
Evaluation of Closed-loop Feedback System Delay
A Time-critical Perspective for Neurofeedback Training
Jonatan Tidare, Elaine
˚
Astrand and Martin Ekstr
¨
om
School of Innovation, Design and Engineering, M
¨
alardalen University, V
¨
aster
˚
as, Sweden
Keywords:
EEG, Closed-loop, LabVIEW, System Latency.
Abstract:
Neurofeedback in real-time has proven effective when subjects learn to control a BCI. To facilitate learning, a
closed-loop feedback system should provide neurofeedback with maximal accuracy and minimal delay. In this
article, we propose a modular system for real-time neurofeedback experiments and evaluate its performance
as a function of increased stress level applied to the system. The system shows stable behavior and decent
performance when streaming with many EEG channels (36-72) and 500-5000 Hz, which is common in BCI
setups. With very low data loads (1 channel, 500-1000 Hz) the performance dropped significantly and the
system became highly unpredictable. We show that the system delays did not correlate linearly with the
stress-level applied to the system, emphasizing the importance of system delay tests before conducting real-
time BCI-experiments.
1 INTRODUCTION
Brain-Computer Interface (BCI) technology using
signals from ElectroEncephaloGram (EEG) has emer-
ged in research towards both assistive and rehabilita-
tive technology to alleviate many neurological disor-
ders caused by for example a stroke (Silvoni et al.,
2011). After a stroke, the patient may be unable to
move certain parts of the body, making physical reha-
bilitation impossible. As mental rehearsal of physical
movements has been reported to enhance physical re-
covery in these patients, a system that is able to ex-
tract Mental Imagery (MI) and project the measure as
real-time feedback so that the patient can train MI,
holds great promise for promoting cortical reorgani-
zation and enhancing rehabilitation after stroke (Ruf-
fino et al., 2017; Ang and Guan, 2017).
A common setup in such research experiments in-
volves the patient sitting in front of a computer screen,
on which instructions as to how and when to per-
form MI is presented visually and/or verbally. Ba-
sed on recorded signals, feedback can be provided
visually, through an assistive robot (e.g. Ang et al.,
2015) and/or with Functional Electrical Stimulation
(FES; Daly et al., 2009; Mohanty et al., 2017). The
patient is instructed to use the feedback in order to
upregulate the information-content of interest (e.g.
MI) and hence promote mechanisms of neuroplasti-
city that is thought to lead to enhanced physical reha-
bilitation (Ang et al., 2010).
To maximize cortical plasticity, it is crucial that
the system for acquiring and processing physiologi-
cal signals and projecting feedback produces maximal
accuracy as well as minimal ”closed-loop delay” bet-
ween the time of brain activation and that of the pro-
jected visual or tactile feedback (Gomez-Rodriguez
et al., 2011). Specifically, such a delay is caused by
several components of a system including stimulation
software (delays for sending stimulation), online stre-
aming protocols, signal processing and the temporal
processing window length. As for the temporal pro-
cessing window, there is a trade-off between the ex-
traction accuracy, which is often shown to increase
with longer temporal windows (Darvishi et al., 2013),
and the ability of the patient to control the feedback,
as delays longer than 250ms have been shown to sig-
nificantly reduce the ability of the user to control a
robot (Kim et al., 2005). In most BCI studies using
oscillatory EEG signals, as the length of this time
window is most certainly longer than 250ms, using
overlapping temporal windows at a higher frequency
might be a useful strategy to decrease the delay. Ho-
wever, this strategy will limit the influence that the
most recent data will have on the real-time feedback.
To our knowledge, evaluating the closed-loop sy-
stem delay caused by the stimulation software and the
streaming protocol has not been done in BCI research.
Reports may indicate the frequency at which feedback
Tidare, J., Åstrand, E. and Ekström, M.
Evaluation of Closed-loop Feedback System Delay - A Time-critical Perspective for Neurofeedback Training.
DOI: 10.5220/0006598301870193
In Proceedings of the 11th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2018) - Volume 1: BIODEVICES, pages 187-193
ISBN: 978-989-758-277-6
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
187

is presented and the hardware or software that was
used, but the actual system delay is often not menti-
oned. All systems are bound to have a delay but mi-
nimizing it holds strong promise in increasing the ef-
fects of neurofeedback training. Moreover, reporting
the system delay will allow for a better interpretation
of the training effects with respect to other studies.
This study focuses on the closed-loop system de-
lay caused by both the stimulation software and the
streaming protocol as compared to only the streaming
protocol. These system delays are evaluated under
different stress-levels in order to characterize their
performance. An increasingly popular game-engine
was chosen as the stimulation software to test its usa-
bility in BCI research. EEG data was streamed in real
time to an external software for aligning and signal
processing.
Figure 1: Overview of the future experimental setup. A
subject is placed in front of a computer screen. EEG data
is recorded simultaneously as the subject is performing a
computer task. EEG data is continuously streamed in real
time to LabVIEW for signal processing. Feedback from the
recorded EEG data (visual and/or tactile) is then provided
back to the subject.
2 METHOD
The ”Real-time Neurofeedback Brain-computer inter-
face” (RNB) is composed of the following elements:
a computer screen, a photodiode that is connected to
the screen, Unity game engine (version 4.6), EEG
acquisition device, and a LabVIEW client. The idea
for future experiments is that EEG signals will be re-
corded from test-subjects while they are engaged in a
computer task (run by Unity). Data will be streamed
continuously to LabVIEW for alignment, signal pro-
cessing and analysis in order to determine and send
feedback to be visualized on the computer screen (i.e.
closed-loop system). A general overview of the future
experimental setup can be visualized in Figure 1.
Figure 2: System overview. The RNB comprises 2 com-
puters: computer 1 on which the game engine (yellow)
and LabVIEW (light grey area) are running, and compu-
ter 2 on which the EEG acquisition software (green) is run-
ning. The game engine communicates with the EEG device
through the triggerbox and with LabVIEW through a speci-
fic LabVIEW client. The EEG device communicates with
the computer screen through a photodiode and with Lab-
VIEW through a specific LabVIEW client. LabVIEW con-
tains threads for logging, data signal processing and inter-
software communication (clients)).
2.1 Hardware
Computer 1 has Windows 7, 64-bit, service pack 1
with an Intel Core i7-6800K 3.40 GHz and 32 GB
RAM. As this is the most powerful computer, we had
the Unity game engine and LabVIEW running on it
(Figure 2). Computer 2 has Windows 7, 64-bit, ser-
vice pack 1 with and Intel(R) Xeon(R) E5620 2.40
GHz. Only the EEG software was running on com-
puter 2 (Figure 2). Both computers were running on
Windows 7 with a computer screen refresh rate at 60
Hz.
2.2 Unity Computer Task
For simplicity in measuring the closed-loop system
delay, a grey square was used in the computer task as
a start- and stop-event of the closed loop. The task
started by the presentation of a grey square in the up-
per right corner of the screen. As soon as the Signal
Processing thread in LabVIEW (Figure 2) detected
the event, a command was sent to Unity in order to
replace the grey square with a black square (simula-
ted feedback). No signal processing was performed in
order to measure the ”pure” delay of the closed-loop
system.
Unity communicates with the EEG acquisition de-
vice by two paths (Figure 2): 1) by sending a message
from the parallel port of computer 1 to the triggerbox,
which is an extension of the trigger input port of the
EEG acquisition device, or 2) by changing the lumi-
nosity of a set of pixels in the upper right corner of
the computer screen, on which a photodiode is con-
BIODEVICES 2018 - 11th International Conference on Biomedical Electronics and Devices
188
nected that is fully integrated with the EEG acquisi-
tion device (no issue of time synchronization). The
first communication path was used to send a general
identity of the visual stimulus that was presented on
the computer screen (i.e. task event) to be integrated
in the EEG-data. The digital port of the EEG acqui-
sition device requires trigger pulses according to TTL
specifications. This is a standard interface in EEG re-
search for trigger co-registration. The second com-
munication path provided an accurate timestamp of
when the task event occurred. Unity also communi-
cates directly with LabVIEW by sending a specific
identity of the task event.
2.3 EEG Acquisition
The EEG equipment consists of 64 Ag/AgCl active
electrodes (ActiCHamp, Brain Products), a photo-
diode (Brain Products) connected to the auxiliary
(AUX) port of the amplifier, an additional of 7 AUX
ports for recording EMG, and a triggerbox that ena-
bles input markers from different sources to the EEG
with high temporal precision (< 1 ms, (Triggerbox,
Brain Products)). The open source software PyCor-
der, was used to acquire the EEG signals and the Py-
Corder RDA-client streamed data and markers to Lab-
VIEW. Different channel configurations and sampling
rates are available in the PyCorder software and we
used 1, 36 or 72 active channels each with different
sampling rates: 500 Hz, 1 kHz, 5 kHz, 10 kHz, 25
kHz, 50 kHz and 100 kHz. However, due to technical
limitations in the EEG acquisition device 72 channels
was used with only up to 50kHz sampling rate.
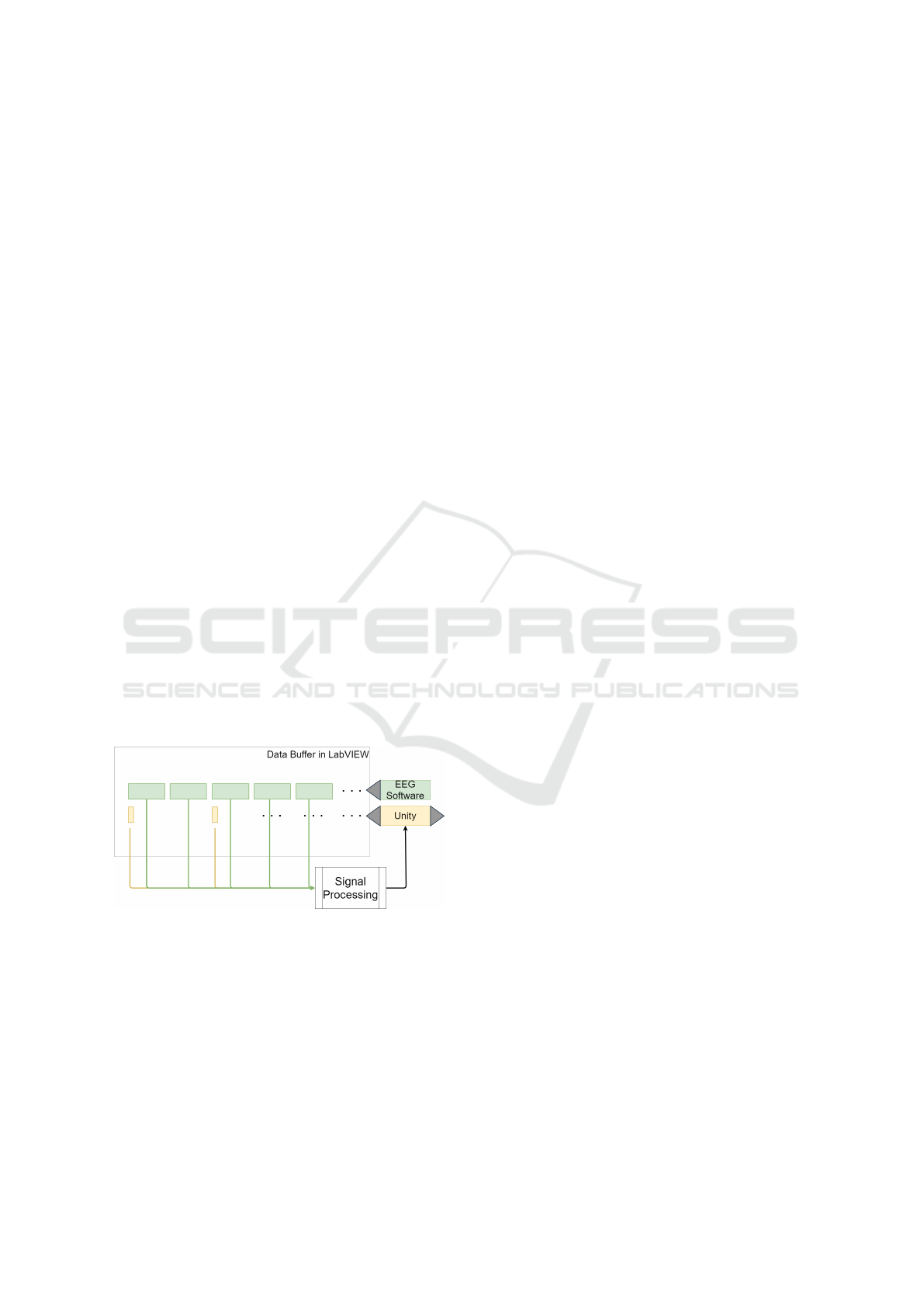
Figure 3: Streaming protocols. EEG data is streamed from
the EEG software to LabVIEW in buffer times of 20 or 50
ms. The game engine streams events directly to LabVIEW.
Data is immediately sent to the signal processing thread in
LabVIEW and feedback is sent back to the game engine.
2.4 Data Streaming Protocol
The RDA-client integrated in PyCorder uses TCP/IP
as a communication protocol to stream EEG-data and
event markers from the PyCorder to an external soft-
ware (i.e. LabVIEW client, figure 2). The PyCorder
program was set to buffer data during either 20ms or
50 ms before sending it to the RDA-client, leading to
an additional varying stream-latency of up to 20 or 50
ms (here referred to ”EEG packet wait time”, figure
3). Unity uses JSON as a communication protocol to
send task event data to the LabVIEW client (Figure
3).
2.5 LabVIEW
The signal-processing program is built in LabVIEW
and has 3 threads: 1 thread for data logging and real
time signal processing of the data, and 2 threads (na-
med ”clients”, Figure 2) for inter-software commu-
nication with the Unity game engine and the EEG
software. The Signal Processing thread performs no
signal processing in these tests, except for detecting
the grey square in the photosensor data (AUX). The
client between the Signal Processing thread and the
EEG software only forwards stream data to the Sig-
nal Processing thread. The Client between the Signal
Processing thread and Unity forwards the two com-
munication paths (parallel port or visual stimulus) to
Unity and can send event identities back to the Signal
Processing thread from Unity.
2.6 Closed-loop System Delay
The closed-loop system delay including only the stre-
aming protocol will be referred to as the ”pure closed-
loop system delay” (Figure 2). This system delay was
measured without taking EEG packet wait time into
consideration (Figure 4) therefore reflecting mainly
system delays caused by data streaming. The pure
closed-loop system delay was calculated by measu-
ring the time between two consecutive task events
(start and stop, see section on Unity computer task) as
detected from EEG-data trigger markers in LabVIEW
and subtracting EEG data packet wait time.
The closed-loop system delay including both the
stimulation software (i.e. Unity game engine) and
the streaming protocol will be referred to as the ”full
closed-loop system delay” (Figure 2). This system
delay is measured as the time between two conse-
cutive task events as detected from the photodiode
data in LabVIEW (Figure 2). In this measurement,
the EEG data packet wait time was included in or-
der to assess the full closed-loop system delay similar
to a real-time experiment. A total of 50 repetitions
were made for each closed-loop system delay measu-
rement.
Evaluation of Closed-loop Feedback System Delay - A Time-critical Perspective for Neurofeedback Training
189
3 RESULTS
In order to characterize the use of Unity as a visual
stimulation software in BCI research, the delay bet-
ween the time of the task event trigger marker in the
EEG-data and the actual time of presentation on the
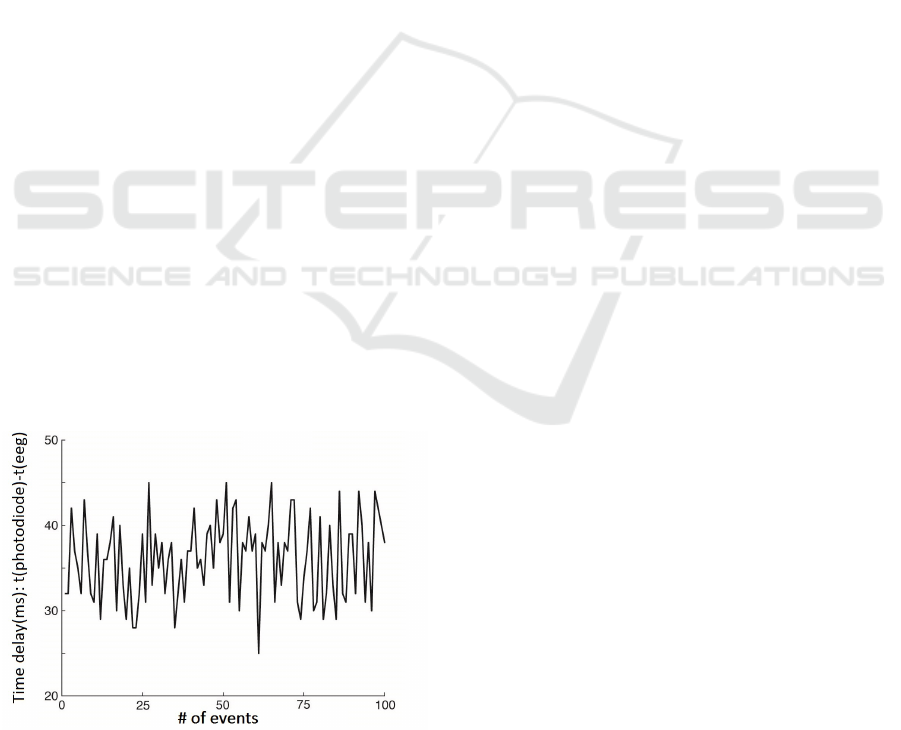
screen was measured. We observed a median delay
across repetitions (n=100) of 36ms with an associated
median absolute deviation of 4.8ms (Figure 4).
To further investigate the RNB without taking the
visual stimulation software into consideration, the
pure closed-loop system delay was measured (Figure
5A, 6A) using a PyCorder buffer size of 50ms. Se-
veral different channel and sampling rate configura-
tions was used in order to create different degree of
stress to the RNB. The lowest system delay was found
when streaming with either low sampling rates (500
Hz, 1kHz, 5kHz) using high number of channels (36
or 72) or high sampling rate (10kHz, 25kHz, 50kHz,
100kHz) using only one channel (Figure 5A). In these
cases, the median pure closed-loop system delay was
below 25 ms and the maximum pure closed-loop sy-
stem delay was below 30 ms (Figure 5A, 6A, 36 and
72 channels, 500Hz, 1kHz, and 5kHz: median 20.0
ms, 1 channel, 10kHz, 25kHz, 50kHz, and 100kHz:
median 21.7 ms). Using 36 or 72 channels, the me-
dian system delay increases significantly when the
sampling rate increases from 25kHz to 100 kHz for
36 channels and 10kHz to 50kHz for 72 channels (Fi-
gure 5A, 36 channels: 30.6 ms, p<0.001; 72 chan-
nels: 26.9 ms, p<0.001, Wilcoxon test).
The system delay is 51.3 ms longer at low sam-
pling rates when streaming with only one channel
(1kHz: 71.5 ms, 10kHz: 20.2 ms; p<0.001, Wilcoxon
test) and the maximum system delay is drastically
increased (Figure 6A, 1kHz: 220.0156ms, 10kHz:
Figure 4: Visual presentation delay. The delay between the
timestamp of the EEG input trigger (the game engine sends
a trigger to the EEG via a parallel port) and the presenta-
tion of a visual stimulus on the screen, as detected by the
photodiode, is shown for all measurements (n=100).
22.4019ms). By increasing the sampling rate for one
channel to 10 kHz or 25 kHz the median delay decre-
ases to below 25 ms with a slight increase for 25kHz
sampling rate.
The full closed-loop system delay was evaluated
with identical channels, sampling rate, and buffer size
configurations as for the pure closed-loop system de-
lay in order to enable a fair comparison when also
taking the stimulation software, the time for presen-
ting a visual task event on the computer screen, and
EEG packet wait time into account (Figure 5B, 6B).
Streaming with 36 and 72 channels produces similar
system delays for each sampling rate (Figure 5A, 36
channels: median = 101.5 ms, 72 channels: median =
102.0 ms. p>0.05, Wilcoxon test). A minimum sy-
stem delay of 90ms is measured at best (36 channels
and 5 kHz sampling rate) and the maximum system
delay reaches 131ms (36 channels and 100 kHz sam-
pling rate).
Using 36 channels, the median system delay in-
creases significantly when the sampling rate increa-
ses from 25kHz to 100kHz (Figure 5B, increase: me-
dian 39.0 ms, p<0.001, Wilcoxon test). As for the
pure closed-loop system delay (Figure 5A), streaming
with 1 channel leads to lower full closed-loop system
delays when the sampling rate increases, specifically
61.8 ms of difference from using 500Hz to 10kHz
sampling rate (Figure 5B). A worst-case system de-
lay is measured at 294.0 ms (Figure 6B, 1 channel
and 500Hz sampling rate).
Using 36 channels and a sampling rate of 1kHz
(a common setup in BCI research), the system delay
increases by an average of 74.0 ms when the visual
stimulation software, the time for presenting a visual
task event on the computer screen, and the EEG pac-
ket wait time is taken into consideration (full closed-
loop system delay).
As an additional comparative evaluation, the Py-
Corder buffer size was decreased to 20ms and the full
closed-loop system delay using identical channel and
sampling rate configurations was measured (Figure
7). The full closed-loop system delay with 50 ms buf-
fer time was similar that of using 20 ms buffer time
when using 1 channel with 500Hz or 1kHz sampling
rate (Figure 7, p>0.05 for both sampling rates, Wil-
coxon test). The median difference becomes negative
when sampling rate increases (i.e. system delay with
20 ms buffer time is shorter than that of 50 ms buffer
time).
Using 36 and 72 channels, the system delay is
on average 18.0 ms shorter for sampling rates up to
50kHz when the buffer size is set to 20ms (Figure 7,
p<0.1, Wilcoxon test). A dramatic decrease of 258.0
ms (424.0 ms maximum delay) in the system delay
BIODEVICES 2018 - 11th International Conference on Biomedical Electronics and Devices
190

Pure Closed-Loop System Delay
(ms)
300
0
100
200
Sample Rate (Hz)
100000
0 500
1000 5000
10000 25000 50000
36 channels
1
channels
72 channels
36 channels
1
channels
72 channels
Full Closed-Loop System Delay (ms)
300
0
100
200
Sample Rate (Hz)
100000
0
500
1000 5000
10000 25000 50000
A) B)
Figure 5: (A) Pure closed-loop system delay. Median system delay with associated median absolute deviations across measu-
rements (n=50) are shown as a function of sampling rate (Hz) for streaming with 1 channel (black), 36 channels (green), and
72 channels (pink). (B) Full closed-loop system delay. Same as in (A).
Pure Closed-Loop System Delay
(ms)
300
100
200
0
Sample Rate (Hz)
100000
0 500
1000 5000
10000 25000 50000
Full Closed-Loop System Delay (ms)
300
0
100
200
Sample Rate (Hz)
100000
0 500
1000 5000
10000 25000 50000
36 channels
1
channel
72 channels
36 channels
1
channel
72 channels
A)
B)
Figure 6: (A) Maximum pure closed-loop system delays across measurements (n=50) are shown as a function of sampling
rate (Hz) for streaming with 1 channel (black), 36 channels (green), and 72 channels (pink). (B) Maximum full closed-loop
system delay. Same as in (A).
when the buffer size it set to 20 ms can be observed
for 36 channels using a sampling rate of 100kHz (Fi-
gure 7).
4 DISCUSSION
The RNB measures EEG data which is streamed in
real time to an external software for further proces-
sing. The use of an external software facilitates the fu-
sion of other physiological measurements. The RNB
includes a game engine in order to enable more dyna-
mic and real-world tasks and feedback.
The system delays and the implications of uncer-
tain and large system delays in BCI research are ra-
rely reported and discussed. We show that the system
delays, both pure- and full closed-loop system delay,
did not correlate in a linear fashion with the applied
stress-level. Specifically, for both system delays, stre-
aming data from only one channel with low sampling
rates below 5kHz, causes a substantial temporal lag
and uncertainty in the system delay (Figure 5A, 5B).
The poor performance of the RNB at this configura-
tion is surprising. By investigating the behavior of
the RNB more closely, system delays were observed
in discrete levels which was caused by the PyCorder
software that appears to buffer up to 4 data packets
Evaluation of Closed-loop Feedback System Delay - A Time-critical Perspective for Neurofeedback Training
191

before sending them to LabVIEW. This unexpected
behavior is highly undesired when presenting feed-
back in real time. Also in order to minimize system
load due to the streaming and processing of a large
amount of data, it is common to reduce the number
of EEG channels to only the ones that carry relevant
information. As this study shows, this procedure can
cause devastating consequences for the overall system
delay.
Streaming a moderate amount of EEG data, with
36 or 72 channels using a sampling rate of below 100
kHz, led to reduced system delays for the pure- and
full closed-loop with approximately 20 ms and 100
ms, respectively. The variability was also at its lowest
using these configurations. These results are promi-
sing because most BCI studies would probably be in-
cluded in this configuration. It is however important
to carry out system performance tests before a BCI
experiment in order to evaluate the system delay.
When a high stress-level was applied to the RNB,
(36 channels with samplingrate >25 kHz or 72 chan-
nels with samplingrate > 10 kHz), a moderate incre-
ase in the system delay could be observed for both the
pure- and the full closed-loop system delay. As the
increase in system delays occurs at a higher samplin-
grate using 36 channels as compared to streaming 72
channels, it seems like the system delay is influenced
by the total amount of data in a threshold-like man-
ner. These results combined show the general trend of
the system delays depending on the stress-level using
the RNB. Although the results presented in this study
36 channels
1
channels
72 channels
Full Closed-Loop System Delay (ms)
100
-100
-50
0
50
Sample Rate (Hz)
100000
0 500
1000 5000
10000 25000 50000
Figure 7: Effects on the full closed-loop system delay by
using a PyCorder buffer time of 20 ms. The full closed-
loop system delay using a buffer time of 50ms is subtracted
from the full closed-loop system delay using a buffer time
of 20ms. The median difference is shown with associated
median absolute deviations across measurements (n=50) as
a function of different sampling rates (Hz) for streaming
with 1 channel (black), 36 channels (green), and 72 chan-
nels (pink).
are specific to the RNB system used here, it emphasi-
zed the vulnerability of a system that depends on the
amount of data that is streamed. It calls for immediate
attention concerning the time delay in a system and
encourages researchers to evaluate their system delay.
For future research, it will be important to investigate
the impact of delayed feedback on learning.
When comparing the pure and full closed-loop sy-
stem delays, similar delays can be observed for each
system delay relative its different configurations (Fi-
gure 5A, 5B). However, an offset of approximately
80ms distinguishes the two system delays. This off-
set is partly due to a delay between Unity and vi-
sual screen presentation (Figure 4) which depends on
several factors including Unity, OS-scheduling and
screen resolution. However, the offset is also due to
the RDA-client buffer time in the PyCorder software
which was initially set to its default value of 50 ms.
Using this default PyCorder buffer time configuration
has resulted in a variable streaming delay of 50- 100
ms through the EEG signal pipeline (hardware filters
- a/d converters - USB communication - windows OS
- RDA server - Ethernet Connection (TCP/IP) - RDA
Client) (BrainProducts, 2015). Reducing the buffer
time to 20 ms decreased the full closed-loop system
delay with approximately 10-20 ms. Theoretically, it
is possible to further reduce the buffer time but practi-
cally, as this requires a very powerful computer with
reduced cycles of scheduling, it was not a viable op-
tion for our system. Replacing the RDA client with
a Software Development Kit (SDK) to directly access
the ActiCHamp hardware, the system delay can be
significantly reduced (BrainProducts, 2015).
An important issue in BCI research is how the
temporal delay of neurofeedback influences the abi-
lity of subjects to understand and extract relevant in-
formation from the feedback. In a typical neurofeed-
back experiment, subjects receive discrete or continu-
ous feedback based on recorded brain signals (Figure
1). One behaviorist theory in reinforcement learning
states that feedback must be given immediately in or-
der to reinforce correct behavior (e.g. Skinner, 1954).
In line with this theory, previous human studies have
demonstrated a clear behavioral benefit for having im-
mediate feedback as compared to temporally delayed
feedback (Lieberman et al., 2008; Opitz et al., 2011).
The behavioral gain is particularly important when
there is no prior knowledge of correct behavior (Lie-
berman et al., 2008) which is typically the case in
neurofeedback training. Specifically, Lieberman and
colleagues show that in a motor learning task during
which participants had minimal information on which
movement was correct, immediate feedback was re-
quired for the participants to learn (Lieberman et al.,
BIODEVICES 2018 - 11th International Conference on Biomedical Electronics and Devices
192

2008). In addition, they observed that the effect of the
temporal delay of feedback depended on the amount
of information that had to be held in working memory
(Lieberman et al., 2008). Despite these observations
pointing towards the importance of minimizing the
temporal delay between brain-activation (and recor-
ding) and projection of feedback, few studies using
neurofeedback address this issue. The present study
demonstrates a highly variable closed-loop system de-
lay depending on the system configuration. These re-
sults show the importance of measuring and reporting
the system delay in order to correctly interpret the be-
havioral effects of neurofeedback training.
5 CONCLUSION
This study shows the importance of testing the system
delay with the final experimental setup before con-
ducting a real-time BCI experiment. We specifically
observe the lowest system delays when streaming a
moderate amount of data through the RNB. A small
amount of data may cause substantially larger system
delays due to inbuilt data aggregation of the software.
REFERENCES
Ang, K. K., Chua, K. S. G., Phua, K. S., Wang, C.,
Chin, Z. Y., Kuah, C. W. K., Low, W., and Guan, C.
(2015). A randomized controlled trial of eeg-based
motor imagery brain-computer interface robotic reha-
bilitation for stroke. Clinical EEG and neuroscience,
46(4):310–320.
Ang, K. K. and Guan, C. (2017). Eeg-based strategies to
detect motor imagery for control and rehabilitation.
IEEE Transactions on Neural Systems and Rehabili-
tation Engineering, 25(4):392–401.
Ang, K. K., Guan, C., Chua, K. S. G., Ang, B. T., Kuah,
C., Wang, C., Phua, K. S., Chin, Z. Y., and Zhang, H.
(2010). Clinical study of neurorehabilitation in stroke
using eeg-based motor imagery brain-computer inter-
face with robotic feedback. In Engineering in Medi-
cine and Biology Society (EMBC), 2010 Annual Inter-
national Conference of the IEEE, pages 5549–5552.
IEEE.
BrainProducts (2015). Getting eeg data in real-time for
bci, neurofeedback and more. [online] Available
at: http://pressrelease.brainproducts.com/real-time-
eeg/ [Accessed 4 sep. 2017].
Daly, J. J., Cheng, R., Rogers, J., Litinas, K., Hrovat, K.,
and Dohring, M. (2009). Feasibility of a new applica-
tion of noninvasive brain computer interface (bci): a
case study of training for recovery of volitional motor
control after stroke. Journal of Neurologic Physical
Therapy, 33(4):203–211.
Darvishi, S., Ridding, M. C., Abbott, D., and Baumert, M.
(2013). Investigation of the trade-off between time
window length, classifier update rate and classifica-
tion accuracy for restorative brain-computer interfa-
ces. In Engineering in Medicine and Biology Society
(EMBC), 2013 35th Annual International Conference
of the IEEE, pages 1567–1570. IEEE.
Gomez-Rodriguez, M., Grosse-Wentrup, M., Hill, J., Gha-
rabaghi, A., Sch
¨
olkopf, B., and Peters, J. (2011). To-
wards brain-robot interfaces in stroke rehabilitation.
In Rehabilitation Robotics (ICORR), 2011 IEEE In-
ternational Conference on, pages 1–6. IEEE.
Kim, T., Zimmerman, P., Wade, M., and Weiss, C. (2005).
The effect of delayed visual feedback on telerobotic
surgery. Surgical Endoscopy and Other Interventional
Techniques, 19(5):683–686.
Lieberman, D. A., Vogel, A. C. M., and Nisbet, J. (2008).
Why do the effects of delaying reinforcement in ani-
mals and delaying feedback in humans differ? a
working-memory analysis. The Quarterly Journal of
Experimental Psychology, 61(2):194–202.
Mohanty, R., Sinha, A., Remsik, A., Allen, J., Nair, V.,
Caldera, K., Sattin, J., Edwards, D., Williams, J. C.,
and Prabhakaran, V. (2017). Machine learning-based
prediction of changes in behavioral outcomes using
functional connectivity and clinical measures in brain-
computer interface stroke rehabilitation. In Internatio-
nal Conference on Augmented Cognition, pages 543–
557. Springer.
Opitz, B., Ferdinand, N. K., and Mecklinger, A. (2011). Ti-
ming matters: the impact of immediate and delayed
feedback on artificial language learning. Frontiers in
human neuroscience, 5.
Ruffino, C., Papaxanthis, C., and Lebon, F. (2017). Neural
plasticity during motor learning with motor imagery
practice: Review and perspectives. Neuroscience,
341:61–78.
Silvoni, S., Ramos-Murguialday, A., Cavinato, M., Volpato,
C., Cisotto, G., Turolla, A., Piccione, F., and Birbau-
mer, N. (2011). Brain-computer interface in stroke: a
review of progress. Clinical EEG and Neuroscience,
42(4):245–252.
Skinner, B. F. (1954). The science of learning and the art of
teaching. Cambridge, Mass, USA, pages 99–113.
Evaluation of Closed-loop Feedback System Delay - A Time-critical Perspective for Neurofeedback Training
193
