
Simulation-based Optimization of Camera Placement in the Context of
Industrial Pose Estimation
Troels B. Jørgensen
1
, Thorbjørn M. Iversen
1
, Anders P. Lindvig
1
, Christian Schlette
1
, Dirk Kraft
1
,
Thiusius R. Savarimuthu
1
, J
¨
urgen Roßmann
2
and Norbert Kr
¨
uger
1
1
Mærsk McKinney Møller Institute, University of Southern Denmark, 5230, Odense M, Denmark
2
Institute for Man-Machine Interaction, RWTH Aachen University, 52074, Aachen, Germany
Keywords:
Pose Estimation, Simulation, Optimization.
Abstract:
In this paper, we optimize the placement of a camera in simulation in order to achieve a high success rate for
a pose estimation problem. This is achieved by simulating 2D images from a stereo camera in a virtual scene.
The stereo images are then used to generate 3D point clouds based on two different methods, namely a single
shot stereo matching approach and a multi shot approach using phase shift patterns. After a point cloud is
generated, we use a RANSAC-based pose estimation algorithm, which relies on feature matching of local 3D
descriptors.
The object we pose estimate is a tray containing items to be grasped by a robot. The pose estimation is done
for different positions of the tray and with different item configuration in the tray, in order to determine the
success rate of the pose estimation algorithm for a specific camera placement. Then the camera placement
is varied according to different optimization algorithms in order to maximize the success rate. Finally, we
evaluate the simulation in a real world scene, to determine whether the optimal camera position found in
simulation matches the real scenario.
1 INTRODUCTION
When designing vision-based solutions for industrial
systems, the placement of the vision sensor is rarely
investigated in detail. Usually, it is simply placed
where there are space and no obvious occlusion. This
is a suboptimal choice and in some cases it can have
a significant impact on the overall success rate of an
industrial system. In this paper, we investigate the ca-
mera placement using a simulation framework to opti-
mize the success rate of a pose estimation application.
There are many advantages of relying on simula-
tion. One is that the basic algorithm can be written
and tested before the actual setup is built. Tests on
real platforms require physical re-arrangements and
re-calibration as well as the performance of many tri-
als where pose estimates need to be manually evalua-
ted in terms of their correctness. Transferring this op-
timization to simulation allows for doing these tests
with simple re-arrangement in simulation with au-
tomated calibration and automated comparison with
ground truth data. Furthermore, it is feasible to do
substantially more experiments, since the only cost is
computation time. This even allows for applying gra-
dient decent like methods to operate on an objective
function instead of unsystematic trial and error on real
platforms. Hence by transferring this process to si-
mulation, set-up times of vision based robot solutions
can be significantly reduced.
Researchers have shown that it is these costs in
the set-up of robot assembly processes, that make it
hard to arrive at commercially viable robot solutions
for small batch size production, which is in particu-
lar relevant for SMEs (Kr
¨
uger et al., 2014). However,
photo-realistic rendering is a difficult and computati-
onally expensive task. Therefore, we focus on simpler
and more computationally feasible rendering approa-
ches from the robotic simulation framework VERO-
SIM. Since the images are imperfect, we evaluate the
solutions in the real world as well to show the validity
of the approach.
Simulation-based investigation of robotic soluti-
ons using general purpose simulation frameworks is
an expanding field. For example, the eRobotics met-
hodology provides a development platform for robo-
ticists to exchange ideas and to collaborate with ex-
perts from other disciplines (Schluse et al., 2013).
eRobotics aims at providing comprehensive digital
524
Jørgensen, T., Iversen, T., Lindvig, A., Schlette, C., Kraft, D., Savarimuthu, T., Rossmann, J. and Krüger, N.
Simulation-based Optimization of Camera Placement in the Context of Industrial Pose Estimation.
DOI: 10.5220/0006553005240533
In Proceedings of the 13th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2018) - Volume 5: VISAPP, pages
524-533
ISBN: 978-989-758-290-5
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Figure 1: The pose estimation scene. Left) The scene in simulation along with the most important parameters for the sensor
placement. BL is the base-line, β is the vergence, α is the polar angle and r is the radial distance. Right) The real world setup
used for evaluating the realism of the simulated results.
models of complex technical systems and their inte-
raction with prospective working environments in or-
der to design, program, control and optimize them
in 3D simulation before commissioning the real sy-
stem. In this paper, we utilize the eRobotics frame-
work VEROSIM
R
for simulating the system
1
, such
that the approach can be easily integrated into a more
complex industrial system.
Utilizing the simulation framework, we investi-
gate whether 3D simulation-based optimization can
be used to improve the pose estimation success rate
of a test case. The case addressed in this paper is a
pose estimation problem, where a tray containing a
random set of items has to be detected. The task is il-
lustrated in Figure 1 and the parameters we optimize
are the placement of the sensor. In Figure 1, it can
be seen that the tray is bright compared to the dark
items placed in it. This further complicates the task
when relying on structured light, since the reflective
properties are quite different for the two materials.
The goal of the paper is not to find a single set
of parameters that work well for every problem, but
rather to investigate a simulation-based approach for
determining case specific parameters for a given task.
Therefore, we apply the method to two different trays
and show the performance for both cases.
To solve the pose estimation problem, we start by
generating a point cloud using a stereo camera and
a projector. We then use RANSAC in combination
with point cloud based feature matching to determine
a likely pose of the tray. Here, the model of the tray
1
see http://www.verosim-solutions.com/en/
used during pose estimation is based on multiple view
points of the tray and multiple combinations of items
in the tray.
The main contributions of the paper are the follo-
wing:
• By computing comprehensively an objective
function for pose estimation in a simulated robot-
vision set-up in a relevant parameter range of ca-
mera placements, we demonstrated that the ca-
mera placement plays an important role for the
success rate of a pose estimation algorithm.
• By brute force computation of pose estimation
quality, we were able to determine a good camera
placement in terms of the polar angle and the ra-
dial distance for the given task.
• By optimizing the objective function by means
of the numeric optimization algorithm RBFopt
(Costa and Nannicini, 2015), we were able to op-
timize additional parameters namely the baseline
and vergence. This resulted in higher success ra-
tes compared to simply optimizing the polar angle
and radial distance with brute force optimization.
• By comparing the results achieved in simulation
and on a real set-up, we show that camera place-
ments with high success rates in simulation mat-
ched camera placements with high success rates in
the real world. Furthermore, we evaluated the full
brute force optimization in simulation and in the
real world, here we show that the pose-estimation
success rate is similar in simulation and in the real
world.
Simulation-based Optimization of Camera Placement in the Context of Industrial Pose Estimation
525

The paper is structured as follows. In Section 2,
we discuss related work with regard to image simula-
tion, pose estimation and optimization. In Section 3,
we introduce the pose estimation pipeline and dis-
cuss the free parameters and the quality metrics. In
Section 4, we discuss the simulation of images and
the two stereo-based approaches used to generate the
point clouds. In Section 5, we discuss the pose es-
timation algorithm in more detail. In Section 6 and
7, we show the optimization results and evaluate the
realism of the simulation results based on real world
trials. Lastly, we conclude on the work and discuss
future extensions in Section 8.
2 RELATED WORK
This paper addresses simulation-based optimization
of camera placements. Several researchers have ad-
dressed similar problems, e.g. (Mavrinac et al., 2015)
where an active triangulation 3D inspection system
is configured using model-based optimization. The
critical system parameters are optimized using parti-
cle swarm optimization. Another noteworthy article
is presented by (Kouteck
`
y et al., 2015), where the op-
timal position of an active light scanner is determined
for the reconstruction of highly reflective objects. To
improve the realism of the simulated scans in the opti-
mization, the reflective properties of the object mate-
rial is empirically determined prior to the simulation.
For an excellent survey of related literature refer to
(Chen et al., 2011).
In this work, we address simulation-based optimi-
zation of camera placement, in order to maximize the
success rate of a pose estimation application. Because
of this both the geometry of the object and a rough
model of the 3D reconstruction method are important.
But we claim that highly realistic simulated images
are not required for this type of pose estimation, un-
like (Kouteck
`
y et al., 2015), thus we have focused on
simulations that are easy to setup and model, and real
world evaluations indicating that the optimal sensor
placement in simulation is also good in the real world
(see Section 7). Furthermore, we include several ty-
pes of uncertainties from the real world in the simu-
lation, such as background illumination, to ensure the
camera placement is robust to the most common vari-
ations.
The remainder of this section is split into the three
main topics of the paper, namely simulation or rende-
ring of 2D images, pose estimation in 3D and nume-
ric optimization. In the simulation part, we focus on
relatively fast rendering methods with application to
the robotics domain. In the pose estimation section,
we focus on pose estimation based on 3D point cloud
data. In the optimization section, we focus on robust
optimization methods with applications to simulation-
based optimization.
2.1 Simulation and Rendering of 2D
images
Synthetic images have been used in the literature for
various different tasks, e.g. training (Rozantsev et al.,
2015), uncertainty analysis (Dong et al., 2014), ana-
lysis of visual features (Takei et al., 2014) and off-line
programming (Nilsson et al., 2009).
In order to use synthetic images in the context of
computer vision, it is crucial that the images are suf-
ficiently realistic such that the computer vision algo-
rithms show similar behavior for the real and synthe-
tic images. However, when rendering synthetic ima-
ges a trade off must be made between realism and ren-
dering speed.
In work presented by (Medeiros et al., 2014),
structured light scanners are benchmarked in simu-
lation using highly realistic synthetic images. These
images are generated using ray tracing which mi-
mics the physical properties of light rays. Physically-
based rendering is however a time consuming techni-
que which makes it unattractive in an optimization
framework, where convergence requires many itera-
tions and thus the generation of many images.
In work presented by (Irgenfried et al., 2011), the
trade off between speed and realism have been hand-
led by developing a system, which allows for both real
time rasterization-based renderings with low realism
or slower ray tracing-based renderings with a high de-
gree of realism.
In work presented by (Rossmann et al., 2012), a
compromise between realism and rendering speed is
made by combining real time rasterization techniques
with advanced lighting and noise modeling. They also
document a test setup which is used to verify that the
generated images actually resembles the real world
images. We have opted for this last approach since
it allows us to incorporate high quality synthetic ima-
ges in a state-of-the-art optimization procedure.
2.2 Pose Estimation
Pose estimation of 3D objects is a common task in ro-
botics (Aldoma et al., 2012), (Papazov and Burschka,
2010) and (Großmann et al., 2015). But in this work,
we focus on the task of pose estimating a tray, con-
taining a random subset of items. In order to achieve
pose estimation with a high success rate, it is neces-
sary to implement a pose estimation strategy that is
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
526

not substantially affected by missing items. This task
is less explored, but a somewhat similar task arises
in articulated pose estimation of humans, where it is
also necessary to estimate the pose based on various
subcomponents of the entire object. Various appro-
aches exist for solving this problem, such as data-
base lookups to determine similar configurations (Ye
et al., 2011), and ICP refinement based on splitting
the human into sub-components and fine tuning these
(Knoop et al., 2006).
Since the items, in our pose estimation case, are
placed similarly relative to other items in the tray,
fully articulated pose estimation was considered un-
necessary. Therefore we chose a more classical pose
estimation strategy similar to (Jørgensen et al., 2015),
where the model of the object is extended as discussed
in Section 3. In the pose estimation algorithm, des-
criptors are matched between the scene and the object,
and then a RANSAC approach is used to determine a
likely pose of the object. The implementation of the
RANSAC algorithm is based on a method presented
by Buch et al. (Buch et al., 2013).
2.3 Numeric Optimization
Numeric optimization is a wide topic in mathematics.
In this work, we focus on bound global optimization,
where the task is to find the solution, x, that returns
the highest objective score, f (x). Furthermore, the
potential solutions are limited by some bounds x
min
and x
max
. This is formalized in (1).
x
opt
= argmax
x∈R
n
|x
min
5x5x
max
f (x) (1)
In this work, x is the parameters specifying the
placement of the sensors, and f (x) is the resulting
success rate of the pose estimation algorithm. The
simplest way to find a decent solution is likely
through a brute-force search over the free parameters.
Unfortunately, this becomes computationally expen-
sive for high dimensional parameter spaces. Various
algorithms have been designed to find decent soluti-
ons within less function evaluations. A review of se-
veral search strategies is given in (Rios and Sahinidis,
2013). In our work, we use a brute-force search to
find good solutions and to get a map of the search
space for 2 dimensions. Furthermore, we extend the
sensor placement to 4 parameters and use the optimi-
zation algorithm RBFopt (Costa and Nannicini, 2015)
to find good solutions.
Figure 2: Overview of the pose estimation pipeline. Round
elements indicate sensors, square elements indicate soft-
ware blocks and the sub-boxes indicate signals and data
transfer between the software blocks.
3 THE SIMULATION SYSTEM
In this section, we introduce the elements of the pose
estimation pipeline shown in Figure 2. The pipeline
can be seen as a function evaluation, f (x), where
the final “Quality” corresponds to the value of the
function.
The vector x = (r, α, BL, β)
T
corresponds to the 4
variables shown in Figure 1, r is the radial distance, α
is the polar angle, BL is the baseline and β is the ver-
gence. Furthermore, the sensor always points towards
the center of the table with the tray. In order to find
good camera placements, basic optimization methods
can then be used to adjust x, to find the highest quality
f (x).
Now that the overall approach is described, we
will go into more detail with the individual parts of the
pose estimation pipeline. The first step is to generate
a background depth map, which can be used for back-
ground removal. To achieve this, the “Background
Capture” block removes the tray from the scene and
requests the “Background 3D sensor” to capture a
depth map of the scene. This depth map is given to
the ”Background Modifier” block, which dilates the
background to help reduce the effect of noise. After-
wards, the modified depth map is made available for
the “Stereo Vision” block, and the “Tray Model Ge-
nerator” block is activated.
To model the object, a point cloud has to be cap-
Simulation-based Optimization of Camera Placement in the Context of Industrial Pose Estimation
527

tured from several viewpoints. Furthermore, the tray
contains several slots, for placing items. Examples
where the slots are empty and full also have to be con-
sidered in the overall object model. The object model
is generated by removing all of the scene except the
tray, and all the items in the tray. Then point clouds
are captured from all viewpoints using the “Tray 3D
Sensor”. In this work, we use 6 viewpoints, where the
object is rotated around the z-axis in steps of 60
◦
, this
was chosen to cover the object without producing too
much overlap. For each viewpoint (slots + 1) point
clouds are captured to model the effects of whether
the slots are empty or not. This is done by first cap-
turing a point cloud of the tray containing all items.
Then the closest item is iteratively removed until the
tray is empty. In our case the trays we test have
4 and 8 slots. After all the point clouds are captu-
red, they are down-sampled to the surface resolution,
SRes, (see Table 1).
The next step in the “Tray Model Generator”
block is to compute point features. In this work, the
ECSAD feature (Jørgensen et al., 2015) is used. The
features are computed on each of the individual point
clouds in the model. After the features are compu-
ted, the point clouds are combined into a single point
cloud and feature cloud pair, which can be used in the
RANSAC algorithm.
Besides just building a point cloud model for the
initial pose estimation, we also build a set of point
clouds for fine tuning the pose with ICP. This is done
by generating a point cloud for each view point, by
simply combining the point clouds with differently
filled slots into one. Then the combined point cloud
is down-sampled to the surface resolution. Lastly, the
view points of the ICP point clouds are stored, such
that they can be used to determine which of the 6 point
clouds should be used for the ICP algorithm. An ex-
ample of an ICP point cloud can be seen in Figure 4,
where it is used to indicate the believed pose of the
tray.
When the model is generated it is made available
for the “Pose Estimation” block, and the “Stereo Vi-
sion” block is activated. This block generates a point
cloud based on a set of captured stereo images, accor-
ding to Section 4. After a point cloud is generated, it
is made available for the “Pose Estimation” block.
Finally, the “Pose Estimation” block determines
the pose of the object according to Section 5. During
this computation, four quality metrics are computed,
namely the positional error, the rotational error, the
number of correct feature matches and whether the
pose estimation was a success or not. A success is de-
fined as a pose estimate, where the positional error is
less than 3mm and the rotational error is less than 5
◦
.
These values are chosen to ensure a fairly precise pose
is known for future manipulation tasks. A correct fea-
ture match is defined to be a match where the features
based on the ground truth transformation are less than
4.5mm apart from each other. This distance is chosen
slightly bigger than the success requirement, since the
feature matches are an indicator of the pose estima-
tion quality, and here it turned out a slightly larger
radius produced a higher correlation between feature
matches and success rate.
To wrap the entire pipeline into a function with
some statistical significance, we evaluate it for multi-
ple scenarios. The differences between the scenarios
are the placement of the tray, the filling of the tray
and the placement of the lighting. For each evaluation
we evaluate the off-line part, in Figure 2, 250 times.
Each of the 250 evaluations returns the four men-
tioned quality metrics, which are analyzed to com-
pute the success rate, the average feature matches, the
average positional error and the average rotational er-
ror.
4 SENSORS - SIMULATION AND
REAL WORLD
In this work, we test two different stereo vision met-
hods for generating the point clouds used during pose
estimation. The first method is to project a rando-
mized pattern on the scene, to get more texture, and
then use the “LibElas” (Geiger et al., 2010) stereo vi-
sion algorithm to generate a depth map. We refer to
this method as the one shot method. Examples of a
real and simulated image and the corresponding depth
maps for this method are shown in Figure 3.
The second method is a 12 shot structured light
approach, here a phase shift pattern consisting of 12
different sinusoidal images are projected on the scene.
The point cloud is then generated based on the 12 re-
sulting stereo image pairs and phase-unwrapping of
the projected pattern (Huntley and Saldner, 1993).
Both sensors are simulated in VEROSIM using
cameras with a resolution of 640x480 and a horizontal
field of view of 43
◦
. The projected light is simulated
by an OpenGL-based projector with a changeable pat-
tern (Everitt, 2001). After the images are captured,
noise and smoothing are added to make the images
more realistic. In particular, we add uniform random
noise with a range of ±10 to each pixel, and then we
smooth the image with a mean filter over 3x3 pixels.
As seen in Section 6, the one shot stereo approach
gave the most robust results in simulation. Therefore,
we chose this method for the real world validation. In
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
528

a b
c d
Figure 3: Simulated and real images. a) shows the simu-
lated left camera image. b) shows the corresponding depth
map after background subtraction. c) shows the real left
camera image. d) shows the corresponding depth map.
the real world tests we used a “Bumblebee” camera
2
and a “Qumi” projector
3
. As seen in Figure 3 there
are some differences between the 2D images, but the
resulting depth maps are similar.
5 POSE ESTIMATION
In Section 3, we discussed how the tray model was
generated, such that it is ready to use for a RANSAC
algorithm. In Section 4 we discussed how the point
clouds of the scene are generated. Now to apply the
pose estimation, the first step is to down-sample the
scene cloud to surface resolution, SRes, and compute
the ECSAD features for the scene. After the featu-
res are computed, they are matched to the tray model
using a k nearest neighbor search (k is given in Ta-
ble 1).
The next step is to reject inconsistent feature ma-
tches, this is done by ensuring that the z-coordinate
of the object feature corresponds to scene features
placed similarly above the table within a band of
±20mm. Now that the feature matches are prepared
we use a slightly modified version of a RANSAC al-
gorithm presented by Buch et al. (Buch et al., 2013).
The modification we add is a quick rejection step,
which occurs if the guessed pose does not correspond
to the tray being placed on the table. This is determi-
2
The camera used is a “Bumblebee” with a 43
◦
HFOV
and a resolution of 1024x768 - https://eu.ptgrey.com/
bumblebee2-08-mp-mono-firewire-1394a-6mm-sony-
icx204-2-eu
3
The projector is a “Qumi Q5-WT” with a re-
solution of 1280x800 - http://www.vivitek.eu/Category/
Pocket-Personal-Projectors/3/Qumi-Q5
Objects missing in the scene
Figure 4: Pose estimation of the tray, the red points are the
scene cloud and the white points are an up-sampled ver-
sion of the tray cloud used during ICP. Notice the encircled
areas, where it can be seen that the partially see-through
model helps to produce more inliers when items are mis-
sing.
ned based on a threshold that allows the object to be
placed ±20mm above the table, and with an error on
rotation of less than ±10
◦
.
In the RANSAC algorithm, we evaluate the fitness
of the guesses based on an inlier count, which is de-
termined based on the scene and an ICP model. The
ICP model is chosen as the one, which view point is
closest to the scene view point. The number of RAN-
SAC iterations, RIt, is given in Table 1.
After a match is found, the final step is to run an
ICP algorithm to fine tune the pose. This is done by
selecting the ICP model, which view point is closest
to the scene view point. The ICP algorithm runs for
ICPIt iterations or until convergence. An example of
a pose estimate after ICP is given in Figure 4.
All the key parameters of the pose estimation al-
gorithm is given in Table 1. SRes are chosen based on
(Jørgensen et al., 2015). k, RIt and ICPIt are chosen
to be fairly high compared to (Jørgensen et al., 2015).
This ensures a higher success rate at the cost of com-
putation time.
Table 1: Pose estimation parameters.
SRes k RIt ICPIt
2.0mm 25 100000 100
6 RESULTS - OPTIMIZATION IN
SIMULATION
Several steps were taken, to determine good solutions
based on optimization. The first was to plot the ob-
jective function surfaces. This was done by varying
Simulation-based Optimization of Camera Placement in the Context of Industrial Pose Estimation
529

a
◦
b
◦
c
◦
d
◦
e
◦
f
◦
g
◦
h
◦
Figure 5: Brute force optimization for the 8 slot tray. The
left side shows the result for one shot stereo, and the right
side shows the results for 12 shot structured light. The green
circles indicate where the success rate is highest.
the radial distance and the polar angle of the camera
system (see Figure 1) and then plotting the resulting
quality measures. The plots for the tray with 8 slots
are shown in Figure 5 and the plots for the tray with
4 slots are shown in Figure 6. Both dimensions were
sampled in 5 steps and for each point, 250 simulati-
ons were evaluated to enable statistical analysis of the
results. This corresponds to 5x5x250 = 6250 simula-
tions to generate values for the surface.
The results show that the one shot approach tends
to produce the best pose estimation results in terms
of success rate (see Figure 5 and 6, a and b). But
the 12 shot approach tends to produce more precise
point clouds when the camera is close to the object.
Unfortunately, they also contain more outliers. This is
seen by the higher number of correct feature matches
for the 12 shot approach when the camera is close. It
should be noted that the two different trays produce
quite similar plots, so the same camera position can
a
◦
b
◦
c
◦
d
◦
e
◦
f
◦
g
◦
h
◦
Figure 6: Brute force optimization for the 4 slot tray. The
left side shows the result for one shot stereo, and the right
side shows the results for 12 shot structured light. The green
circles indicate where the success rate is highest.
be used for both trays. But the camera placement is
quite sensitive to the method that is used to generate
the point clouds, thus the system should be optimized
dependent on the method.
The results also show the number of correct fea-
ture matches (see Figure 5 and 6, c and d). The pur-
pose of this score was to test if it could be used to pre-
dict the success rate of a given camera position. This
would be beneficial, since it requires less computation
to determine. Furthermore, it is not a binary value so
it is less affected by quantification compared to the
success/fail value. For the one shot approach there is
a weak correlation, but for the 12 shot approach there
is no correlation. Thus we decided not to pursue this
further, but in the one shot approach it could be used
to narrow the search area.
The plots also show the positional error and the ro-
tational error (see Figure 5 and 6, e, f, g and h). Here it
becomes clear that the positional error is a bottleneck,
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
530
and the plots of positional error and success rate are
anti-correlated for both image sensors.
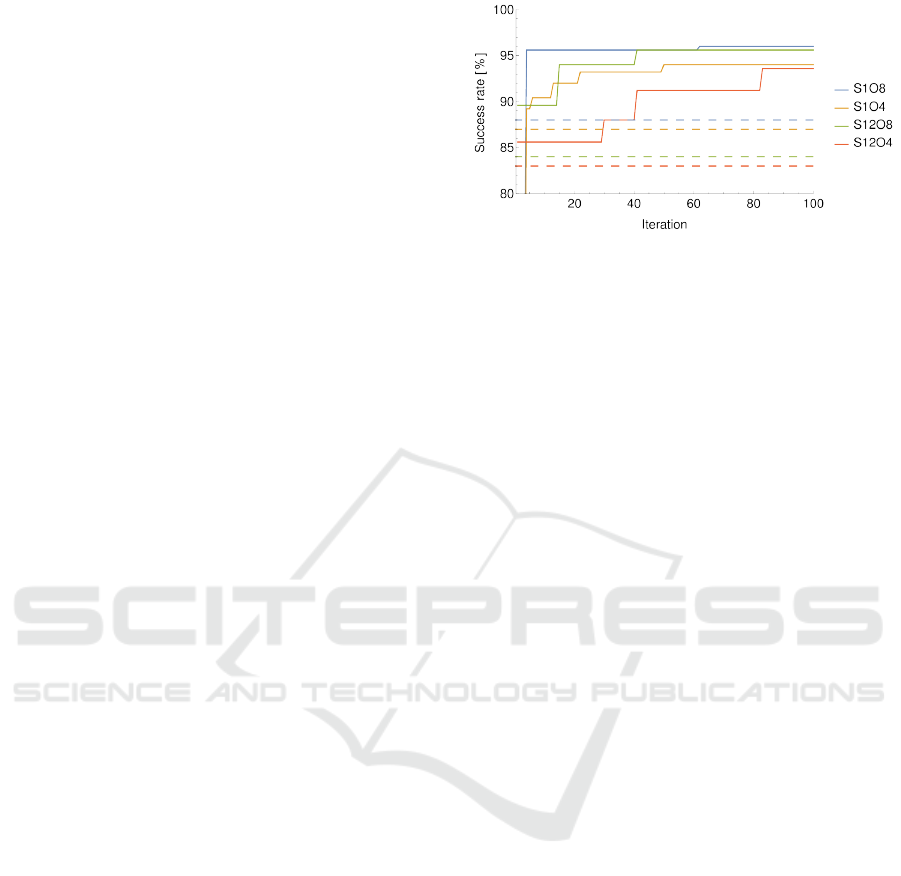
Besides simply doing brute force optimization of
the 2 parameters, we also used the optimization met-
hod “RBFopt” (Costa and Nannicini, 2015) to deter-
mine sensor placements that maximize the success
rate. This search method enabled us to optimize the
radial distance, the polar angle, the base line and the
vergence. In Figure 7, the success rate as a function
of the optimization iterations is shown. Here it can
be seen that a success rate of 96% is achieved when
4 parameters are optimized. This is higher than the
success rate of the brute force search on two parame-
ters, which only reached 88%, thus it is beneficial to
optimize more than the two parameters in the brute
force search. This is one of the reasons simulation-
based optimization is a powerful tool, since this type
of search would be unfeasible in the real world. One
way to do the search in the real world is to place 250
objects on a table and capture them from the first view
point, then the success rate would have to be determi-
ned based on manual interaction. This would have to
be done for all 100 iterations of the sequential opti-
mization algorithm, which would be very time con-
suming. An alternative would be to make an auto-
mated system that could move the sensors and then
simply capture the same dataset from all sensor posi-
tions. Unfortunately, this process requires a parallel
approach to optimization. If a brute force method is
chosen this would require 625 positions for a quanti-
fication of 5 steps per parameter, which again would
make it quite time consuming.
The optimization based on RBFopt again shows
that the one shot approach produces the most robust
solution. For the tray with 8 slots using the one shot
method, the optimal parameters are a radial distance
of 605mm, a polar angle of 32
◦
, a vergence of 3.5
◦
and a baseline of 81mm. The main reason for the im-
provement is the reduced baseline, which originally
was 120mm. The reduced baseline makes the mat-
ching task easier and increases the overlap of the ima-
ges, which makes the region covered by the resulting
depth map larger.
7 RESULTS - REAL WORLD
TRIALS
After the problem was optimized in simulation, we
tested the relevance of the simulation based on real
world trials. This was done by generating 2D plots
for the quality measures, as a function of the radial
distance and the polar angle. These plots are similar
to the simulated case using the one shot method and
Figure 7: Optimization of the success rate by tuning the 4
camera parameters using RBFopt. S1 refers to using the one
shot method and S12 refers to using the 12 shot method. O8
refers to that 8 items can be placed in the tray and O4 refers
to that 4 items can be placed in the tray. The dashed lines
correspond to the success rate of the optimal placements
from the brute force search over 2 parameters.
the 8 slot tray, the plots are shown for comparison in
Figure 8.
The real world plots were generated based on the
robotic setup shown in Figure 1. The robot was con-
figured to 25 positions, such that the sensor posi-
tion roughly matched the position used in simulation.
Then the tray was placed on the table 100 times, such
that the item configuration matched that of the simu-
lated images. For each placement the robot was mo-
ved between the 25 positions, and for each position
an image pair was taken.
Then point clouds were generated based on the
stereo images. These were then mapped to the simu-
lation scene, such that the table plane could be used
as a constraint during pose estimation. Afterwards, a
rough estimate of the cameras transformations was at-
tached to the scene for each view point, and a ground
truth label was attached to the first view point for all
100 object placements. Next, the ground truth poses
were mapped to the other 24 view points, and ICP
was used to fine tune the object poses. Then the ca-
mera poses were fine tuned to minimize the error be-
tween the individual object poses and the average ob-
ject pose over the 25 view points. This was done ite-
ratively until the error between individual object po-
ses and the average object pose had reached a sub-
millimeter level. The average pose of the objects was
then used as the ground truth pose, to avoid biasing
the ground truth based on the same ICP that is used
in the pose estimation algorithm. Now, a dataset with
high precision ground truth labels was available, and
lastly the pose estimation algorithm was used on the
dataset to determine the quality measures in Figure 8.
In Figure 8 it can be seen that there are some de-
viations between the simulated results and the real
world results. In general, the performance of the pose
Simulation-based Optimization of Camera Placement in the Context of Industrial Pose Estimation
531

a
◦
b
◦
c
◦
d
◦
e
◦
f
◦
g
◦
h
◦
Figure 8: Brute force optimization for the 8 slot tray. The
left side shows the result for one shot stereo in simulation
and the right side shows the real world equivalent. The
green circles indicate where the success rate is highest.
estimation is slightly better in the real world, this is
likely because more variation was added in the si-
mulation, to ensure the solutions are robust. Thus,
the quality of the point clouds from simulation varied
more and contained more low quality point clouds,
which made the overall success rate in simulation go
down. The main difference is the background illumi-
nation, which was nearly constant in the real world
experiments, but varied significantly in the simulated
experiments.
Another deviation is that the positional and rota-
tional errors are weakly correlated to the results in
simulation (see Figure 8, e, f, g and h). But since
the errors in the real world are quite small, it indicates
that the main source of failures is caused by RANSAC
supplying a poor estimate for ICP. Thus, highly accu-
rate simulation-based predictions of positional and ro-
tational errors are less important when determining
camera positions with a high success rate.
Overall the best positions in the simulated expe-
riments are also good in the real world, which is the
most important aspect when using simulation for opti-
mization. Thus, it is an indication that the overall ap-
proach is valid, for determining camera placements.
8 CONCLUSION AND FUTURE
WORK
In this work, a simulation system for industrial
pose estimation problems was built, to maximize the
success rate by adjusting the camera placement. The
results show that the success rate significantly de-
pends on the camera placement, especially for a dif-
ficult task where the tray is very bright and the items
in the tray are very dark. Furthermore, geometric pro-
perties of the object also influence the quality of the
pose estimation.
Overall we were able to find decent solutions in
simulation. For a “Bumblebee” camera, we achieved
a success rate of 88%, based on brute force optimiza-
tion. By using sequential optimization, we show that
a success rate of 96% can be achieved if the base line
of the camera is also adjusted.
Lastly, we tested the pose estimation pipeline in
the real world. Here the optimal camera placement
roughly matched the optimal camera placement in si-
mulation. At the optimal placement in simulation a
success rate of 96% is achieved in the real world. At
the best placement in the real world a success rate of
97% was achieved.
In the work, we showed that the simulation tool
was helpful in designing the case specific pose estima-
tion algorithm, both as a tool to determine important
poses as well as to quickly evaluate what was required
to make the partially see through view based tray mo-
del complete enough to achieve good pose estimation
results.
In summary, we have shown that we can transfer
the problem of finding suitable camera placements for
industrial pose estimation to simulation. By that, we
can provide a tool that can significantly reduce the
set-up times of robot solutions and by that can faci-
litate the application of vision based robot solutions
in industry, a problem recognized to be crucial for in
particular SMEs (Kr
¨
uger et al., 2014).
ACKNOWLEDGMENT
The financial support from the The Danish Innovation
Foundation through the strategic platform MADE-
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
532

Platform for Future Production and from the EU
project ReconCell (FP7-ICT-680431) is gratefully
acknowledged.
REFERENCES
Aldoma, A., Marton, Z.-C., Tombari, F., Wohlkinger, W.,
Potthast, C., Zeisl, B., Rusu, R. B., Gedikli, S., and
Vincze, M. (2012). Tutorial: Point cloud library:
Three-dimensional object recognition and 6 dof pose
estimation. IEEE Robotics & Automation Magazine,
19(3):80–91.
Buch, A. G., Kraft, D., Kamarainen, J.-K., Petersen, H. G.,
and Kr
¨
uger, N. (2013). Pose estimation using local
structure-specific shape and appearance context. In
Robotics and Automation (ICRA), 2013 IEEE Inter-
national Conference on, pages 2080–2087. IEEE.
Chen, S., Li, Y., and Kwok, N. M. (2011). Active vi-
sion in robotic systems: A survey of recent develop-
ments. The International Journal of Robotics Rese-
arch, 30(11):1343–1377.
Costa, A. and Nannicini, G. (2015). Rbfopt: an open-
source library for black-box optimization with costly
function evaluations. Under review.
Dong, Y., Hutchens, T., Mullany, B., Morse, E., and Da-
vies, A. (2014). Using a three-dimensional opti-
cal simulation to investigate uncertainty in image-
based dimensional measurements. Optical Engineer-
ing, 53(9):092007–092007.
Everitt, C. (2001). Projective texture mapping. White paper,
NVidia Corporation, 4.
Geiger, A., Roser, M., and Urtasun, R. (2010). Efficient
large-scale stereo matching. In Asian conference on
computer vision, pages 25–38. Springer.
Großmann, B., Siam, M., and Kr
¨
uger, V. (2015). Compa-
rative Evaluation of 3D Pose Estimation of Industrial
Objects in RGB Pointclouds, pages 329–342. Springer
International Publishing, Cham.
Huntley, J. M. and Saldner, H. (1993). Temporal phase-
unwrapping algorithm for automated interferogram
analysis. Applied Optics, 32(17):3047–3052.
Irgenfried, S., Tchouchenkov, I., W
¨
orn, H., Koci, R., Hana-
cek, P., Kunovski, J., Zboril, F., Samek, J., and Pe-
ringer, P. (2011). Cadavision: a simulation frame-
work for machine vision prototyping. In Proceedings
of the Second International Conference on Computer
Modelling and Simulation, pages 59–67.
Jørgensen, T. B., Buch, A. G., and Kraft, D. (2015). Ge-
ometric edge description and classification in point
cloud data with application to 3d object recognition.
In Proceedings of the 10th International Conference
on Computer Vision Theory and Applications (VISI-
GRAPP), pages 333–340.
Knoop, S., Vacek, S., and Dillmann, R. (2006). Sensor fu-
sion for 3d human body tracking with an articulated 3d
body model. In Robotics and Automation, 2006. ICRA
2006. Proceedings 2006 IEEE International Confe-
rence on, pages 1686–1691. IEEE.
Kouteck
`
y, T., Palou
ˇ
sek, D., and Brandejs, J. (2015). Ap-
plication of a reflectance model to the sensor planning
system. In SPIE Optical Metrology, pages 953005–
953005. International Society for Optics and Photo-
nics.
Kr
¨
uger, N., Ude, A., Petersen, H. G., Nemec, B., Ellekilde,
L.-P., Savarimuthu, T. R., Rytz, J. A., Fischer, K.,
Buch, A. G., Kraft, D., et al. (2014). Technologies
for the fast set-up of automated assembly processes.
KI-K
¨
unstliche Intelligenz, 28(4):305–313.
Mavrinac, A., Chen, X., and Alarcon-Herrera, J. L. (2015).
Semiautomatic model-based view planning for active
triangulation 3-d inspection systems. IEEE/ASME
Transactions on Mechatronics, 20(2):799–811.
Medeiros, E., Doraiswamy, H., Berger, M., and Silva, C. T.
(2014). Using physically based rendering to bench-
mark structured light scanners. In Computer Graphics
Forum, volume 33, pages 71–80. Wiley Online Li-
brary.
Nilsson, J., Ericsson, M., and Danielsson, F. (2009). Virtual
machine vision in computer aided robotics. In 2009
IEEE Conference on Emerging Technologies & Fac-
tory Automation, pages 1–8. IEEE.
Papazov, C. and Burschka, D. (2010). An efficient ransac
for 3d object recognition in noisy and occluded sce-
nes. In Asian Conference on Computer Vision, pages
135–148. Springer.
Rios, L. M. and Sahinidis, N. V. (2013). Derivative-free op-
timization: a review of algorithms and comparison of
software implementations. Journal of Global Optimi-
zation, 56(3):1247–1293.
Rossmann, J., Steil, T., and Springer, M. (2012). Valida-
ting the camera and light simulation of a virtual space
robotics testbed by means of physical mockup data.
In International symposium on artificial intelligence,
robotics and automation in space (i-SAIRAS), pages
1–6.
Rozantsev, A., Lepetit, V., and Fua, P. (2015). On rendering
synthetic images for training an object detector. Com-
puter Vision and Image Understanding, 137:24–37.
Schluse, M., Schlette, C., Waspe, R., and Roßmann, J.
(2013). Advanced 3d simulation technology for ero-
botics: Techniques, trends, and chances. In 2013 Sixth
International Conference on Developments in eSys-
tems Engineering, pages 151–156.
Takei, S., Akizuki, S., and Hashimoto, M. (2014). 3d object
recognition using effective features selected by evalu-
ating performance of discrimination. In Control Au-
tomation Robotics & Vision (ICARCV), 2014 13th In-
ternational Conference on, pages 70–75. IEEE.
Ye, M., Wang, X., Yang, R., Ren, L., and Pollefeys, M.
(2011). Accurate 3d pose estimation from a single
depth image. In Computer Vision (ICCV), 2011 IEEE
International Conference on, pages 731–738. IEEE.
Simulation-based Optimization of Camera Placement in the Context of Industrial Pose Estimation
533
