
Comparing Boosted Cascades to Deep Learning Architectures for Fast
and Robust Coconut Tree Detection in Aerial Images
Steven Puttemans
∗
, Kristof Van Beeck
∗
and Toon Goedem
´
e
KU Leuven, EAVISE Research Group, Jan Pieter De Nayerlaan 5, Sint-Katelijne-Waver, Belgium
Keywords:
Object Detection, Boosted Cascades, Deep Learning.
Abstract:
Object detection using a boosted cascade of weak classifiers is a principle that has been used in a variety of
applications, ranging from pedestrian detection to fruit counting in orchards, and this with a high average
precision. In this work we prove that using both the boosted cascade approach suggest by Viola & Jones and
the adapted approach based on integral or aggregate channels by Doll
´
ar yield promising results on coconut
tree detection in aerial images. However with the rise of robust deep learning architectures for both detection
and classification, and the significant drop in hardware costs, we wonder if it is feasible to apply deep learning
to solve the task of fast and robust coconut tree detection and classification in aerial imagery. We examine
both classification- and detection-based architectures for this task. By doing so we prove that deep learning is
indeed a feasible alternative for robust coconut tree detection with a high average precision in aerial imagery,
keeping attention to known issues with the selected architectures.
1 INTRODUCTION
Getting a robust and accurate location of any object in
a given input image, combined with a correct label, is
a key part in solving many automation tasks. In most
cases the localization is only a small part of the com-
plete pipeline, thus requiring a very high accuracy, in
order to reduce the propagated error through the re-
maining pipeline as much as possible.
Large companies use human annotators in low-
cost countries to manually analyse every single
image, locating and labelling each instance of speci-
fic object classes, by manually augmenting the given
image with bounding boxes of the object instances.
In our application of coconut tree detection in aerial
images (see Figure 1), the human annotators are as-
ked to click on the coconut tree centres, after which a
circle with a predefined average diameter (which can
be defined due to the fixed height at which the images
are captured using aerial photography) is placed as
annotation on top of the coconut tree. An example of
such a labelled image can be seen in Figure 2.
This manual annotation is a cumbersome, time-
consuming and expensive process. Furthermore, to
avoid bias introduced by a single annotator, we need
to incorporate annotation redundancy, by forcing mul-
∗
Both authors equally contributed to this work.
tiple annotators to process the same image and then
averaging out on the annotation locations. Additi-
onally, manual annotation is very prone to mistakes
when performing these repetitive tasks (e.g. missing
coconut trees, selecting wrong locations, . . . ).
Many of these tasks could be automated given the
possibilities of state-of-the-art object detection algo-
rithms. These systems can, given pre-trained models
on labelled training data, robustly locate objects in a
Figure 1: Example aerial image captured through remote
sensing equipment in which we need to detect coconut trees.
230
Puttemans, S., Beeck, K. and Goedemé, T.
Comparing Boosted Cascades to Deep Learning Architectures for Fast and Robust Coconut Tree Detection in Aerial Images.
DOI: 10.5220/0006571902300241
In Proceedings of the 13th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2018) - Volume 5: VISAPP, pages
230-241
ISBN: 978-989-758-290-5
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Figure 2: Example of an aerial image containing manually annotated coconut trees.
given input image with human-like accuracy using the
power of machine learning. Compared to human an-
notators these repetitive tasks are just perfect for au-
tomated systems, which can heavily parallelize these
tasks and look for multiple object instances at once.
The challenging part lies in finding the correct al-
gorithm for training these accurate machine-learned
object detection models. This is where we position
this research on finding the optimal solution for auto-
mated and robust coconut tree detection. We are con-
vinced that several object detection algorithms based
on the principle of a boosted cascade of weak clas-
sifiers (Viola and Jones, 2001; Doll
´
ar et al., 2009;
Doll
´
ar et al., 2010) are a perfect solution for this task.
On the other hand, deep learning algorithms have in-
troduced a new wave of state-of-the-art object detec-
tors, capable of achieving top-notch accuracy results.
Combined with the fact that the required GPGPU har-
dware is becoming affordable and the fact that many
pre-trained networks already exist (e.g. caffe model
zoo (Jia et al., 2014)), it seems a valid alternative to
the boosted cascade classifier based approaches.
In this work we compare the well-known cas-
cade classifier object detection algorithms to these
new and powerful deep-learned object detection algo-
rithms. We evaluate the trained detection models both
in achieved accuracy and execution speed, keeping
in mind that achieving real-time performance is in
many cases a hard constraint for the actual applica-
tion. Furthermore we give recommendations on how
to efficiently use deep learning algorithms in the con-
text of object detection in aerial images and propose
some general rules to keep in mind.
Initial reading on the topic of deep learned object
detection shows us that training models from scratch
without large amounts of training data and expensive
hardware is infeasible, thus we examine the subject
of transfer learning, where we adapt existing deep le-
arned models, trained on larger datasets (e.g. Pas-
cal VOC (Everingham et al., 2010), Microsoft COCO
(Lin et al., 2014)) to suit our specific object detection
needs, by fine-tuning the weights of all the convoluti-
onal layers onto new object classes.
The remainder of this paper is organized as fol-
lows. Section 2 discusses the state-of-the-art in object
detection and takes a look at similar research perfor-
ming object detection in aerial imagery. This is follo-
wed by section 3 where the collected data for training
and validating our object detection solutions is discus-
sed. Section 4 and 5 discuss the different approaches
we suggest for coconut tree detection. The achieved
results are subsequently discussed in section 6, follo-
wed by conclusions in section 7.
2 RELATED WORK
The principle of a boosted cascade of weak classifiers
is introduced by (Viola and Jones, 2001), where it is
used to obtain a robust face detection algorithm based
on the very simple and weak HAAR-wavelet like fe-
atures. By letting the boosting process decide which
features are good at separating object from non-object
patches, they obtain a robust classifier with a limited
set of features. Furthermore the concept of a cascade,
which allows for the early rejection of non-object pa-
tches, increases execution speeds of this algorithm
drastically.
(Doll
´
ar et al., 2009) argues that dropping colour
information and sticking to a single invariant feature
representation might limit the possibilities of boosted
cascade classifiers. The paper suggests using multi-
ple feature representations, called integral channels
(ICF), ranging from Gabor filters, to edge filters, co-
lour filters, . . . all with the aim to improve the de-
tection quality of boosted cascades. By doing so they
significantly improve the accuracy of pedestrian de-
tection. In (Doll
´
ar et al., 2010) they introduce a set
of extensions and the concept of aggregated channel
features (ACF), pushing the achieved accuracy on pe-
destrian detection even further.
Even though algorithms based on a boosted cas-
cade of weak classifiers are already a bit older, there
is ongoing research showing that these techniques are
Comparing Boosted Cascades to Deep Learning Architectures for Fast and Robust Coconut Tree Detection in Aerial Images
231

still valid solutions for existing industrial problems
(Puttemans et al., 2016a; Puttemans et al., 2016b;
Zheng et al., 2016; Shaikh et al., 2016). These soluti-
ons offer high accuracies, by smartly using scene- and
application-specific constraints to improve the effi-
ciency of the boosted cascade algorithms, while main-
taining real-time processing speeds.
Since 2015 deep learning frameworks are taking
over the state-of-the-art in both object classification
and object detection tasks. Due to the rise of enor-
mous datasets and the drop in hardware cost, deep
learning becomes a valid alternative for any clas-
sic machine learning task. With the introduction of
pre-trained networks like AlexNet (Krizhevsky et al.,
2012), InceptionV3 (Szegedy et al., 2016), Dense-
Net (Iandola et al., 2014), ResNet (Targ et al., 2016),
. . . classification results on challenging datasets like
ImageNet (Deng et al., 2009) rise to the top.
On the detection part, interesting approaches are
suggested, based on combining the above classifica-
tion networks with a multi-scale sliding window ba-
sed approach (Szegedy et al., 2013). However, the do-
wnside of these approaches is the tremendous amount
of region proposals due to the multi-scale sliding win-
dow approach, which results in computationally ex-
pensive algorithms. To tackle this issue, region pro-
posal networks are proposed as a pre-filter for the
CNN classification pipeline (Ren et al., 2015). Even
though several parts of the region proposal network
can be shared with the subsequent classification net-
work, this approach still needs two separate architec-
tures, which need to be tuned individually.
Finally, the current state-of-the-art in object de-
tection is found in single-pass deep learned object de-
tectors. These algorithms integrate the region propo-
sal approach directly as a layer inside the classifica-
tion pipeline, thus only requiring a single pass of the
network for detecting all objects in the given image.
Examples of these state-of-the-art algorithms are the
‘Single Shot Multibox’-detector (Liu et al., 2016) and
the ‘You-Only-Look-Once’-detector (Redmon et al.,
2016). These efficient networks reduce the amount
of region proposals so drastically that obtaining real-
time performance is achievable, even rising to up to
120 FPS at VGA resolution.
3 DATASET AND FRAMEWORK
As training and validation data for our suggested ap-
proaches we make use of a 10.000 × 10.000 pixel ae-
rial image covering a partial coconut plantage provi-
ded in RGBA format. Inside the image all coconut
trees are manually annotated using their centre posi-
tion. The average size of a patch covering the whole
tree is 100 ×100 pixels, so this size is used as annota-
tion patch around the centre position. The image con-
tains 3798 coconut tree patches, while the remaining
image parts are used as background information.
In all cases we split the provided data into parts,
using one part for model learning and the other part
for model validation, to ensure the detector is not va-
lidated on actual training data. Specific data splits are
discussed at each separate technique.
To train our object detection models we use three
publicly available frameworks. The first boosted cas-
cade approach, based on the principle of (Viola and
Jones, 2001) combined with LBP features, is trai-
ned using the implementation of the OpenCV3.2 fra-
mework (Bradski and Kaehler, 2000). The second
boosted cascade approach, based on the principle of
(Doll
´
ar et al., 2010), using the aggregate channel fea-
tures approach, is trained using the authors own MAT-
LAB toolbox (Doll
´
ar, 2005). For our deep learned
models we start by using an implementation of the
InceptionV3 architecture in Tensorflow (Abadi et al.,
2015), but quickly switched to the C and CUDA based
framework Darknet (Redmon, 2013), which includes
both the classification (Darknet19,Densenet201) and
detection architectures (YOLOv2) we further test in
our paper.
4 APPROACHES WITH BOOSTED
CASCADES
In this section we discuss the different boosted cas-
cade based approaches we used for training our coco-
nut tree detectors, combined with the specific number
of training and validation samples used.
4.1 An Adaptive Boosted Cascade of
Weakly Trained Classifiers
Our first approach (Viola and Jones, 2001) is a
boosted cascade of weak classifiers using the adap-
tive boosting algorithm (Margineantu and Dietterich,
1997) for learning the weak classifiers, based on
the local binary pattern (LBP) feature representation
(Ahonen et al., 2004). This invariant feature represen-
tation ignores colour information and works directly
on a grayscale image, focusing on local differences in
pixel intensities. We choose to work on a grayscale
image since no obvious separation between coconut
trees and background (e.g. grasslands, other vegeta-
tion types, ...) seems achievable using colour infor-
mation. If however we want to detect another object
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
232
Table 1: Training data for the Viola&Jones based detection
models and the model complexity (expressed by the number
of stages and weak stump classifiers).
#pos #neg #weak #feats
Model 1 1000 2500 16 126
Model 2 1000 5000 15 123
Model 3 1000 10000 15 142
Model 4 2000 8000 16 221
class, with distinct colour based features, we would
first apply a colour-based transformation on our input
data, as suggested by (Puttemans et al., 2016b).
For training the detection model we split the
source image in four equal parts. The annotations of
the top left image part are used as positive training
samples, while the remaining image parts are used
for validation. As background training patches we
randomly sample patches at the model size, from the
image, not containing actual coconut trees. We incre-
ase the number of negative samples with each model,
to obtain a more accurate detector with less false po-
sitive detections, achieving a higher average precision
with each step, as discussed in section 6.
On top of the gathered training samples we apply
data augmentation for our final model, by randomly
flipping the training patches around their vertical or
horizontal axis. The amount of training samples used
for each model can be seen in Table 1, together with
the amount of stages of weak classifiers and the actual
number of weak classifiers, somewhat indicating the
models complexity. All weak classifiers are represen-
ted as single depth binary decision trees on top of the
selected LBP features.
4.2 An Aggregate Channel Features
based Approach
In comparison to our first approach, the algorithm of
(Doll
´
ar et al., 2010) proposes to add multiple inva-
riant feature representations to the adaptive boosting
process, as aggregate feature channels. By adding co-
lour, gradient filters, Gabor wavelets, . . . the accuracy
of the trained detectors increases compared to using a
single feature channel.
We first of all train a model using a similar amount
of positive training data (2000 samples) to the best
performing model of the previous technique. Howe-
ver we notice that the negative data might be gathered
from patches that are also validated afterwards, since
the single top left corner did not contain enough back-
ground patches to use in the Viola&Jones based ap-
proach. Therefore, two extra ACF-based models are
trained, splitting the dataset into a lower (1.741 trai-
ning samples) and an upper (1.914 training samples)
image half. We train a model using one half and vali-
dated the model using the other half of the image. In
general the ACF algorithm uses a lot more negative
training samples gathered from the same image as the
positive training, leading up to 150.000 patches.
5 APPROACHES WITH DEEP
LEARNING
After training our boosted cascade models, we switch
to the deep learned models. We first try learning a
complete architecture from scratch without initialized
weights, then apply several transfer learning appro-
aches, where existing weights of a pre-trained deep
model are fine-tuned towards application-specific
weights, resulting in a model that can detect the new
object class. Finally we investigate the difference
between classification and detection architectures in
deep learning and their applicability on coconut tree
detection in aerial imagery.
5.1 Learning a Complete New Deep
Learned Architecture
Although literature advises not to do this, we train a
completely new model on the available case-specific
data, where no initialization of the weights, based on
a previous training, is done. This model seems to con-
verge, looking at the loss-rate over the number of trai-
ning iterations, but in subsection ?? we discuss why
this converged model is misleading and usable in our
application.
5.2 Freezing (n-1) Layers and
Fine-tuning Final Layer Weights
A second approach is to freeze the weights of the pre-
trained convolutional layers, and only re-train the fi-
nal layer and its connections. This forces the deep le-
arned model to make new constellations of existing
features for a new object class. We apply this ap-
proach on the existing InceptionV3 model inside Ten-
sorFlow and try to fine-tune the final layer to be able
to classify coconut trees in aerial image patches, while
freezing all the other convolutional layers.
One major advantage of this approach is that
the amount of data needed for this kind of transfer-
learning is very small. Sample cases in the Ten-
sorFlow framework prove that only 75 samples per
class can already be enough for obtaining satisfying
results.
Comparing Boosted Cascades to Deep Learning Architectures for Fast and Robust Coconut Tree Detection in Aerial Images
233

This approach only works if the object class to be
detected is somehow related to the data contained in
the initial dataset on which the model was trained. If
the data is however drastically different, like in the
case of aerial imagery, then obtaining satisfying re-
sults using this approach is quite hard, as illustrated
in subsection 6 and other approaches should be con-
sidered.
5.3 Fine-tuning Weights of All Layers
Instead of freezing the weights of all the pre-trained
layers, we can also tolerate slight adaptations of the
pre-trained weights of the convolutional layers. This
allows to change the learned features to be more spe-
cific to our desired detection task and then learn a con-
stellation of those new fine-tuned features on top of
that. When doing so, setting a small learning rate is
mandatory, else the initial weights will be changed too
drastically too fast, prohibiting the model to converge
on an optimal solution.
Using Darknet, we apply transfer learning using
this fine-tuning approach on both the Darknet19 and
the Densenet201 architecture, trained on ImageNet,
with the goal of obtaining a deep learned classifier for
our new case of coconut tree localisation and classi-
fication, using a smaller set of case-specific manually
annotated image patches.
5.4 From Classification towards
Detection Architectures
Since we are aware that using a classification network
implies that we need to provide a multi-scale sliding-
window based approach for gathering image patches,
we try training a single pass detection based model
(YOLOv2 architecture). Literature clearly states that
these single pass networks are much faster than their
sliding-window counterparts.
Unfortunately due to the coarse grid-based region
proposals, the proposed architecture is not able to
cope with dense object-packed scenes, where object
instances are closely together and slightly overlap-
ping. This triggers final output detections that cover
multiple object instances, instead of retrieving sin-
gle object instances and furthermore doesn’t allow the
model to converge to an optimal configuration. This
is a major problem in our application of coconut tree
detection in aerial imagery and thus this approach was
abandoned.
6 RESULTS
This section discusses the various results we obtain
with the different object detection approaches focu-
sing on our case of robust and accurate coconut tree
detection.
6.1 Viola&Jones-based Object
Detection
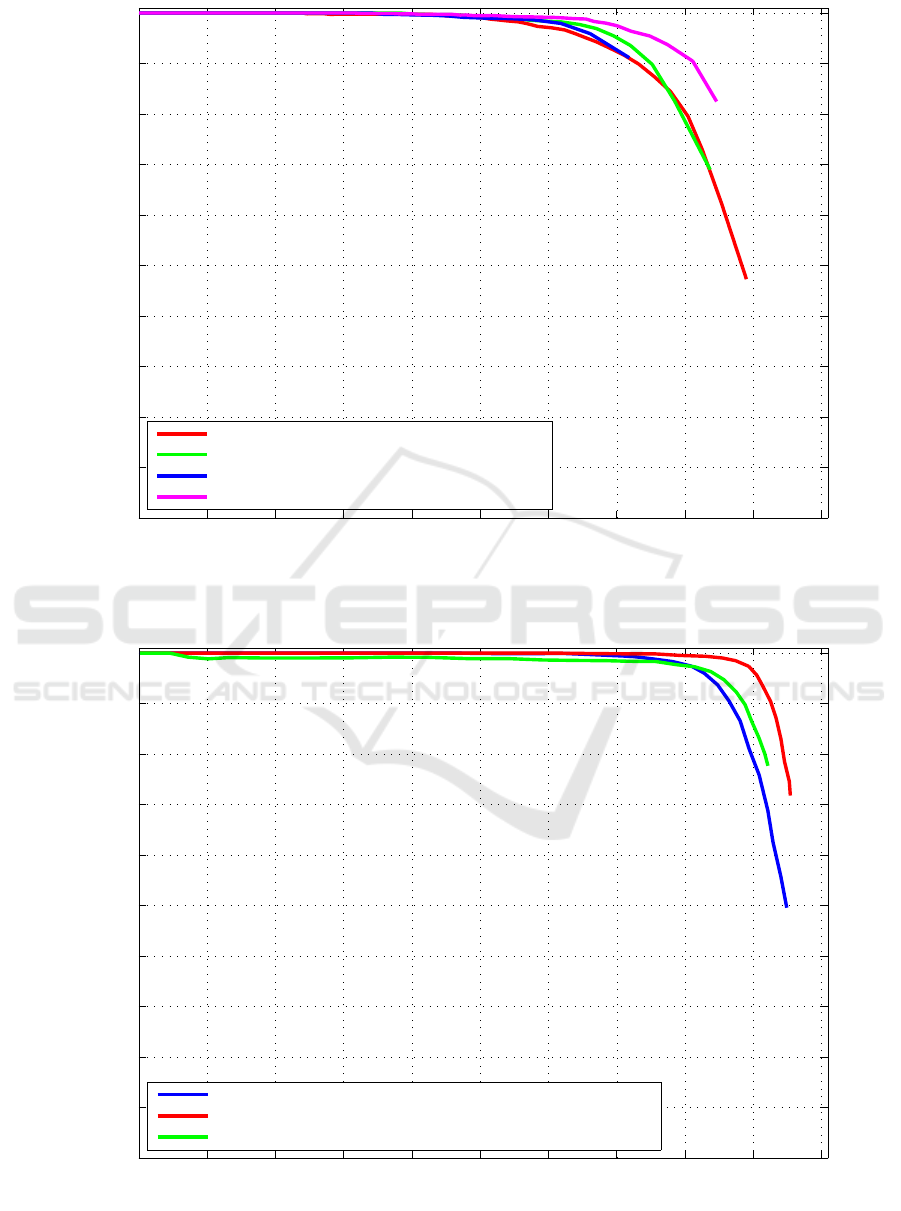
Figure 3 displays the obtained precision-recall curves
for the Viola&Jones boosted cascades of weak clas-
sifiers using local binary pattern features. For each
detector we also report the average precision (AP),
which is calculated as the area-under-the-curve for the
given precision-recall curve.
The closer the precision-recall curve lies to the
top-right corner, the better the detector. Increasing the
number of negative samples, which gives the model a
better descriptive power for its negative class, seems
to work well. This should in principle also mean a
higher average precision, but we reckon our graph
does not directly represent this. Our OpenCV ba-
sed implementation does not allow to generate more
precision-recall points for the given data, and since
we do not want to extrapolate the unknown data
points, we do not take the area under this non-existing
part into account. This gives a wrong impression on
the achieved average precision.
We conclude that given a fairly limited set of case-
specific annotated training data, and a limited training
time of only two hours, we obtain a detector that is
able to detect coconut trees with 90% precision at a
recall of 80%. Furthermore we notice that applying
data augmentation helps boosting the generalization
properties of our boosted cascade models. The final
model performs detections on a 10.000×10.000 pixel
image within ten minutes.
6.2 ACF-based Object Detection
Figure 4 shows the obtained precision-recall curves
for the ACF boosted cascades. We immediately no-
tice that this framework is able to draw power from
multiple feature channels and is thus able to obtain
higher average precisions. Our best scoring model,
trained on the bottom half of our dataset image and
validated on the top part, achieves an average preci-
sion of 94.55%.
The optimal point of the best model, and thus the
optimal setting of our detector, achieves 96% preci-
sion at a recall of 90% which is quite amazing gi-
ven the very limited training time of only 30 minu-
tes. The best performing model performs detections
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
234
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Recall
Precision
Model 1: 1000 pos 2500 neg, AP = 84.52%
Model 2: 1000 pos 5000 neg, AP = 81.74%
Model 3: 1000 pos 10000 neg, AP = 71.27%
Model 4: 2000 pos 8000 neg, AP = 83.53%
Figure 3: Precision-recall curves for the different Viola&Jones-based detection models accompanied by the number of training
samples used and the achieved average precision.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Recall
Precision
ACF trained on top left corner, AP = 92.44%
ACF trained on bottom half − test on top half, AP= 94.55%
ACF trained on top half − test on bottom half, AP = 90.34%
Figure 4: Precision-recall curves for the different ACF-based detection models with their achieved average precision.
Comparing Boosted Cascades to Deep Learning Architectures for Fast and Robust Coconut Tree Detection in Aerial Images
235
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Recall
Precision
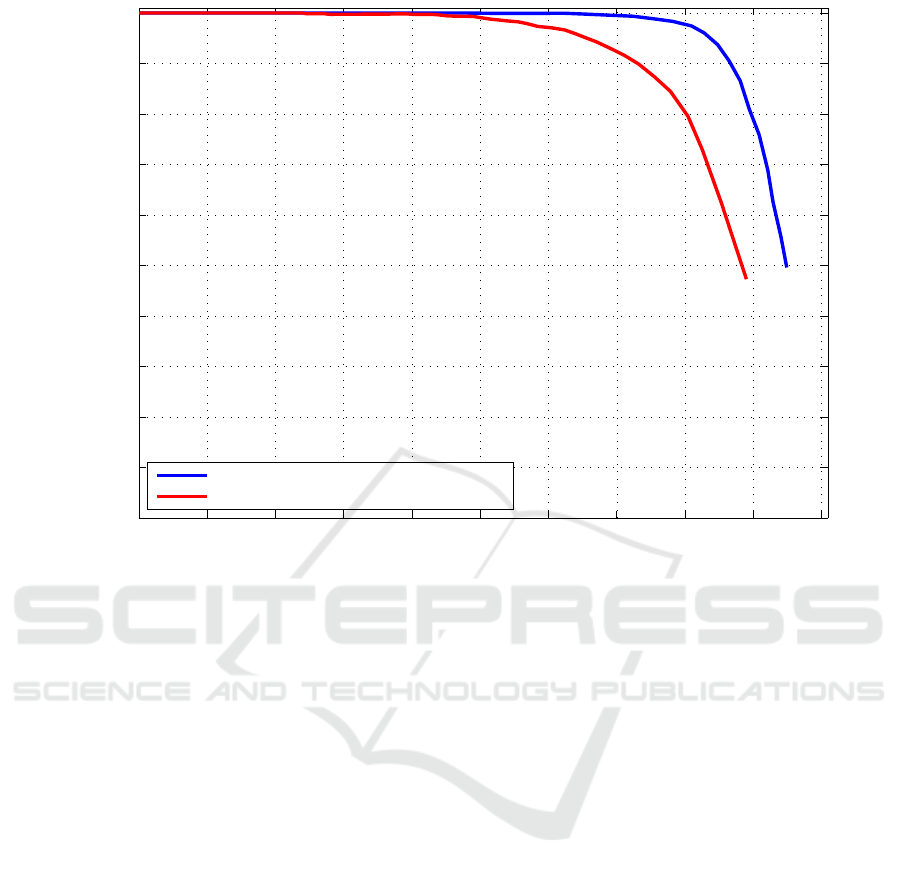
ACF, AP = 92.44%
V&J: 1000 pos 2500 neg, AP = 84.52%
Figure 5: Precision-recall comparison between VJ and ACF models on the same validation dataset.
on the 10.000 × 10.000 pixel image within five minu-
tes.
6.3 Viola&Jones versus ACF
Since both detectors of subsection 6.1 and 6.2 are va-
lidated on different amounts of data, we decide to per-
form an additional comparative study.
Figure 5 shows the result of validating the best
performing Viola&Jones and ACF detector trained on
the top left quarter and then validated on the same
remaining image as validation. This clearly shows
that ACF outperforms Viola&Jones with a 7.5% hig-
her average precision.
6.4 Deep Learned Object Classification
Our initial attempt at training a complete deep lear-
ning classification model from our limited set of trai-
ning data, did not produce usable results, although the
model seems to converge. With a top1-accuracy, a va-
lidation metric used in large scale classification ben-
chmarks, for classification of only 33% given a two-
class problem (coconut tree or background), this trai-
ned model performs worse than random guessing on
the class label, which given a large enough dataset,
should eventually converge to 50% top1-accuracy.
6.4.1 Transfer Learning with Frozen Layers
The transfer learning using TensorFlow is done with
only 75 coconut tree samples and 75 background sam-
ples, randomly sampled from the dataset, because re-
training the final convolutional layer is computatio-
nally less demanding. All other layers are frozen in
this set-up, meaning their weights cannot be changed.
The remaining image content is used for validation
and compared to the ground truth annotations. The
trained model achieves a 77% top1-accuracy.
To be able to compare this accuracy to the accu-
racy of our previously trained boosted cascades we
calculate the precision and recall at pixel level. This
results in a precision of 72% at a recall of 52%. Com-
pared to the results obtained with our boosted casca-
des we decide that his approach does not yield sa-
tisfying results, and thus this approach was abando-
ned.
6.4.2 Transfer Learning by Fine-tuning All
Layers
Following the frozen-layer-model approach we sug-
gest using pre-trained weights as initialization for mo-
del fine-tuning. However, instead of freezing the
weights of all but the last convolutional layers, we al-
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
236
0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 2.2
# Iterations
10
4
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
Training loss
Loss rate
Averaged loss rate
0 1 2 3 4 5 6 7 8 9 10 11
# Iterations
10
4
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
Training loss
Loss rate
Averaged loss rate
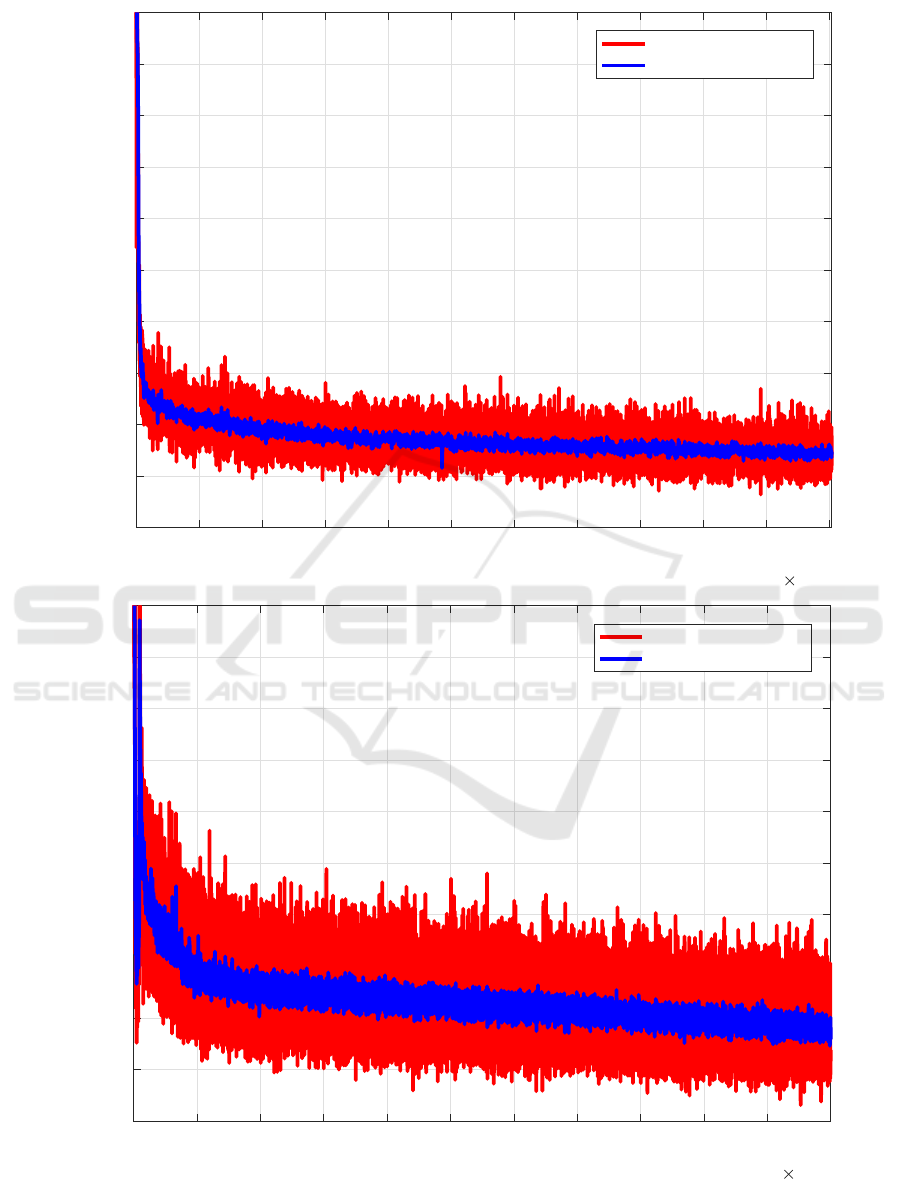
Figure 6: Loss-rate and average loss-rate curves during training for both (top) Darknet19 and (bottom) Densenet201 models.
Comparing Boosted Cascades to Deep Learning Architectures for Fast and Robust Coconut Tree Detection in Aerial Images
237
low the complete network to fine-tune its weights.
We started with the default Darknet19 network,
existing of nineteen convolutional layers and then
tried a similar approach with the more complex Den-
senet201 network, containing two-hundred-and-one
convolutional layers. The reason of testing both ar-
chitectures is the fact that the author of the Darknet
framework illustrated that using an even deeper net-
work achieves higher top1-accuracy while being slo-
wer at inference time (Redmon, 2013). We decided
to verify if this behaviour was reproducible using our
coconut tree dataset.
Figure 6 displays the loss rate versus the number
of training iterations for both bodels. As seen both
models seem to be able to converge to a stable mo-
del given enough iterations. In order to avoid over-
fitting to our training data we evaluated our deep le-
arned classification models at several iteration inter-
vals to determine the best model weights for our co-
conut tree classification task. The fast drop in loss
rate is explained by the fact that we increase the batch
size for training these models. This allows to take lar-
ger learning rate steps and at once is some sort of sa-
fety measurement against outliers. For our fine-tuned
Darknet19 model we find that using 10.000 iterations
seems optimal at a top1-accuracy of 95.2%, while for
the fine-tuned Densenet201 model using 20.000 itera-
tions gives us the best performance at a top1-accuracy
of 97.4%.
6.4.3 Execution Speeds and Memory Footprints
of Deep Learning Approaches
Since we are using the classification architectures of
Darknet instead of using detection architectures, we
are aware that we need to apply a sliding-window ba-
sed evaluation on our large input image to perform
coconut tree localisation.
We evaluate our models using a single NVIDIA
TitanX GPU. The Darknet19 model evaluates our
100 × 100 pixel input patches at 265 FPS while our
Densenet201 model evaluates patches at 52 FPS. Ta-
ble 2 gives an overview of the step size, used for the
sliding-window, in relation to the execution time of
both of our models. Due to the nature of our images,
performing multi-scale analysis is quite useless, since
images are captured on a constant flight height. Com-
bined with the fact that deep learning is quite robust
to slight size changes, we stick to 100 × 100 pixels.
Considering a 50 pixel overlap between patches
in both x and y directions and thus at a 50 pixel step
size, the complete image can be evaluated in only two
and a half minutes using our Darknet19 model. While
this does increase when a smaller step size is selected,
one can argue if this smaller step size is actually nee-
ded, since there is already a 50% overlap of patches in
both dimensions. Given the fact that there are several
more optimization possibilities (e.g. using multiple
GPUs) makes us believe that we can achieve even
faster processing speeds. If we compare this to our
boosted cascade based approaches, as shown in Ta-
ble 3, our Viola&Jones model takes 10 minutes for
a 10.000 × 10.000 pixel image, while the ACF mo-
del takes 5 minutes for the same resolution. Given
the high top-1 accuracy obtained with the deep lear-
ned models, one could definitely consider switching
to these more advanced algorithms.
Finally, taking a look at the memory footprint of
our deep learning models might be interesting for fu-
ture research. For training on our NVIDIA TitanX
instance, we made the batch sizes as large as possible
to fill the complete 12GB of dedicated memory. Ho-
wever, at run time, we process image patch per image
patch and thus the footprint is only 400MB for both
models, which means the model can also be run on a
low-end GPU, albeit slower.
6.5 Visual Results
Precision-recall curves or top1-accuracy results give
a quantitative evaluation of the trained models, but
for customers, it is always interesting to see visual re-
sults of the trained models. Therefore we developed
a visualisation tool that allows to visualise the out-
put detections of any given model with a specific co-
lour code as an overlay on top of the original input
image, as seen in Figure 7. Here we see the output
of our VJ and ACF boosted cascade algorithms and
for our deep learning classification output. For visu-
alisation purposes we need to select a fixed point on
the precision-recall curve. This threshold is set at a
precision of 90.46% and a recall of 81.12% for the
Viola&Jones model, a precision of 90.55% and a re-
call of 86.43% for the ACF model and a precision of
97.31% and a recall of 88.58% for the deep learning
approach. Green patches are true positive detections
(patches classified as coconut tree by the model and
actually containing a coconut tree), red patches are
false positives (patches classified as coconut tree by
the model but not containing a coconut tree) and pur-
ple patches are false negatives (patches classified as
Table 2: Execution speeds for a full 10.000 × 10.000 pixel
image for both deep learning models (Darknet19 and Den-
senet201), at different step sizes.
step #patches Darknet19 Densenet201
5px 3.924.361 4h 20h30m
25px 157.609 9m5s 50m20s
50px 39.601 2m30s 12m35s
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
238

Figure 7: Visual results for the (top) VJ boosted cascade model [P=90.46%,R=81.12%], the (middle) ACF boosted cascade
model [P=90.55%,R=86.43%] and the (bottom) deep learned Darknet19 model [P=97.31%,R=88.58%] showing: (green)
TP (red) FP (purple) FN.
Comparing Boosted Cascades to Deep Learning Architectures for Fast and Robust Coconut Tree Detection in Aerial Images
239
Table 3: Configurations for the visual output, including pre-
cision, recall, training and inference time (for a 10.000 ×
10.000 pixel image).
Model Precision Recall Train Infer
V&J 90.64% 81.12% 2h 10m
ACF 90.55% 86.43% 30m 5m
DN19 97.31% 88.58% 24h 2m30s
background by the model but actually containing a
coconut tree).
Comparing the different output images, we clearly
see some expected behaviour. The VJ model suffers
from a higher false positive rate than the ACF model.
This can be explained by the fact that VJ does not
take into account colour information and thus triggers
several detections on coconut tree shadows, whereas
ACF is more robust to this. Comparing the ACF mo-
del to the Darknet19 model, we see that the Darknet19
model has almost no false positive detections, hence
the high precision at a high recall rate. However the
approach still suffers from false negative detections.
We are convinced that this is partly due to the step
size of 50 pixels, used for this evaluation. Decreasing
the step size towards 25 or even 10 pixels, should furt-
her reduce the number of false negative detections.
7 CONCLUSIONS
With this research we have proven both the capabi-
lities of boosted cascade as well as deep learned de-
tection models for coconut tree localisation in aerial
images. Our best boosted cascade performs at an
average precision of 94.56% while our best deep lear-
ning model achieves a top1-accuracy of 97.4%. Alt-
hough our deep learning pipeline evaluates two times
as fast, we reckon that boosted cascades are still in the
race, especially given the lower computational com-
plexity demands, but the high classification accuracy
and speed of deep learning can simply not be ignored.
As future work we suggest taking a look at re-
gion proposal networks, to combine with our classi-
fication deep learning networks. This would reduce
the amount of image patches drastically and make the
complete pipeline even faster. On top of that we also
notice that more recent research, focusses on combi-
ning the best of both worlds, as described in (Ouy-
ang et al., 2017; Zhang et al., 2017). While using
the principle of a boosted cascade, to benefit from
the early rejection principle, the weak classifiers are
built using convolutional neural network architectu-
res, which guarantees a higher average precision in
the long end.
ACKNOWLEDGEMENTS
This work is supported by the KU Leuven, Campus
De Nayer and the Flanders Innovation & Entrepre-
neurship (AIO).
REFERENCES
Abadi, M., Agarwal, A., et al. (2015). TensorFlow: Large-
scale machine learning on heterogeneous systems.
Ahonen, T., Hadid, A., and Pietik
¨
ainen, M. (2004). Face
recognition with local binary patterns. Proceedings of
the European Conference on Computer Vision, pages
469–481.
Bradski, G. and Kaehler, A. (2000). The opencv library.
Doctor Dobbs Journal, 25(11):120–126.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-Fei,
L. (2009). Imagenet: A large-scale hierarchical image
database. In Proceedings of the IEEE Conference on
Computer Vision and Pattern Recognition, pages 248–
255.
Doll
´
ar, P. (2005). Piotr’s Computer Vision Matlab Toolbox
(PMT). https://github.com/pdollar/toolbox.
Doll
´
ar, P., Belongie, S., J, S., and Perona, P. (2010). The
fastest pedestrian detector in the west. In Proceedings
of the British Machine Vision Conference, volume 2.
Doll
´
ar, P., Tu, Z., Perona, P., and Belongie, S. (2009). In-
tegral channel features. In Proceedings of the British
Machine Vision Conference, volume 2, pages 5–12.
Everingham, M., Van Gool, L., Williams, C. K., Winn,
J., and Zisserman, A. (2010). The pascal visual ob-
ject classes (voc) challenge. International Journal of
Computer Vision, 88(2):303–338.
Iandola, F., Moskewicz, M., Karayev, S., Girshick, R., Dar-
rell, T., and Keutzer, K. (2014). Densenet: Imple-
menting efficient convnet descriptor pyramids. arXiv.
Jia, Y., Shelhamer, E., Donahue, J., Karayev, S., Long, J.,
Girshick, R., Guadarrama, S., and Darrell, T. (2014).
Caffe: Convolutional architecture for fast feature em-
bedding. In Proceedings of the International Confe-
rence on Multimedia, pages 675–678. ACM.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012).
Imagenet classification with deep convolutional neu-
ral networks. In Advances in Neural Information Pro-
cessing Systems, pages 1097–1105.
Lin, T.-Y., Maire, M., Belongie, S., Hays, J., Perona, P.,
Ramanan, D., Doll
´
ar, P., and Zitnick, C. L. (2014).
Microsoft coco: Common objects in context. In Pro-
ceedings of the European Conference on Computer Vi-
sion, pages 740–755. Springer.
Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S.,
Fu, C.-Y., and Berg, A. C. (2016). SSD: Single shot
multibox detector. In Proceedings of the European
Conference on Computer Vision, pages 21–37. Sprin-
ger.
Margineantu, D. D. and Dietterich, T. G. (1997). Pruning
adaptive boosting. In Proceedings of the International
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
240

Conference on Machine Learning, volume 97, pages
211–218.
Ouyang, W., Wang, K., Zhu, X., and Wang, X. (2017).
Chained cascade network for object detection. In
Proceedings of the IEEE International Conference on
Computer Vision.
Puttemans, S., Van Ranst, W., and Goedem
´
e, T. (2016a).
Detection of photovoltaic installations in RGB aerial
imaging: a comparative study. In Proceedings of GE-
OBIA.
Puttemans, S., Vanbrabant, Y., et al. (2016b). Automated vi-
sual fruit detection for harvest estimation and robotic
harvesting. In Proceedings of the International Con-
ference on Image Processing Theory, Tools and Appli-
cations.
Redmon, J. (2013). Darknet: Open source neural networks
in c. http://pjreddie.com/darknet/.
Redmon, J., Divvala, S., Girshick, R., and Farhadi, A.
(2016). You only look once: Unified, real-time object
detection. In Proceedings of the IEEE Conference on
Computer Vision and Pattern Recognition, pages 779–
788.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster
r-cnn: Towards real-time object detection with region
proposal networks. In Advances in Neural Informa-
tion Processing Systems, pages 91–99.
Shaikh, F., Sharma, A., Gupta, P., and Khan, D. (2016).
A driver drowsiness detection system using cascaded
AdaBoost. Imperial Journal of Interdisciplinary Re-
search, 2(5).
Szegedy, C., Toshev, A., and Erhan, D. (2013). Deep neural
networks for object detection. In Advances in Neural
Information Processing Systems, pages 2553–2561.
Szegedy, C., Vanhoucke, V., Ioffe, S., Shlens, J., and Wo-
jna, Z. (2016). Rethinking the inception architecture
for computer vision. In Proceedings of the IEEE Con-
ference on Computer Vision and Pattern Recognition,
pages 2818–2826.
Targ, S., Almeida, D., and Lyman, K. (2016). Resnet in
resnet: generalizing residual architectures. arXiv pre-
print arXiv:1603.08029.
Viola, P. and Jones, M. (2001). Rapid object detection using
a boosted cascade of simple features. In Proceedings
of the IEEE Conference on Computer Vision and Pat-
tern Recognition, volume 1, pages I–511.
Zhang, K., Zhang, Z., Wang, H., Li, Z., Qiao, Y., and Liu,
W. (2017). Detecting faces using inside cascaded con-
textual cnn. In Proceedings of the IEEE International
Conference on Computer Vision.
Zheng, Y., Merkulovb, A., and Bandarib, M. (2016). Early
breast cancer detection with digital mammograms
using haar-like features and AdaBoost algorithm. In
Scientific Sensing and Imaging.
Comparing Boosted Cascades to Deep Learning Architectures for Fast and Robust Coconut Tree Detection in Aerial Images
241
