
A Model-checking Approach to Reduce Spiking Neural Networks
Elisabetta De Maria
1
, Daniel Gaff
´
e
2
, C
´
edric Girard Riboulleau
3
and Annie Ressouche
3
1
Univ. C
ˆ
ote d’Azur, CNRS, I3S, UMR 7271, 06900 Sophia Antipolis, France
2
Univ. C
ˆ
ote d’Azur, CNRS, LEAT, UMR 7248, 06900 Sophia Antipolis, France
3
Univ. C
ˆ
ote d’Azur, INRIA SAM, 06902 Sophia-Antipolis, France
Keywords:
Neural Spiking Networks, Probabilistic Models, Temporal Logic, Model Checking, Network Reduction.
Abstract:
In this paper we formalize Boolean Probabilistic Leaky Integrate and Fire Neural Networks as Discrete-Time
Markov Chains using the language PRISM. In our models, the probability for neurons to emit spikes is driven
by the difference between their membrane potential and their firing threshold. The potential value of each
neuron is computed taking into account both the current input signals and the past potential value. Taking
advantage of this modeling, we propose a novel algorithm which aims at reducing the number of neurons and
synaptical connections of a given network. The reduction preserves the desired dynamical behavior of the
network, which is formalized by means of temporal logic formulas and verified thanks to the PRISM model
checker.
1 INTRODUCTION
Since a few decades, neurobiologists and bioinfor-
matics researchers work in concert to model neural
networks, aiming at understanding the interactions
among neurons, and the way they participate in the
different vital functions of human beings. Models be-
come bigger and bigger, and the necessity of reduc-
ing them while preserving their expected dynamics
emerges, especially in the scope of the obtention of
models which are suitable for formal verification. In
this paper we tackle the issue of neural network re-
duction.
In the literature neural network modeling is of-
ten classified into three generations (Maass, 1997;
Paugam-Moisy and Bohte, 2012). First generation
models, represented by McCulloch-Pitts one (McCul-
loch and Pitts, 1943), deal with discrete inputs and
outputs and their computational units are a set of
logic gates with a threshold activation function. Sec-
ond generation models, whose most known one is the
multi-layer perceptron (Cybenko, 1989), exploit real
valued activation functions. These networks, whose
real-valued outputs represent neuron firing rates, are
extensively used in the domain of artificial intelli-
gence and are also known as artificial neural net-
works. Third generation networks, also called Spiking
Neural Networks (Paugam-Moisy and Bohte, 2012),
stand out for the relevance of time aspects. Precise
spike firing times are taken into account. Further-
more, they consider not only current input spikes but
also past ones. In (Izhikevich, 2004), Spiking Neural
Networks are classified with respect to their biophys-
ical plausibility, that is, to the number of behaviors
(i.e., typical responses to an input pattern) they can
display. Among these models, the Hodgkin-Huxley
model (Hodgkin and Huxley, 1952) is the one able
to reproduce most behaviors. However, its simulation
process is really expensive even for a few neurons.
In this work we choose to rely on the Leaky In-
tegrate and Fire (LI&F) model (Lapicque, 1907), a
computationally efficient approximation of a single-
compartment model. Our LI&F model is augmented
with probabilities. More precisely, the probability
for neurons to emit spikes is driven by the differ-
ence between their membrane potential and their fir-
ing threshold. Probabilistic neurons are encoded as
Discrete-Time Markov Chains thanks to the model-
ing language at PRISM user’s disposition. PRISM
(Kwiatkowska et al., 2011) is a tool that allows not
only to model different probabilistic systems (with
discrete or continuous time, with or without nondeter-
minism), but also to specify their expected behavior
thanks to the use of temporal logics, a formalism for
describing the dynamical evolution of systems. Fur-
thermore, PRISM provides a model checker (Clarke
et al., 1999), which is a tool for automatically verify-
ing whether a given system satisfies or not a property
Maria, E., Gaffé, D., Riboulleau, C. and Ressouche, A.
A Model-checking Approach to Reduce Spiking Neural Networks.
DOI: 10.5220/0006572000890096
In Proceedings of the 11th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2018) - Volume 3: BIOINFORMATICS, pages 89-96
ISBN: 978-989-758-280-6
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
89

expressed in temporal logic. In case the property does
not hold in the system, the user can have access to a
counter-example, that is, an execution trace falsify-
ing the property at issue, which often helps in finding
modifications in the model for the property to be sat-
isfied. In order to apply model-checking techniques
efficiently, the model to handle should be as small as
possible.
Taking advantage of this modeling and verifi-
cation framework, we introduce a novel algorithm
which aims at reducing the number of neurons and
synaptical connections of a given neural network.
The proposed reduction preserves the desired dynam-
ical behavior of the network, which is formalized by
means of temporal logic formulas and verified thanks
to the PRISM model checker. More precisely, a neu-
ron is removed if its suppression has a low impact on
the probability for a given temporal logic formula to
hold. Observe that, other than their utility in lighten-
ing models, algorithms for neural network reduction
have a forthright application in the medical domain.
In fact, they can help in detecting weakly active (or
inactive) zones of the human brain.
The issue of reducing biological networks is not
new in systems biology. Emblematic examples can
be found in (Naldi et al., 2011), where the authors
propose a methodology to reduce regulatory networks
preserving some dynamical properties of the original
models, such as stable states, in (Gay et al., 2010),
where the authors study model reductions as graph
matching problems, or in (Paulev
´
e, 2016), whose au-
thor considers finite-state machines and proposes a
technique to remove some transitions while preserv-
ing all the (minimal) traces satisfying a given reach-
ability property. As far as neural networks are con-
cerned, to the best of our knowledge the core of the
existing reduction approaches only deals with second
generation networks. Several methods to train a net-
work that is larger than necessary and then remove
the superfluous parts, known as pruning techniques,
are explained in (Reed, 1993) . Finally, in (Menke
and Martinez, 2009) the authors introduce an ora-
cle learning methodology, which consists in using a
larger model as an oracle to train a smaller model in
order to obtain a smaller acceptable model. With ora-
cle learning, the smaller model is created initially and
trained using the larger model, whereas with pruning,
connections are removed from the larger model until
the desired size is reached.
The paper is organized as follows. In Section 2
we introduce a probabilistic version of the Leaky In-
tegrate and Fire Model. Section 3 is devoted to the
PRISM modeling language and the temporal logic
PCTL (Probabilistic Computation Tree Logic). In
Section 4 we describe our modeling of neural net-
works as Discrete-Time Markov Chains in PRISM.
2 PROBABILISTIC LEAKY
INTEGRATE AND FIRE
MODEL
We model neuron networks as Boolean Spiking Net-
works, where the electrical properties of neurons
are represented through the Leaky Integrate and Fire
(LI&F) model. In this modeling framework, neural
networks are seen as directed graphs whose nodes
stand for neurons and whose edges stand for synap-
tical connections. Edges are decorated with weights:
positive (resp. negative) weights represent activations
(resp. inhibitions). The dynamics of each neuron is
characterized through its (membrane) potential value,
which represents the difference of electrical potential
across the cell membrane. At each time unit, the po-
tential value is computed taking into account present
input spikes and the previous decayed potential value.
In order to weaken the past potential value, it is mul-
tiplied by a leak factor. In our probabilistic LI&F
model, the probability for each neuron to emit an ac-
tion potential, or spike, is governed by the difference
between the potential value and a given firing thresh-
old. For positive (resp. negative) values of this dif-
ference, the more its absolute value is big, the more
(resp. the less) is the probability to emit a spike. Af-
ter each spike emission, the neuron potential is reset
to zero. In the literature, other ways exist to incorpo-
rate probabilities in LI&F models, such as the Noisy
Integrate and Fire models (Di Maio et al., 2004; Four-
caud and Brunel, 2002), where a noise is added to the
computation of the potential value.
More formally, we give the following definitions
for probabilistic LI&F networks.
Definition 1 (Boolean Probabilistic Spiking Integrate
and Fire Neural Network). A Boolean Probabilis-
tic Integrate and Fire Neural Network is a tuple
(V, E, w), where:
• V are Boolean probabilistic spiking integrate and
fire neurons,
• E ⊆ V ×V are synapses,
• w : E → Q ∩[−1, 1] is the synapse weight function
associating to each synapse (u, v) a weight w
uv
.
We distinguish three disjoint sets of neurons: V
i
(input
neurons), V
int
(intermediary neurons), and V
o
(output
neurons), with V = V
i
∪V
int
∪V
o
.
Definition 2 (Boolean Probabilistic Spiking Integrate
and Fire Neuron). A Boolean Probabilistic Spiking
BIOINFORMATICS 2018 - 9th International Conference on Bioinformatics Models, Methods and Algorithms
90
Integrate and Fire Neuron v is a tuple (τ, r, p, y),
where:
• τ ∈ N is the firing threshold,
• r ∈ Q ∩ [0, 1] is the leak factor,
• p : N → Q
+
0
is the [membrane] potential function
defined as
p(t) =
∑
m
i=1
w
i
· x
i
(t), i f p(t − 1) > τ
∑
m
i=1
w
i
· x
i
(t) + r · p(t − 1), otherwise
where p(0) = 0, m is the number of inputs of the
neuron v, w
i
is the weight of the synapse connect-
ing the i
th
input neuron of v to the neuron v, and
x
i
(t) ∈ {0, 1} is the signal received at the time t by
the neuron v through its i
th
input synapse (observe
that, after the potential overcomes its threshold, it
is reset to 0),
• y : N → {0, 1} is the output function of the neuron.
Supposing to discretize p(t) − τ in k + 1 positive in-
tervals and k + 1 negative intervals, the probability
for the neuron v to emit a spike can be described as
follows:
P(y(t) = 1) =
1 i f p(t)− τ ≥ l
k
p
2k
i f l
k−1
≤ p(t) − τ < l
k
.
.
.
p
k+1
i f 0 ≤ p(t) − τ < l
1
p
k
i f − l
1
≤ p(t) − τ < 0
.
.
.
p
1
i f − l
k
≤ p(t) − τ < −l
k−1
0 i f p(t)− τ < −l
k
(1)
with {l
1
, .. . , l
k
} ⊆ N
+
such that l
i
< l
i+1
∀i ∈
{1, .. . , k − 1} and {p
1
, .. . , p
2k
} ⊆ ]0, 1] ∩Q such that
p
i
< p
i+1
∀i ∈ {1, . . . , 2k − 1}.
In our implementation, the probability values are cho-
sen in order to conform to a sigmoidal function.
3 THE PROBABILISTIC MODEL
CHECKER PRISM
The probabilistic model checker PRISM
(Kwiatkowska et al., 2011) is a tool for formal
modeling and analysis of systems with a random or
probabilistic behavior. It supports several types of
probabilistic models: discrete ones, namely discrete-
time Markov chains, Markov decision processes, and
probabilistic automata, and continuous ones, namely
continuous-time Markov chains, probabilistic timed
automata, and priced probabilistic timed automata.
In this work we rely on discrete-time Markov chains,
which are transition systems augmented with prob-
abilities. Their set of states represent the possible
configurations of the system being modeled, and
transitions between states model the evolution of
the system, which occurs in discrete-time steps.
Probabilities of making transitions between states are
given by discrete probability distributions. Markov
chains are memoryless, that is, their current state
contains all the information needed to compute
future states (Markov property). More precisely, the
following definition can be given:
Definition 3 (Discrete-Time Markov Chain). A
Discrete-Time Markov Chain (DTMC) over a set of
atomic propositions AP is a tuple (S, S
init
, P, L) where:
• S is a set of states (state space)
• S
init
⊆ S is the set of initial states
• P : S × S → [0, 1] is the transition probability ma-
trix, where
∑
s
0
∈S
P(s, s
0
) = 1 for all s ∈ S
• L : S → 2
AP
is a function labeling states with
atomic propositions over AP.
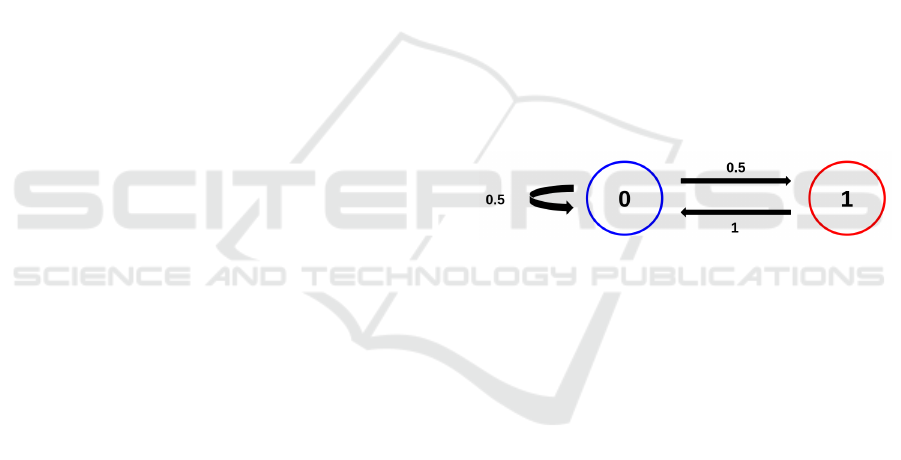
An example of DTMC representing a simplified
neuron is graphically depicted in Figure 1, where the
neuron can be either active or inactive.
Figure 1: Example of a two-state DTMC representing a
simplified neuron. When the neuron is inactive (state 0), it
remains inactive with a probability of 0.5, and it becomes
active, and thus emits a spike (state 1), with a probability of
0.5. When it is active, is becomes inactive with a probability
of 1.
3.1 The PRISM Modeling Language
PRISM provides a state-based modeling language in-
spired from the reactive modules formalism of (Alur
and Henzinger, 1999). A model is composed by a
set of modules which can interact with each other. At
each moment, the state of each module is given by the
values of its local variables, and the global state of the
whole model is determined by the local state of all its
modules. The dynamics of each module is described
by a set of commands of the form:
[]guard → prob
1
: update
1
+ ... + prob
n
: update
n
;
where guard is a predicate over all the variables of the
model, indicating the condition to be verified in order
to execute the command, and each update indicates
a possible transitions of the model, to be achieved
by giving new values to the variables of the module.
Each update is assigned to a probability and, for each
A Model-checking Approach to Reduce Spiking Neural Networks
91

command, the sum of probabilities must be 1. The
PRISM code for the DTMC of Figure 1 is given in
Figure 2. In such a simple module, the square brack-
ets at the beginning of each command are empty but
it is possible to add labels representing actions. These
actions can be used to force two or more modules
to make transitions simultaneously. In this work, we
take advantage of this feature to synchronize neurons
in networks. Finally, PRISM models can be extended
Figure 2: PRISM code for the DTMC of Figure 1. The
only variable y, representing the state of the neuron, ranges
over [0..1]. Its initial value is 0. When the guard is y = 0,
the updates (y
0
= 0) and (y
0
= 1) and their associated proba-
bilities state that the value of y remains at 0 with probability
0.5 and passes to 1 with probability 0.5. When y = 1, the
variable changes its value to 0 with a probability of 1.
with rewards (Kwiatkowska et al., 2007), which al-
low to associate real values to states or transitions of
models. As an example, in Figure 3 we show how to
augment the simplified neuron code of Figure 2 in or-
der to add a reward each time the neuron is active, and
thus to count the number of spike emissions.
Figure 3: Addition of a reward to the PRISM code for a
simplified neuron. Each time y = 1 (spike emission), the
reward increases of one time unit.
3.2 Probabilistic Temporal Logic
PRISM allows to specify the dynamics of DTMCs
thanks to the temporal logic PCTL (Probabilistic
Computation Tree Logic) introduced in (Hansson and
Jonsson, 1994), which extends the logic CTL (Com-
putation Tree Logic) (Clarke et al., 1986) with time
and probabilities. The following state quantifiers are
available in PCTL: X (next time), which specifies that
a property holds at the next state of a given path,
F (sometimes in the future), which requires a prop-
erty to hold at some state on the path, G (always in
the future), which imposes that a property is true at
every state on the path, and U (until), which holds
if there is a state on the path where the second of
its argument properties holds and, at every preced-
ing state on the path, the first of its two argument
properties holds. Note that the classical path quan-
tifiers A (forall) and E (exist) of CTL are replaced
by probabilities. Thus, instead of saying that some
property holds for all paths or for some paths, we
can express that a property holds for a certain frac-
tion of the paths (Hansson and Jonsson, 1994). The
most important operator in PCTL is P, which al-
lows to reason about the probability of event occur-
rences. The property P bound [prop] is true in a
state s of a model if the probability that the prop-
erty prop is satisfied by the paths from state s sat-
isfies the bound bound. As an example, the PCTL
property P= 0.5 [X (y = 1)] holds in a state if the
probability that y = 1 is true in the next state equals
0.5. All the state quantifiers given above, with the
exception of X, have bounded variants, where a time
bound is imposed on the property. For example, the
property P> 0.9 [F<=10 y=1] is true in a state if the
probability of y being equal to 1 within 10 time units
is greater than 0.9. Furthermore, in order to com-
pute the actual probability that some behavior of a
model is displayed, the P operator can take the form
P=? [prop], which evaluates to a numerical rather
than to a Boolean value. As an example, the property
P =? [G (y = 0)] expresses the probability that y
is always equal to 0.
PRISM also allows to formalize properties which
relate to the expected values of rewards. This is pos-
sible thanks to the R operator, which can be used in
the following two forms: R bound [rewardprop],
which is true in a state of a model if the expected re-
ward associated with reward prop when starting from
that state meets the bound, and R=? [rewardprop],
which returns the actual expected reward value. Some
specific operators are introduced in PRISM in order
to deal with rewards. In the rest of the paper, we
mainly exploit C (cumulative-reward). The property
C<=t corresponds to the reward cumulated along a
path until t time units have elapsed. As an exam-
ple, consider the reward y of Figure 3. The property
R{"y"} =? [C <= 100] returns the expected value
of the reward y within 100 time units. PRISM pro-
vides model-checking algorithms (Clarke et al., 1999)
to automatically validate DTMCs over PCTL proper-
ties and reward-based ones. The available algorithms
are able to compute the actual probability that some
behavior of a model is displayed, when required.
BIOINFORMATICS 2018 - 9th International Conference on Bioinformatics Models, Methods and Algorithms
92

4 NEURONAL NETWORKS IN
PRISM
This section is devoted to the modeling of Boolean
Probabilistic LI&F neural networks as DTMCs using
the PRISM language. As a first step, we introduce
an input generator module in order to generate input
sequences on the alphabet {0, 1} for input neurons.
Such a module deals with one only Boolean variable
whose value is 1 (resp. 0) in case of spike (resp. no
spike) emission. We provide several instantiations of
such a module to be able to generate different kinds
of input sequences: persistent ones (containing only
1), oscillatory ones, and random ones.
We then define a neuron module to encode LI&F
neurons. The state of each neuron is characterized by
two variables: a first Boolean variable denoting the
spike emission, and a second integer
1
variable repre-
senting the potential value, computed as a function of
the current inputs and the previous potential value, as
shown in Definition 2. The difference between the
potential value and the firing threshold is discretized
into k + 1 positive intervals and k + 1 negative inter-
vals and a PRISM command is associated to each one
of this intervals: if the neuron is inactive and the dif-
ference between the potential and the threshold meets
the guard, the neuron is activated with a certain prob-
ability p (a bigger difference gives a higher probabil-
ity). The neuron remains inactive with a probability
equal to 1 − p. The aforecited commands share the
same label (to). To complete the modeling of a single
neuron, we add a command acting when the neuron is
active: with a probability of 1 it resets the potential
value and makes the neuron inactive. Such a com-
mand is connoted by a new different label (reset),
that turns out to be useful to synchronize the output of
neurons with the input of the following ones. Thanks
to a module renaming feature at PRISM user’s dispo-
sition, neurons with different parameters can be easily
obtained starting from the standard neuron module.
We then model the synaptical connections be-
tween the neurons of the network. In order to avoid a
neuron to be reset before its successor takes its acti-
vation into account, we introduce a transfer module
consisting of one only variable ranging over {0,1}
and being initialized at 0. Thanks to synchronization
labels, at each reset of the first neuron this variable
passes to 1 first, and then goes back to 0, synchroniz-
ing with the second neuron (label to), which takes the
received signal into account to compute its potential
value.
The PRISM code for the neuron and the transfer
1
We exploit integer rather than rational numbers in order to
have efficient model-checking performances
modules can be found in (Girard Riboulleau, 2017),
where the PRISM model has been validated against
several PCTL properties.
5 MODEL-CHECKING BASED
REDUCTION ALGORITHM
In this section we introduce a novel algorithm for the
reduction of Boolean Probabilistic LI&F networks.
The algorithm supposes the network to be imple-
mented as a DTMC in PRISM (Girard Riboulleau,
2017) and makes several calls to the PRISM model
checker, in order to retrieve the probability relative to
the satisfaction of some PCTL formulas and the value
of some rewards.
As a first step, the algorithm aims at identify-
ing, and thus removing, the wall neurons, that is, the
neurons that are not able emit, even if they receive
a persistent sequence of spikes as input. More for-
mally, a neuron can be characterized as a wall one if
its probability to be always quiescent (inactive) is 1:
P=1 [G (y=0)]. When the algorithm detects a wall
neuron, it removes not only the neuron but also its
descendants whose only incoming synaptical connec-
tion comes, directly or indirectly
2
, from this neuron,
and its ancestors whose only outgoing edge enters, di-
rectly or indirectly, the neuron.
As a second step, the algorithm aims at testing
whether the suppression of the remaining neurons
preserves or not the dynamics of the network. The
removal of a neuron (and its associated ancestors and
descendants) is authorized if the following two quan-
tities are kept (modulo a certain error):
Quantitative Criterion. The reward computing the
number of emitted spikes (within 100 time units)
of each output neuron.
Qualitative Criterion. The probability for a given
PCTL property (concerning the output neurons)
to hold.
The number of spikes emitted by a neuron
within 100 time units can be computed thanks
to the following reward-based PRISM property:
R{"y"} =? [C <= 100]. An example of key
property concerning the qualitative behavior of a
neuron is the following one, expressing an oscil-
lating trend: P=? [G((y=1 => (y=1 U y=0))&
(y=0 => (y=0 U y=1)))]. Such a formula requires
every spike emission to be followed by a quiescent
state (not necessarily immediately) and viceversa.
Formulas comparing the behaviors of several neurons
2
By one only edge or a path
A Model-checking Approach to Reduce Spiking Neural Networks
93

can be written as well. Observe that the respect of
both quantitative and qualitative criteria is needed for
a neuron removal. In fact, the output neurons of two
different networks could exhibit the same spike rate
but display a completely different behavior. On the
other hand, their could exhibit the same qualitative
behavior (e.g., an oscillatory trend), but have quite
different spike rates. The pseudo-code for the pro-
posed reduction algorithm is given in Algorithm 1. It
takes as input a Boolean Probabilistic LI&F network
G = (V, E, w) as given in Definition 1, a PCTL prop-
erty Prop concerning the dynamical behavior of the
output neurons of the network, and an allowed error
value ε. Only intermediary neurons are affected by
the reduction process, that is, input and output neu-
rons cannot be removed. Intermediary neurons are
first visited following a depth first search (DFS) in
order to remove wall neurones (and their associated
ancestors and descendants). We opt for a depth first
visit instead of a breath first visit to avoid expensive
backtracking. Furthermore, DFS is better suited to
our approach because it allows to quickly take into
account all the descendants of a node and cut them
if necessary. The procedure in charge to remove a
neuron (and its associated ancestors and descendants)
is REMOVAL (see Algorithm 2). Another depth first
traversal of the (remaining) intermediary neurons is
then performed to identify (and thus remove thanks
to the REMOVAL procedure) neurons whose removal
has a low influence (according to ε) on the probabil-
ity for Prop to be satisfied and on the rate spike. It
is possible to see that, for each traversal, each edge
is visited at most twice, once forward and once back-
ward. An example of application of the algorithm to a
neural network composed of eight neurons and nine
edges is graphically depicted in Figure 4. The re-
duction process leads to a reduced network consisting
of four neurons and three edges. In Table 1 we con-
sider several neural networks composed of four neu-
rons (with only one input and output neuron) and their
corresponding reduced network, consisting of three
neurons. For each network, we give the spike rate of
the output neuron, and the number of states and transi-
tions of the corresponding PRISM transition system.
For an average error lower than 0.65 in the spike rate,
we have an average reduction of the state number of
a factor 19.6 and an average reduction of the transi-
tion number of a factor 19.64 when passing from the
complete to the reduced network.
Algorithm 1: LI&F REDUCTION (G, Prop, ε).
1: $$We distinguish input, intermediary, and output
neurons
2: Let V = V
i
S
V
int
S
V
o
3: for all v
i
∈ V
int
in a DFS visit do
4: Set to 1 all the input signals of v
i
5: $$ Call to the PRISM model checker
6: if P = 1[G(y
i
= 0)] $$ y
i
is the output of v
i
then
7: REMOVAL(v
i
) $$ V
int
and E are modified
by REMOVAL
8: Set to 1 all the input signals of the neurons of V
i
9: for all v
o
∈ V
o
do
10: Compute r
o
= spike rate o f v
o
thanks to
PRISM rewards
11: Compute p = Prob(Prop is T RU E) thanks to
PRISM
12: for all v
i
∈ V
int
do
13: Let V
0
= V \{v
i
}, E
0
= E \ {(v
i
, v
j
)∪ (v
k
, v
i
)}
s.t. v
j
, v
k
∈ V
14: Let G
0
= (V
0
, E
0
, w)
15: for all v
o
∈ V
o
do
16: Compute r
0
o
= spike rate o f v
o
in G
0
thanks to PRISM rewards
17: Compute p
0
= Prob(Prop is T RUE) in G
0
thanks to PRISM
18: if |r
0
o
− r
o
| ≤ ε for all v
o
∈ V
o
and |p
0
− p| ≤ ε
then
19: REMOVAL(v
i
)
Table 1: Comparative table of some complete and re-
duced networks. We consider 13 different (with differ-
ent parameters) networks composed of four neurons and the
corresponding networks obtained thanks to the reduction al-
gorithm. All the reduced networks consist of three neurons.
We give spike rates of output neurons, and the number of
states and transitions of the corresponding PRISM transi-
tion systems. The last row refers to averages.
Complete network (4 neurons) Reduced network (3 neurons)
spikes states transitions spikes states transitions
6.75 252 820 565 068 6.72 16 816 37 510
7.93 148 480 319 549 7.92 10 255 22 029
6.11 291 002 653 121 6.07 19 903 44 559
9.55 280 719 608 641 9.54 12 062 26 109
6.75 225 169 500 245 6.72 15 005 33 254
5.86 265 683 591 546 5.48 19 571 43 542
8.75 149 641 325 890 8.65 9 418 20 466
7.39 193 897 425 447 7.37 12 951 28 341
8.16 961 701 2 142 739 8.16 21 829 48 547
5.84 60 422 129 583 5.84 7 239 15 516
9.50 196 433 427 391 9.50 12 768 27 762
10.26 333 952 715 179 10.26 10 841 23 101
8.13 192 456 424 269 8.13 12 634 27 809
7.77 273 260 602 205 7.72 13 946 30 657
BIOINFORMATICS 2018 - 9th International Conference on Bioinformatics Models, Methods and Algorithms
94

Algorithm 2: REMOVAL(v
i
).
1: $$ It suppresses a neuron v
i
and all the neurons
only having v
i
as ancestor or descendant
2: V
int
= V
int
\ {v
i
}
3: E = E \ {(v
i
, v
j
) ∪ (v
k
, v
i
)} s.t. v
j
, v
k
∈ V
4: G
work
= (V
int
, E)
5: for all v
j
descendant of v
i
in a DFS visit of G do
6: $$ If v
j
has no incoming edges in G
work
, we
remove v
j
and its exiting edges
7: if {(v
h
, v
j
)} = ∅ then
8: V
int
= V
int
\ {v
j
}
9: E = E \{(v
j
, v
h
)} s.t. v
h
∈ V
10: for all v
k
ancestors of v
i
in a DFS visit of G do
11: $$ If v
k
has no outgoing edges in G
work
, we
remove v
k
and its incoming edges
12: if {(v
k
, v
l
)} = ∅ then
13: V
int
= V
int
\ {v
k
}
14: E = E \{(v
l
, v
k
)} s.t. v
l
∈ V
15: G = G
work
6 CONCLUSIONS
In this paper we have formalized Boolean Proba-
bilistic Leaky Integrate and Fire Neural Networks
as Discrete-Time Markov Chains using the language
PRISM. Taking advantage of this modeling, we have
proposed a novel algorithm which aims at reducing
the number of neurons and synaptical connections of
a given network. The reduction preserves the desired
dynamical behavior of the output neurons of the net-
work, which is formalized by means of temporal logic
formulas and verified thanks to the PRISM model
checker.
This work is the starting point for several future
research directions. From a modeling point of view,
the use of labels entails a break time during which the
different modules communicate but all the other func-
tions are stopped. Namely, in our model the reset
label causes a break time after each spike emission.
A big number of spikes leads thus to a big number of
break times and we intend to minimize these times.
We also plan to model the refractory time of neurons,
a lapse of time following the spike emission during
which the neuron is not able to emit (even if it con-
tinues to receive signals). At this aim, we may need
to take advantage of Probabilistic Timed Automata,
which are at PRISM user’s disposition.
Concerning the reduction algorithm, for the mo-
ment we show our approach to be efficient for small
networks, i.e., the removal of only one neuron drasti-
cally reduces the size of the transition system. As for
future work, we intend to scale our methodology.
(a) Initial network
(b) First reduction
(c) Second reduction
(d) Reduced network
Figure 4: Application of the reduction algorithm on a
neuronal network of eight neurons. The only input neu-
ron is v
i
and the only output neuron is v
o
. The other neurons
are numbered according to a DFS order. The neuron 1 is
identified as a wall one. The first reduction step (4(b)) con-
sists in removing the neuron 1 and, consequently, the neu-
ron 2, because its only ingoing edge comes from the neuron
1. No other wall neuron is detected. The second reduction
(4(c)) is due to the fact that the removal of neuron 4 influ-
ences neither the satisfaction of Prop nor the spike emission
rate of v
o
. The neuron 3 is also removed because its only
output edge enters the neuron 4. The final reduced network
is given in 4(d).
The actual version of the reduction algorithm finds
a reduction which conforms to the expected behavior
of the network. We find one solution among several
possible ones, but this solution is not necessary the
optimal one, that is, it does not necessarily minimize
the difference of behavior between the complete and
the reduced network. In order to help the research
of optimal solutions, we intend to perform a sensitiv-
ity analysis of our networks, aiming at identifying the
parameters playing a most important role in the veri-
fication of some given temporal properties.
A Model-checking Approach to Reduce Spiking Neural Networks
95

ACKNOWLEDGEMENTS
We thank Alexandre Muzy for fruitful discussions on
neuron behaviors.
REFERENCES
Alur, R. and Henzinger, T. (1999). Reactive modules. For-
mal Methods in System Design, 15(1):7–48.
Clarke, E. M., Emerson, E. A., and Sistla, A. P. (1986).
Automatic verification of finite-state concurrent sys-
tems using temporal logic specifications. ACM Trans-
actions on Programming Languages and Systems
(TOPLAS), 8(2):244–263.
Clarke, E. M., Grumberg, O., and Peled, D. (1999). Model
checking. MIT press.
Cybenko, G. (1989). Approximation by superpositions of a
sigmoidal function. Mathematics of Control, Signals
and Systems, 2(4):303–314.
Di Maio, V., Lansky, P., and Rodriguez, R. (2004). Dif-
ferent types of noise in leaky integrate-and-fire model
of neuronal dynamics with discrete periodical input.
General physiology and biophysics, 23:21–38.
Fourcaud, N. and Brunel, N. (2002). Dynamics of the firing
probability of noisy integrate-and-fire neurons. Neural
computation, 14(9):2057–2110.
Gay, S., Soliman, S., and Fages, F. (2010). A graphical
method for reducing and relating models in systems
biology. Bioinformatics, 26:i575–i581.
Girard Riboulleau, C. (2017). Mod
`
eles probabilistes et
v
´
erification de r
´
eseaux de neurones. Master’s thesis,
Universit
´
e Nice-Sophia-Antipolis.
Hansson, H. and Jonsson, B. (1994). A logic for reasoning
about time and reliability. Formal aspects of comput-
ing, 6(5):512–535.
Hodgkin, A. L. and Huxley, A. F. (1952). A quantitative
description of membrane current and its application to
conduction and excitation in nerve. The Journal of
Physiology, 117(4):500–544.
Izhikevich, E. M. (2004). Which model to use for cortical
spiking neurons? IEEE Transaction On Neural Net-
works, 15(5):1063–1070.
Kwiatkowska, M., Norman, G., and Parker, D. (2007).
Stochastic model checking. In International School
on Formal Methods for the Design of Computer, Com-
munication and Software Systems, pages 220–270.
Springer.
Kwiatkowska, M., Norman, G., and Parker, D. (2011).
PRISM 4.0: Verification of probabilistic real-time sys-
tems. In Gopalakrishnan, G. and Qadeer, S., edi-
tors, Proc. 23rd International Conference on Com-
puter Aided Verification (CAV’11), volume 6806 of
LNCS, pages 585–591. Springer.
Lapicque, L. (1907). Recherches quantitatives sur
l’excitation electrique des nerfs traitee comme une po-
larization. J Physiol Pathol Gen, 9:620–635.
Maass, W. (1997). Networks of spiking neurons: The third
generation of neural network models. Neural Net-
works, 10(9):1659–1671.
McCulloch, W. S. and Pitts, W. (1943). A logical calculus
of the ideas immanent in nervous activity. The bulletin
of mathematical biophysics, 5(4):115–133.
Menke, J. E. and Martinez, T. R. (2009). Artificial neural
network reduction through oracle learning. Intelligent
Data Analysis, 13(1):135–149.
Naldi, A., Remy, E., Thieffry, D., and Chaouiya, C. (2011).
Dynamically consistent reduction of logical regula-
tory graphs. Theorical Computer Science, 412:2207–
2218.
Paugam-Moisy, H. and Bohte, S. M. (2012). Computing
with spiking neuron networks. In Handbook of Natu-
ral Computing, pages 335–376.
Paulev
´
e, L. (2016). Goal-oriented reduction of automata
networks. In Computational Methods in Systems Bi-
ology - 14th International Conference, CMSB 2016,
Cambridge, UK, September 21-23, 2016, Proceed-
ings, pages 252–272.
Reed, R. (1993). Pruning algorithms-a survey. Trans. Neur.
Netw., 4(5):740–747.
BIOINFORMATICS 2018 - 9th International Conference on Bioinformatics Models, Methods and Algorithms
96
