
Computer Vision based System for Apple Detection in Crops
Mercedes Marzoa Tanco, Gonzalo Tejera and J. Mat
´
ıas Di Martino
Facultad de Ingenier
´
ıa, Universidad de la Rep
´
ublica, J. Herrera y Reissig 565, Montevideo, Uruguay
Keywords:
Apple Detection, Image Processing, Fruit Recognition.
Abstract:
In recent times there has been an increasing need to improve apple production competitiveness. The automatic
estimation of the crop yield or the automatic collection may contribute to this improvement. This article
proposes a simple and efficient approach to automatically detect the apples present on a given set of images.
We tested the proposed algorithm on several images taken on many different apple crops under natural lighting
conditions. The proposed method has two main steps. First we implement a classification step in which each
pixel is classified as part of an apple (positive pixel) or as part of the background (negative pixel). Then, a
second step explore the morphology of the set of positive pixels, to detect the most likely configuration of
circular structures. We compare the performance of methods such as: Support Vector Machine, k-Nearest
Neighbor and a basic Decision Tree on the classification step. A database with 266 high resolution images
was created and made publicly available. This database was manually labeled and we provide for each image,
a label (positive or negative) for each pixel, plus the location of the center of each apple.
1 INTRODUCTION
Currently there is an increasing need to obtain higher
quality products at a lesser cost, thus increasing com-
petitiveness. Developing automatic systems to enable
the use of human resources more efficiently in terms
of precision, repeatability or time consumed is a good
alternative. Also, estimating crops yield helps pro-
ducers improve the quality of their fruit and reduce
operation costs. Managers can use estimation results
to plan the optimal capacity for packaging and storage
(Robinson, 2006). As an example, the cost of harves-
ting citrus fully by hand may range from 25% to 33%
of the total cost of production (Dougherty and Lotufo,
2003).
The overall objective of this article is to intro-
duce an automated computer vision system for the de-
tection and counting of red apples in trees. The pre-
sent work is part of the design of a more complex sy-
stem for the automatic estimation of crops yield and
harvesting.
In order to detect pixels belonging to apples, three
techniques are evaluated: Support Vector Machines
(SVM), K-Nearest Neighbors (k-NN) and a very sim-
ple decision tree (DT). As an improvement to the out-
come of pixel detection, morphology operations have
been used. In order to detect the apples themselves,
and given their shape, the Hough transform for circles
has been used. Finally, a post-processing of the circles
found is made, to rule out false positives detections.
2 RELATED WORK
There are several works on the detection of fruit using
computer vision techniques.
There are two great approaches to the estima-
tion of a crop yield, one is counting the apples and
the other is doing the estimation through flower den-
sity. Several researchers have worked in the first cate-
gory using color images (Linker et al., 2012),(Rakun
et al., 2011),(Tabb et al., 2006), hyperspectral ima-
ging (Safren et al., 2007), and thermal imaging (Sta-
jnko et al., 2004). Aggelopoulou et al. (Aggelopoulou
et al., 2011) worked on the second category, sampled
images of trees in an apple orchard and found a cor-
relation between flower density and crop yield. Ho-
wever, this method encounters a problem: the period
between the flowering and the crop is too long and
there are multiple unpredictable factors, such as we-
ather conditions, which make the correlation exposed
to variations from one year to the next.
Counting apples using computer vision puts for-
ward several challenges, the most important of which
being the variation of natural light, the occlusion of
fruits due to foliage, branches and other fruits and the
Tanco, M., Tejera, G. and Martino, M.
Computer Vision based System for Apple Detection in Crops.
DOI: 10.5220/0006535002390249
In Proceedings of the 13th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2018) - Volume 4: VISAPP, pages
239-249
ISBN: 978-989-758-290-5
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
239

detection of one same apple in several images. Follo-
wing are the techniques used by different authors to
elude these challenges.
Wang et al. (Wang et al., 2013) present one way
to avoid the variation of light by acquiring images at
night with artificial illumination. The solution given
by Jimenez et al. (Jim
´
enez et al., 1999) to the occlu-
sion is a post-processing of the images using Hough
transforms with ellipses. Finally, for the challenge of
multiple detections of the same apple in a sequence
of images, Wang et al. (Wang et al., 2013) propose
the use of a pair of stereo cameras to estimate the po-
sition of the apples and rule out those that coincide.
A computer vision algorithm detects and registers ap-
ples that appear in sequential images and then counts
them for the estimation. They had good results both
in red and green apples and they make a full study
of cases with results according to the type of cut of
the trees, quantity of spots in the apples, accumula-
tion of apples and occluded environments. Specifi-
cally, they carry out the identification of red apples by
the following stages: through a hue threshold (H) and
a saturation threshold (S), the pixels complying with
the apples characteristics are detected and then, the
apples are segmented individually using morphology
operations. Finally, they look for the global position
of the apple, thus avoiding to count it more than once.
Gongal et al. (Gongal et al., 2016a) proposed a si-
milar approach, were in addition to a pair of stereo
images, a tunnel structure has build to minimize na-
tural illumination effect which enable to reduced the
variability in lighting condition. Images captured in a
tall spindle orchard were processed. Zhao et al. (Zhao
et al., 2005) present a method to identify apples using
a single RGB image under natural illumination as in-
put. To that end, they first define a redness measure
as r = 3R − (G + B), where R, G and B represent the
red, green and blue values respectively of each pixel,
then they apply morphological operations and finally
an edge detection final step. Ji et al. (Ji et al., 2012)
use the same kind of input RGB images as the previ-
ous work, and apply a median filter to eliminate the
noise followed by a classification step in which they
use SVM algorithm on a color plus shape space. Ji-
menez et al. (Jim
´
enez et al., 1999) propose an auto-
matic fruit recognition system and present a schema-
tic review of the works developed until the end of the
nineties. Their fruit detection methodology is able to
recognize spherical fruits in natural conditions using
a laser range finder which provide range/attenuation
data of the sensed surfaces. Their recognition system
uses a laser range finder model and a dual color/shape
analysis algorithm to locate the fruits.
The work presented by Wang et al. (Wang et al.,
2013) is likely the closest work to the present arti-
cle. However, significant differences exist between
this work and the present article. In first place Wang
et al. propose a system that uses a two-camera ste-
reo rig for image acquisition and works at nighttime
with controlled artificial lighting to reduce the vari-
ance of natural illumination. While we work in am-
bient uncontrolled illumination conditions and use a
single RGB camera. In addition, from the point of
view of the numerical methods presented, we extend
Wang et al. approach by including more advanced
machine learning techniques and by facing apple de-
tection problem in the context of an imbalanced pro-
blem (Barandela et al., 2003; Japkowicz and Stephen,
2002; Liu et al., 2009).
The main contributions of the present work are:
(i) We improve previous approaches by the use of
more robust machine learning techniques. In parti-
cular, by facing the pixels classification problem as a
pattern recognition imbalanced problem. (ii) We pre-
sent an updated review of the current state of the art.
(iii) A database with 266 high resolution images was
created and made publicly available (Marzoa, 2017a)
.This database was manually labeled and we provide
for each image, a label (positive or negative) for each
pixel, plus the location of the center of each apple. To
the best of our knowledge is the first publicly availa-
ble database with such characteristics.
3 PROPOSED SOLUTION
This section describe the methods used to solve the
problem posed. The methodology applied can be se-
parated in three stages: construction of the database,
classification of the pixels in apple or background and
identification of the apples themselves.
3.1 Construction of the Database
The database is formed by 266 images acquired using
natural light, at “Las Brujas - INIA” experimental sta-
tion located in Canelones, Uruguay. Each image has
an associated binary image where it is indicated, in
white, whether the pixel belongs to an apple, or in
black, if not. In its turn, there is a file per image with
the coordinates of each apple’s center. The data base
is available for future works (Marzoa, 2017a).
3.2 Classification of Pixels in Apple or
Background
To classify the apple pixels, a classic pattern recogni-
tion pipeline was followed. First a set of discrimina-
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
240

tive features is proposed to map the input RGB pixels
to a more suitable feature space. Then, different clas-
sifiers are trained and evaluated.
3.2.1 Feature Extraction
To describe those pixels that belong to an apple and
those that belong to the background we use three ba-
sic features: Hue (H), Saturation (S), and a simple
Texture descriptor.
Hue and Saturation. Apples have a reddish tonality
which is different from almost all the other objects
in a crop; therefore, tonality is a good differentiating
characteristic.
In order to have robust representation of pixels un-
der different illumination conditions, the input color
space RGB is mapped into the HSV (Hue, Satura-
tion, and Value) color space (Manjunath et al., 2001).
The Hue and Saturation values are directly related to
the color perceived of the pixels, while the Value is
mainly related to the lightness of the scene.
The ranges of values of H with which better re-
sults are obtained were determined for each techni-
que used. Tonality H is not defined for white, gray
or black, that is why saturation, has to be used to ex-
clude them. Figure 1(a) illustrates a test image of the
database, Figure 1(b) show the result of segmenting
the test image according to its values of H and Figure
1(c) show the result of segmenting using both H and
S.
(a) Input image (b) After Hue
segmentation
(c) After Hue
and Saturation
segmentation
Figure 1: Example of segmenting a test image using diffe-
rent features.
Texture Descriptor. Another visible characteristic is
that apples have less edges in their surface than grass,
leaves or trunks. An edge may be seen as the place
where the intensity of pixels changes dramatically (or
noticeably), and this is obtained through partial deri-
vatives. A large change in a gradient means a large
change in the image. A method to detect edges in an
image is then to place the pixels where the gradient is
larger than the neighbors or, to generalize, where it is
larger than a certain threshold.
In the present work, the Sobel operator (Szeliski,
2010) is used to estimate the gradient of the intensity
for a given image. For each pixel, the operator gives
the magnitude and the direction of the larger possible
change.
Mathematically, two square n ×n kernels are defi-
ned, G
x
and G
y
. Then, the continuous spatial deriva-
tives are numerically approximated as,
∂I
∂x
≈ G
x
∗ I and
∂I
∂y
≈ G
y
∗ I (1)
where ∗ denotes the two dimensional convolution
operation.
Kernels G
x
and G
y
are defined as,
G
x
=
1 0 1
−2 0 2
−1 0 1
, G
y
=
1 −2 −1
0 0 0
1 2 1
(2)
For each pixel of the image, an approximation of
the gradient at the said point is estimated as,
|∇I| =
s
∂I
∂x
2
+
∂I
∂y
2
=
q
(G
x
∗ I)
2
+ (G
y
∗ I)
2
. (3)
Finally, edges can be defined as the set of pixels
{x : |∇I(x)| > τ} for a given threshold τ. By represen-
ting the edges with pixels in white, in figure 2 the ef-
fect of applying Sobel filter to an image may be seen.
Specifically, it may be observed how, while apples ba-
rely exhibit edges in their surface, leaves and the grass
do.
(a) Input image (b) Edgedes after aplying
Sobel
Figure 2: Example of image after apply Sobel.
Algorithm 1 summarizes the main steps of the fe-
ature representation step.
Notation. The features space defined for this pro-
blem is a three dimensional space where each pixel
sample will be represented by a feature vector x =
(h,s,td)
T
∈ R
3
, h and s correspond to the featu-
res associated to the hue and saturation respectively,
while td denotes the “texture descriptor” obtained
from image’s gradient. Those pixels label as belon-
ging to an apple, will be refer as positive while pixels
associated to the background will be refer as negative.
Numerical label 1 and −1 will be associated to
Computer Vision based System for Apple Detection in Crops
241

Algorithm 1: Features of an image.
Input : RGB image I : H ×W × 3 matrix
Output: 3D matrix X : H ×W × 3 // Hue,
Saturation, and Texture
Descriptor for each pixel.
// Map RGB space to HSV space
1 I
HSV
= rgb2hsv(I)
2 X(:,:,1) = I
HSV
(:,:,1)
3 X(:,:,2) = I
HSV
(:,:, 2)
// Define Sobel kernels (2)
4 (G
x
,G
y
) = define sobel kernels()
// Convert RGB to a gray image
5 I ← rgb2gray(I) // Compute im.
gradient modulus
6 I ←
p
(I ∗ G
x
)
2
+ (I ∗G
y
)
2
// Local gradient descriptor
7 X(:,:,3) = I
8 return X
positive and negative classes respectively. A true po-
sitive/negative pixel will be a positive/negative pixel
correctly classified, while a false positive/negative re-
sult will be a negative/positive sample misclassified.
3.2.2 Performance Measurement
Let us recall some well known performance measu-
rements widely applied in the context of imbalanced
problems (Di Martino et al., 2012; Di Martino et al.,
2013b; Di Martino et al., 2013a; Kubat et al., 1997;
Barandela et al., 2003; Garc
´
ıa et al., 2012). Given
T P, T N, FP and FN as the number of true posi-
tive, true negative, false positive and false negative
respectively, we define,
Accuracy: A =
T P+T N
T P+T N+FP+FN
(4)
Recall: R =
T P
T P+FN
(5)
Precision: P =
T P
T P+FP
(6)
F-measure: F
m
=
R P
P +R
(7)
Accuracy (or equivalently the error rate) is one of
the most popular measures used to define optimality
in pattern recognition problems. However in the con-
text of highly imbalanced problems is not an adequate
way of measuring and comparing different strategies
performance. Let illustrate this point with a simple
example. If just the 1% of the pixels of a set of images
corresponds to pixels that belongs to an apple, we can
design a trivial algorithm that classifies all the pixels
as part of the background, i.e. the output label of this
method is always −1. This approach will achieve an
accuracy of 99% while non a single pixel nor a single
apple will be detected. Precision and Recall are two
important measures to evaluate the performance of a
given classifier in an imbalance scenario. The Recall
indicates the True Positive Rate, while the Precision
indicates the Positive Predictive Value. It is clear that
improving the recall will impact on the precision and
vice-versa, so it is important to combine them in a sin-
gle measurements, which is obtained by considering
the F-measure.
3.2.3 Classifiers
Following is a description of the techniques evalua-
ted for the classification of images pixels. We tes-
ted three different algorithms: a very simple decision
tree, K-Nearest Neighbor and Support Vector Ma-
chine(Bishop, 2006). The first technique is extremely
simple and efficient, and is likely the strategy that one
must follow if the hardware resources are very limi-
ted. The other two methods are more advanced ma-
chine learning algorithms that for similar applications
showed robust results in the past.
Decision Tree. A decision tree enables to classify a
pattern in different classes. The tree nodes represent
the questions of a certain property; the branches, the
possible values of a property and each node leave re-
presents one category. The pattern tested is allotted
to the category attained. The links are mutually ex-
cluding and exhaustive. The main reasons to include
such a simple technique are: firstly, to see how ex-
tremely simple strategies work in order to evaluate if
the complexity of more sophisticated machine lear-
ning algorithms is justified. And secondly, to have
very simple and efficient solution that can be embed-
ded in robot prototypes with very limited hardware
resources. With this ideas in mind, we propose the
use of a simple tree structure with three nodes and
four leafs, as it illustrated in Figure 3. This method
has four free parameters that need to be tune: H
min
,
H
max
, S
min
and T D
max
. To that end, a training data-
set and an optimality criteria needs to be set. In the
experimental section this aspects will be addressed.
Figure 3: Scheme of the simple tree structure evaluated.
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
242

K-Nearest Neighbor (KNN). Once the features are
defined and the data is mapped to this feature space,
it is to be expected that pixels of the same class will
be close with respect to each other on this domain.
This is the basic idea behind the KNN technique. This
technique consists of classifying the incoming point
starting from its spacial location in the dominion of
features, and to classify it in function of its nearest
neighbors.
Choosing a right value of K is critical in KNN,
since, if too small a K is taken, we would often en-
counter mistaken classifications for those pixels that
are in the limit between two classes, while if a very
large K is taken, the cost of looking into all the neig-
hbors is too big and the class boundaries on the feature
space may be blurred.
Support Vector Machine (SVM). Given a set of trai-
ning examples where the data are marked as belon-
ging to one class or the other, the training algorithm
SVM builds a model to adjust each of the classes. By
intuition, SVM constructs a model representing the
training points in the space, separating the classes by
the widest margin possible. When the new examples
are put in correspondence with the said model, they
are classified in one class or the other according to
what side of the gap they are (Hearst et al., 1998).
These types of algorithms seek the hyperplane
with the greatest distance, or margin, with the points
nearest it itself. In this way, the points of the vector
labeled with one category will be on one side of the
hyperplane and the cases that are in the other category
will be on the other side.
The representation through kernel functions
(Scholkopf and Smola, 2001) offers a solution to the
problems in which the classes are not linearly sepa-
rable, by projecting the data into a space of greater
dimension.
In this work a Gaussian radial basis kernel
function (Scholkopf and Smola, 2001) is used,
k
σ
(x
1
,x
2
) = e
−
kx
1
− x
2
k
2
2σ
2
(8)
This classifier has in total two free parameters that
need to be set: σ which determines the shape of the
kernel, and ν that set the compromise between the va-
lue of the margin and the amount of errors on SVM
optimization (Hearst et al., 1998).
3.2.4 Implementation Details
The code is written in c++. To implement SVM,
the functions given by OpenCV (OpenCV, 2017) are
used. To implement KNN, the functions given by
OpenCV to interface the FLANN (Muja and Lowe,
2009) library are used.
3.3 Counting of Apples
After having classified the pixels of an input image as
part of an apple or the background, we have a groups
of pixels labeled as apples, not their quantity or lo-
cation. The next step was then to identify the apples
within those groups of pixels. In order to do that, we
resorted techniques applied to a binary image where
the background is set as black and pixels that belong
to an apple are set as white. The process we applied
consists of the following three stages: (i) Pixels Mask
Pre-processing, (ii) Detection of circles, and (iii) Cir-
cles Validation.
Pixels Mask Pre-processing. First applied mor-
phological operations to remove the noise and to
smoothen the regions edges. This helped to detect ci-
rcles and rule out regions with a small area.
In the result of the recognition of apple pixels,
there are regions with areas of diverse sizes, from re-
gions of significant size to others that are nothing but
a small set of noise pixels as seen in figure 4. The
noise is generated by the foliage, branches and other
elements that, due to their features resemble those of
the apples, but that are actually isolated small regions
that should be ruled out.
(a) Input image (b) After clasification of
pixels
Figure 4: Recognition of apple and background pixels be-
fore process the mask pre-processing.
The use of the morphological operations erosion
and dilation is proposed. Erosion leads to the removal
of the noise and the reduction of small regions, but it
also leads to an increase in the gaps contained in the
regions of significant size. On the other side, the di-
lation generates the opposite phenomenon, expansion
of the regions and reduction of the gaps within them.
For this reason four stages of morphological operati-
ons were applied, as seen in figure 5. At a first stage,
the aim is to remove the noise without modifying the
size of the area of the significant size regions and, at a
later stage, the aim is to smoothen the edges and join
the adjacent regions, keeping also approximately the
original size of each area.
As structuring element, a circle is used, due to its
proximity to the shape in which the apples appear in
the images. The size of the circle must be set in order
Computer Vision based System for Apple Detection in Crops
243
to remove the noise but taking care not to remove re-
gions of interest. In the following section there is an
evaluation of the more adequate size starting from the
experiments results.
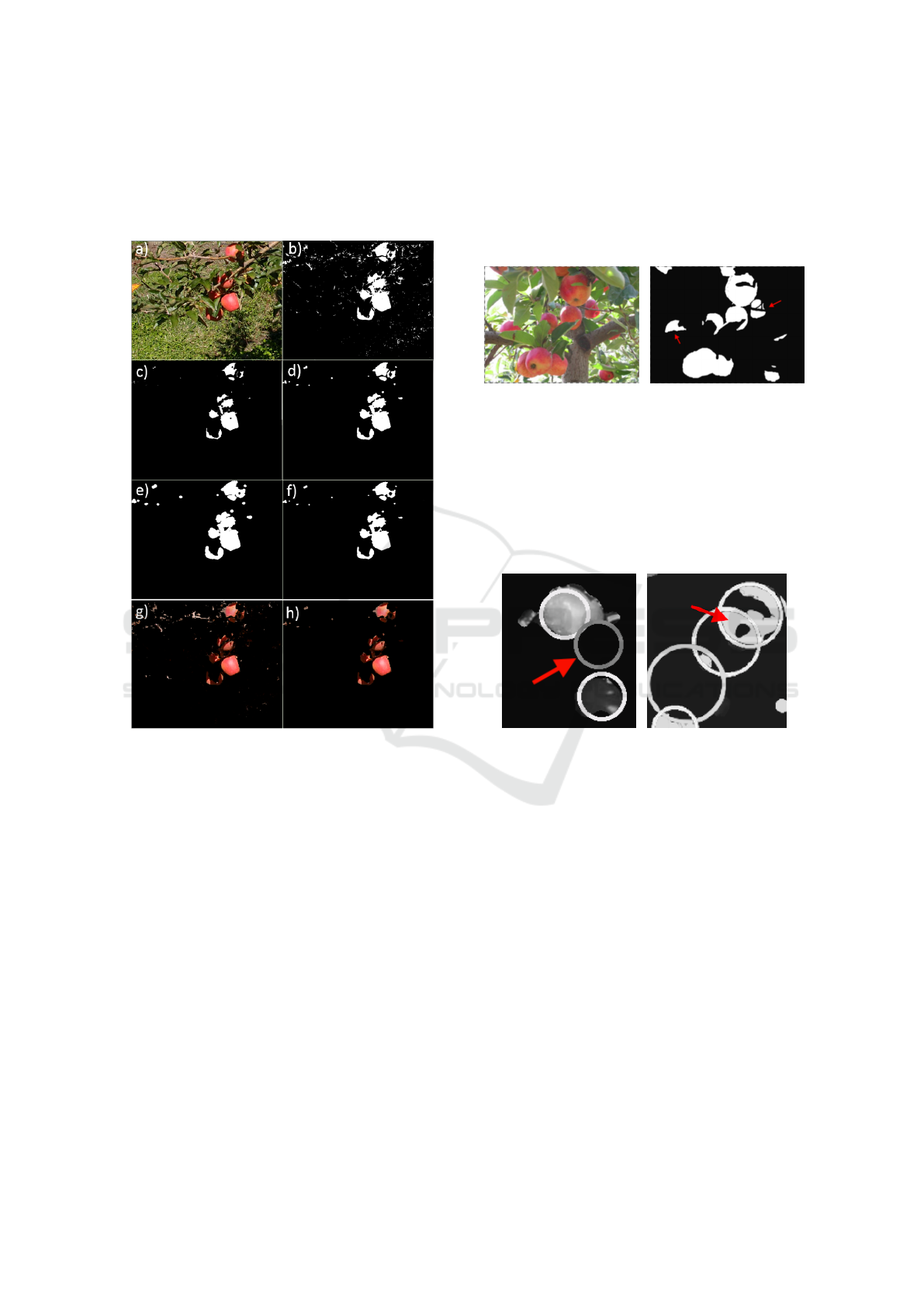
Figure 5: Stages of morphological operations (a) Original
Image (b)Mask of pixel classification (c)Erosion (d) Dilata-
tion (e) Dilatation (f) Erosion (g) RGB Mask of pixel clas-
sification (h) RGB Mask after applying morphological ope-
rations.
Detection of Circles. At a second stage, we recog-
nize the circles present in the binary image which is
the result of the recognition of the pixels. Since ap-
ples present a geometrical shape very near a sphere,
in two dimensions images they will be seen as circles,
whatever the location where the image is acquired.
The Hough transform for circles (Brunelli, 2009)
is used as method to recognize the circles present in
the binary images obtained after the previous step.
Cicles Validation. The last stage, after having obtai-
ned a collection of circles with their radius and cen-
ters, consists of studying each one of them in order to
validate which of the candidate circles actually repre-
sent an apple in the figure. Too occluded apples will
generate small areas but not so much as to be ruled out
by the morphological operations. If, moreover, they
exhibit curved edges, a circle will be detected which,
while belonging to an apple, does not represent that
apples real location. Also, it may well be that, by
being occluded, one same apple may generate more
than one separated and curved area, thus resulting in
only one apple being counted as several. Examples of
the previous situations are illustrated in Figure 6.
(a) Input image (b) Mask after pixel classifi-
cation
Figure 6: Example of how an apple may generate more than
one separated area or a curved are.
Another possible situation may be seen in Fi-
gure 7(a). In this case a circle was detected because
the higher region presents an outward circular curve,
which leads to the detection of indicated circle. As a
result, an empty circle is detected inside it.
(a) (b)
Figure 7: Wrong circles detected because the higher region
presents an outward circular curve or because a region exhi-
bits circular gaps inside.
To avoid detecting wrong circles, we suggest ru-
ling out detected circles whose area is less than a mi-
nimum area. This means that, for each circle, the area
of the region it includes is studied and the circle will
be ruled out if the said area is less than a defined per-
centage of the total are of the circle.
The second stage within the post-processing of ci-
rcles is to study the intersection of the circles.
As seen in figure 7(b), if a region exhibits circular
gaps inside it is possible that more than a circle will be
detected in it. To avoid these false detections, the area
in each circle is studied and the region that intersects
with other circles already studied is deducted.
In the case of figure 7(a), where first the higher ci-
rcle is detected, we study the area of the second circle
and deduct the intersection marked with the red arrow.
In this case, the second circle will be ruled out, since
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
244

the area is too small. If, on the contrary, the remaining
area of the second circle is noticeable, it would not be
ruled out but would be taken as a second apple.
Algorithm 2 summarizes the main steps perfor-
med for the detection of apples on the binary mask
obtained after the pixel classification.
Algorithm 2: Apple detection.
Input : Mask result of pixels classification
M : H ×W × 1
Output: List of centers and radiuses of the
circles circles ok
// Morphological operations
1 M = erode(M) // Eliminates noise
2 M = dilate(M)
3 M = erode(M) // Smooths regions
4 M = dilate(M)
// Find circles
5 circles(1,:) = HoughCircles(M)
6 circles ok = NULL
7 for each c in circles do
// Discard circles whose area is
less than a minimum area
8 mask c = new image()
9 mask c =
circle(mask c,c.center, c.radius)
mask = mask c & M
p = countNonZero(mask) ∗
100/(c.radius
2
∗ π)
10 if p > area ok then
// Study the region that
intersects with other
circles already studied
11 intersected circles =
intersected circles(c,circles ok)
12 if intersected circles is NULL then
13 circles ok.add(c)
14 else
15 mask intersec = mask c
16 for each c int in
intersected circles do
17 mask intersec =
mask intersec − c int
18
19 p =
countNonZero(mask intersec) ∗
100/(c.radius
2
∗ π)
20 if p > area intersect ok then
21 circles ok.add(c)
22 return circles ok
4 TRAINING STEP
This section present the results obtained in the trai-
ning step, considered according to each technique stu-
died and their comparison. Cross validation with 10
iterations is used for all trainings.
4.1 Data Base
In classification works using computer vision, the da-
tabase is an essential cornerstone; it is from this that
the condition of effectiveness of the techniques stu-
died are set. In this case the database is composed
by images acquired in the outdoor, with natural light,
seeking variety in them in order to be as close to re-
ality as possible. The database created besides the
images includes a labeling of which pixels belong to
apples and which to background, as well as the coor-
dinates of the center of each apple.
Since the database has 266 images, with an
average resolution of 600x800, there is an approxi-
mate total of 63.840.000 pixels, which requires a me-
mory structure of almost 64 million places, and this
has to be multiplied by three, since the features being
evaluated are three. It is then of utmost importance to
carry out a study of the minimum percentage of pixels
required that will be taken, so that it can be an accep-
table representation of the total of the pixels in the da-
tabase. In view of this, the percentage is changed and
the pixels are classified (as apple or non apple) using
the decision tree, given that this is the technique that
requires less execution time. By increasing the quan-
tity of pixels, after using 0.4% of the total of pixels,
the measure of success used (f-measure) remains sta-
tionary.
4.2 Fitting for the Parameters of Apple
Pixels Detection
Following is the fitting of the parameters for each
technique.
Decision Tree. The valid values for the parameters
studied are as follows: Hue in a range between 0 and
180, Saturation between 0 and 255 and edge density
between 0 and 100.
The values that gave the best results for the deci-
sion tree were: Min H = 13, Max H = 161, Min S =
47 and max edges = 76.
K Nearest Neighbor. Due to the features of the KNN
method when in a problem of imbalanced classes, it
is necessary to limit the percentage for the training of
the biggest class. In its turn, the quantity of nearest
neighbors considered, K, should be determined.
Computer Vision based System for Apple Detection in Crops
245

Support Vector Machine. The study of effective-
ness and efficiency was made by varying parame-
ters gamma and C of the kernel, gamma being the
weight of each points influence while C exchanges
wrong classification against surface simplicity. The
values that returned best results being C = 100 and
gamma = 1.
Comparison of Techniques. Comparing the results
obtained by using the three techniques, we have that
KNN is the technique that yields the best results, as
seen in figure 8. Also, it shows the improvement bet-
ween using only one characteristic and using three.
Figure 8: F-measure average obtained in the recognition of
apple pixels. First it shows the improvement of using three
characteristics with tree decision and then the comparison
using KNN and SVM.
Since the three techniques used the same domi-
nion of characteristics for their classification, it is in-
teresting to compare the classification of each of the
methods for a set of points normalized from 0 to 1 (a
cube) of the three characteristics; they may be seen in
3D, as shown in figure 9.
It is observed how, while the cloud of apple pixels
is similar in the three methods, KNN and SVM do not
present straight borders, which is closer to reality.
Morphology. The study of the morphology parame-
ters was made using the Decision Tree technique be-
cause is more quickly that the others. The parameters
used for the technique are who gives better results of
f-measure. It was used cross validation, using values
between 1 and 10 for the radios, obtaining the bests
results when use radio of 5px for erode and 7px for
dilation.
4.3 Fitting for the Parameters of Apples
Detection
Following is the fitting of parameters for the detection
of the apples in themselves. First there is a description
of the parameters used to detect the Hough circles and
then of the parameters used for the post-processing.
Detection of Hough Circles. The minimum distance
between circles detected and the accumulator thres-
hold was varied. The minimum and maximum radium
was determined by estimating the average radius in
the database: the values were 20 and 75 pixels, re-
spectively.
In order to find out whether the circle found is the
same one labeled at the database only by using their
centers, in most cases they would be found not to coi-
ncide, so a margin of tolerance between centers equal
to the value of the radius of the circle found is used.
The Hough transform uses two values to be de-
termined: the minimum acceptable distance among
circles and an accumulator that indicates the percen-
tage that should coincide in the image with the circle
found. The values obtained for the detection of cir-
cles that gives better, with an average distance among
circles of 67 and an accumulator of 8.
Post-processing in Circles. Using 20% of the area of
an apple as minimum area for a circle to be considered
valid, better results are obtained by giving an average
FV of 0,53 ± 0, 04.
In the table 1 it shows the values of all the para-
meters used in the project.
5 RESULTS
The proposed approach for automatic apple detection
consists on two main steps as was described in the
previous Sections. Firstly, the individual pixels of
each input image are classified as Positive or Negative
(recall that the positive class is associated to pixels
that potentially belong to an apple). Secondly, the
morphology of the set of Positive pixels is analyzed
to find circular structures that lead to the final goal
of detecting the apples present in the target image. It
is clear that the individual performance of both sta-
ges will impact on the overall performance of the pro-
posed approach, and so both steps need to be care-
fully analyzed and trained as explained in the previ-
ous Section.
Let us start by analyzing the results obtained for
the classification of the individual pixels. Figure 8
summarizes the results obtained for different classifi-
cation methods over the test dataset and Figure 9 il-
lustrates how the feature space is partitioned for the
classification strategies evaluated. The performance
of different methods is evaluated according to the F-
measure obtained due to the imbalance nature of this
problem (as explained in Section 3.2.2). The most
accurate algorithm in terms of the F-measure was the
K Nearest Neighbor method with approximately 64%
of F-measure respectively. In terms of efficiency, the
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
246

Figure 9: Classification of each of the methods for a set of points normalized from 0 to 1 of the 3 characteristics. First is the
decision Tree, then KNN and finally SVM.
simple decision Tree achieved an overall F-measure
of 62%. Depending on each particular application,
the limitation on the hardware and computational re-
sources, and the requirements on the performance de-
tection, one need to choose the method that better fits
the problem characteristics.
Figure 10: Examples of apples detected. Video and additi-
onal material at (Marzoa, 2017b).
Using the mask of pixels classified by decision
tree method, morphological operations are applied to
achieve the final goal of detecting the apples present
in the test images. Again, part of the images of the
data set were used to train and fit the parameters of
the solution implemented, while other independent
images (never used during the training step) are used
for testing the proposed solution. Figure 10 shows
the output of the proposed solution for four input test
images. As in the pixel classification step, the final
performance of the proposed solution is analyzed in
therms of the F-measure. It is important to point out
that while the definition of F-measure, Recall and Pre-
cision is unique, the meaning of this quantities is dif-
ferent in this second step. In the pixel classification
step, we define the TP (true positive) quantity as the
number of pixels classified as part of an apple that
truly belong to an apple, in the final step, TP is defined
as the number of apples correctly detected, while FP
is the number of apples detected that are not present
in the image (false detections) and FN corresponds to
the number of apples present in the image that where
not detected by the method. Table 2 summarizes the
final results obtained for the detection of apples. In
this table, the Recall represents the percentage of ap-
ples present in the input image that are correctly de-
tected, and the Precision indicates the percentage of
detections give by the algorithm that actually corre-
spond to an apple. As explained in previous Sections,
Recall and Precision are combined in a single mea-
sure: the F-measure. Others works dont use the same
measurements that us, in general, the focus is on the
over all apple count so we had to calculate the results
that are presented in this table using the images and
results presented in theirs articles.
To conclude this Section is important to highlight
some difficulties that arises when comparing different
apple detection approaches. In first place, different
solutions proposed in the literature make use of sig-
nificantly different setups. For example: some works
make uses of stereo pairs of cameras plus high preci-
sion positioning systems (Wang et al., 2013), tunnel
like structures (Gongal et al., 2016b) to control illu-
mination conditions, hyperspectral cameras (Safren
et al., 2007), or thermal imaging devices (Stajnko
et al., 2004). Secondly, the conditions of crop yield
also has a great impact on systems performance, for
instance, special fruit thinning may significantly sim-
plify the problem. Thirdly, the success measurements
uses also present significant variations, for example,
in (Wang et al., 2013) the focus is on the over all
apple count, hence false positive detections may be
compensated with false negative detections (while the
f-measure penalize both).
6 CONCLUSIONS
This article presents a simple pipeline for the de-
tection of apples in crops using pattern recognition
and computer vision tools. The set up consists of a
single RGB camera that captures under unconstrai-
Computer Vision based System for Apple Detection in Crops
247
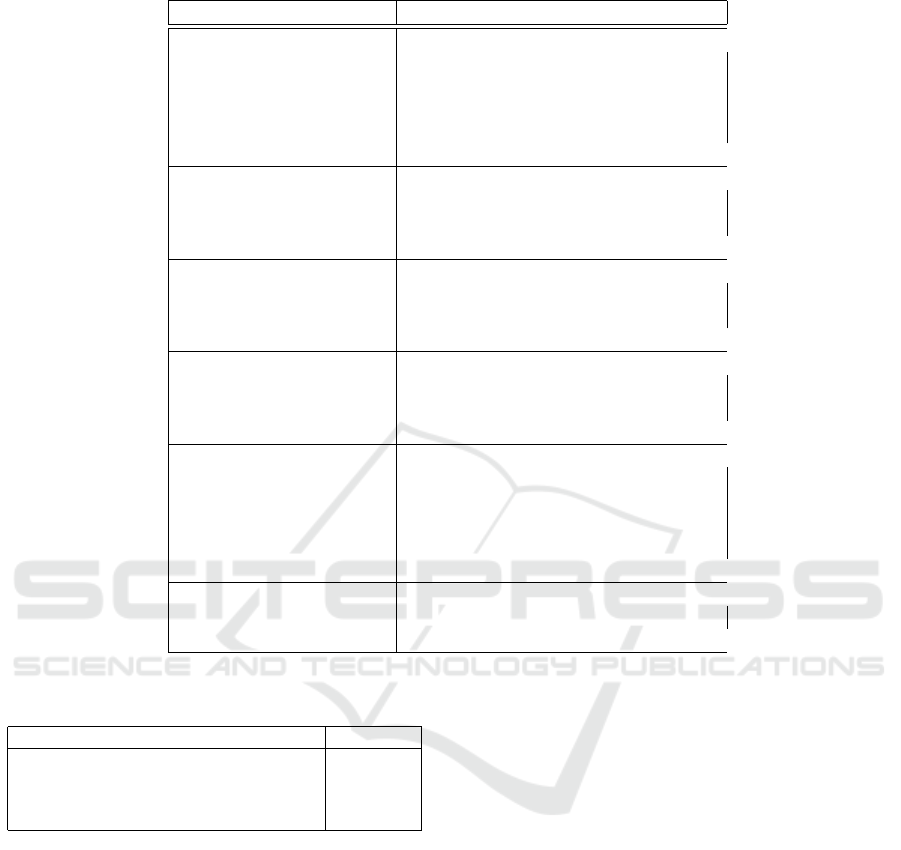
Table 1: Values of parameters used.
Algorithm Parameter Value
Decision tree Hue min
Hue max
Sat min
Edges density
13
161
47
0 - 100
KNN K
% of pixel background
23
45%
SVM Gamma
C
1
100
Morphology Erode
Dilate
5
7
Hough circles Min radio
Max radio
Min distance
Accumulator
20
75
67
8
Post-processing in circles Min area 20%
Table 2: Recall, Precision and F-measure for different apple
detection strategies.
Method Recall Precision F-measure
(Zhao et al., 2005) 67,9% 100,0% 80.1%
(Linker et al., 2012) 72,8% 97,2% 83.3%
(Ji et al., 2012) 46,4% 100,0% 63,4%
ours 92,0% 90,3% 91.5%
ned natural illumination conditions in unthinned ap-
ple crops.
The detection of apples was made in two big sta-
ges. First the classification of pixels and then the
detection of apples within the previously classified
pixels. Three techniques were studied for the clas-
sification of pixels: decision tree, KNN and SVM.
The best results were obtained with KNN algorithm,
while the decision tree probes to be a very adequate
alternative if computational cost or time are very limi-
ted. The determinant features to make the classifica-
tion were tonality, saturation and edge density. As an
improvement of the recognition of pixels, morpholo-
gical operations were used. Once the pixels had been
classified, we proceeded to the detection of the apples
by using the Hough transform for circles. Finally, the
quantity of pixels within the circles found was analy-
zed to validate the circles detected and significantly
reduce the number of false positive.
The main contributions of this work are: The use
of robust machine learning techniques by facing the
problem as a pattern recognition imbalanced problem.
We present an updated review of the current state of
the art and create a database with 266 high resolution
images which was made publicly available.
There are some evident path in which this work
can be pushed forward. For example: the output of
multiple classifiers can be combined to improve the
over all performance (Kuncheva, 2004). With the in-
crease of the number of publicly available databases,
the design of complex modern classifiers such as deep
neural networks will be possible. And finally, instead
of processing individual images, sequence of images
(video data) can be analyzed ensemble exploiting the
temporal correlation of the data.
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
248

REFERENCES
Aggelopoulou, A., Bochtis, D., Fountas, S., Swain, K. C.,
Gemtos, T., and Nanos, G. (2011). Yield prediction in
apple orchards based on image processing. Precision
Agriculture, 12(3):448–456.
Barandela, R., S
´
anchez, J. S., Garcıa, V., and Rangel, E.
(2003). Strategies for learning in class imbalance pro-
blems. Pattern Recognition, 36(3):849–851.
Bishop, C. M. (2006). Pattern recognition and machine le-
arning. springer.
Brunelli, R. (2009). Template matching techniques in com-
puter vision: theory and practice. John Wiley & Sons.
Di Martino, M., Decia, F., Molinelli, J., and Fern
´
andez, A.
(2012). Improving electric fraud detection using class
imbalance strategies. In International Conference on
Pattern Recognition and Methods, 1st. ICPRAM., pa-
ges 135–141.
Di Martino, M., Fern
´
andez, A., Iturralde, P., and Le-
cumberry, F. (2013a). Novel classifier scheme for
imbalanced problems. Pattern Recognition Letters,
34(10):1146–1151.
Di Martino, M., Hern
´
andez, G., Fiori, M., and Fern
´
andez,
A. (2013b). A new framework for optimal classifier
design. Pattern Recognition, 46(8):2249–2255.
Dougherty, E. R. and Lotufo, R. A. (2003). Hands-on mor-
phological image processing, volume 59. SPIE press.
Garc
´
ıa, V., S
´
anchez, J., and Mollineda, R. (2012). On
the suitability of numerical performance measures for
class imbalance problems. International Conference
In Pattern Recognition Aplications and Methods, pa-
ges 310–313.
Gongal, A., Silwal, A., Amatya, S., Karkee, M., Zhang, Q.,
and Lewis, K. (2016a). Apple crop-load estimation
with over-the-row machine vision system. Computers
and Electronics in Agriculture, 120:26–35.
Gongal, A., Silwal, A., Amatya, S., Karkee, M., Zhang, Q.,
and Lewis, K. (2016b). Apple crop-load estimation
with over-the-row machine vision system. Computers
and Electronics in Agriculture, 120:26–35.
Hearst, M. A., Dumais, S. T., Osuna, E., Platt, J., and Schol-
kopf, B. (1998). Support vector machines. IEEE In-
telligent Systems and their Applications, 13(4):18–28.
Japkowicz, N. and Stephen, S. (2002). The class imbalance
problem: A systematic study. Intelligent data analy-
sis, 6(5):429–449.
Ji, W., Zhao, D., Cheng, F., Xu, B., Zhang, Y., and Wang, J.
(2012). Automatic recognition vision system guided
for apple harvesting robot. Computers & Electrical
Engineering, 38(5):1186–1195.
Jim
´
enez, A. R., Jain, A. K., Ceres, R., and Pons, J. (1999).
Automatic fruit recognition: a survey and new results
using range/attenuation images. Pattern recognition,
32(10):1719–1736.
Kubat, M., Matwin, S., et al. (1997). Addressing the curse
of imbalanced training sets: one-sided selection. In
ICML, volume 97, pages 179–186. Nashville, USA.
Kuncheva, L. I. (2004). Combining pattern classifiers: met-
hods and algorithms. John Wiley & Sons.
Linker, R., Cohen, O., and Naor, A. (2012). Determination
of the number of green apples in rgb images recorded
in orchards. Computers and Electronics in Agricul-
ture, 81:45–57.
Liu, X.-Y., Wu, J., and Zhou, Z.-H. (2009). Exploratory un-
dersampling for class-imbalance learning. IEEE Tran-
sactions on Systems, Man, and Cybernetics, Part B
(Cybernetics), 39(2):539–550.
Manjunath, B. S., Ohm, J.-R., Vasudevan, V. V., and Ya-
mada, A. (2001). Color and texture descriptors. IEEE
Transactions on circuits and systems for video techno-
logy, 11(6):703–715.
Marzoa, C. (2017a). Apple data base. Website. last chec-
ked: 17.07.2017.
Marzoa, C. (2017b). Web of the apple detection proyect.
Website. last checked: 17.07.2017.
Muja, M. and Lowe, D. G. (2009). Fast approximate nearest
neighbors with automatic algorithm configuration. VI-
SAPP (1), 2(331-340):2.
OpenCV (2017). Opencv. Website. last checked:
17.07.2017.
Rakun, J., Stajnko, D., and Zazula, D. (2011). Detecting
fruits in natural scenes by using spatial-frequency ba-
sed texture analysis and multiview geometry. Compu-
ters and Electronics in Agriculture, 76(1):80–88.
Robinson, T. (2006). The evolution towards more competi-
tive apple orchard systems in the usa. In XXVII Inter-
national Horticultural Congress-IHC2006: Internati-
onal Symposium on Enhancing Economic and Envi-
ronmental 772, pages 491–500.
Safren, O., Alchanatis, V., Ostrovsky, V., and Levi, O.
(2007). Detection of green apples in hyperspectral
images of apple-tree foliage using machine vision.
Transactions of the ASABE, 50(6):2303–2313.
Scholkopf, B. and Smola, A. J. (2001). Learning with ker-
nels: support vector machines, regularization, optimi-
zation, and beyond. MIT press.
Stajnko, D., Lakota, M., and Ho
ˇ
cevar, M. (2004). Estima-
tion of number and diameter of apple fruits in an or-
chard during the growing season by thermal imaging.
Computers and Electronics in Agriculture, 42(1):31–
42.
Szeliski, R. (2010). Computer vision: algorithms and ap-
plications. Springer Science & Business Media.
Tabb, A. L., Peterson, D. L., and Park, J. (2006). Segmen-
tation of apple fruit from video via background mo-
deling. In 2006 ASAE Annual Meeting, page 1. Ameri-
can Society of Agricultural and Biological Engineers.
Wang, Q., Nuske, S., Bergerman, M., and Singh, S. (2013).
Automated crop yield estimation for apple orchards.
In Experimental robotics, pages 745–758. Springer.
Zhao, J., Tow, J., and Katupitiya, J. (2005). On-tree fruit
recognition using texture properties and color data.
In Intelligent Robots and Systems, 2005.(IROS 2005).
2005 IEEE/RSJ International Conference on, pages
263–268. IEEE.
Computer Vision based System for Apple Detection in Crops
249
