
Fast 3D Scene Alignment with Stereo Images
using a Stixel-based 3D Model
Dennis W. J. M. van de Wouw
1,2
, Willem P. Sanberg
1
, Gijs Dubbelman
1
and Peter H. N. de With
1
1
Department of Electrical Engineering, Eindhoven University of Technology, Eindhoven, The Netherlands
2
ViNotion B.V., Eindhoven, The Netherlands
Keywords:
Image Registration, Real-time, View Synthesis, Stixel-World.
Abstract:
Scene alignment for images recorded from different viewpoints is a challenging task, especially considering
strong parallax effects. This work proposes a diorama-box model for a 2.5D hierarchical alignment approach,
which is specifically designed for image registration from a moving vehicle using a stereo camera. For this
purpose, the Stixel World algorithm is used to partition the scene into super-pixels, which are transformed
to 3D. This model is further refined by assigning a slanting orientation to each stixel and by interpolating
between stixels, to prevent gaps in the 3D model. The resulting alignment shows promising results, where
under normal viewing conditions, more than 96% of all annotated points are registered with an alignment
error up to 5 pixels at a resolution of 1920 × 1440 pixels, executing at near-real time performance (4 fps) for
the intended application.
1 INTRODUCTION
Image registration is the process of placing two ima-
ges captured from different viewpoints in the same
coordinate system. It ensures that pixels represen-
ting the same world point in both images, map to the
same image coordinates after successful registration.
This is relevant in many applications, such as medical
image analysis, object recognition, image stitching
and change detection (van de Wouw et al., 2016). Es-
pecially for the latter application, an accurate align-
ment is crucial as it enables pixel-wise comparisons
between the two images.
Image registration becomes quite challenging
when considering images acquired from a moving
vehicle in an urban environment, which is the focus
of this work. In a repetitive capturing scenario, ima-
ges are typically acquired from different viewpoints,
while significant time may have passed between cap-
turing the historic image and the live image. This po-
ses additional challenges, where the registration now
has to cope with dynamic appearance changes of the
scene, as well as strong parallax effects.
Appearance changes are generally unavoidable
when recording outdoors at different moments in
time. Changes in lighting and different weather con-
ditions may significantly affect the colors and con-
trast of a scene. Furthermore, there may be dynamic
changes in the scene, such as other traffic participants
and objects placed in or removed from the scene in
between the recordings moments. Although such an
object may only exist in either the historic image or
the live image, it should still be aligned to the cor-
rect part of the other image. As a result, regular flow-
based methods cannot be used to align such objects as
they are not present in both images (Werlberger et al.,
2010).
Another challenge is parallax, which results in a
difference between the apparent positions of an object
viewed along two different lines of sight, e.g. when
images are captured from different viewpoints. As
a consequence, the relative position and even the or-
dering of objects in the historic and live image may
change when capturing the same scene from two dif-
ferent viewpoints. This is depicted in Figure 1, where
the object ordering changes from A-B-C-D to A-C-
B-D. This change in relative positions of the objects,
depending on their 3D position in the scene, can no
longer be handled by a global-affine transformation
of the images.
To overcome the parallax issue, the registration
problem can be solved in 3D, where the positioning
of objects is uniquely defined. By aligning the 3D
point clouds and projecting the results back to 2D,
parallax is handled correctly. However, since our 3D
points are estimated from a stereo camera using dis-
250
Wouw, D., Sanberg, W., Dubbelman, G. and With, P.
Fast 3D Scene Alignment with Stereo Images using a Stixel-based 3D Model.
DOI: 10.5220/0006535302500259
In Proceedings of the 13th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2018) - Volume 4: VISAPP, pages
250-259
ISBN: 978-989-758-290-5
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Figure 1: Sample images showing the same scene from dif-
ferent viewpoints. Note the perspective distortion and the
parallax effect, i.e. the same lighting pole C is located in
front of A in the left image, while it is in front of B in the
right image.
parity estimation, they are not sufficiently accurate for
a direct projection. Instead, a model-based projection
is required that is robust against noise in the 3D-point
cloud. For this purpose and as an initial step, we adopt
the hierarchical 2.5D alignment approach introduced
in (van de Wouw et al., 2016), which is explained
in Section 3. This adopted approach is only able to
align the non-linear ground surface, but not the ob-
jects above the ground surface. Therefore and as a
next step, the main focus of this work is to extend the
alignment to the entire scene, including 3D objects.
The remainder of this paper is organized as fol-
lows. In the next section, the proposed method is laid
out to related work on image registration under view-
point differences and 3D scene modeling. Section 3
summarizes the baseline image registration method.
Section 4 details the proposed method, followed by a
validation of our method in Section 5. A discussion
on the application of the proposed work is given in
Section 6. Finally, Section 7 presents conclusions.
2 RELATED WORK
2.1 Image Registration under
Viewpoint Differences
To handle perspective distortion during alignment of
images from different viewpoints, several approaches
exist. The first approach involves segmenting the 2D
scene into sufficiently small parts, such that for each
part an individual affine transformation exists to re-
gister it to the target image or to a common coordi-
nate system. For this purpose, the authors of (Zhang
et al., 2016) and (Su and Lai, 2015) use a mesh-based
approach, where they divide the image into a grid
and for each cell find a local affine transformation.
This way, they can accommodate moderate deviati-
ons from planar structures. Lou and Gevers (Lou and
Gevers, 2014) first segment the scene into planar regi-
ons and find an affine transformation for every plane,
in theory allowing to prevent the parallax issues il-
lustrated in Figure 1. Although these methods show
promising results, they cannot be performed in real-
time, making them less suited to be used while dri-
ving, which is the aim of our work.
Another approach is to solve the alignment in 3D.
As a change in viewpoint does not alter the relative 3D
positions of the objects in the scene, the problem sim-
plifies to estimating a rigid transformation. The alig-
ned 3D point cloud is then projected back to 2D, such
that the historic scene is rendered from the live camera
viewpoint. The naive approach would transform each
individual point in the point cloud and project it to
2D separately. However, this causes significant holes
in the resulting image, which become more apparent
when viewpoint differences are considered. Alterna-
tively, a hierarchical 2.5D alignment (van de Wouw
et al., 2016) can be employed. This method applies a
rigid 3D transformation to a textured polygon model
of the historic scene, after which the transformed mo-
del is projected back to 2D. This results in a registe-
red image without holes in which parallax is handled
correctly, i.e. the objects are in the correct positions
in the 2D image. Moreover, this strategy allows for
real-time execution while driving. For this reason, we
build further upon this method in our current work.
2.2 3D Scene Modeling
Projecting textured surfaces outperforms per-pixel
processing, since it facilitates addressing holes and
noise in the depth data. For this purpose, we require a
3D surface model for the full scene. In the field of 3D
reconstruction, meshes are a common data represen-
tation. These meshes are often acquired via a Delau-
nay triangulation of measured point clouds. Typically,
these algorithms aim at single object reconstruction
(such as digitizing statues and the like, for cultural
preservation), but several methods are also employed
in our context: outdoor scene modeling. These sys-
tems achieve a high level of geometric accuracy in the
data that is captured close to the objects in the scene,
e.g. facade modeling with accurate ridges and win-
dow stills, etc. (Salman and Yvinec, 2010) (Chauve
et al., 2010), or detailed rock-mass-surface and stai-
rcases (Maiti and Chakravarty, 2016). However, the
processing times of these algorithms lies in the or-
der of seconds (Salman and Yvinec, 2010) (Maiti and
Chakravarty, 2016) or even minutes (Labatut et al.,
2009) (Chauve et al., 2010) per scene, which does
not satisfy our real-time processing constraints. Mo-
reover, our system does not need that level of detail.
Faster pipelines exist, but typically provide 3D mo-
dels that are too sparse or coarse (Natour et al., 2015),
Fast 3D Scene Alignment with Stereo Images using a Stixel-based 3D Model
251

whereas we need dense modeling.
Alternative modeling strategies can be derived
from algorithms that are predominantly designed for
image segmentation instead of 3D modeling, namely:
super-pixel methods. In general, they have been de-
signed to process 2D color images, such as LV (Fel-
zenszwalb and Huttenlocher, 2004), SLIC (Achanta
et al., 2012) and SEOF (Veksler et al., 2010). Each
of these has its own various extensions to incorporate
2.5D or point cloud data. Extensions for LV involve
LVPCS (Strom et al., 2010), MLVS (Sanberg et al.,
2013) and GBIS+D (Cordts et al., 2016), SLIC is ex-
tended in StereoSLIC (Yamaguchi et al., 2014), and
SEOF is modified into SEOF+D (Cordts et al., 2016).
Although all of these methods can provide relevant
super-pixel segmentations, the resulting super-pixels
are shaped irregularly, yielding an inefficient repre-
sentation. Moreover, they need to be calculated on
the whole image at once. For trading off modeling
flexibility versus optimality and computational com-
plexity, the Stixel World has been introduced (Pfeif-
fer, 2012). This probabilistic super-pixel method has
been designed specifically for the context of intelli-
gent vehicles, aiming at providing a compact yet ro-
bust representation of traffic scenes in front of a vehi-
cle, which can be generated efficiently in real time.
The Stixel World algorithm relies on disparity data
to partition scenes into vertically stacked, rectangu-
lar patches of a certain height and 3D position with
respect to the camera sensor. These rectangular pat-
ches are labeled as either ground or obstacle during
the segmentation process, thereby providing a seman-
tic segmentation as well as a 3D representation. Mo-
reover, stixels can be computed efficiently using Dyn-
amic Programming, where multiple columns of dispa-
rity measurements are processed in parallel (Pfeiffer,
2012).
Another specialized scene modeling method for
intelligent vehicles relies on 3D voxels (Broggi et al.,
2013). It generates and removes cubic voxels to
handle the dynamic aspect of a traffic scene and stores
them efficiently in an octree-based fashion. However,
it relies on tracking the voxels over time and does not
employ any real-world regularization. Since our sy-
stem operates at a low frame rate (±6 fps), but at a
much higher resolution (above HD instead of VGA),
this method is likely to provide noisy and spurious
false detections.
Considering the methods described above, we
propose to avoid modeling of the entire scene into an
expensive detailed mesh, or in a voxel grid without
strict regularization. Instead, we introduce a simpli-
fied 3D model, which we refer to as the ’diorama-box
model’, shown in Figure 3. This model extends the
non-linear surface model from (van de Wouw et al.,
2016) with 3D objects, where objects are modeled by
one or more slanted planar regions (in 3D) estima-
ted from a Stixel World representation. The proposed
model allows for real-time computation.
The main contributions of this paper are as fol-
lows. First, we introduce an efficient 3D scene mo-
del to be used in the 2.5D hierarchical alignment
approach (van de Wouw et al., 2016), by including
super-pixels obtained through the Stixel World algo-
rithm into the existing ground model. Second, we
improve the consistency of the 3D model by adap-
ting the obtained stixel-based model. Finally, we
validate the proposed model by employing it in our
scene-alignment approach and generally show that the
registration error is below 5 pixels for HD+ images
(1920 × 1440 pixels).
3 BASELINE IMAGE
REGISTRATION
The 2.5D hierarchical alignment approach (van de
Wouw et al., 2016) aims at aligning two images of
the same scene that are captured from different view-
points. It builds on the idea that registration errors due
to parallax can be avoided when aligning the 3D point
clouds, instead of directly transforming the 2D ima-
ges. For this purpose, a 3D scene model of the historic
scene is constructed onto which the historic texture is
projected. Next, this textured model is transformed to
the coordinate system of the live image. The transfor-
med model is then projected back to 2D, which ren-
ders the historic image as if seen by the live camera.
Finally, small misalignments after initial registration
are corrected by a registration refinement based on op-
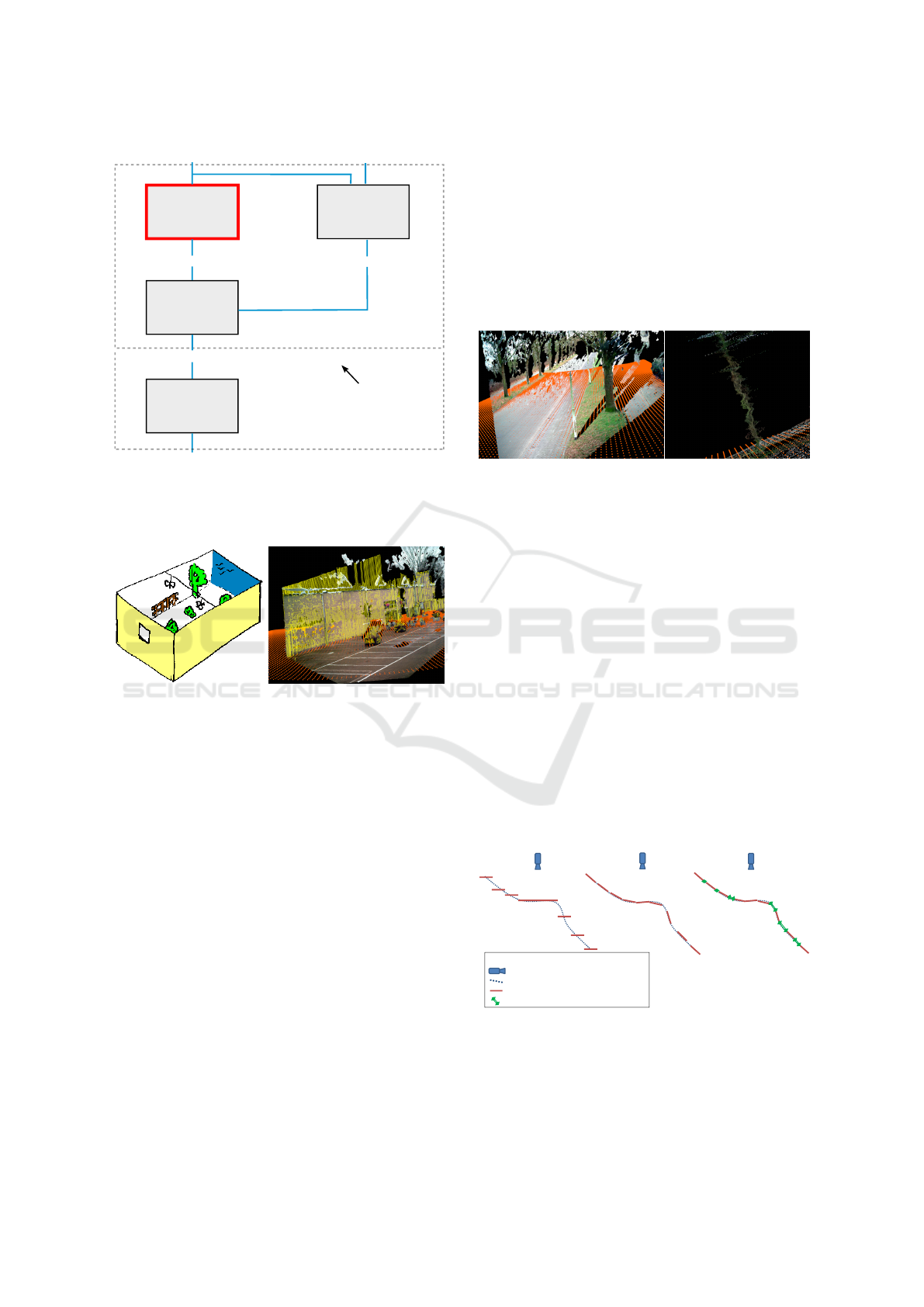
tical flow. This approach is summarized in Figure 2.
The 3D transformation (pose) estimation from Fi-
gure 2 lies outside the scope of this paper and is des-
cribed in more detail in (van de Wouw et al., 2017).
The current work focuses on the 3D scene recon-
struction and aims at registering the historic image to
the live image in 2D.
It should be noted that we are not necessarily in-
terested in 3D model accuracy, as long as the model
is able to simulate the 2D aligned image with a low
registration error. In a similar fashion, the pose esti-
mation also minimizes the registration error after pro-
jection to 2D, instead of establishing the 3D pose in
world coordinates.
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
252
Registration
refinement
Simulate live
viewpoint
Polygon model
Historic image & depth map
Live image & depth map
3D transformation [R|t]
Initial registration of historic to live image
3D
2D
Aligned historic and live image
3D Scene
reconstruction
Estimate 3D
transformation
1
2
3
4
Goal of this work
Figure 2: Complete overview of the 2.5D hierarchical alig-
nment approach. The red block is the focus of this paper,
where we aim at minimizing the registration error in 2D.
(a) (b)
Figure 3: (a) Diorama-box model representing the scene by
superimposing flat objects on a ground plane. (b) Example
visualization of the resulting model.
4 APPROACH
We introduce a diorama-box model, as illustrated in
Figure 3, to be used as the historic 3D scene model in
the alignment approach described in Section 3. This
model is a simplification of the real world, where ob-
jects are modeled by flat planes that are perpendicular
to the optical axis. This approach is especially suited
for noisy depth data, such as captured by passive ste-
reo cameras, which is insufficiently accurate for con-
structing a full 3D mesh of the scene. Figure 4 shows
an example of such a point cloud as well as a zoom on
one of the trees. This figure clearly demonstrates that
it is not feasible to directly retrieve the 3D shape of
the tree. Instead, we propose to approximate all ob-
jects above the ground surface by a planar structure,
which is implemented efficiently by using the Stixel
World algorithm (Pfeiffer, 2012) and projecting the
stixels to 3D. In the Stixel World algorithm, the image
is first divided into columns of fixed width. Based on
the disparity estimates, each column is then split into
vertically-stacked stixels, i.e. rectangular superpixels,
using a maximum a-posteriori optimization. This pro-
cess is solved efficiently with dynamic programming
and results in a collection of stixels, each with a label
to contain either ground or obstacle content. In this
work, we are only interested in the obstacle stixels.
(a) (b)
Figure 4: (a) Example point cloud derived from stereo mat-
ching and (b) Zoomed view from the side of the tree, where
depth inaccuracies deform its 3D shape.
4.1 Projecting Stixels to 3D
The Stixel World algorithm results in a set of rectan-
gular super-pixels. As depth information is available,
it can be used to map these super-pixels to 3D. Ho-
wever, directly projecting each stixel to 3D causes
every stixel to be fronto-parallel, i.e. perpendicular
to the optical axis. Obviously, this might not corre-
spond to the actual orientation of the objects being
modeled. Therefore, we slant each 3D stixel to better
represent the actual objects. Stixel slanting is concep-
tually visualized in Figure 5. This slanting improves
the model accuracy when rendering to a different vie-
wpoint. The degree of slanting for each stixel is obtai-
ned through a least-squares plane fit on the disparity
values within the stixel.
Top-view stixel illustration. Legend:
Camera/vehicle viewing direction
Real obstacle shape
Surface approximation with stixels
Interpolated surface stixels
A: fronto-parallel
approximation
B: slanting
C: slanting and
interpolation
Figure 5: Conceptual visualization of stixel slanting and in-
terpolation. Slanting ensures that the stixels follow the ac-
tual shape of the object more accurately, while interpolation
fills the gaps between the 3D stixels.
Fast 3D Scene Alignment with Stereo Images using a Stixel-based 3D Model
253

4.2 3D Stixel Interpolation
Although stixels connect in 2D, they do not neces-
sarily connect in 3D for two reasons. First, looking
from the camera point-of-view, camera rays diverge,
meaning adjacent pixels may map to world points,
which are far apart. Second, as each stixel is assig-
ned a slanting orientation, the stixel boundaries may
not lie at the same depth. This causes holes in the
3D model when viewed from a different camera pose,
as depicted in Figure 6(a). This figure clearly shows
that holes appear, when projecting the 3D stixels to a
different viewpoint without interpolation.
To counter this effect, we interpolate between ad-
jacent stixels as shown in Figure 5, where we add a
new stixel that connects two adjacent stixels, if they
are sufficiently close to each other. The effect on the
aligned image is shown in Figure 6(b).
(a) (b)
Figure 6: Resulting aligned image (a) without stixel inter-
polation and (b) with stixel interpolation, when rendered to
a synthetic viewpoint.
Although computing the stixel model at a lower
resolution may decrease the number of holes in the
resulting synthesized image, this would significantly
decrease the capability to model thin objects. The-
refore we consider the proposed stixel interpolation
better suited to reduce holes, especially because the
additional computation time is negligible.
4.3 Rejecting Invalid Pixels
In order to capture thin objects inside a stixel, we
choose thin stixels with a width of only 7 pixels. It
may still occur that an object only partially covers
a stixel, since the horizontal grid is fixed. The re-
sulting stixel may therefore contain both foreground
and background pixels. Figure 7(a) shows an exam-
ple of background pixels that are incorrectly treated as
part of the tree. To correct for such errors, we adapt
the texture map prior to projecting it onto the 3D mo-
del. Here, we label all pixels inside a stixel that do not
satisfy the estimated slanting orientation, to be inva-
lid. The invalid background pixels are then removed
and replaced by black pixels in the aligned 2D image
(Figure 7(b)).
(a) (b)
Figure 7: (a) Aligned image part where background pixels
are contained inside a stixel and (b) the same image when
pixels that do not satisfy the slanting orientation are set to
invalid. This example uses wider stixels for visualization
purposes.
5 EXPERIMENTS & RESULTS
The proposed registration approach using the box-
diorama model has been validated on two separate
datasets. The first dataset features many slanted sur-
faces, such as shown in Figure 6. The purpose of
this dataset is to specifically evaluate the added va-
lue of our stixel slanting and interpolation adaptati-
ons within the proposed registration approach. Next,
an additional dataset was recorded that features dif-
ferent lateral displacements, in order to evaluate the
effect of viewpoint differences between the live and
historic recordings.
To validate the proposed registration approach, we
evaluate it on pairs of videos, which were recorded in
both urban and industrial environments. Each video
pair features a historic recording and a live recording
of the same scene, acquired at a different moment in
time. These videos were recorded under realistic con-
ditions, by mounting the entire system on our driving
prototype vehicle. This prototype (Figure 8) features
a high-resolution stereo camera (1920 × 1440 pixels)
as well as a GPS/IMU device for accurate georefe-
rencing of all recorded images. While driving, live
and historic images featuring the same scene from dif-
ferent viewpoints are paired using GPS position and
vehicle orientation. Next, depth measurements are
obtained through disparity estimation, yielding 3D in-
formation for both the live and historic scene. At this
point, the baseline alignment approach (Section 3) is
applied, which also includes the proposed 3D scene
model (Section 4).
5.1 Performance Metrics
As this work aims at registering the live and historic
images in 2D, we measure the alignment error bet-
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
254

Figure 8: Prototype vehicle used for our experiments, fe-
aturing a stereo camera with 1920 × 1440 pixel resolution
and a GPS/IMU positioning system for georeferencing the
images.
ween the live image and the aligned historic image.
For the first dataset, we have manually annotated ap-
proximately 360 characteristic points in the set of live
images, after which the exact same points were an-
notated in the registered historic images for every ex-
periment. This resulted in a total of 1,800 manually
annotated points for our first dataset. For the second
dataset, we manually annotated 130 points for each
displacement, resulting in a total of 650 annotations
for this dataset. We employ the Euclidean distance (in
pixels) between the annotated points in the live and
registered images as a metric for the alignment accu-
racy of the proposed registration approach, including
the box-diorama model.
The registration accuracy is defined as the per-
centage of annotations with an alignment error up to
5 pixels on images having 1920 × 1440 pixels. All
presented results are based on the initial registration
up to and including Stage 3 of the registration appro-
ach in Figure 2.
5.2 Evaluation
Figure 9 shows the registration accuracy when the
proposed diorama-box model is used as a 3D model
for scene alignment on our first dataset. Even without
any post-processing, we achieve an accuracy of 90%
after initial alignment. When slanting is not consi-
dered, the stixel interpolation improves the registra-
tion accuracy from 90% to 93%. The stixel slanting
further improves the accuracy to 96%. This is also
reflected in Figure 10, which even shows that most
annotations have an alignment error below 2 pixels.
Moreover, Figure 9 shows that already 79% of all an-
notations have an alignment error of 1 pixel or less on
our first dataset.
Figure 10 portrays the histograms of the alignment
errors. The reader may wonder about the 15+ pixel re-
gistration errors in the figure. These are mostly anno-
0 1 2 3 4 5 6 7 8 9
Maximum alignment error
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Cumulative annotation count
original stixels
with interpolation
with slanting
with slanting and interpolation
Figure 9: Registration accuracy plotted against the maxi-
mum alignment error, showing the cumulative amount of
annotations satisfying a certain maximum alignment error.
0 5 10 15+
Alignment error (pixels)
0
0.2
0.4
0.6
Frequency
Alignment error histogram
(a) no slant, no interpolation
0 5 10 15+
Alignment error (pixels)
0
0.2
0.4
0.6
Frequency
Alignment error histogram
(b) slant, no interpolation
0 5 10 15+
Alignment error (pixels)
0
0.2
0.4
0.6
Frequency
Alignment error histogram
(c) no slant, interpolation
0 5 10 15+
Alignment error (pixels)
0
0.2
0.4
0.6
Frequency
Alignment error histogram
(d) slant and interpolation
Figure 10: Alignment error histograms when the 3D model
from Section 4 uses (a) stixels without slanting or interpo-
lation, (b) stixels with slanting but without interpolation, (c)
without slanting but with interpolation, (d) with both stixel
slanting and interpolation.
tated points that could not be registered, because that
specific part of an object was not covered by a stixel,
or because no reliable depth data was available in that
area. Such ’missing’ points are assigned to the 15+
bin.
5.3 Effect of Lateral Displacement
This experiment is performed on the second data-
set, which features different lateral displacements, i.e.
different offsets between the live and historic recor-
ding, perpendicular to the viewing direction. Such a
Fast 3D Scene Alignment with Stereo Images using a Stixel-based 3D Model
255

Table 1: Registration accuracy for different lateral displacements of the vehicle. In these experiments, we use annotations up
to a distance of 50 m. Figure 11 shows typical registration examples for each lateral displacement.
lateral 0cm lateral 160cm lateral 350cm lateral 530cm lateral 700cm
Proposed 97% 90% 71% 53% 20%
Table 2: Examples of the proposed registration for different lateral displacements. The first row illustrates the target images.
The second and third row show the source images and their corresponding disparitiy maps, respectively. The fourth row
portrays the aligned images as rendered using the proposed registration approach, where black denotes areas outside of
the Field-of-View of the historic camera. Finally, the last row shows the alignment error histograms for a specific lateral
displacement using all images in the dataset with that displacement.
Live image
(target)
Historic image
(source)
Historic
disparity
Registered
image (result)
Alignment
error histogram
0 5 10 15+
Alignment error (pixels)
0
0.1
0.2
0.3
0.4
0.5
Frequency
0 cm
0 5 10 15+
Alignment error (pixels)
0
0.1
0.2
0.3
0.4
0.5
Frequency
160 cm
0 5 10 15+
Alignment error (pixels)
0
0.1
0.2
0.3
0.4
0.5
Frequency
350 cm
0 5 10 15+
Alignment error (pixels)
0
0.1
0.2
0.3
0.4
0.5
Frequency
530 cm
0 5 10 15+
Alignment error (pixels)
0
0.1
0.2
0.3
0.4
0.5
Frequency
700 cm
Lateral
displacement:
0 cm 160 cm 350 cm 530 cm 700 cm
lateral displacement is caused by different driving tra-
jectories between the live and historic recordings, e.g.
keeping to a different driving lane. This causes sig-
nificant viewpoint differences, as shown in Figure 1.
The goal of this experiment is to identify the maxi-
mum allowed driving displacement during live opera-
tion.
Table 1 shows the registration accuracy for diffe-
rent lateral displacements for the proposed registra-
tion approach. We note that under ideal conditions,
i.e. when the live and historic driving trajectory are
almost identical, the proposed model is able to accu-
rately align 97% of all annotated points. Even at dis-
placements of 160 cm, the system is still able to align
90% of the points with an registration error of at most
5 pixels.
The decrease in registration accuracy for larger la-
teral displacements can be explained by the limited
depth accuracy of our disparity estimation algorithm,
which is outside the scope of this paper. At a distance
of 40 meters, the smallest possible disparity step cor-
responds to a jump of 25 cm. Especially at larger dis-
tances, this leads to minor inaccuracies in the depth
estimates of the stixels and hence the 3D positioning
within our scene model. This is not a problem for
small viewpoints variations (Column 2, Table 1), but
when viewed from a significantly different viewpoint,
the objects will be projected to a different coordinate
in the registered image, i.e. will be misaligned.
The figures in Table 2 show typical examples of
the input and output of our registration framework for
different lateral displacements. Some holes in the re-
gistered images, such as part of the lantern pole mis-
sing in the second column of the table, are caused by
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
256
lack of any depth estimates in that area of the disparity
map. Without depth data, no 3D object can be mo-
deled at that location. In the case of the 700-cm dis-
placement (Column 6), the only objects that remain
in the overlapping Field-of-View lie too far away to
be modeled with sufficient accuracy, hence the lower
accuracy in Column 6 of Table 1.
We argue that the proposed model performs well
for small to medium lateral displacements, e.g. up
to and including 160 cm, while it is still able to align
the majority of the scene for displacements of 350 cm,
e.g. the typical distance between adjacent driving la-
nes. We note that displacements above 4 m exceed
the operational range of the proposed registration sy-
stem, although part of the scene can still be aligned
for such extreme trajectory differences. Note from Ta-
ble 2, Column 6, that the overlapping Field-of-View
of the live and historic view has become too small and
lies in the area where accurate depth information is no
longer available.
5.4 Timing
Table 3 shows the execution times of the alignment
approach when we extend the baseline method in Fi-
gure 2 with the proposed diorama-box model. Times
are shown for both separate execution and under full
CPU/GPU load, i.e. when running all pipestages si-
multaneously. Considering our HD+ stereo camera
is restricted to 6 fps, the pipelined implementation
operates at near real-time speed with 4 fps (including
scheduling overhead).
Table 3: Execution times of the proposed registration ap-
proach with the box-diorama model included. Stage 1 and
2 involve the 3D Scene reconstruction from Figure 2, while
Stage 3 both estimates the 3D transformation and simulates
the live viewpoint (Block 2 and 3 in Fig. 2). The third co-
lumn shows the execution times when the different pipeline
stages are executed simultaneously, i.e. under full load. The
(*) denotes that tasks can execute in parallel on CPU and
GPU.
t (ms)
t (ms)
full load
Pipelined Stage 1:
GPU: Depth estimation 90 153
Pipelined Stage 2
CPU: Ground mesh* 130 200
GPU: 3D stixels mesh* 125 160
Pipelined Stage 3
CPU: Find 3D pose diff 100 120
GPU: Viewpoint synthesis 30 46
6 DISCUSSION &
RECOMMENDATIONS
We have introduced a diorama-box model for alig-
ning images with viewpoint differences. The propo-
sed work is part of a larger change detection system
comparable to (van de Wouw et al., 2016), which aims
at finding suspicious changes in the environment of
undefined shape and nature, w.r.t. a previous recor-
ding. Scene alignment is a crucial aspect of this sy-
stem, since without proper alignment the scene can-
not be compared and changes may be missed. By
extending the 3D ground-surface model of the base-
line system with 3D objects, the operational range of
the change detection system is significantly improved,
where the analysis is no longer limited to the ground
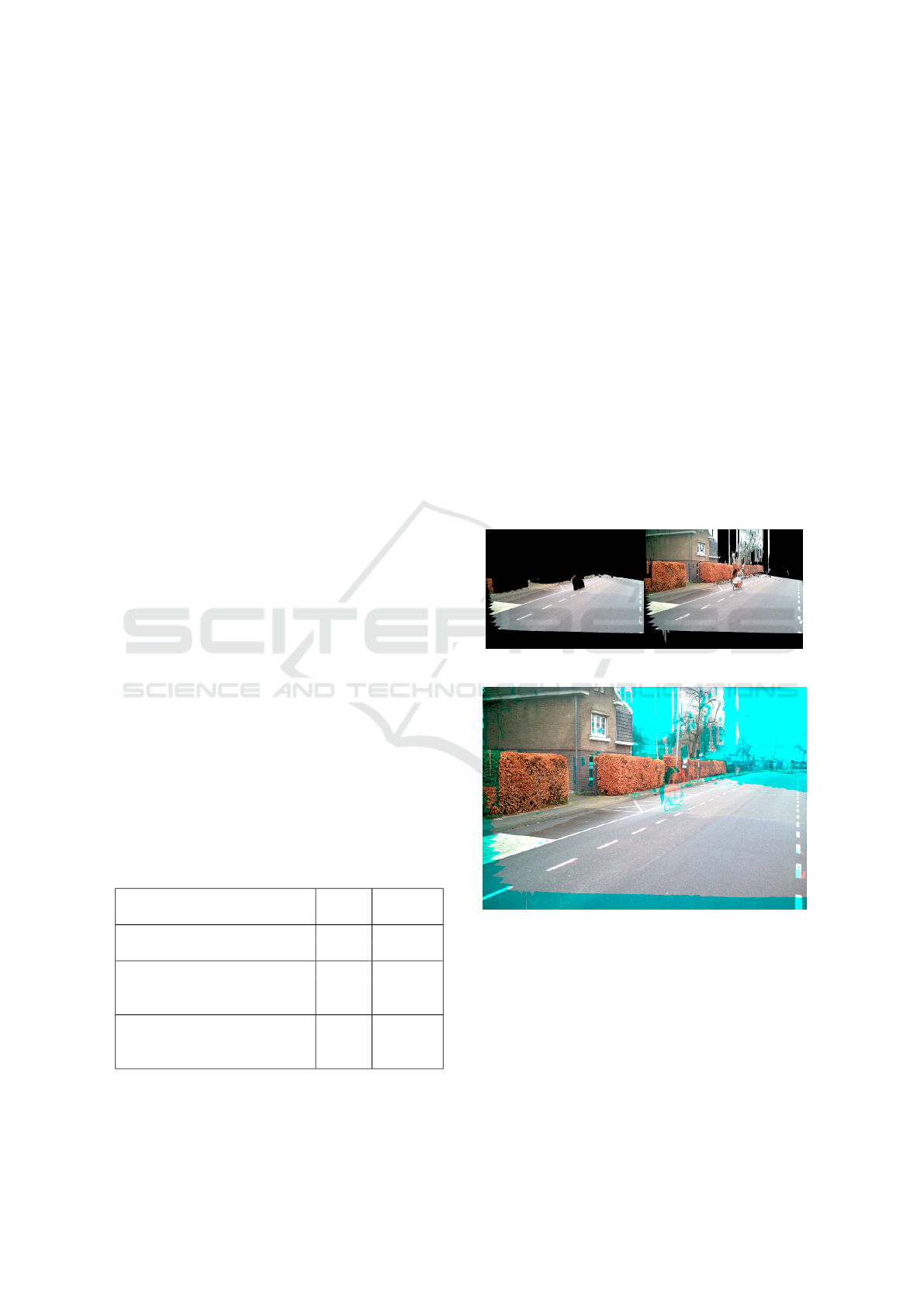
surface. Figure 11 shows the aligned images with and
without the proposed model, clearly showing the im-
proved alignment coverage, i.e. a larger part of the
scene can be exploited for change detection.
(a) (b)
(c)
Figure 11: Aligned images when using (a) ground-surface
model from (van de Wouw et al., 2016), (b) proposed model
including the 3D objects. Subfigure (c) shows an overlay of
the live image (cyan) and the aligned historic scene (red).
Although the proposed work has similarities with
the multi-view registration approaches discussed in
Section 2, we cannot use the datasets introduced in
their work. These datasets typically feature mono
images from different viewpoint, whereas we need
stereo images or a disparity map in our approach.
Fast 3D Scene Alignment with Stereo Images using a Stixel-based 3D Model
257

It was observed that rejecting invalid pixels within
stixels occasionally results in small holes in the regis-
tered images at locations where no disparity estimate
is available. Although such holes can mostly be avoi-
ded by using a morphological-closing filter prior to
rejecting the pixels, some holes may persist. Howe-
ver, the downside of having small holes in the registe-
red image did not outweigh the benefit of having a cle-
aner texture projection. We plan to look into guided-
image filtering to prevent such holes and further refine
the stixel boundaries in future work.
The current disparity estimation, which is outside
the scope of this work, is noisy and has a very limited
sub-pixel resolution. We hypothesize that a more ex-
pensive disparity estimation algorithm, increased ba-
seline or zoom-lenses will improve the depth accu-
racy, which in turn will extend the operational range
of the proposed 3D model.
7 CONCLUSION
We have introduced a diorama-box model for aligning
images acquired from a moving vehicle. The propo-
sed model extends the non-linear ground surface mo-
del (van de Wouw et al., 2016) with a model of the
3D objects in the scene. For this purpose, the Stixel
World algorithm is used to segment the scene into
super-pixels, which are projected to 3D to form an
obstacle model. The consistency of the stixel-based
model is improved by assigning a slanting orienta-
tion to each 3D stixel and by interpolating between
the stixels to fill gaps in the 3D model. Conse-
quently, registration accuracy is increased by 6%. As
a further improvement of the algorithm, background
pixels contained in object-related stixels are removed
by checking their consistency with the stixel-slanting
orientation. This improvement prevents ghosting ef-
fects, due to falsely projected background pixels.
The resulting alignment framework shows good
results for typical driving scenarios, in which both
live and historic recordings were acquired from the
same driving lane. In this case, 96% of all manu-
ally annotated points are registered with an alignment
error up to 5 pixels for images with a resolution of
1920 × 1440 pixels, where even 79% of the annotati-
ons have an error of unity pixel or lower. Even when
driving in an adjacent lane, the system is able to accu-
rately align 71% of all annotated points.
It was found that the disparity resolution of the
depth map, i.e. the lack of sub-pixel accuracy, limits
the accuracy of the 3D model, making it less effective
for displacements above 4 meters. Nevertheless, the
proposed work significantly improves the operatio-
nal range of the real-time change detection system,
which now covers the full 3D scene, instead of only
the ground plane. Higher accuracies and/or perfor-
mance of the change detection system can be achie-
ved when important parameters are improved, such as
lenses and/or a larger baseline, together with a more
accurate depth estimation algorithm.
REFERENCES
Achanta, R., Shaji, A., Smith, K., Lucchi, A., Fua, P., and
Susstrunk, S. (2012). Slic superpixels compared to
state-of-the-art superpixel methods. IEEE Trans. Pat-
tern Anal. Mach. Intell., 34(11):2274–2282.
Broggi, A., Cattani, S., Patander, M., Sabbatelli, M., and
Zani, P. (2013). A full-3d voxel-based dynamic ob-
stacle detection for urban scenario using stereo vi-
sion. In Intelligent Transportation Systems-(ITSC),
2013 16th International IEEE Conference on, pages
71–76. IEEE.
Chauve, A. L., Labatut, P., and Pons, J. P. (2010). Ro-
bust piecewise-planar 3d reconstruction and comple-
tion from large-scale unstructured point data. In 2010
IEEE Computer Society Conference on Computer Vi-
sion and Pattern Recognition, pages 1261–1268.
Cordts, M., Rehfeld, T., Enzweiler, M., Franke, U., and
Roth, S. (2016). Tree-structured models for efficient
multi-cue scene labeling. IEEE Transactions on Pat-
tern Analysis and Machine Intelligence.
Felzenszwalb, P. F. and Huttenlocher, D. P. (2004). Effi-
cient graph-based image segmentation. International
Journal of Computer Vision, 59(2):167–181.
Labatut, P., Pons, J.-P., and Keriven, R. (2009). Robust and
efficient surface reconstruction from range data. In
Computer graphics forum, volume 28, pages 2275–
2290. Wiley Online Library.
Lou, Z. and Gevers, T. (2014). Image alignment by piece-
wise planar region matching. IEEE Transactions on
Multimedia, 16(7):2052–2061.
Maiti, A. and Chakravarty, D. (2016). Performance analy-
sis of different surface reconstruction algorithms for
3d reconstruction of outdoor objects from their digital
images. SpringerPlus, 5(1):932.
Natour, G. E., Ait-Aider, O., Rouveure, R., Berry, F., and
Faure, P. (2015). Toward 3d reconstruction of outdoor
scenes using an mmw radar and a monocular vision
sensor. Sensors, 15(10):25937–25967.
Pfeiffer, D.-I. D. (2012). The stixel world. PhD thesis,
Humboldt-Universit
¨
at zu Berlin.
Salman, N. and Yvinec, M. (2010). Surface reconstruction
from multi-view stereo of large-scale outdoor scenes.
International Journal of Virtual Reality, 9(1):19–26.
Sanberg, W. P., Do, L., and de With, P. H. N. (2013). Flex-
ible multi-modal graph-based segmentation. In Ad-
vanced Concepts for Intelligent Vision Systems: 15th
International Conference, ACIVS 2013, Pozna
´
n, Po-
land, October 28-31, 2013. Proceedings, pages 492–
503. Springer International Publishing.
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
258

Strom, J., Richardson, A., and Olson, E. (2010). Graph-
based segmentation for colored 3d laser point clouds.
In Intelligent Robots and Systems (IROS), 2010
IEEE/RSJ International Conference on, pages 2131–
2136. IEEE.
Su, H. R. and Lai, S. H. (2015). Non-rigid registration of
images with geometric and photometric deformation
by using local affine Fourier-moment matching. Pro-
ceedings of the IEEE Computer Society Conference
on Computer Vision and Pattern Recognition, 07-12-
June:2874–2882.
van de Wouw, D. W. J. M., Dubbelman, G., and de With,
P. H. N. (2016). Hierarchical 2.5-d scene alignment
for change detection with large viewpoint differences.
IEEE Robotics and Automation Letters, 1(1):361–368.
van de Wouw, D. W. J. M., Pieck, M. A., Dubbelman, G.,
and de With, P. H. (2017). Real-time estimation of
the 3d transformation between images with large vie-
wpoint differences in cluttered environments. Electro-
nic Imaging, 2017(13):109–116.
Veksler, O., Boykov, Y., and Mehrani, P. (2010). Super-
pixels and supervoxels in an energy optimization fra-
mework. In European conference on Computer vision,
pages 211–224. Springer.
Werlberger, M., Pock, T., and Bischof, H. (2010). Mo-
tion estimation with non-local total variation regula-
rization. In 2010 IEEE Computer Society Conference
on Computer Vision and Pattern Recognition, pages
2464–2471.
Yamaguchi, K., McAllester, D., and Urtasun, R. (2014). Ef-
ficient Joint Segmentation, Occlusion Labeling, Stereo
and Flow Estimation, pages 756–771. Springer Inter-
national Publishing, Cham.
Zhang, G., He, Y., Chen, W., Jia, J., and Bao, H. (2016).
Multi-Viewpoint Panorama Construction with Wide-
Baseline Images. IEEE Transactions on Image Pro-
cessing, 25(7):3099–3111.
Fast 3D Scene Alignment with Stereo Images using a Stixel-based 3D Model
259
