
Real Time Mortality Risk Prediction: A Convolutional Neural
Network Approach
Landon Brand, Aditya Patel, Izzatbir Singh and Clayton Brand
Stasis Labs, Los Angeles, U.S.A.
Keywords: CNN, Machine Learning, Mimic, Mortality Prediction.
Abstract: Machine Learning in Healthcare shows great promise, but is often difficult to implement due to difficulties
in collecting data. We used a 1-dimensional convolutional neural network(CNN) on limited data to show a
practical application of deep learning in healthcare. We used only vital signs data that can be collected from
low cost, readily available hardware designed for non-critical care settings, and a dynamic model that
updates as more data is collected over time. Our data is derived from the MIMIC dataset. We use 320
patients for testing and 2,990 for training the model. The CNN model predicted mortalities with up to a
76.3% accuracy, and outperformed both recurrent neural network and multi-layer perceptron models. To our
knowledge, the proposed methodology is the first of its kind to predict mortality risk scores based on only
heart rate, respiratory rate, and blood pressure, three easily collectible data.
1 INTRODUCTION
1.1 Background on Severity Scores in
Mortality Prediction
Electronic Medical Records (EMR) have been a rich
source of patient care data for predictive risk
assessment models. Utilizing this data could
significantly improve severity of illness assessments
and assists clinicians in deciding interventions for
patients. Several scores have been devised and tested
to predict Mortality risk using the first 24 hours of
patient physiological measurements after ICU
admission. Widely used severity scores in clinical
practice are APACHE II (Knaus et al., 1985) (Acute
Physiology and Chronic Health Evaluation) and
SAPS II (Le Gall, Lemeshow and Saulnier, 1993)
(Simplified Acute Physiology Score). These scores
have been modified over time to improve their
predictive performance. The initial scores
proposed—APACHE (Knaus et al., 1981),
APACHE II (Knaus et al., 1985) and SAPS (Le Gall
et al., 1984)—relied on assigning weights to
physiological measures, decided by a panel of
experts, whereas SAPS II (Le Gall, Lemeshow and
Saulnier, 1993) was obtained through Statistical
modelling techniques. Studies have been conducted
to validate (Knaus et al., 1985) and compare (Nassar
et al., 2012; Poole et al., 2012) the reliability of
these severity scores for predicting risk, but even
after revisions the probability of mortality is
overestimated by these scores (Nassar et al., 2012;
Poole et al., 2012). Further modifications on severity
scores included APACHE IV and SAPS 3 scores,
but their performance as evaluated in (Nassar et al.,
2012) was no better than the existing scores.
Most of these scores are based on logistic regression
models. Logistic regression models run on strict
assumptions on dependent and independent variables
which may not be always true. For instance, some
interventions may impact patients in a non-linear
way. Non-parametric methods have been used to
overcome the constraints of logistic regression
models. Studies have shown that non-parametric
methods based on neural networks can perform at
least to the baseline models given by logistic
regression models (Dybowski et al., 1996; Clermont
et al., 2001; Foltran et al., 2010; Kim, Kim and
Park, 2011; Ribas et al., 2011).
1.2 Background on Machine Learning
in Healthcare
In statistics and healthcare, Autoregressive
Integrated Moving Average (ARIMA) models are
widely used in time series forecasting. These models
don’t assume any prior knowledge about underlying
model and depends only on past data and error
Brand, L., Patel, A., Singh, I. and Brand, C.
Real Time Mortality Risk Prediction: A Convolutional Neural Network Approach.
DOI: 10.5220/0006596204630470
In Proceedings of the 11th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2018) - Volume 5: HEALTHINF, pages 463-470
ISBN: 978-989-758-281-3
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
463

values which makes them more robust and easy to
explain. But these models are generated based on an
assumption that time series are generated from linear
processes which makes it inappropriate for real
world problems. On the contrary, deep learning
methods are self-adaptive with few prior
assumptions. They are able to generalise the
learnings from original data and are good for solving
non-linear problems. Hence, ARIMA models are out
of scope for this paper. There exists literature
comparing traditional moving average models and
Neural networks for time series forecasting
(Guoqiang Zhang, B.Eddy Patuwo and MichaelY.
Hu, 1998; Adebiyi, Adewumi and Ayo, 2014).
Machine learning has been successfully used for
many health-care related tasks, such as arrhythmia
detection (Rajpurkar et al., 2017), clinical
intervention prediction (Suresh et al., 2017), ICU
transfer prediction (Yoon et al., 2016) and more.
These models have proved to perform up to the
benchmarks and even beat the benchmarks in some
cases. Regression based algorithms, Super learners
were developed to choose an optimal regression
model from a given set of models (Dudoit and van
der Laan, 2005) for improving severity scores.
Reference (Pirracchio, 2016) gives a severity score
based on a super learner validated on the MIMIC II
data set.
EMR data makes many machine learning prediction
tools possible. It has encouraged the use of complex
algorithms like Artificial Neural Networks and
Decision Trees in healthcare problems. These new
modelling approaches lead to many predictive
models for different critical care settings (Ganzert et
al., 2002; Moser, Jones and Brossette, 1999; Morik
et al., 2000; Sierra et al., 2001; Kong, Milbrandt and
Weissfeld, 2004; Kreke, Schaefer and Roberts,
2004; Lucas, 2004). Reference (Kim, Kim and Park,
2011) compares results of machine learning
techniques for Mortality prediction models inside
ICU.
Deep Neural Networks (DNNs) have been shown to
be effective in predicting mortality in paediatric
healthcare settings (Aczon, Ledbetter et al, 2017)
(Nguyen, Tran and Venkatesh, 2017). They are
especially useful when dealing with high
dimensional data, which is common in healthcare.
Though Recurrent Neural Networks (RNNs) are
used more often for time-series data, recently
Convolutional Neural Networks (CNNs) have also
been used with medical time series data to achieve
state of the art results (Suresh et al., 2017).
1.3 Limits on Available Data
Though it is easy to develop machine learning
models that can work after a patient has left the
hospital, in non-critical care settings most data is
inputted into EMR in an untimely manner after it is
recorded (McGain et al., 2008). However, there are
products that will monitor patients continuously and
automatically send the data to a central server,
specifically designed for non-critical care settings.
Over the past 15 years, numerous vital signs
monitoring systems have been developed for non-
critical care settings (Patel et al., 2012). These
monitoring systems might not capture all the
information that is captured inside the ICU, but they
do capture body vital signs.
On sharing of health care data, The Health
Information Technology for Economic and Clinical
Health (HITECH) Act(HITECH Act Enforcement
Interim Final Rule | HHS.gov, 2009) promotes the
meaningful use of EMR data. But this data comes
with privacy concerns. There are strict laws
governing the use of this data. The Health Insurance
Portability and Accountability Act (HIPAA)
regulations apply on all the health care providers to
protect the patient information. Patients are given
rights to control their medical data under the Act.
All the data is owned by the patients and a written
consent is required to use it. Any violation of the Act
will attract both civil and criminal penalties. This
makes it difficult for researchers and practitioners to
make use or share the health care data for
experiments.
The potential impact of Machine Learning in
healthcare is large, however it is difficult to
implement machine learning solutions in real
clinical settings. To be deployed to real settings,
machine learning algorithms must use data that is
accessible. For algorithms that rely on making
predictions using extensive accurate, time-sensitive
data, this is problematic. In non-critical care settings
patient monitoring is not continuous. The data
collected in such settings may be incomplete and
may take hours before being reported to the system.
Hence the above-mentioned machine learning
models might not perform as desired because of
incomplete data. To address this, in this paper we
discuss a model using a CNN which predicts
mortality risk in settings where access to data is
limited.
HEALTHINF 2018 - 11th International Conference on Health Informatics
464
2 METHODS
2.1 Data Source
We use data from the Medical Information Mart for
Intensive Care (MIMIC-III) database (Johnson et al.,
2016). MIMIC-III is a deidentified publicly
available dataset that contains detailed health
records from approximately 40,000 critical care
patients, including vital sign recordings. We
consider only patients that have at least 12 hours of
records where each hour has at least 1 recording for
heart rate, respiratory rate, systolic blood pressure,
and diastolic blood pressure. There are 1,814 of
these patients who passed away during their hospital
stay, which we consider to be the mortality class.
The number of patients who have the requisite vital
sign recordings but survive their stay in the hospital
is larger, but we take only the first 1,814 of these
patients, as ordered by the MIMIC database, into
consideration so that the 2 classes are equal size.
This leads us to use 3,628 patients in total, exactly
half of which are survivors and the other half of
which are mortalities.
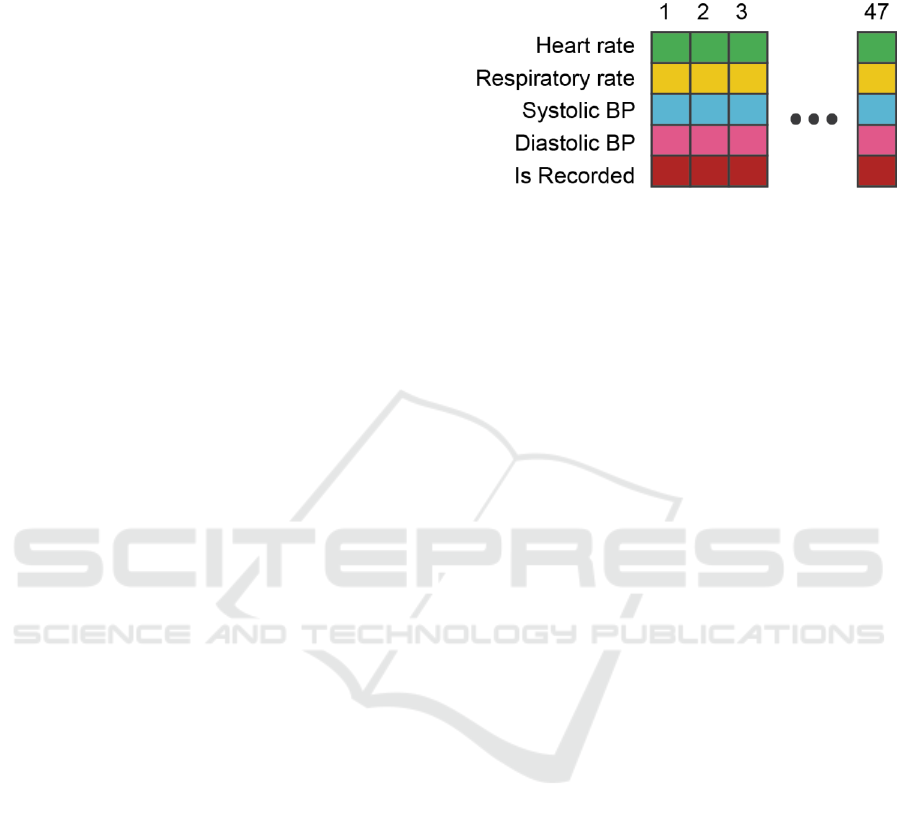
2.2 Data Preparation
To simulate non-critical care settings, we consider
only physiological vital sign data to make our
predictions. For each patient, we construct a 5 x 47
matrix where each row contains 47 readings
corresponding to each hour of their stay. The 4 vital
signs we use are heart rate, respiratory rate, systolic
blood pressure, and diastolic blood pressure. The
data is normalized per feature, such that the mean of
each vital sign is 0, and the variance of each vital
sign is 1. We then simulate the patient’s stay by
creating a matrix that resembles the available data
for each hour of their stay, for a total of up to 47
separate matrices for each patient used as input to
our model. This way we limit the threshold of data
collected to 47 hours for each patient to make the
prediction. We also add an additional row of the
matrix to denote whether there is data yet recorded
for each hour. This row is 0 for time values where
no vital signs are yet recorded, and 1 for time values
where vital signs are present. To make it real time
and adaptive to variable time lengths, we increase
the sample size by assuming a new sample for each
hour of patient vitals recorded. This simulates a
patient’s stay in a non-critical care setting (Figure 1).
Each hour, their vital signs are recorded, and the
model can be re-run using this new data for a more
accurate estimate.
Figure 1: Diagram of the final input to the model after data
preparation.
In the MIMIC dataset, some patients have more vital
sign recordings per hour than others. In this case, we
simply take the last vital sign recorded in that hour
as the value to go in the matrix.
At this point, there are 170,516 samples that
correspond to a specific hour of a patient’s stay. We
then take out 15,000 of these samples to use in the
validation data set, and another 15,000 of these
samples to use in the testing data set. We use the
validation data set to tune our hyperparameters for
the models, and the testing data when evaluating the
models in section 3. The remaining 140,516 samples
are used as the training data
2.3 Convolutional Neural Networks
(CNNs)
2.3.1 Basic Structure
Neural Networks employ the back-propagation
algorithm to calculate optimum weights to predict
the output class (Equation 1). The output of a single
neuron is defined as
of j
th
row and l
th
layer, where
w
l
are weights connected to the l
th
layer of neurons
and sum is over all k neurons in the (l-1)
th
layer. The
aim is to find weights, which ensure that for each
input the output produced by the network is the same
as the desired output vector. To minimise the error,
gradient methods are used, and the errors are back
propagated through chain rule. A comprehensive
review is provided in (Lecun et al., 1998;
Krizhevsky, Sutskever and Hinton, 2012a)
(1)
Convolutional neural networks (CNN) stand out as
an example of neuroscientific principles influencing
neural network architecture (Goodfellow, Bengio
Real Time Mortality Risk Prediction: A Convolutional Neural Network Approach
465

and Courville, 2016). CNN Models enable us to
exploit a multiple layer architecture for non-linear
information processing, to extract features for
classification tasks (LeCun et al., 1989). CNN
architectures come in various forms but usually they
consist of modules, which have a convolution, and
pooling (subsampling) layer. These modules are
stacked on top of each other to create deep learning
models. The last of these modules are connected to a
fully connected feed forward neural network to do
the classification tasks. As given in (Lecun et al.,
1998) Figure. 2 illustrates a typical CNN Model.
Figure 2: Illustration of typical CNN Architecture.
In deep CNN layers, units in the deeper layer can
indirectly interact with large portions of the input
which lead it to learn the underlying
structure/patterns of the input data without using
hand designed features. This enables us to find
features which we might miss out on using other
types of models. Mathematically convolution can be
defined by (Equation 2), where s(t) is the output,
x(a) is the input weighted by the weighting function
w(a). Convolution in CNN’s are defined by
(Equation 3) where, h
j
(m)
is the output of the m
th
layer with weights w, input v, bias a
j
and the
activation function. The function the layer learns
contains local interactions and is equivariant.
(2)
(3)
Usually pooling layers provide summary statistics of
nearby outputs in the feature map. The use of
pooling layers enables us to make the representation
become invariant to small translation of the input.
The applications of CNNs are widely in image
processing domain, but the CNN architecture can
also be applied in time domain to make sense of
temporal data.
2.3.2 Model Architecture
In our current architecture, we apply CNN on time
domain on multivariate time series. The inspiration
to use a CNN to predict mortality is attributed to the
sparse interaction in the feature map, weight sharing,
and equivariance CNNs offer. The sparse interaction
enables us to process the input quickly in real time,
weight sharing aids in finding patterns along the
time axis and equivariance helps in handling the
input changes which are carried forward in the
output (Goodfellow, Bengio and Courville, 2016).
Figure. 3 gives a high-level architecture of the
proposed methodology. The network takes the
normalised input time series (described above) as
input and model outputs a mortality risk score.
Processing Block: A Processing Block comprises of
a convolution layer, activation function and a
dropout layer.
Convolution Layer: The convolution layers have
equal filter sizes with variable kernel sizes and
strides (Equation 4). Convolution is done only along
the time dimension of the input vectors giving us a
1-D CNN. The convolution layer input is padded to
keep the output the same size as the input.
(4)
In (Equation 4) Z (output) is of the same format as V
(input) and each value is addressed within row j and
and channel i. K gives the connection strength
between Z and V. s is the stride which can down
sample by skipping over some positions to reduce
computational cost (Goodfellow, Bengio and
Courville, 2016).
Activation Layer: In the current architecture, the
Rectified Linear Unit (ReLU) function (Equation 5)
is used to transform the feature map non-linearly. It
calculates:
(5)
ReLU have been found to greatly accelerate the
convergence of stochastic gradient descent
compared to the sigmoid or tanh functions
(Krizhevsky, Sutskever and Hinton, 2012b). We
apply ReLU in conjunction with the convolution
layer.
HEALTHINF 2018 - 11th International Conference on Health Informatics
466

Dropout Layer: To reduce overfitting, we employ a
dropout layer in the processing block. Dropout
(Srivastava et al., 2014) is a technique where we
ignore randomly selected neurons from a layer
during training. Essentially their (dropped out
neurons) contributions to the activation of neurons
downstream are removed during the forward pass
and weight updates are not applied during the
backward pass. This results in network which can
generalize better. After calculating feature maps
over multiple processing blocks, the feature map is
flattened to connect it to a fully connected layer with
a SoftMax activation function
(Equation 7).
This lets us calculate the probability of patient
mortality. We optimise the cross-entropy objective
function (Li) for a single example in the training set
(Equation 6).
(6)
Where,
(7)
In our proposed architecture, we have actively
avoided pooling layers in the processing blocks
(Figure 3). One of the main reason for us to avoid
pooling layer is the low sampling rate of the given
physiological data. Pooling layers would abstract
away from the nuance changes which are needed to
distinguish between various effects in training the
classifier effectively.
Table 1: The hyperparameters used in each architecture.
These hyperparameters were tuned by hand by trying
many architectures and selecting the best one for each type
of model.
Model
Layers
# Hidden Units
CNN
4 convolution
128
RNN
2 LSTM
64
MLP
4 dense
128
Figure 3: The architecture of the network. Overall it
contains 4 layers followed by fully connected layer and
SoftMax.
3 RESULTS
We compare the one-dimensional CNN model with
two other deep learning models: A multilayer
perceptron (MLP) model, and a recurrent Long
Short-Term Memory (RNN) model (Hochreiter S.
Schmidhuber J., 1997). The hyperparameters used
are shown in Table 1. As figure [4] shows, the CNN
outperforms both models at most points in time. For
some cases around hour 20, 25, and 41, the RNN
model outperforms the CNN. We achieve an
accuracy of 0.76 with the CNN model predicting
based off 47 hours of data, compared to an accuracy
of 0.71 with the MLP model and 0.72 with the RNN
model. As the Figure shows, these results are
somewhat sporadic—in some cases one model
performs better than another. In general, the CNN is
the most successful.
x 4
Real Time Mortality Risk Prediction: A Convolutional Neural Network Approach
467

Figure 4: Accuracy comparison of various models over
time (hours).
We also include a comparison with a Logistic
Regression(LR) model using features selected by
hand, specifically the maximum, minimum, mean,
and standard deviation of each vital sign. The LR
model is successful in predicting based on only a
few hours of data, but LR fails to make sense of
increasing data effectively, leading to an average
accuracy of 0.61 and a peak accuracy of 0.69. This
makes sense, as LR has no way of working with
time as a dimension, but the deep learning methods
can incorporate temporal position in their models
effectively.
Figure 5: ROC comparing deep learning models.
Figure [5] shows the Receiver Operating
Characteristic (ROC) curve (Hanley J McNeil B,
1982) of the three deep learning models. We used
the entire set of results from all hours for this figure.
The CNN model has the highest Area Under the
Curve (AUC), with 0.72. The RNN Model has an
only slightly lower AUC at 0.70, followed by the
MLP model with an AUC of 0.67.
Figure 6: ROC comparing the CNN model using different
time frames of data as input.
Figure [6] shows the ROC curve using different
amounts of data in the CNN model. The blue curve
uses only six hours of data, and achieves a meagre
AUC of 0.65. As more hours of data are used, the
CNN model’s accuracy clearly improves, until with
47 hours of data the CNN model achieves an AUC
of 0.87.
Table 2: The Area under receiver operating characteristic,
mortality class precision, and mortality class recall for
each model when using 47 hours of data. The largest
number in each column is bolded.
Model
AUC
Precision
Recall
CNN
0.87
0.7443
0.8188
RNN
0.80
0.6940
0.7987
MLP
0.84
0.8091
0.5597
Logistic
Regression
0.79
0.8069
0.5138
4 CONCLUSIONS
We find 1-dimensional CNNs to be a promising
model for predicting mortalities using variable
length vital signs data. Using this model, we can
assess patient risk each hour using minimal
equipment, as only low-frequency vital signs are
needed, and have patient risk scores that update
automatically over time. The CNN can predict with
60.3% accuracy after 12 hours of data collection,
and 76.3% after 47 hours of data collection, and on
average outperforms both an RNN model and a
MLP model. A system like this could be helpful in
0,5
0,55
0,6
0,65
0,7
0,75
0,8
1 4 7 10 13 16 19 22 25 28 31 34 37 40 43 46
Prediction Accuracy Over Time
LR
CNN
MLP
RNN
HEALTHINF 2018 - 11th International Conference on Health Informatics
468

non-critical care settings, where patients may quietly
deteriorate.
5 FUTURE WORK
Though this system currently has narrowly limited
usefulness, because patients in non-critical care
settings rarely pass away, in future work we intend
to assemble a suite of risk assessment tools for
patients in non-critical care settings based on the
data that is unique to that setting. In the case that a
patient in a non-critical care setting has a high
predicted probability of mortality, this is a highly
preventable death, and hospitals should be aware of
the patient's condition and act accordingly. In the
future, we would like to experiment with higher
frequency sample data, to understand its impact on
the results.
We also want to experiment with Deconvolution
networks to understand the behaviour of various
layers activations (Zeiler et al., 2010).
Deconvolution networks typically consists of un-
pooling and transposed convolution layers, the
maximum activation of feature maps from each layer
is passed through the earlier layers to reconstruct the
inputs. This reconstructed input can give us an
inkling on the patterns which can lead to mortality.
It would be interesting to understand the activation
patterns for patients with different conditions(Wang
et al., 2016). This can lead to building diagnostic
tools which can be implemented on the monitoring
devices to classify conditions of patient deterioration
in real time.
REFERENCES
Adebiyi, A. A., Adewumi, A. O. and Ayo, C. K. (2014)
‘Comparison of ARIMA and Artificial Neural
Networks Models for Stock Price Prediction’, Journal
of Applied Mathematics. Hindawi, 2014, pp. 1–7. doi:
10.1155/2014/614342.
Clermont, G. et al. (2001) ‘Predicting hospital mortality
for patients in the intensive care unit: a comparison of
artificial neural networks with logistic regression
models.’, Critical care medicine, 29(2), pp. 291–6.
Available at:
http://www.ncbi.nlm.nih.gov/pubmed/11246308
(Accessed: 31 August 2017).
Dudoit, S. and van der Laan, M. J. (2005) ‘Asymptotics of
cross-validated risk estimation in estimator selection
and performance assessment’, Statistical
Methodology, 2(2), pp. 131–154. doi:
10.1016/j.stamet.2005.02.003.
Dybowski, R. et al. (1996) ‘Prediction of outcome in
critically ill patients using artificial neural network
synthesised by genetic algorithm.’, Lancet (London,
England). Elsevier, 347(9009), pp. 1146–50. doi:
10.5555/URI:PII:S0140673696906091.
Foltran, F. et al. (2010) ‘Using VLAD scores to have a
look insight ICU performance: towards a modelling of
the errors’, Journal of Evaluation in Clinical Practice,
16(5), pp. 968–975. doi: 10.1111/j.1365-
2753.2009.01240.x.
Le Gall, J. R. et al. (1984) ‘A simplified acute physiology
score for ICU patients.’, Critical care medicine,
12(11), pp. 975–7. Available at:
http://www.ncbi.nlm.nih.gov/pubmed/6499483
(Accessed: 31 August 2017).
Le Gall, J. R., Lemeshow, S. and Saulnier, F. (no date) ‘A
new Simplified Acute Physiology Score (SAPS II)
based on a European/North American multicenter
study.’, JAMA, 270(24), pp. 2957–63. Available at:
http://www.ncbi.nlm.nih.gov/pubmed/8254858
(Accessed: 31 August 2017).
Ganzert, S. et al. (no date) ‘Analysis of respiratory
pressure-volume curves in intensive care medicine
using inductive machine learning.’, Artificial
intelligence in medicine, 26(1–2), pp. 69–86.
Available at:
http://www.ncbi.nlm.nih.gov/pubmed/12234718
(Accessed: 31 August 2017).
Goodfellow, I., Bengio, Y. and Courville, A. (2016) Deep
Learning. MIT Press. Available at:
http://www.deeplearningbook.org/ (Accessed: 1
September 2017).
Guoqiang Zhang, B.Eddy Patuwo and MichaelY. Hu
(1998) ‘Forecasting with artificial neural networks::
The state of the art’, International Journal of
Forecasting. Elsevier, 14(1), pp. 35–62. doi:
10.1016/S0169-2070(97)00044-7.
HITECH Act Enforcement Interim Final Rule | HHS.gov
(no date). Available at: https://www.hhs.gov/hipaa/for-
professionals/special-topics/HITECH-act-
enforcement-interim-final-rule/index.html (Accessed:
26 October 2017).
Kim, S., Kim, W. and Park, R. W. (2011) ‘A Comparison
of Intensive Care Unit Mortality Prediction Models
through the Use of Data Mining Techniques.’,
Healthcare informatics research. Korean Society of
Medical Informatics, 17(4), pp. 232–43. doi:
10.4258/hir.2011.17.4.232.
Knaus, W. A. et al. (1981) ‘APACHE-acute physiology
and chronic health evaluation: a physiologically based
classification system.’, Critical care medicine, 9(8),
pp. 591–7. Available at:
http://www.ncbi.nlm.nih.gov/pubmed/7261642
(Accessed: 31 August 2017).
Knaus, W. A. et al. (1985) ‘APACHE II: a severity of
disease classification system.’, Critical care medicine,
13(10), pp. 818–29. Available at:
Real Time Mortality Risk Prediction: A Convolutional Neural Network Approach
469

http://www.ncbi.nlm.nih.gov/pubmed/3928249
(Accessed: 29 August 2017).
Kong, L., Milbrandt, E. B. and Weissfeld, L. A. (2004)
‘Advances in statistical methodology and their
application in critical care.’, Current opinion in critical
care. Current opinion in critical care, 10(5), pp. 391–4.
Available at:
http://www.ncbi.nlm.nih.gov/pubmed/15385757
(Accessed: 31 August 2017).
Kreke, J. E., Schaefer, A. J. and Roberts, M. S. (2004)
‘Simulation and critical care modeling.’, Current
opinion in critical care, 10(5), pp. 395–8. Available at:
http://www.ncbi.nlm.nih.gov/pubmed/15385758
(Accessed: 31 August 2017).
Krizhevsky, A., Sutskever, I. and Hinton, G. E. (2012a)
‘ImageNet Classification with Deep Convolutional
Neural Networks’, pp. 1097–1105. Available at:
https://papers.nips.cc/paper/4824-imagenet-
classification-with-deep-convolutional-neural-
networks (Accessed: 29 August 2017).
Krizhevsky, A., Sutskever, I. and Hinton, G. E. (2012b)
‘ImageNet Classification with Deep Convolutional
Neural Networks’, pp. 1097–1105. Available at:
http://papers.nips.cc/paper/4824-imagenet-
classification-with-deep-convolutional-neural-
networks (Accessed: 31 August 2017).
Lecun, Y. et al. (1998) ‘Gradient-based learning applied to
document recognition’, Proceedings of the IEEE,
86(11), pp. 2278–2324. doi: 10.1109/5.726791.
LeCun, Y. et al. (1989) ‘Backpropagation Applied to
Handwritten Zip Code Recognition’, Neural
Computation, 1(4), pp. 541–551. doi:
10.1162/neco.1989.1.4.541.
Lucas, P. (2004) ‘Bayesian analysis, pattern analysis, and
data mining in health care.’, Current opinion in critical
care, 10(5), pp. 399–403. Available at:
http://www.ncbi.nlm.nih.gov/pubmed/15385759
(Accessed: 31 August 2017).
McGain, F. et al. (2008) ‘Documentation of clinical
review and vital signs after major surgery’, Med J
Aust. Available at:
https://www.mja.com.au/system/files/issues/189_07_0
61008/mcg11494_fm.pdf (Accessed: 28 July 2017).
Morik, K. et al. (2000) ‘Knowledge discovery and
knowledge validation in intensive care.’, Artificial
intelligence in medicine, 19(3), pp. 225–49. Available
at: http://www.ncbi.nlm.nih.gov/pubmed/10906614
(Accessed: 31 August 2017).
Moser, S., Jones, W. T. and Brossette, S. E. (1999)
‘Application of Data Mining to Intensive Care Unit
Microbiologic Data’, Emerging Infectious Diseases,
5(3), pp. 454–457. doi: 10.3201/eid0503.990320.
Nassar, A. P. et al. (2012) ‘Caution when using prognostic
models: A prospective comparison of 3 recent
prognostic models’, Journal of Critical Care, 27(4), p.
423.e1-423.e7. doi: 10.1016/j.jcrc.2011.08.016.
Patel, S. et al. (2012) ‘A review of wearable sensors and
systems with application in rehabilitation’, Journal of
NeuroEngineering and Rehabilitation. BioMed
Central, 9(1), p. 21. doi: 10.1186/1743-0003-9-21.
Pirracchio, R. (2016) ‘Mortality Prediction in the ICU
Based on MIMIC-II Results from the Super ICU
Learner Algorithm (SICULA) Project’, in Secondary
Analysis of Electronic Health Records. Cham:
Springer International Publishing, pp. 295–313. doi:
10.1007/978-3-319-43742-2_20.
Poole, D. et al. (2012) ‘Comparison between SAPS II and
SAPS 3 in predicting hospital mortality in a cohort of
103 Italian ICUs. Is new always better?’, Intensive
Care Medicine, 38(8), pp. 1280–1288. doi:
10.1007/s00134-012-2578-0.
Rajpurkar, P. et al. (2017) ‘Cardiologist-Level Arrhythmia
Detection with Convolutional Neural Networks’.
Available at: http://arxiv.org/abs/1707.01836.
Ribas, V. J. et al. (2011) ‘Severe sepsis mortality
prediction with relevance vector machines’, in 2011
Annual International Conference of the IEEE
Engineering in Medicine and Biology Society. IEEE,
pp. 100–103. doi: 10.1109/IEMBS.2011.6089906.
Sierra, B. et al. (2001) ‘Using Bayesian networks in the
construction of a bi-level multi-classifier. A case study
using intensive care unit patients data’, Artificial
Intelligence in Medicine, 22(3), pp. 233–248. doi:
10.1016/S0933-3657(00)00111-1.
Srivastava, N. et al. (no date) ‘Dropout: A simple way to
prevent neural networks from overfitting’, The Journal
of Machine Learning Research. Available at:
http://citeseerx.ist.psu.edu/viewdoc/citations;jsessionid
=62C00367CD502B74905266851BF65145?doi=10.1.
1.696.4855 (Accessed: 29 August 2017).
Suresh, H. et al. (no date) ‘Clinical Intervention Prediction
and Understanding using Deep Networks’, pp. 1–16.
Available at: https://arxiv.org/pdf/1705.08498.pdf.
Wang, Z. et al. (2016) ‘Representation Learning with
Deconvolution for Multivariate Time Series
Classification and Visualization’. Available at:
http://arxiv.org/abs/1610.07258 (Accessed: 31 August
2017).
Yoon, J. et al. (2016) ‘ForecastICU: A Prognostic
Decision Support System for Timely Prediction of
Intensive Care Unit Admission’, Proceedings of The
33rd International Conference on Machine Learning,
48, pp. 1680–1689. Available at:
http://proceedings.mlr.press/v48/yoon16.html.
Zeiler, M. D. et al. (2010) ‘Deconvolutional networks’, in
2010 IEEE Computer Society Conference on
Computer Vision and Pattern Recognition. IEEE, pp.
2528–2535. doi: 10.1109/CVPR.2010.5539957.
HEALTHINF 2018 - 11th International Conference on Health Informatics
470
