
Multi-Forest Classification and Layered Exhaustive Search using a Fully
Hierarchical Hand Posture/Gesture Database
Amin Dadgar and Guido Brunnett
Computer Science, Chemnitz University of Technology, Straße der Nationen 62, 09111, Chemnitz, Germany
Keywords:
Fully-Hierarchical Hand Posture Database, Multi-Forest Classification, Layered-Exhaustive Search.
Abstract:
In this paper, we propose a systematic approach to building an entirely hierarchical hand posture database.
The hierarchy provides the possibility of considering a large number of hand poses while requires a low
time-space complexity for construction. Furthermore, two algorithms (random decision forest and exhaustive
search) are chosen and tested on this database. We show that by utilizing such a database one will achieve
better performances on classifiers’ training and search strategies (two main categories of the algorithms in the
field of machine learning) compared with conventional (all-in-one-layer) databases.
1 INTRODUCTION
To achieve an accurate, robust and real-time hand ge-
sture recognition system, within the “analysis by synt-
hesis” approach (Yuille and Kersten, 2006), there are
many technical challenges which need to be tackled.
One of these challenges is the high computational
complexity of training and searching of the pos-
ture/gesture space. That is due to a large number of
degree-of-freedom (DoF) that the hand, as an articu-
lated object, owns. Therefore, the system is obliged
to recognize a small set of gestures (Schlenzig et al.,
1994). Moreover, it requires a rich database to include
different viewpoints of the hand (Sharp et al., 2015).
Thus, to address the issue effectively, the choice of the
database of the postures and their relations (gestures)
seems to be an important decision.
Due to the versatile usage of the hand in applicati-
ons and its vast possibilities of different motions (Hei-
monen et al., 2013; Jacob et al., 2011; Starner and
Pentland, 1995) it should be challenging to create a
reasonably extensive and application-independent da-
tabase. Therefore, the field of hand gesture recogni-
tion is dominated by domain-specific databases some
of which are synthetic ones. In such databases, a
small set of application-specific gestures is conside-
red which the training is mainly accomplished based
on its pixel-level information (Sharp et al., 2015). As
a result, this pixel-based training seems to be one of
the reasons that the training of the system should be
accomplished on many different positions and vie-
wpoints. An alternative approach is to construct a
database with the focus on pose-vector information
instead of pixel-level (pixel-vector).
However, to our knowledge, creating a compre-
hensive (application-independent) synthetic database
based on pose-vector seems to be difficult. That is
mainly because of the high dimension (66 DoF) and
time complexity of such a process (≈ 10
164
poses for
1
◦
step changes). Using the kinematic constraint of
the hand will help to reduce the hand’s DoF to 28 si-
milar to (Zhao et al., 2012). However, the number
of poses is still too big (≈ 10
45
) for many systems to
handle its construction, training, and optimization.
In this paper, a novel construction of a fully
hierarchical database of the hand postures/gestures
is explained. That hierarchy provides a possibility
of considering a large number of poses (hence an
application-independent database) while requires a
low time-space complexity for construction. Furt-
hermore, two algorithms (random decision forest)
for training and (exhaustive search) for searching the
pose-space of this database are considered. Our fin-
dings show that the hierarchical definition of the hand
postures will improve their performance up to a great
extent.
The hierarchy proposed in this paper is inspired
by the idea of ‘finger-spelling’ suggested by (Mo and
Neumann, 2006). In their work, each finger can de-
monstrate a set of seven finger-states (Figure 1.a) and
five inter-finger-states (Figure 1.b). Those states cre-
ate a 12-dimensional spelling vector (five fingers plus
seven combinations) that introduces a grammar to the
finger’s motion. We use this grammar to decrease the
Dadgar, A. and Brunnett, G.
Multi-Forest Classification and Layered Exhaustive Search using a Fully Hierarchical Hand Posture/Gesture Database.
DOI: 10.5220/0006591601210128
In Proceedings of the 13th Inter national Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2018) - Volume 4: VISAPP, pages
121-128
ISBN: 978-989-758-290-5
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
121

(a) (b)
Figure 1: a) Seven Finger-Spelling-States: Up, Forward,
Side (only thumb), Half-Bend, Bend, Half-Close/Close. b)
Five Inter Finger Spelling States: Group, Separate, Cross1
(j on i), Cross2 (i on j), Loop (for Thumb with all other
fingers) (Mo and Neumann, 2006).
large number of DoF in the fingers when constructing
a hand-pose database within a fully hierarchical man-
ner. At the same time, we enrich the database by
containing a higher number of poses (Section 3). In
that context, we separate the fingers’ motion from the
inter-fingers’ motion alongside from the wrist rota-
tion. These separations (hierarchies) extend the exis-
ting hierarchy in the work of (Keskin et al., 2012) that
only separates the global rotation-translation from the
rest of the hand-pose. The formulation of the database
can provide the possibility to consider and train lots
of different gestures of a hand in an efficient manner.
That can help to introduce an application-independent
database. We hope, that feature finally leads to an
accepted benchmark within the research community.
A milestone which can facilitate the comparison and
the verification of different methodologies more sys-
tematic. Moreover, this database can introduce a new
vision to various machine learning algorithms and ad-
vance their performances. That can be accomplished
by enhancing the architecture of these algorithms and
their mathematical descriptions, using the provided
fully layered data structure.
2 LITERATURE REVIEW
The random (decision) forest (RDF) has been propo-
sed by (Breiman, 1999). RDF quickly became popu-
lar in the field of computer vision (Sharp et al., 2015),
object segmentation (Schroff et al., 2008), image clas-
sification (Bosch et al., 2007), and data mining (Ve-
rikas et al., 2011). The reason is that it works on
large databases efficiently, is very fast and is robust
to outliers (Breiman, 1999). Moreover, it can effecti-
vely generalize the high variations (nonlinearities) in
the data (Breiman, 1999; Shotton et al., 2013). Since
the output of the RGB/depth cameras can be highly
noisy and can exhibit a high level of variance, the
random decision forests are suitable for the classifi-
cation tasks in the area of computer vision too. The-
refore, many researchers, in both fields of the human
body and hand pose/gesture estimation, incorporated
the RDF in their frameworks (Camgoz et al., 2014;
Keskin et al., 2012; Sharp et al., 2015).
In all these works, however, RDF is mainly app-
lied within the pixel-level (shape (Keskin et al., 2012),
depth (Sharp et al., 2015)) classification fashion.
The pixel-level classifications using RDF have shown
acceptable results. However, they require a large
number of input variables (hundreds or thousands),
with each one containing only a small amount of the
overall image information (Keskin et al., 2012; Sharp
et al., 2015). Therefore, the entire random forest does
not model the whole pixel variations efficiently. As a
consequence, RDF only plays a complementary role
in a system for introducing a few more poses for each
frame (Sharp et al., 2015). Moreover, solely a limited
number of poses can be considered when the pixel-
level classification is employed. In other words, most
of the workload of the recognition is carried out by
the computationally expensive particle swarm optimi-
zation (Kennedy and Eberhart, 1995) framework.
Additionally, one of the main goals in training
the posture-space is to acquire the temporal infor-
mation of the gestures from a set of postures (Mi-
randa et al., 2012) and to capture the gesture spot-
ting information (Camgoz et al., 2014). However, in
all these works, employing the pose-vector (instead
of the pixel-vector) information, to model temporal
information, can be more convenient and more ef-
ficient. That together with the mentioned issues of
the pixel-level classification, can affirm the necessity
of a shift in considering the pose-vector data in trai-
ning the random decision forests. The requirement
which could be addressed more efficiently, by owning
a comprehensive and a fully-hierarchical database.
Nevertheless, some attempts are accomplished to
introduce a multi-layer database (Keskin et al., 2012).
They proposed the two-layer pose data: The first layer
for global rotation and translation (6 DoF) and the se-
cond layer for the local changes of the hand (22 DoF).
However, a two layer-only database does not help the
time-space complexity of a random decision forest
training to be reduced effectively. That is because the
highest variations of a hand postures/gestures are en-
coded in the local changes of that hand (fingers and
wrist together possess 22 DoF out of 28). Therefore,
we propose a fully-hierarchical database which for-
mulates global rotation and translation, wrist, inter-
finger and intra-finger rotations all separately. Below,
a brief detail of the random forest training is presented
first, to describe, how we can employ this algorithm
with our database, effectively.
2.1 RDF Training
To train a forest, first, the training set should be defi-
ned as D = {(X
1
,Y
1
), ..., (X
n
,Y
n
)}. Here, (X
1
, ..., X
n
)
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
122

corresponds to the pose-vector at each layer, and
(Y
1
, ...,Y
n
) represents their respective class labels.
Since a forest consists of several decision tree clas-
sifiers {t(x, φ
k
), k = 1, ...} (Breiman, 1999), each tree
t(x, φ
k
) is left to grow until the forest is constructed.
Here, x is an input vector and φ
k
is a random vec-
tor generated from a process which is named “data
bagging”. At each node of the tree, m features are
selected randomly from the available, d dimensions
(m < d). That process is called “feature bagging”.
Then from those selected features, ones which split
the node with the most information gain are chosen.
Although RDF has been utilized to the mentio-
ned fields successfully, it still has two main draw-
backs hidden in its structure (Shotton et al., 2013).
First, training the decision tree is an NP-hard pro-
blem. Second, deep-trees (with exponential growth
of the time-space complexity) illustrate more accurate
results than large ones. To address these issues, we
employ the RDF classification approach in a multi-
layered way (Section 4.1) using our fully-hierarchical
database. Therefore, in the following section, the for-
mulation and the construction of this database is des-
cribed first.
3 HIERARCHICAL SYNTHETIC
DATABASE
We propose a 31-layer hierarchical database defi-
ned by a set of primitive- and compound-layers.
The primitive-layers divide the 28 DoF pose-vector
such that each of these divisions corresponds to one
primitive-layer (Figure 4).
We remark the following phases to define our hier-
archy thoroughly. First, we determine the 28 DoF
hand’s pose vector:
−→
V = {v
i
|i = 1, 2, ...28}, where
{v
1
, v
2
, v
3
} is the global translation (3 DoF),
{v
4
, v
5
, v
6
} is the global (Arm) rotation (3 DoF),
{v
7
, v
8
, } is the wrist rotation (2 DoF),
{v
9
, v
10
, v
11
, v
12
} is the little finger rotation,
{v
13
, v
14
, v
15
, v
16
} is the ring finger rotation,
{v
17
, v
18
, v
19
, v
20
} is the middle finger rotation,
{v
21
, v
22
, v
23
, v
24
} is the index finger rotation and
{v
25
, v
26
, v
27
, v
28
} is the thumb finger rotation.
Second, we determine the relation of above vector
with first three layers of global translation (L ayer
1
or
L
1
), global rotation (Layer
2
or L
2
) and wrist rotation
(Layer
3
or L
3
). In that direction, as shown in Figure 2,
the L
1
(red bits), L
2
(blue bits) and the L
3
(orange bits)
can be separated from the fingers’ information of the
hand pose-vector. Now, we can construct the poses
of these layers by defining a step-degree, which spe-
cifies a resolution for these layers. For example, we
have constructed our low-resolution global-rotation-
layer (L
2
) by assigning each X,Y, Z component, va-
lues starting from −180 (lower bound). Then, we
have assigned five step-degree increments (72) until
they reached +180 (higher bound). Obviously, ba-
sed on the specification of an application one can de-
fine different step-degree, lower and upper bounds for
each of these three layers.
Third, using the inter-finger states (Figure 1.b) we
extract the Z rotation components of the lowest part
of the little, ring, middle, and index fingers. These
four components, namely {v
12
, v
16
, v
20
, v
24
}, are re-
sponsible for the inter-finger state changes. This 4
DoF which has been illustrated with green bits on
Figure 3, forms the layer five of the database and
contains information about the four fingers inter-state
changes. Each of this DoF can possess four different
values (shown in Figure 1.b) such as –crossed over–
crossed behind–grouped–separated– states. Note that,
the loop state is a state which can be defined by thumb
finger-state implicitly; thus, we explain it at the end of
the next paragraph. Now, we can achieve a cheap con-
struction of the poses of this layer in a resolution we
require. For example, we can determine the Layer
5
(L
5
) to be low-resolution when in that layer each inter-
state of the fingers is repeated only once.
Fourth, the remaining 16 DoF of the five fingers is
reduced to 5 DoF using the finger-states represented
in Figure 1.a. Here, each bit of this 5 DoF, corre-
sponds to one finger and is shown with white on Fi-
gure 4. In this layer (Layer
4
or L
4
), each of this 5 DoF
is the combination of 4 angles which can possess 6-7
different states. Therefore, they can be used to con-
struct finger poses in the same manner as inter-finger
layer (third step). As an example, we can define a
low-resolution layer, in which each of the finger sta-
tes is repeated only once. Hence, the amount of the
construction complexity is reduced considerably for
this layer. This layer (L
4
) is the most expensive layer,
of the hand pose-vector, for construction in the con-
ventional databases (16 DoF). Whereas, in our appro-
ach, instead of 16 DoF we consider 5 DoF, each of
which can have 6-7 different values (states). More-
over, we can increase the resolution of this layer by
considering each state twice or more. Thus, different
resolutions can be constructed in a controlled and a
meaningful manner. Moreover, with this formulation,
all five layers have a comparable number of dimen-
sions, 2 ≤ d ≤ 5. In Section 4.1 we show that such
homogeneous dimensions would be advantageous in
a hierarchical training process. It is important to note
that, in L
5
all inter-finger states are formulated expli-
citly except for the thumb inter-state. This finger’s
Multi-Forest Classification and Layered Exhaustive Search using a Fully Hierarchical Hand Posture/Gesture Database
123

Figure 2: Separation of the wrist, global rotation (arm) and
global translation.
Figure 3: Detaching the inter-finger layer from finger layer.
interstate (loop in Figure 1.b) is an interactive state
with all other four fingers. That enables us to for-
mulate it as the combination of thumb being forward
(with four different degree intervals pointing to other
four fingers) and the other fingers being at half-bend
state. Therefore, this inter-finger state is determined
implicitly, without increasing the DoF of the L
5
.
Finally, in our database, we name the layers from
one to five the ‘primitive’ layers. Since in these layers
‘only’ one of the categories at a time is under trans-
formation (Table 1). Note that, with different combi-
nations of these primitive layers more complex lay-
ers, such as 2-layer compound (Tables 2 and 3), 3-
layer compound, or 4-layer compound (Table 4) can
be constructed when it is required. For example, L
15
is the combination of L
4
and L
5
(Table 3). In other
words, in L
15
the finger states and the inter-finger sta-
tes are considered for transformation (Figure 4). Mark
that for the purposes of this paper’s experimentation
(Section 4), only 11 of them are necessary (namely,
the layers on Tables 1 and 3) and layer L
30
. Note
that, layers L
30
and L
31
(Table 4) contain all the in-
formation, the primitive-layers, which one can find in
conventional databases. However, in those databases
as a result of the high degree of freedom of the hand,
it is infeasible to construct a large number of the pos-
tures/gestures in practice. Therefore, as mentioned in
Section 1, they are restricted to a specific gestures’ vo-
cabulary. In our database, on the other hand, even if
the number of postures in each of the primitive layers
is low (100 poses), the overall number of poses could
be considered implicitly will be a significant number
(100
4
). This implicit number of poses will increase
even more when one constructs the mid-resolution
primitive-layers (around 1000 poses in each layer).
One can accomplish such an increase in the resolution
easily and cheaply. Thus, our way of formulating the
hand posture/gesture database provides a coherent ap-
proach, to potentially consider a huge number of po-
ses. At the same time, such a formulation decreases
the construction’s time-complexity significantly.
Figure 4: Creating the layers from pose vector.
Table 1: Primitive layers definition of the database.
Translation Only Forearm Only Wrist Only
Layer 1 Layer 2 Layer 3
Finger States Only Inter-Finger States Only
Layer 4 Layer 5
4 EXPERIMENTS
Two algorithms, namely, RDF classification and
exhaustive search, are selected to verify any possible
achievements on performance gain of the training and
the searching using our database. The aim is to com-
pare the performance of these two algorithms, using
two different databases: 1. the primitive layers of
our database (Table 1), 2. the conventional all-in-
one-layer database (L
30
in Table 4). In that context,
two classes of experiments are designed, using these
two algorithms; and their results are illustrated in the
Sections 4.1 and 4.2. To evaluate and analyze the per-
formance of our proposed hierarchical database dif-
ferent experiments with various setups and multiple
parameter values are conducted. However, only those
results which indicate high accuracy or significant im-
plication are reported.
It is important to note that, in our experimentation,
we do not consider the layer 1 and all those compound
layers which are defined by the layer 1 (Table 2). That
is mainly because the hand’s translation (layer 1) is
highly dependent on the experimental setup (back-
ground colors, camera parameters). Whereas, in this
paper, our two types of employed input, pose-vector
which is a set of degrees (instead of pixel-vector) and
synthetically generated cluttered-free images (using
OpenGL), are both experimental-setup independent.
Whilst, the central focus of this paper is to evaluate
the performance enhancement in training and opti-
mization phases, when our proposed database is em-
ployed. Therefore, discussion on layer 1 and all its
combinations, L
11
, are neglected in this paper. For the
same reason, all-in-one-layer database counterpart, in
the conventional systems, is a layer with the combi-
nation of 4 layers (L
30
).
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
124

Table 2: Two-Layer compound definition of the database
with layer 1.
L
1
,L
2
L
1
,L
3
L
1
,L
4
L
1
,L
5
L
6
L
7
L
8
L
9
Table 3: 2-Layer compound’s definition of the database wit-
hout layer 1.
L
2
,L
3
L
2
,L
4
L
2
,L
5
L
3
,L
4
L
3
,L
5
L
4
,L
5
L
10
L
11
L
12
L
13
L
14
L
15
4.1 Exp1: Multi-Forest Classifier
Training of the Pose Space
A multi-forest classification framework (similar to
(Keskin et al., 2012), but on the pose-vector) is desig-
ned, to address the mentioned issues exist in one ‘big
forest’ classifier (Section 2). This multi-forest frame-
work is employed, in our proposed fully-hierarchical
database (Section 3), within the following steps. First,
for each of the primitive layer, one forest (Bradski,
2000) is trained. Second, meaningful relations, ba-
sed on the hierarchy of our database, are introduced
between those forests. These relations (links) extend
the standard random decision forest to a multi-forest
random decision structure.
In this category of experimentation, the OpenCV
random forest framework (Bradski, 2000) for the pur-
pose of training and evaluating our database, is utili-
zed. In the scope of our paper, it is acceptable if we
reuse the training set in the testing phase. The logic
behind that is the focus we have to compare different
types of databases (not different types of classifica-
tion algorithms). In other words, we aim to show that,
one training algorithm (here a classifier) can train the
pose-space of a hierarchical hand database more ef-
fectively in comparison to a conventional database.
Since the pose-space consists of pose-vectors (set of
degrees), the classification rates indicate how well the
forest can model this pose space. Moreover, we use
this setup for all forests in this paper. Therefore, the
comparison between the forests is reliable.
In that context, for each experiment, we set the
maximum-depth of each tree and the maximum num-
ber of trees. The other parameters, such as minimum-
samples required at a leaf node for it to be split, ter-
mination criteria, and sufficient accuracy, are set glo-
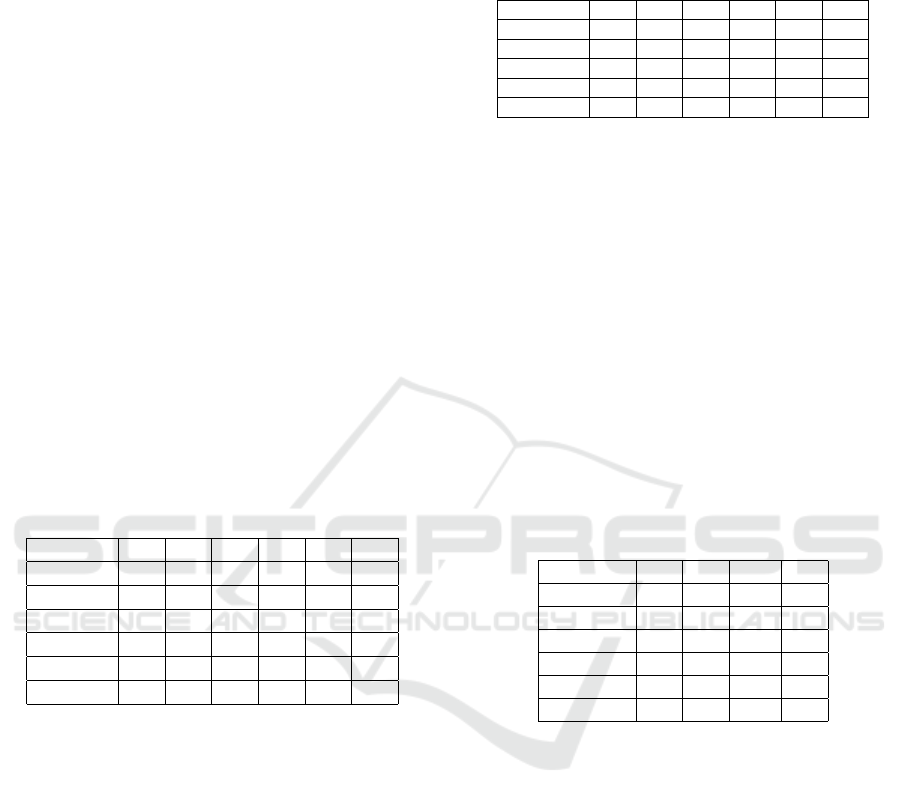
bally. Moreover, in Tables 5, 6, 7, and 8, the test rate,
training time, and the number of nodes are calculated
in the OpenCV framework. Additionally, in those ta-
bles, the sample, feature and bagged feature rows are
the characteristics of a layer which is under that ex-
periment. It is important to note that in those tables,
the number of nodes and training time indicate the
Table 4: All-In-One-Layer equivalent to conventional DBs.
L
2
,L
3
,L
4
,L
5
L
1
, L
2
,L
3
,L
4
,L
5
L
30
L
31
space and time complexities, respectively. As menti-
oned earlier, the test rate also indicates how well the
forest(s) train (model) the pose-space. To evaluate the
method, two experiments are designed.
Exp 1.a) 2-Layer-Compound Training: The aim of
the first experiment, in this category, is to illustrate
that the multi-forest approach, compared to one ‘big’
random forest, improves the classification rate in the
complex layers. To achieve that goal three steps are
considered, as follows:
First, one forest is trained on each of the low-
resolution primitive layers (L
2
, L
3
, L
4
, L
5
). The para-
meters in these forests, such as the max-depth (=9)
and the number of trees, are set empirically to keep
the classification rates the highest. At the same
time, these parameters values help to retain a low
space-complexity (number of nodes) and a low time-
complexity (Table 5).
Table 5: One forest is trained and tested for each primitive
layers. Maximum depth of all forests is 9.
Layer 2 3 4 5
Samples No 125 100 186 54
Features No 3 2 16 4
Trees 18 46 54 12
Nodes 2000 2194 6454 554
Train Time (s) <1 <1 <1 <1
Test Rate (%) 91.2 82.00 81.72 88.89
Second, for each of the 2-layer-compound layers
(L
10
, L
11
, L
12
, L
13
, L
14
, L
15
), one ‘big’ forest is trained.
This time the max-depth is kept unchanged (=9). Ho-
wever, the trees’ number is set up to the addition of
the trees’ numbers in the corresponding primitive lay-
ers. It is also clear that the number of samples in these
compound layers should be (≈) the product of the
samples’ number in the corresponding primitive lay-
ers (L
10
contains 12500 = 125 × 100 samples). The
motivation that only the 2-layer-compound layers are
considered, in this step, is the large size of 3-/4-/5-
layer compound layers (> 15000 samples). This size
is the threshold value for the size of a database which
above that the 32-bit system is incapable of training
one big forest. Therefore, one can not test both (‘big’
forest and the multi-forest) frameworks on them to
compare their differences. That is why also, for L
11
and L
13
, which their size is slightly bigger than this
number, their samples number is cut off to 15000.
From the results (Table 6) it can be observed that,
Multi-Forest Classification and Layered Exhaustive Search using a Fully Hierarchical Hand Posture/Gesture Database
125
despite the considerable increase in the number of
created nodes (bigger forests), the classification rates
decrease extremely. That illustrates that one big fo-
rest, equal to the size of both smaller forests, could not
model the entire space of a bigger database efficiently.
Furthermore, this suggests, the decrease of classifica-
tion rates could be even more severe for more com-
plex layers (3-/4-/5-layer compound). It is impor-
tant to mark that we could achieve better test rates
by increasing the number of trees significantly (e.g.
2000). Such a substantial increase in trees’ number
helps some layers to achieve test rates as high as 79%,
91%, 86% and 75% (for layers L
10
, L
12
, L
14
and L
15
,
respectively). However, this increase in the number of
trees leads to a considerable increase in space (num-
ber of nodes) and time complexity (average: 800, 000
nodes and 9, 500 seconds) for all layers. Moreover,
an effective increase in the test rates (49%, 35%), for
layers L
11
, L
13
, respectively, is not observed. Those
complexities could grow even more severely for more
compound layers (e.g. L
30
). Therefore, the substan-
tial limitation that one ‘big’ forest is encountered to
train a large database is suggested.
Table 6: One big forest (equal to the size of both primitive
forests) is trained and tested for two-layer compounds.
Layer 10 11 12 13 14 15
Samples No 12500 15000 6750 15000 5400 10044
Features No 5 19 7 18 6 20
Trees 64 72 30 100 58 66
Nodes 32046 35002 14020 40898 23440 32474
Train Time (s) 19 69 33 90 39 388
Test Rate (%) 15.42 10.96 17.14 10.36 26.17 16.47
Finally, the same layers with the same number of
samples (as in step 2) are selected, but this time are
‘tested’ only within the multi-forest framework. Each
forest is, first, trained on the primitive layers (Table
5). Then, according to the definition of the compound
layers (Table 3), they are linked to each other in a lay-
ered manner (multi-forest). The test rates (Table 7)
illustrate a significant improvement in the classifica-
tion rates of the multi-forest compared to the second
step (Table 6). As expected, the test rates, in this step,
are close to the product of the estimated test rates in
the corresponding primitive layers. That suggests the
error rate in one ‘big’ forest is accumulative. Additi-
onally, the time complexity and the space complexity
of each multi-forest are the summation (linear gro-
wth) of the same complexities at the corresponding
primitive layers. Hence, enabling the decision forest
to model the data using deep-trees (implicitly) and,
thus, to eliminating the exponential growth of these
complexities.
Table 7: Multi-Forests are tested-only on the same combi-
ned layers. This collection of forests is trained on the pri-
mitive layers.
Layer 10 11 12 13 14 15
Samples No 12500 15000 6750 15000 5400 10044
Features No 5 19 7 18 6 20
Trees 64 72 30 100 58 56
Nodes 4274 8534 2634 8648 2748 7008
Test Rate (%) 76.36 78.19 81.77 69.92 73.78 74.07
Exp 1.b) Mid-resolution Primitive Layer Training:
This experiment aims to increase the classification ra-
tes of the primitive-layers to the highest possible point
(Table 8). This goal is sought to be achieved by in-
creasing the samples’ number of the primitive layers
(to constructing mid-resolution primitive-layers) and
training one ‘big’ forest for each. The motivation be-
hind this experiment is to illustrate that, for all-in-one-
layer conventional databases, the accumulative errors
can be quite low (less than 5%). This resolution en-
hancement also provides more freedom in the creation
of different possible poses in the compound layers.
Note that in this experiment, the max-depth is set to
17.
Table 8: One forest is trained and tested on Mid-resolution
primitive layers. That boosts the multi-forest performance
(less accumulative error).
Layer 2 3 4 5
Samples No 1331 1369 9072 54
Features No 3 2 16 4
Trees 26 179 109 44
Nodes 28732 81569 456229 39346
Train Time (s) 2 8 535 3
Test Rate (%) 98.27 99.12 99.47 99.13
4.2 Exp2: Layered Exhaustive Search
for Pose Estimation
Exhaustive search strategy inquires the whole data-
base and then, estimates the best pose according to
a score-penalty function. Therefore, when large da-
tabases are considered, reaching a solution will con-
sume considerable time-resources. Hereupon, we se-
lect that naive approach, to show that incorporation of
our hierarchical database converts that costly search
to a feasible task.
In that context, a set of synthetic input images, in
total 224, is chosen from layer 30 (L
30
). It has been
mentioned in Section 3, layer 30 is the combination
of four different layers. Thus, full construction of this
layer (in low resolution) could contain around 100
4
poses. That is an expensive process for our system,
however, for the inputs, we need the compound po-
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
126

ses of that layer. Therefore, we construct this layer
in an every other ‘n’ pose format. There, we aim
to cover many different labels of the primitive layers.
At the same time, we keep the construction complex-
ity of the layer, affordable for our system (224 po-
ses). Then, the 2D RGB images with a non-cluttered
(white) background of these poses are created using
OpenGL specification. After a simple contour ex-
traction using OpenCV library (Bradski, 2000), we
employ it as an input for the layered-exhaustive se-
arch. Then, this image contour is compared with the
pose contours of the primitive layers, in a layered pro-
cedure, as follows. The exhaustive search starts from
the lowest layer (L
2
) which contains the global rota-
tion of the hand. It creates the 2D RGB images of that
layer, extracts the contour of the hand and compares
them all with the input contour (one-by-one) using a
simple penalty function (Chamfer distance (Gavrila,
2007). The optimum pose of that layer, the pose
which has the lowest distance, is considered as the
partial solution. Then, the higher layer poses (L
3
),
which contains the writs rotation of the hand, will be
constructed on top of the previous partial solution.
That process continues, until all primitive layers are
searched. Finally, the compound pose of those esti-
mated primitive layers is considered as the output of
the system. To measure the accuracy of the layered-
exhaustive search the average Euclidean distance, be-
tween the estimated joints and the ground-truth, is
calculated. Note that, if each layer contains n poses,
with our approach, the system searches at most 4 ×n
(around 4 ×100 poses in our low-resolution database)
instead of n
4
poses (100
4
). In that context, five diffe-
rent experiments are designed, as follows:
Exp 2.a) Global Rotation Estimation: The aim of
the first experiment of the second category is to ex-
amine the exhaustive search performance within the
global rotation estimation (L
2
) only. Therefore, the
effect of the bind-pose configuration of fingers and
wrist should be eliminated. To that, all fingers are cut
off (v
12
, v
16
, v
20
, v
24
, v
26
are set to 180
◦
), whereas, the
wrist pose is set to the bind pose (v
7
, v
8
are set to 0
◦
).
Since the arm-rotation causes the greatest variation in
the hand’s shape, the performance of this stage has a
considerable influence on the overall success of the
system. In Figures 5 and 6, the total of 33 correct
estimations out of 224 inputs can be observed.
Exp 2.b) Global Rotation Estimation using Known
Wrist: In this experiment, the focus is to increase
the recognition rate of the global rotation. For this
reason, the finger and inter-finger layers’ status is kept
the same as the previous experiment. However, the
wrist information of each input is retrieved from the
ground-truth. As it is shown in Figures 5 and 6 we
Figure 5: Mean error of all 224 returned poses.
could achieve higher recognition rates. That suggests
that if the wrist pose is known for each input image,
by utilizing our proposed database, one can achieve
180 correct estimations (80%) on the difficult task of
the global rotation estimation.
Exp 2.c) Finger and Inter-Finger Pose Estimation
using Known Arm and Wrist Poses: This experi-
ment is designed to measure the estimation perfor-
mances of the finger layer and the inter-finger layer.
However, the arm and wrist pose is retrieved from
the ground-truth information. Despite the known
ground-truth information of the arm and the wrist, the
layered-exhaustive search can be efficient on a, still,
relatively, high dimensional space of 20 DoF. More-
over, in the ‘hand-posture’ recognition pipeline, by
definition, the pose accuracy of the finger layer and
the inter-finger layer are more important than the ot-
her layers. Thus, achieving high recognition rates for
these layers would suggest a promising horizon for
any further consideration and design using this data-
base. In Figures 5 and 6, the recognition rate is 60%
(135 correct estimations). Note that, the erroneous
outputs are mostly due to 1-/2-DoF-only false recog-
nition (additional materials) and many inputs’ fingers
are invisible.
Exp 2.d) Arm, Finger, Inter-Finger Pose Estima-
tion using Known Wrist Pose: To set up a more
challenging experiment, this time only the wrist pose
is retrieved from the ground truth. Therefore, the sy-
stem has to estimate the postures of all the other lay-
ers such as the arm, the finger and the inter-finger.
Despite the hard task, the naive search strategy, sim-
ple score function, and a greater DoF (23), the esti-
mation rate seems to be acceptable, Figures 5 and 6.
Exp 2.e) All four layers of the Arm, Wrist, Fin-
ger, Inter-Finger Estimation: Finally, the system is
set to search in all four layers of this paper’s interests
(25 DoF). Although the number of correct recognition
decreases considerably, only five correct recognition,
however, most outputs have sensible (visually) relati-
ons with their inputs (additional materials).
5 CONCLUSIONS
Experimentation described in Section 4.1 illustrated
the random decision forest improvement of perfor-
Multi-Forest Classification and Layered Exhaustive Search using a Fully Hierarchical Hand Posture/Gesture Database
127

a b c
Figure 6: Results of the layered-exhaustive search: a. The average Euclidean distance (estimation error), b. Estimation time
of the searches and c. Percentage of the correct estimation for each experimentation
mance when our database is used for training (even if
the repetition of each label in the training set is only
once). Our database led the RDF to create a fewer
number of trees/nodes and to achieve a higher accu-
racy (Exp 1.a). Moreover, the accuracy increased furt-
her if an appropriate higher resolution, of poses for
the primitive-layers, is considered (Exp 1.b). These
improvement were because of the following reasons.
Firstly, it equipped the system to search through deep-
trees –layer-by-layer– implicitly. Thus, this could
lead to the increase in accuracy with almost no com-
putational overhead. Secondly, the shift in the forest’s
training, from pixel-level to pose-vector, could eli-
minate the disadvantages of the pixel-level training
using random forest mentioned in Section 2. More
specifically, in our experimentation, it reduced the in-
put vector size from hundred or thousand to 28 (DoF
and less). That was because there are more significant
variances (amount of information) to the pose-space
than the pixel space.
Moreover, our hierarchical database, introduced
the possibility, to employ the costly exhaustive search
with acceptable performance. The layered-exhaustive
search has difficulties, mainly, in the correct estima-
tion of ‘semi-global’ (wrist) rotation. However, in the
results of this experimentation (Section 4.2) if we to-
lerate minor errors (10%) in the accuracy, the recog-
nition rates, in Exp 2.c and Exp 2.d, will illustrate an
acceptable accuracy (98% and 79%, respectively).
REFERENCES
Bosch, a., Zisserman, A., and Muoz, X. (2007). Image
Classification using Random Forests and Ferns. IEEE,
ICCV , 11th Inter Conf on Com Vis, pages 1–8.
Bradski, G. (2000). The OpenCV Library. Dr. Dobb’s Jour-
nal of Software Tools.
Breiman, L. (1999). Random Forests. Machine Learning,
45(5):1–35.
Camgoz, N. C., Kindirolgu, A. A., and Akarun, L. (2014).
Gesture Recognition using Template Based Random
Forest Classifiers. Europeann Conf on Com Vis
(ECCV) Chalearn Workshop, pages 579–594.
Gavrila, D. M. (2007). A Bayesian, exemplar-based appro-
ach to hierarchical shape matching. IEEE Trans on
Pattern Anal and Machine Intel, 29(8):1408–1421.
Heimonen, T., Hakulinen, J., Turunen, M., Jokinen, J. P. P.,
Keskinen, T., and Raisamo, R. (2013). Designing
gesture-based control for factory automation. Lec No-
tes in Com Sci, 8118 LNCS(PART 2):202–209.
Jacob, M. G., Li, Y. T., and Wachs, J. P. (2011). A gesture
driven robotic scrub nurse. IEEE Int Conf on Sys, Man
and Cybrntcs, pages 2039–2044.
Kennedy, J. and Eberhart, R. (1995). Particle swarm optimi-
zation. Neural Net, Proc., , IEEE International Conf.,
4:1942–1948.
Keskin, C., Kirac¸, F., Kara, Y. E., and Akarun, L. (2012).
Hand pose estimation and hand shape classification
using multi-layered randomized decision forests. Lec.
Notes in Com Science, (P6):852–863.
Miranda, L., Vieira, T., Martinez, D., Lewiner, T., Vieira,
A. W., and Campos, M. F. M. (2012). Real-time ge-
sture recognition from depth data through key poses
learning and decision forests. Brazilian Symp of Comp
Grph & Im Proc, pages 268–275.
Mo, Z. and Neumann, U. (2006). Real-time hand pose re-
cognition using low-resolution depth images. Proc. of
the IEEE Com. Society Conf. on Com. Vis. and Pattern
Recognition, 2:1499–1505.
Schlenzig, J., Hunter, E., and Jain, R. (1994). Re-
cursive identification of gesture inputs using hidden
Markov\nmodels. IEEE Proc on Apps of Comp Vis,
pages 187–194.
Schroff, F., Criminisi, A., and Zisserman, A. (2008). Object
Class Segmentation using Random Forests. Proc of
the British Machine Vision Conf, pages 54.1–54.10.
Sharp, T., Keskin, C., Robertson, D., Taylor, J., Shotton,
J., Kim, D., Rhemann, C., Leichter, I., Vinnikov, A.,
Wei, Y., Freedman, D., Kohli, P., Krupka, E., Fitzgib-
bon, A., and Izadi, S. (2015). Accurate, Robust, and
Flexible Real-time Hand Tracking. ACM Conf on Hu-
man Factors in Comp Sys (CHI), pages 3633—-3642.
Shotton, J., Sharp, T., and Kohli, P. (2013). Decision Jung-
les: Compact and Rich Models for Classification.
Starner, T. E. and Pentland, A. (1995). Visual Recogni-
tion of American Sign Language Using Hidden Mar-
kov Models. Media, pages 189–194.
Verikas, A., Gelzinis, A., and Bacauskiene, M. (2011). Mi-
ning data with random forests: A survey and results of
new tests. Pattern Rec., 44(2):330–349.
Yuille, A. and Kersten, D. (2006). Vision as Bayesian in-
ference: analysis by synthesis? Trends in Cognitive
Sciences, 10(7):301–308.
Zhao, W., Chai, J., and Xu, Y.-Q. (2012). Combining
marker-based mocap and RGB-D camera for acqui-
ring high-fidelity hand motion data. Eurographics
ACM SIGGRAPH Symp on Comp Animation.
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
128
