock (Chen and Pock, 2016) (TNRD),
and IRCNN by Zhang et al. (Zhang et al., 2017). SR-
CNN, VDSR and DnCNN-3 train an end-to-end net-
work by minimizing the L
2
loss between the output of
the network and the high-resolution ground truth, and
TNRD uses a learned reaction diffusion model. While
SRCNN and TNRD were trained separately for each
scale, the VDSR and DnCNN-3 models were trained
jointly on ×2,3 and 4 (DnCNN-3 training included
also denoising and JPEG artifact removal tasks). For
×5 super-resolution we used SRCNN and TNRD mo-
dels that were trained on ×4, and we used VDSR
and DnCNN-3 models trained jointly on ×2,3 and
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
38

Ground Truth Blurred Levin et al. EPLL RTF-6 DAEP (Ours)
22.05 30.88 32.69 32.82 33.64
19.47 28.22 29.65 21.82 30.68
Figure 5: Comparison of non-blind deconvolution with σ = 2.55 additive noise (top row) and σ = 7.65 additive noise (bottom
row) with the corresponding PSNR (dB) scores. The kernel is visualized in the bottom right of the blurred image.
4. Tables 1, 2 compare the average PSNR of the
super-resolved images from ’Set5’ and ’Set14’ data-
sets (Bevilacqua et al., 2012; Zeyde et al., 2012) for
scale factors ×2,3,4, and 5. We compute PSNR va-
lues over cropped RGB images (where the crop size
in pixels corresponds to the scale factor) for all met-
hods. For SRCNN, however, we used a boundary of
13 pixels to provide full support for their network.
While SRCNN, VDSR and DnCNN-3 solve directly
for MMSE, our method solves for the MAP solution,
which is not guaranteed to have better PSNR. Still,
we achieve better results in average. For scale fac-
tor ×5 our method performs significantly better since
our prior does not need to be trained for a speci-
fic scale. Figure 4 shows visual comparisons to the
super-resolution results from SRCNN (Dong et al.,
2016), TNRD (Chen and Pock, 2016), and DnCNN-
3 (Zhang et al., 2016) on three example images. We
exclude results of VDSR due to limited space and vi-
sual similarity with DnCNN-3. Our natural image
prior provides clean and sharp edges over all magni-
fication factors.
Table 1: Average PSNR (dB) for super-resolution on ’Set5’
(Bevilacqua et al., 2012).
Method ×2 ×3 ×4 ×5
Bicubic 31.80 28.67 26.73 25.32
SRCNN 34.50 30.84 28.60 26.12
TNRD 34.62 31.08 28.83 26.88
VDSR 34.50 31.39 29.19 25.91
DnCNN-3 35.20 31.58 29.30 26.30
IRCNN 35.07 31.26 29.01 27.13
DAEP (Ours) 35.23 31.44 29.01 27.19
Table 2: Average PSNR (dB) for super-resolution on
’Set14’ (Zeyde et al., 2012).
Method ×2 ×3 ×4 ×5
Bicubic 28.53 25.92 24.44 23.46
SRCNN 30.52 27.48 25.76 24.05
TNRD 30.53 27.60 25.92 24.61
VDSR 30.72 27.81 26.16 24.01
DnCNN-3 30.99 27.93 26.25 24.26
IRCNN 30.79 27.68 25.96 24.73
DAEP (Ours) 31.07 27.93 26.13 24.88
Image Restoration using Autoencoding Priors
39

(Lucy Richardson) (Zhou and Nayar, 2009) (Levin et al., 2007) (L
2
) (Wang et al., 2008) (L
1
) (Wang et al., 2008) (TV)
24.38/24.47 27.38/27.68 27.04/27.37 27.68/28.23 28.63/29.25
(Levin et al., 2007) (IRLS) (Shan et al., 2008) (Krishnan and Fergus, 2009) (Fortunato and Oliveira, 2014) DAEP (Ours)
28.96/30.15 28.97/30.01 29.15/30.18 29.25/30.34 29.92/31.07
Figure 6: Comparison of non-blind deconvolution methods on the 21st image from the Kodak image set (Kodak, 2013). For
each method, we report the PSNR (dB) of the visualized image (left) and the average PSNR on the whole set (right). The
results of other methods were reproduced from Fortunato and Oliveira (Fortunato and Oliveira, 2014) for ease of comparison.
Table 3: Average PSNR (dB) for non-blind deconvolution
on Levin et al.’s (Levin et al., 2007) dataset for different
noise levels.
Method 2.55 7.65 12.75 time(s)
Levin 31.09 27.40 25.36 3.09
EPLL 32.51 28.42 26.13 16.49
RTF-6 32.51 21.44 16.03 9.82
IRCNN 30.78 28.77 27.41 2.47
DAEP (Ours) 32.69 28.95 26.87 11.19
5.2 Non-Blind Deconvolution
To evaluate and compare our method for non-blind
deconvolution we used the dataset from Levin et
al. (Levin et al., 2007) with four grayscale images and
eight blur kernels in different sizes from 13 ×13 to
27 ×27. We compare our results to Levin et al. (Le-
vin et al., 2007) (Levin), Zoran and Weiss (Zoran and
Weiss, 2011) (EPLL), Schmidt et al. (Schmidt et al.,
2016b) (RTF-6), and IRCNN by Zhang et al. (Zhang
et al., 2017) in Table 3, where we show the average
PSNR of the deconvolution for three levels of addi-
tive noise (σ ∈ {2.55,7.65,12.75}). Note that RTF-
6 (Schmidt et al., 2016b) is only trained for noise le-
vel σ = 2.55, therefore it does not perform well for
other noise levels. Figure 5 provides visual compari-
sons for two deconvolution result images. Our natural
image prior achieves higher PSNR and produces shar-
per edges and less visual artifacts compared to Levin
et al. (Levin et al., 2007), Zoran and Weiss (Zoran
and Weiss, 2011), and Schmidt et al. (Schmidt et al.,
2016b). We report runtimes for different methods in
Table 3 for image size of 128x128 on an Nvidia Titan
X GPU. Our runtime is on par with popular methods
such as EPLL (Zoran and Weiss, 2011).
We performed an additional comparison on color
images similar to Fortunato and Oliveira (Fortunato
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
40

Masked 70% of Pixels Our Reconstruction Input with 10% Noise Our Reconstruction
6.13dB 30.68dB 20.47dB 31.05dB
Figure 7: Restoration of images corrupted by noise and holes using the same autoencoding prior as in our other experiments.
and Oliveira, 2014) using 24 color images from the
Kodak Lossless True Color Image Suite from Pho-
toCD PCD0992 (Kodak, 2013). The images are blur-
red with a 19×19 blur kernel from Krishnan and Fer-
gus (Krishnan and Fergus, 2009) and 1% noise is ad-
ded. Figure 6 shows visual comparisons and average
PSNRs over the whole dataset. Our method produces
much sharper results and achieves a higher PSNR in
average over this dataset.
5.3 Discussion
A disadvantage of our approach is that it requires the
solution of an optimization problem to restore each
image. In contrast, end-to-end trained networks per-
form image restoration in a single feed-forward pass.
For the increase in runtime computation, however,
we gain much flexibility. With a single autoenco-
ding prior, we obtain not only state of the art results
for non-blind deblurring with arbitrary blur kernels
and super-resolution with different magnification fac-
tors, but also successfully restore images corrupted by
noise or holes as shown in Figure 7.
Our approach requires some user defined parame-
ters (mean shift kernel size σ
η
for DAE training and
restoration, weight of the prior γ). While we use the
same parameters for all experiments reported here, ot-
her applications may require to adjust these parame-
ters. For example, we have experimented with image
denoising (Figure 7), but so far we have not achieved
state of the art results. We believe that this may re-
quire an adaptive kernel width for the DAE, and furt-
her fine-tuning of our parameters.
6 CONCLUSIONS
We introduced a natural image prior based on denoi-
sing autoencoders (DAEs). Our key observation is
that optimally trained DAEs provide mean shift vec-
tors on the true data density. Our prior minimizes the
distances of restored images to their local means (the
length of their mean shift vectors). This is powerful
since mean shift vectors vanish at local extrema of the
true density smoothed by the mean shift kernel. Our
results demonstrate that a single DAE prior achieves
state of the art results for non-blind image deblurring
with arbitrary blur kernels and image super-resolution
at different magnification factors. In the future, we
plan to apply our autoencoding priors to further image
restoration problems including denoising, coloriza-
tion, or non-uniform and blind deblurring. While we
used Gaussian noise to train our autoencoder, it is pos-
sible to use other types of data degradation for DAE
training. Hence, we will investigate other DAE degra-
dations to learn different data representations or use a
mixture of DAEs for the prior.
REFERENCES
Aharon, M., Elad, M., and Bruckstein, A. (2006). K-SVD:
An algorithm for designing overcomplete dictionaries
for sparse representation. IEEE Transactions on Sig-
nal Processing, 54(11):4311–4322.
Alain, G. and Bengio, Y. (2014). What regularized auto-
encoders learn from the data-generating distribution.
Journal of Machine Learning Research, 15:3743–
3773.
Bevilacqua, M., Roumy, A., Guillemot, C., and Alberi-
Morel, M. (2012). Low-complexity single-image
super-resolution based on nonnegative neighbor em-
bedding. In British Machine Vision Conference,
BMVC 2012, Surrey, UK, September 3-7, 2012, pages
1–10.
Bigdeli, S. A., Jin, M., Favaro, P., and Zwicker, M. (2017).
Deep mean-shift priors for image restoration. In NIPS
(to appear).
Burger, H. C., Schuler, C. J., and Harmeling, S. (2012).
Image denoising: Can plain neural networks compete
with BM3D? In Computer Vision and Pattern Re-
cognition (CVPR), 2012 IEEE Conference on, pages
2392–2399.
Image Restoration using Autoencoding Priors
41

Chen, Y. and Pock, T. (2016). Trainable nonlinear reaction
diffusion: A flexible framework for fast and effective
image restoration. IEEE Transactions on Pattern Ana-
lysis and Machine Intelligence.
Comaniciu, D. and Meer, P. (2002). Mean shift: a ro-
bust approach toward feature space analysis. IEEE
Transactions on Pattern Analysis and Machine Intel-
ligence, 24(5):603–619.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-Fei,
L. (2009). Imagenet: A large-scale hierarchical image
database. In Computer Vision and Pattern Recogni-
tion, 2009. CVPR 2009. IEEE Conference on, pages
248–255. IEEE.
Dong, C., Loy, C. C., He, K., and Tang, X. (2014). Lear-
ning a Deep Convolutional Network for Image Super-
Resolution, pages 184–199. Springer International
Publishing, Cham.
Dong, C., Loy, C. C., He, K., and Tang, X. (2016). Image
super-resolution using deep convolutional networks.
IEEE Transactions on Pattern Analysis and Machine
Intelligence, 38(2):295–307.
Fattal, R. (2007). Image upsampling via imposed edge sta-
tistics. ACM Trans. Graph., 26(3).
Fortunato, H. E. and Oliveira, M. M. (2014). Fast high-
quality non-blind deconvolution using sparse adaptive
priors. The Visual Computer, 30(6-8):661–671.
Goodfellow, I., Pouget-Abadie, J., Mirza, M., Xu, B.,
Warde-Farley, D., Ozair, S., Courville, A., and Ben-
gio, Y. (2014). Generative adversarial nets. In Ghahra-
mani, Z., Welling, M., Cortes, C., Lawrence, N. D.,
and Weinberger, K. Q., editors, Advances in Neu-
ral Information Processing Systems 27, pages 2672–
2680. Curran Associates, Inc.
Gu, S., Zuo, W., Xie, Q., Meng, D., Feng, X., and Zhang, L.
(2015). Convolutional sparse coding for image super-
resolution. In 2015 IEEE International Conference on
Computer Vision (ICCV), pages 1823–1831.
Jia, Y., Shelhamer, E., Donahue, J., Karayev, S., Long, J.,
Girshick, R., Guadarrama, S., and Darrell, T. (2014).
Caffe: Convolutional architecture for fast feature em-
bedding. In Proceedings of the 22nd ACM internatio-
nal conference on Multimedia, pages 675–678. ACM.
Joshi, N., Zitnick, C. L., Szeliski, R., and Kriegman, D. J.
(2009). Image deblurring and denoising using color
priors. In Computer Vision and Pattern Recognition,
2009. CVPR 2009. IEEE Conference on, pages 1550–
1557.
Kim, J., Kwon Lee, J., and Mu Lee, K. (2016). Accurate
image super-resolution using very deep convolutional
networks. In The IEEE Conference on Computer Vi-
sion and Pattern Recognition (CVPR).
Kingma, D. and Ba, J. (2014). Adam: A method for sto-
chastic optimization. arXiv preprint arXiv:1412.6980.
Kingma, D. P. and Welling, M. (2014). Auto-encoding va-
riational bayes. In ICLR 2014.
Kodak (2013). Kodak lossless true color image suite.
http://r0k.us/graphics/kodak/. Accessed: 2013-01-27.
Krishnan, D. and Fergus, R. (2009). Fast image deconvo-
lution using hyper-laplacian priors. In Advances in
Neural Information Processing Systems, pages 1033–
1041.
Levin, A., Fergus, R., Durand, F., and Freeman, W. T.
(2007). Image and depth from a conventional camera
with a coded aperture. ACM transactions on graphics
(TOG), 26(3):70.
Levin, A., Nadler, B., Durand, F., and Freeman, W. T.
(2012). Patch Complexity, Finite Pixel Correlations
and Optimal Denoising, pages 73–86. Springer Ber-
lin Heidelberg, Berlin, Heidelberg.
Liu, D., Wang, Z., Wen, B., Yang, J., Han, W., and Huang,
T. S. (2016). Robust single image super-resolution via
deep networks with sparse prior. IEEE Transactions
on Image Processing, 25(7):3194–3207.
Mao, X.-J., Shen, C., and Yang, Y.-B. (2016). Image resto-
ration using very deep convolutional encoder-decoder
networks with symmetric skip connections. In Proc.
Neural Information Processing Systems.
Nguyen, A., Yosinski, J., Bengio, Y., Dosovitskiy, A., and
Clune, J. (2016). Plug & play generative networks:
Conditional iterative generation of images in latent
space. arXiv preprint arXiv:1612.00005.
Perrone, D. and Favaro, P. (2014). Total variation blind de-
convolution: The devil is in the details. In 2014 IEEE
Conference on Computer Vision and Pattern Recogni-
tion, pages 2909–2916.
Schmidt, U., Jancsary, J., Nowozin, S., Roth, S., and Rot-
her, C. (2016a). Cascades of regression tree fields for
image restoration. IEEE Transactions on Pattern Ana-
lysis and Machine Intelligence, 38(4):677–689.
Schmidt, U., Jancsary, J., Nowozin, S., Roth, S., and Rot-
her, C. (2016b). Cascades of regression tree fields for
image restoration. IEEE transactions on pattern ana-
lysis and machine intelligence, 38(4):677–689.
Schuler, C. J., Burger, H. C., Harmeling, S., and Schlkopf,
B. (2013). A machine learning approach for non-blind
image deconvolution. In Computer Vision and Pattern
Recognition (CVPR), 2013 IEEE Conference on, pa-
ges 1067–1074.
Shan, Q., Jia, J., and Agarwala, A. (2008). High-quality
motion deblurring from a single image. In ACM Tran-
sactions on Graphics (TOG), volume 27, page 73.
ACM.
Tappen, M. F., Russell, B. C., and Freeman, W. T.
(2003). Exploiting the sparse derivative prior for
super-resolution and image demosaicing. In In IEEE
Workshop on Statistical and Computational Theories
of Vision.
Venkatakrishnan, S. V., Bouman, C. A., and Wohlberg, B.
(2013). Plug-and-play priors for model based recon-
struction. In GlobalSIP, pages 945–948. IEEE.
Vincent, P., Larochelle, H., Bengio, Y., and Manzagol, P.-
A. (2008). Extracting and composing robust features
with denoising autoencoders. In Proceedings of the
25th International Conference on Machine Learning,
ICML ’08, pages 1096–1103, New York, NY, USA.
ACM.
Vincent, P., Larochelle, H., Lajoie, I., Bengio, Y., and
Manzagol, P.-A. (2010). Stacked denoising autoen-
coders: Learning useful representations in a deep net-
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
42

work with a local denoising criterion. J. Mach. Learn.
Res., 11:3371–3408.
Wang, Y., Yang, J., Yin, W., and Zhang, Y. (2008). A
new alternating minimization algorithm for total vari-
ation image reconstruction. SIAM Journal on Imaging
Sciences, 1(3):248–272.
Xu, L., Ren, J. S., Liu, C., and Jia, J. (2014). Deep
convolutional neural network for image deconvolu-
tion. In Ghahramani, Z., Welling, M., Cortes, C., La-
wrence, N. D., and Weinberger, K. Q., editors, Ad-
vances in Neural Information Processing Systems 27,
pages 1790–1798. Curran Associates, Inc.
Yang, J., Wright, J., Huang, T. S., and Ma, Y. (2010). Image
super-resolution via sparse representation. IEEE Tran-
sactions on Image Processing, 19(11):2861–2873.
Zeyde, R., Elad, M., and Protter, M. (2012). On single
image scale-up using sparse-representations. In Pro-
ceedings of the 7th International Conference on Cur-
ves and Surfaces, pages 711–730, Berlin, Heidelberg.
Springer-Verlag.
Zhang, K., Zuo, W., Chen, Y., Meng, D., and Zhang, L.
(2016). Beyond a gaussian denoiser: Residual lear-
ning of deep cnn for image denoising. arXiv preprint
arXiv:1608.03981.
Zhang, K., Zuo, W., Gu, S., and Zhang, L. (2017). Learning
deep cnn denoiser prior for image restoration. arXiv
preprint arXiv:1704.03264.
Zhou, C. and Nayar, S. (2009). What are good apertures for
defocus deblurring? In Computational Photography
(ICCP), 2009 IEEE International Conference on, pa-
ges 1–8. IEEE.
Zoran, D. and Weiss, Y. (2011). From learning models of
natural image patches to whole image restoration. In
2011 International Conference on Computer Vision,
pages 479–486.
APPENDIX
OPTIMAL DAE WITH GAUSSIAN
NOISE, THEOREM 1
Here we provide the derivation for Equation 6 in The-
orem 1.
Proof. We first rewrite the original equation for the
DAE (Alain and Bengio (Alain and Bengio, 2014)
and our Equation 5) as
A
σ
η
(I) =
E
η
[p(I −η)(I −η)]
E
η
[p(I −η)]
= I −
E
η
[p(I −η)η]
E
η
[p(I −η)]
,η ∼ N (0,σ
2
η
).
By expanding the numerator in the quotient we get
E
η
[p(I −η)η] =
Z
g
σ
2
η
(η)p(I −η)ηdη
= −σ
2
η
Z
∇g
σ
2
η
(η)p(I −η)dη,
where we used the definition of the derivative of the
Gaussian to remove η inside the integral. Now we
can use the Leibniz rule to interchange the ∇ operator
with the integral and we get
E
η
[p(I −η)η] = −σ
2
η
∇E
η
[p(I −η)].
Plugging this back into our equation for the DAE we
get
A
σ
η
(I) = I + σ
2
η
∇E
η
[p(I −η)]
E
η
[p(I −η)]
,
and using the derivative of the logarithm we see that
this is
A
σ
η
(I) = I + σ
2
η
∇logE
η
[p(I −η)]
= I + σ
2
η
∇log[g
σ
2
η
∗ p](I)
as in Equation 6.
With this alternative formulation of the DAEs we
have removed the normalization term in the denomi-
nator of the DAE definition. This result shows that
the autoencoder error (that is, the mean shift vector)
corresponds to the gradient of the log-likelihood of
the distribution blurred with a Gaussian kernel with
variance σ
2
η
.
APPROXIMATION OF THE DAE
Here we would like to show that it is possible to ap-
proximate a DAE with another trained DAE by adding
extra noise to its input, and computing the expectation
of the output of this DAE over the added noise. Speci-
fically, we can approximate DAE A
σ
η
with bandwidth
σ
η
, by another DAE A
σ
τ
with bandwidth and σ
τ
≤σ
η
by computing
A
σ
η
(I) −I ≈
σ
2
η
σ
2
τ
E
ε
[A
σ
τ
(I −ε)] −I
,
where ε ∼ N (0, σ
2
η
−σ
2
τ
). In our approach, we eva-
luate (the gradient of the squared magnitude of) this
equation at run-time during image restoration by sam-
pling the expected value on the right hand side using
a single sample in each step of the gradient descent
optimization.
Image Restoration using Autoencoding Priors
43
To derive the above approximation, we start by
using the alternative equation of the DAE from Equa-
tion 6 for A
σ
τ
to write
A
σ
τ
(I) −I = σ
2
τ
∇logE
τ
[p(I −τ)],
and we take expectations of both sides over noise va-
riable ε, that is
E
ε
[A
σ
τ
(I −ε)] −I = σ
2
τ
∇E
ε
[logE
τ
[p(I −τ −ε)]] ,
where we used the Leibniz rule to interchange the ∇
operator with the expectation. Now we would like to
move the expectation over ε inside the log. For this we
perform a first order Taylor approximation of the log
around E
ε
[E
τ
[p(I −τ −ε)]] and replace the equality
sign with approximation, which gives us
E
ε
[A
σ
τ
(I −ε)] −I ≈ σ
2
τ
∇logE
ε
[E
τ
[p(I −τ −ε)]] .
Now we use the fact that consecutive convolution of
the density by Gaussian kernels with bandwidths σ
2
ε
and σ
2
τ
is identical to a single convolution by a Gaus-
sian kernel with bandwidth σ
2
η
= σ
2
ε
+ σ
2
τ
, that is
E
ε
[A
σ
τ
(I −ε)] −I ≈ σ
2
τ
∇logE
η
[p(I −η)].
We now use Equation 6 to rewrite this as
E
ε
[A
σ
τ
(I −ε)] −I ≈
σ
2
τ
σ
2
η
A
σ
η
(I) −I
,
which is the result we wanted. In the paper, we use
the specific case where σ
2
τ
= σ
2
ε
=
1
2
σ
2
η
, which leads
to Equation 8.
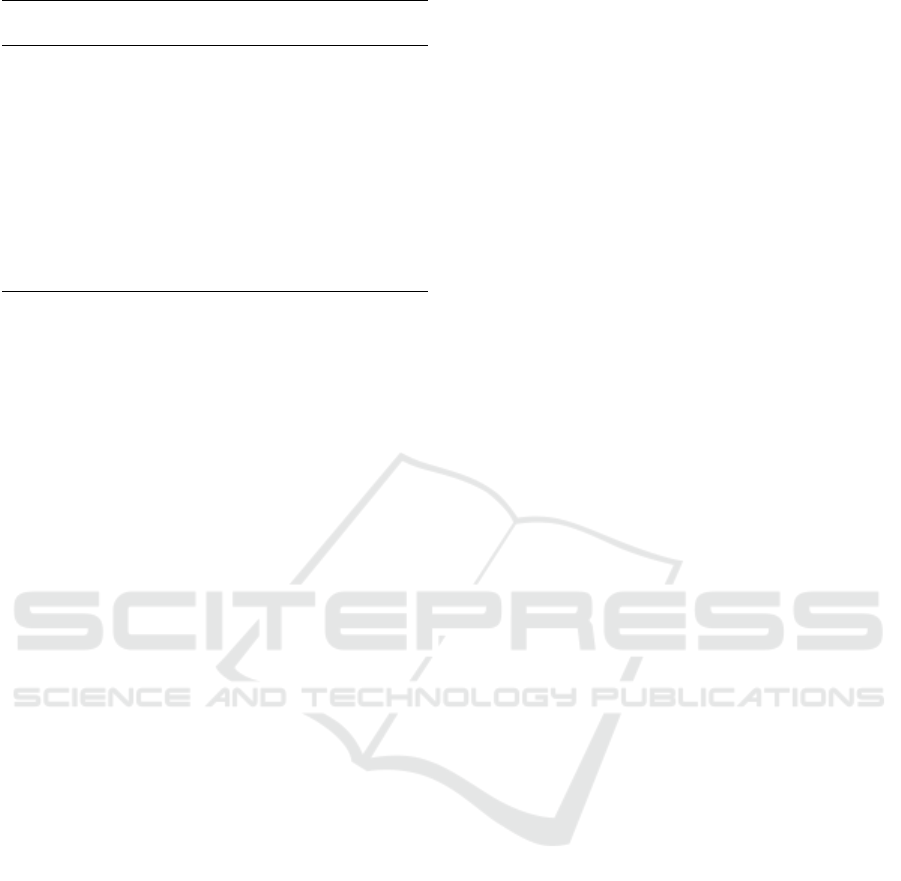
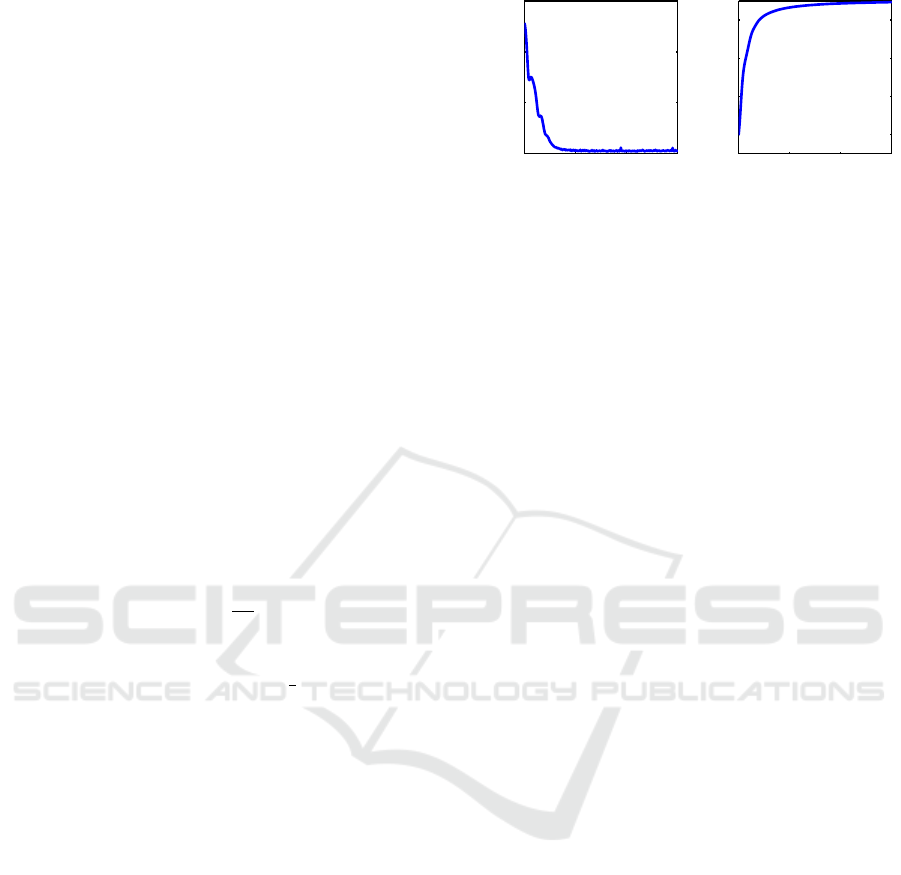
CONVERGENCE OF OUR
STOCHASTIC GRADIENT
DESCENT
We show the convergence of our algorithm for a sin-
gle image deblurring example in Figure 8. By using
a momentum in our stochastic gradient descent, we
are able to avoid oscillations and our reconstruction
converges smoothly to the solution.
10
12
14
16
Iterations
Error (Log)
18
20
22
24
Iterations
PSNR (dB)
Iterations Iterations
100 200 300 100 200 300
Figure 8: Convergence results of our stochastic objective
error (left) and reconstruction PSNR (right) during the ite-
rations.
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
44
