
Unsupervised Temporal Segmentation of Skeletal Motion Data using
Joint Distance Representation
Christian Lins
1
, Sebastian M. Müller
2
, Max Pfingsthorn
2
, Marco Eichelberg
2
,
Alexander Gerka
2
and Andreas Hein
1
1
Carl von Ossietzky University, Ammerländer Heerstr. 140, Oldenburg, Germany
2
OFFIS - Institute for Information Technology, Escherweg 2, Oldenburg, Germany
Keywords:
Human Motion Analysis, Temporal Segmentation, Joint Distance Matrices, Musculoskeletal Disorders,
Ergonomics Assessment.
Abstract:
In this paper, we present an online method for the unsupervised segmentation of skeletal motion capture data for
the assessment of unfavorable or harmful postures in the context of musculoskeletal disorders. The long-time
motion capture data is segmented into short motion sequences using joint distances of the captured skeleton. We
use the difference between joint distance matrices to detect variances in motion dynamics in which the motion
is separated into either a dynamic motion or a static posture. Then, the static posture can be evaluated using
well-known posture assessment methods such as the Ovako Working postures Analysing System (OWAS) to
derive risk factors for musculoskeletal disorders. The algorithm works in real-time so that it can be incorporated
in live warning systems for unfavorable or harmful postures. We evaluated the segmentation algorithm by
comparing it with results from state-of-the-art offline motion segmentation algorithms as gold standard. Results
show that the algorithm approaches the performance of state-of-the-art offline segmentation algorithms.
1 INTRODUCTION
The analysis and classification of human motion have
been an active research topic for a long time in va-
rious disciplines (Wang et al., 2003; Aggarwal and
Cai, 1997). Applications include but are not limited
to media animation, biometrics, ergonomics, sports or
computer sciences. In the last years, motion capture
(MC or MoCap) systems, especially such with inertial
sensors (gyroscope, accelerometer, and magnetome-
ter, combined as IMU, short for Inertial Measurement
Unit), have become available to a greater audience.
Such systems, e.g. Xsens MVN (Roetenberg et al.,
2013) or SIRKA (Lins et al., 2015), make it possible
to capture the human motion continuously for hours
or even days. Additionally, such small and embed-
dable motion capture suits make occupational in-situ
observations possible (see Figure 1).
One application is the risk factor assessment
for work-related musculoskeletal disorders (WMSD)
(Wang et al., 2015). Industry workers regularly per-
form unfavorable, harmful or even dangerous postures
during their work shifts. These postures can – together
with other risk factors – lead to musculoskeletal disor-
ders (MSD) such as back pain. Besides the personal
Figure 1: Welder’s digitalized posture and reference footage.
inconveniences, MSDs are a primary cause for sick
leave and early retirement in physically demanding
occupations (Ellegast, 2013). According to (Punnett
and Wegman, 2004), MSDs are the largest category
of work-related illnesses in many countries. The treat-
ment of MSDs causes high costs in the public health
systems of various countries (for example the total
economic costs of MSDs in Canada for the year 1994
equals 3.4% of the gross domestic product) (Coyte
et al., 1998; Walker et al., 2003).
However, the emergence of MSDs can be delayed
or even prevented, if appropriate and timely preventive
measures are applied (Armstrong et al., 1996). Even if
the causes of MSDs are not always occupational cau-
478
Lins, C., Müller, S., Pfingsthorn, M., Eichelberg, M., Gerka, A. and Hein, A.
Unsupervised Temporal Segmentation of Skeletal Motion Data using Joint Distance Representation.
DOI: 10.5220/0006598904780485
In Proceedings of the 11th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2018) - Volume 5: HEALTHINF, pages 478-485
ISBN: 978-989-758-281-3
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

ses, heavy physical work such as manual handling and
lifting is often considered a risk factor for the emer-
gence of MSD (Amell and Kumar, 2001; Hoy et al.,
2010; Matsui et al., 1997). Thus, prevention measure-
ments become a necessity, e.g. as part of the corporate
health management in industrial companies with phy-
sically hard-working employees. For the prevention,
accompanying physiotherapists will support affected
employees, i.e. those with risk factors, to improve wor-
king processes. This improvement can already prevent
the emergence of occupational diseases, which usually
occur in the second half of life. At the organizational
level, an analysis of the workplace or work planning
could be used as starting point for new managements
concepts that already consider recovery phases in the
work plan.
It is an ongoing task of corporate health manage-
ment to continuously assess psychological and phy-
sical risk factors of every workplace and every wor-
king individual. Risk factors based on physical acti-
vity such as postures and motions can be derived
by human observers using pen-and-paper assessment
methods such as Ovako Working postures Analysing
System (OWAS) (Karhu et al., 1977), Rapid Entire
Body Assessment (REBA) (Hignett and McAtamney,
2000), Rapid Upper Limb Assessment (RULA) (Cor-
lett, 2003), the European assembly worksheet (EAWS)
(Schaub et al., 2013), and others. Such assessments are
tedious and time-consuming, i.e. costly, tasks which
could be supported or replaced by automatized Motion
Capture (MoCap) based systems.
When workers wear a MoCap system during their
work shifts, the posture data captured by the MoCap
system can be either stored for later analysis or prelimi-
narily evaluated on a wearable device (for example as
described by (Nath et al., 2017)). The analyzing soft-
ware can identify critical postures to give the wearer
an immediate feedback on her or his possibly harmful
postures. Then the employee might be able to actively
take a more ergonomic posture or interrupt the work
for a moment to recover.
An evaluating device has to process the motion
data in real-time, a task that requires appropriate algo-
rithms that handle the continuous stream of motions.
Consequently, we propose an approach using an algo-
rithm suited for segmenting dynamic human motion
data into short motion sequences (segments). Our con-
tribution is an online algorithm that uses a time series
of skeletal motions, which is transformed into a joint
distance matrix representation that makes the skeletal
representation rotation and translation invariant. The
algorithm exploits the joint distance representation to
derive a motion dynamics indication, i.e., whether a
motion represents a static posture or a dynamic mo-
tion. The output of the algorithm is a set of segmented
motion sequences with the associated motion dyna-
mics indication that can be further processed by the
assessment system (see also Figure 4).
In this paper, we first take a look at related work
of segmentation algorithms (2). We then explain the
segmentation algorithm in detail and compare the ef-
fectiveness of the new algorithm to the segmentation
algorithms of (Krüger et al., 2016; Vögele et al., 2014)
and (Zhou et al., 2013; Zhou et al., 2008). Finally, we
discuss the results and conclude this paper in the last
section.
2 RELATED WORK
Algorithms for unsupervised segmentation of motion
data can be divided into two classes. First, algorithms
that require a priori knowledge, i.e., the complete data
set (or a large batch) to select meaningful segmen-
tation (or cut) points (offline algorithms). Secondly,
algorithms that can work without (or very little) a pri-
ori knowledge processing data incrementally (online
algorithms).
Segmenting arbitrary time-series data into smaller
parts is a well-known problem in computer science
(Keogh et al., 2001), but there is some work speci-
fic to the problem of segmenting human motion data.
Zhou et al. – as an example of an often mentioned
offline method – use Dynamic Time Warping (DTW)
to describe the problem of motion segmentation as a
clustering problem which they address using kernel
k-means (Zhou et al., 2008). The authors conclude
that their method is computationally too expensive
for larger motion data sets and provide an improved
method that incorporates a hierarchical decomposition
of motions at different temporal scales (Zhou et al.,
2013). However, the improved version also has a time
complexity of
O(n
2
n
max
t)
with
n
number of input fra-
mes and
t
number of iterations. So it is presumably
not usable for real-time segmentation.
Vögele et al. , Krüger et al., and Stollenwerk et
al. order the skeletal input data using a k-d-tree to find
neighbors of a specific posture within a search radius
R
(Vögele et al., 2014; Krüger et al., 2016; Stollenwerk
et al., 2016). A set of neighbors is then represented as a
sparse self-similarity matrix whose graphical structure
is used to find distinct motion segments. The method
requires the distance between different neighbored pos-
tures, which are not all available in an online system.
Kulic et al. (Kulic et al., 2009) – in contrast to the
methods mentioned above – describe an approach for
an unsupervised online segmentation and clustering
algorithm. Here, a Hidden Markov Model (HMM)
Unsupervised Temporal Segmentation of Skeletal Motion Data using Joint Distance Representation
479

Figure 2: An example of a kneeling skeleton posture and
a joint distance matrix visualization as grayscale heatmap
(white pixel 0.0, black 1.0.)
is defined on a set of sliding windows containing the
motion data. A standard Gaussian density estimator is
used as observation probability distribution. A modi-
fied Viterbi algorithm is used to find the optimum state
sequence in the HMM, which represents the motion
segment. The growing number of states is circumven-
ted by limiting the number of windows, which weakens
the online capabilities.
Koenig and Matari
´
c (Koenig and Matari
´
c, 2006)
use a sliding window to search for local maxima in
feature space variances of demonstrated tasks in the
domain of robot learning from demonstration. Fea-
tures can vary depending on the behavior that is de-
monstrated to the robot. The authors recognize the
importance of online capable algorithms for such tasks
and propose a fast and intuitive method for segmenting
tasks into behaviors. Our approach is similar to this
one but specifically adapted to the purpose of human
motion segmentation. We use distances of concurrent
joint distance matrices as features. Additionally, our
algorithm does not use a sliding but dynamically gro-
wing (up to a maximum for every sequence) window
approach. Koenig and Matari
´
c’s algorithm emits a
segmentation point when a specific variance threshold
is recognized, our method, on the other hand, uses the
ratio between the variances of two sequences within
the window as the threshold. We explain our approach
in detail in the next section.
3 MOTION SEGMENTATION
ALGORITHM
3.1 Definitions and Preconditions
A motion capture system provides a sequence
M
of
m
skeletal postures
S
ordered in time, so
M =
(S
1
, S
2
, ..., S
m
)
. Every skeletal posture
S
i
is an
n
-tuple
S = (J
1
, J
2
, ..., J
n
)
where every
J
denotes a joint posi-
tion of the skeleton in R
3
.
3.2 Transformation to Distance
Matrices
The use of joint distance matrices as features for clas-
sifying motion capture data was first shown by (Vieira
et al., 2012). The representation of a posture as dis-
tance matrix has one major advantage: the representa-
tion is invariant to rotation or translation of the whole
body or the point of view of the observer. That me-
ans that it does not matter whether the skeleton comes
from an inertial sensor suite with its coordinate origin
at the body center or from an optical camera based
system such as Kinect with its coordinate origin at the
observing camera.
The joint distance matrix is also a self-similarity
matrix but it differs from the ones used in the other
mentioned algorithms (Vögele et al., 2014; Krüger
et al., 2016; Stollenwerk et al., 2016) as it is for the
multiple joint coordinates of one pose and not for all
poses of the motion sequence.
The skeletons provided for processing are in most
cases not normalized, i.e., they are not fitted to a stan-
dard skeleton size to make postures comparable. For
this reason, the algorithm can be provided with a nor-
malization factor to transform the skeleton before furt-
her processing. The normalization factor can be deri-
ved from the length of a rigid skeleton segment, e.g.,
shoulder-elbow or a femur bone. A normalization
makes the distance matrices comparable between dif-
ferent motion recordings and subjects. However, for
segmenting motion data into motion sequences, nor-
malization is not necessary.
The distance matrix
D
S
of a posture
S
can be defi-
ned as
D
S
= [||J
k
− J
l
||]
k,l
(1)
where
l, k
are the joint indices of the skeleton. In
other words,
D
S
is a
n ×n
matrix denoting the absolute
distances (a distance metric, e.g. Euclidean) between
every joint in posture
S
. As mentioned before, the
distances between joints with a rigid connection do
not change during motion so that these values can be
discarded (e.g. set to 0). Figure 2 shows an example
posture and the corresponding joint distance matrix as
grayscale heatmap image.
3.3 Distance Measure of Joint Distance
Matrices
We define a distance or similarity function
d
i j
=
s(D
i
, D
j
)
with
d ∈ R
+
. The similarity measure of
every distance matrix pair
(D
i
, D
i+1
)
is calculated for
0 ≤ i ≤ m − 1
. That means that we determine the
amount of change between two distance matrices each
HEALTHINF 2018 - 11th International Conference on Health Informatics
480
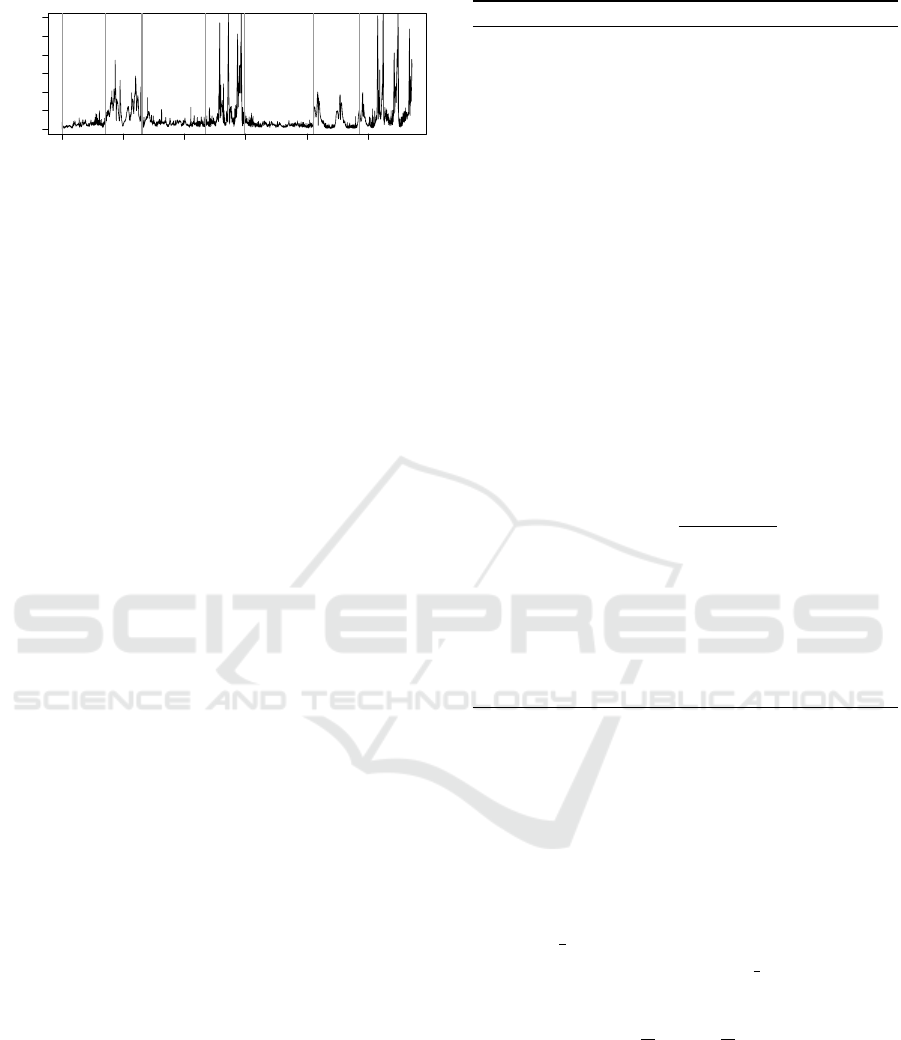
0 200 400 600 800 1000
0 1 2 3 4 5 6
Frame number
Distance
Figure 3: Distance Measures of Trial 01 with cut points (gray
vertical lines) of our algorithm (l
min
= 3.5).
representing a posture. A plot of a distance change of
one joint over time is shown in Figure 3.
Self-similarity matrices (such as joint distance ma-
trices) have some characteristics that are useful here.
First, the matrix is symmetric on its diagonal. That is
because of the definition of the distance function that is
used to fill the matrix. Then, if we assume that a bone
connecting two joints is rigid, the distance between
those two does not change throughout the recording.
It will only vary below the noise threshold. As a re-
sult, only the distances of joints not directly connected
are relevant for distance measure between two data
frames. A indicator function
c(J
l
, J
k
)
is derived from
the skeleton definition returning 0 if the connection is
rigid or l = k and 1 if the connection is not rigid.
With this indicator function
c
we can define the
distance function as modified L
1
norm:
s(X,Y ) =
n
∑
k=0
n
∑
l=k
(|x
k
− y
l
| · c(J
k
, J
l
)) (2)
with
X,Y
being two distance matrices as defined
by Equation 1. Other distance measures for matrices
could be adapted as well.
3.4 Maximize Variance Ratio
Differences between distance matrices (see
Equation 2
) can be seen as a continuous time
series. One problem with sensor-based time series is
the handling of noise. If the data is noisy, a non-robust
segmentation algorithm will return many extrema on
the noisy data. So the challenge is to find an algorithm
that properly filters noise, handles the peculiarities
of human motion and returns timestamps that can be
used as cut points for motion data.
Our algorithm finds a frame in a dynamic window
W
that separates the window into two segments, one
with high variance and one with low variance. Such
frame can be seen as start or end point of a motion
segment, e.g. a constrained posture with little dynamic
and a change to high dynamic (meaning high variance)
when the subject starts to move.
Algorithm 1: Segmentation algorithm.
Require: W
is a
n
-element window of distances
d
0
to
d
n
Require: l
min
, l
max
is the minimum/maximum seg-
ment length (default: l
max
= 4 · l
min
)
Require: T
is the min. threshold ratio that is required
for segmenting a window (default: T = 10)
1: function SEGMENT(W, l
min
, l
max
, T )
2: r ← 0
3: for p ← l
min
to p ← n − l
min
do
4: µ
1
← mean(W, 0, p) Sample mean
5: µ
2
← mean(W, p + 1, n)
6: σ
1
← var(W, µ
1
, 0, p) Sample variance
7: σ
2
← var(W, µ
2
, p + 1, n)
8: r ← max(r,
max(σ
1
, σ
2
)
min(σ
1
, σ
2
)
)
9: if r > T or length(W ) > l
max
then
10: p ← findMin(p,W, σ
1
, σ
2
, l
min
)
11: return p and σ
1
12: return No proper cut point found yet
The algorithm is outlined in pseudocode as Algo-
rithm 1. We assume a minimum segment length
l
min
to
avoid segmentation into very small motion fragments.
So the first possible segmentation (or cut) point is the
index at l
min
.
The index
p
for which the ratio
r = max
is a plau-
sible candidate for a cut point. To ensure that
d
p
is
a local minimum, which can be seen as a rest pose,
we search
l
c
c
steps for a local minimum in the part of
the window with lower variance.
l
c
must be a small
fraction of
l
. The function findMin (see Algorithm 1)
implements this linear search within the surrounding
data points (e.g. p −
l
2c
→ p +
l
2c
).
3.5 Detection of Constrained Postures
Constrained postures are often performed by industry
workers during their duties, e.g. holding a tool in a
static awkward position for several minutes. Such pos-
tures should be avoided as they can cause damage to
the musculoskeletal system. As a side effect of the
segmentation algorithm, the variance of the motion
Unsupervised Temporal Segmentation of Skeletal Motion Data using Joint Distance Representation
481

Motion Segmentation
Skeletal
Motion
Capture
Data
Joint Distance
Representation
Temporal
Motion
Segmentation
Algorithm
Posture Assessment
OWAS
EAWS, ...
Posture Risk
Evaluation
Risk
Report
Static
Postures
Motion
Segments
Figure 4: Process of WMSD Risk Factor Identification as enhancement to the model of (Lins et al., 2016).
segment
σ
1
is known and can be used to detect sta-
tic postures, because the high variance in the joint
distances is caused by rapid movement of limbs. A
small variance in the joint distances of consecutive
frames can be caused by no or little overall movement
of the subject or by continuous movement with very
little change over time (e.g. sneaking). As a result,
a segment can be identified as static posture by the
segmentation algorithm, but its classification as con-
strained posture must be done by other parts of the
assessment system (see Posture Assessment in Figure
4).
3.6 Time Complexity
For every input frame that is added to the current win-
dow
W
the segment function (see Algorithm 1) is cal-
led. The function consists of a loop with nested calcula-
tions of mean and variance. The worst-case time com-
plexity of that is
O((n − 2l
min
)(2n + 5) +
l
min
c
+ 2)
,
with
n
being size of the current window,
l
min
minimum
motion length and
c
constant. This can be simplified
to
O(n
2
)
. However, the window length is limited by
l
max
, so for a large number of data frames the com-
plexity of the segment function is not relevant. As a
result the overall time complexity for large
n
(with
n
: number of input frames) is
O(l
max
· c · n) → O (n)
,
which is necessary for an online algorithm working in
real-time.
4 EVALUATION OF THE
SEGMENTATION ALGORITHM
To evaluate the quality of the algorithm we use the re-
sults from the offline algorithms of (Zhou et al., 2013)
and (Krüger et al., 2016) as gold standard. Both pa-
pers used motion capture data of the publicly available
CMU database (Carnegie Mellon University, 2016), in
particular takes 01 to 14 from subject 86 (resampled
from
120 Hz
to
30 Hz
). We expect better results from
offline algorithms because they can exploit the full
temporal spectrum of the data, so they represent the
high bar of the results besides the ground truth. See
Figure 5 for a comparative overview of the results (our
algorithm with l
max
= 3.5).
The algorithms mentioned above differentiate bet-
ween motion segment and action class: the first can be
seen as a more granular motion primitive whereas the
latter can be seen as a broader view to activities of a
human. The ground truth of the human observers only
refers to action classes and as our algorithm does not
recognize different action classes but simple segments,
we only compare to the ground truth’s action classes
and do not use the segment boundaries reported by the
other algorithms.
The output of the segmentation algorithms is a
time-series of segment boundaries. As the algorithms
may return time-series of different lengths (because
of different numbers of segments), we use Dynamic
Time Warping (DTW) (Müller, 2007) to calculate the
path with the minimal total cost that is required to
warp the time-series of an algorithm to the one of the
ground truth. The minimal total cost can be seen as
the minimal amount of frames that are required to shift
every segment boundary to a ground truth segment
boundary.
Be
X
a time-series length
n
,
Y
length
m
, then the
distance
DTW
of the optimal warping path
p∗
is (Mül-
ler, 2007):
DTW (X,Y ) = c
p∗
(X,Y ) = min
L
∑
l=1
c(x
n
l
, y
m
l
) (3)
In our case the cost function
c(x, y)
simply means
the distance
|x − y|
. Table 1 shows the normalized
DTW distances of our method and two state-of-the-art
algorithms to Ground Truth (GT) for every of the 14
trials.
HEALTHINF 2018 - 11th International Conference on Health Informatics
482
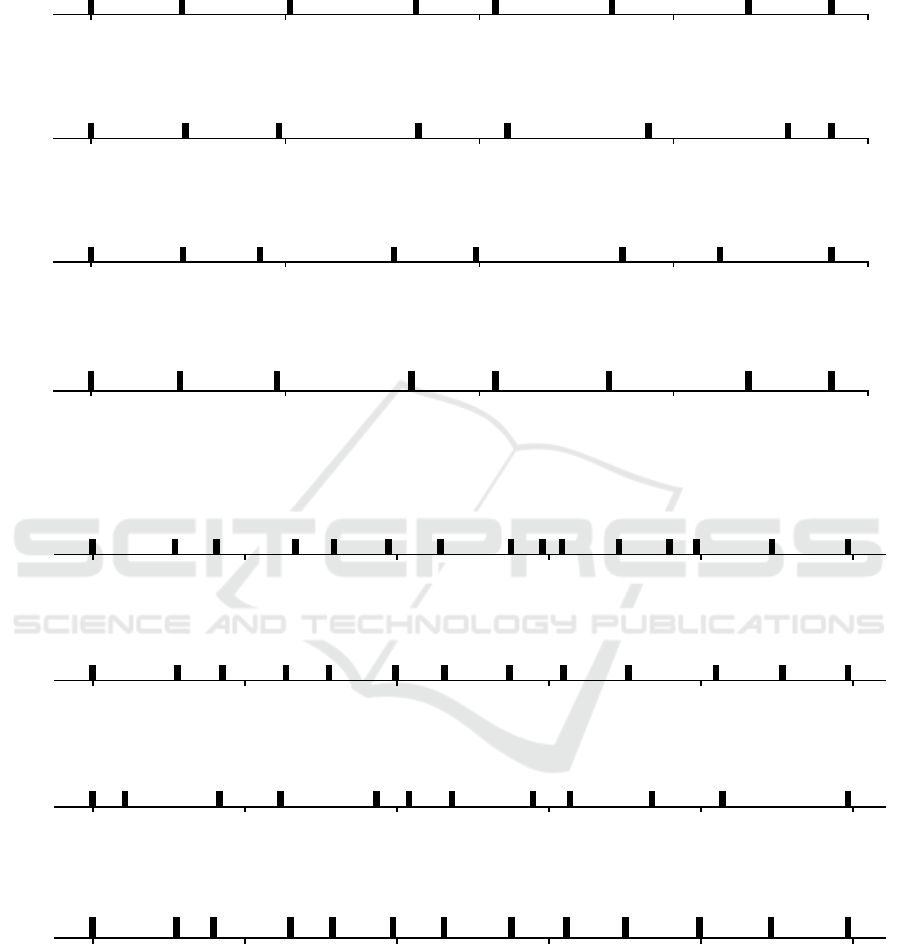
Trial 01
0 300 600 900 1200
Krüger et al. (2015)
0 300 600 900 1200
HACA
0 300 600 900 1200
Our method
0 300 600 900 1200
Frames
Ground Truth
Trial 06
0 500 1000 1500 2000 2500
Krüger et al. (2015)
0 500 1000 1500 2000 2500
HACA
0 500 1000 1500 2000 2500
Our method
0 500 1000 1500 2000 2500
Frames
Ground Truth
Figure 5: Graphical comparison of three segmentation algorithms with ground truth data for trials 1 (best case) and 6 (worst
case) of subject 86. Black bars mark the segmentation points. In case of (Krüger et al., 2016) the center of uncertainty was
chosen as the segmentation point.
5 DISCUSSION
The results show that the algorithm can continuously
segment motion data with robust although not supe-
rior quality compared to the offline segmentation al-
gorithms that can fully exploit the whole temporal
range of the data. In summary, the DTW distances
Unsupervised Temporal Segmentation of Skeletal Motion Data using Joint Distance Representation
483
Table 1: Normalized DTW distances of the three algorithms
to Ground Truth.
Trial
Our method
(l
min
= 3.5)
(Krüger
et al., 2016)
HACA (Zhou
et al., 2013)
01 20.59 11.38 26.68
02 25.21 19.49 30.40
03 39.21 18.42 27.25
04
32.71 17.28 25.88
05 31.00 17.33 15.97
06 65.50 15.13 18.19
07 27.27 10.38 12.48
08 26.06 11.11 21.71
09 44.41 10.90 17.75
10 47.18 25.75 22.00
11 49.15 17.83 17.05
12 53.18 35.83 26.60
13 39.42 32.63 31.35
14 32.62 21.39 21.33
∅
38.04
frames
18.92 22.47
of our algorithms’ results are about twice as high as
of the reference algorithms, although the results vary
notably throughout the different trials. The quality of
a segmentation algorithm is of course highly depen-
dent on the tasks performed by the motion capture
subject. It is not surprising that the offline working
algorithms deliver results of higher quality, but on the
other hand, they have roughly quadratic complexity
and require a priori knowledge whereas our algorithm
has linear complexity and requires very little a pri-
ori knowledge (maximum window size). In practice,
the average DTW distance of our algorithm means
that the segment is 1-2 seconds away from the ground
truth, which is sufficient if the motion segment is sig-
nificantly longer. As a plus, our method returns the
motion dynamics variance of the segmented motion
which is used as static posture indicator, i.e., if the
algorithm returns a segment with low variance we as-
sume a static posture that can be further processed by
an ergonomic assessment method. In summary, the
method is a practically usable approach that is easy to
understand and implement although its accuracy falls
behind the state-of-the-art offline methods.
6 CONCLUSION
We described and evaluated an online-capable (real-
time) temporal segmentation algorithm for skeletal
motion data. The algorithm can be used to detect sta-
tic postures in a continuous stream of skeletal motion
capture data. Together with a digitalized ergonomic
assessment method such as OWAS (Karhu et al., 1977)
the detected postures can be used to derive risk fac-
tors for (work-related) musculoskeletal disorders. Due
to the online capabilities of the algorithm, it is pos-
sible to implement a live feedback system for users
of MoCap suits/systems when they perform unfavo-
rable or dangerous postures. (Yan et al., 2017; Ray
and Teizer, 2012; Peppoloni et al., 2014) are examples
for such systems and could possibly be used with our
algorithm. Because of its simple computability, the
algorithm works well on embedded hardware, since
only simple floating point calculations are necessary.
ACKNOWLEDGEMENTS
This work was partly funded by the German Ministry
for Education and Research (BMBF) within the joint
research projects SIRKA (grant 16SV6243), MeSiB
(grant 16SV7723) and by the funding initiative Nie-
dersächsisches Vorab of the Volkswagen Foundation
and the Ministry of Science and Culture of Lower
Saxony as a part of the Interdisciplinary Research
Centre on Critical Systems Engineering for Socio-
Technical Systems II. The authors would like to thank
Anna Vögele (Vögele et al., 2014) for kindly providing
the reference data of Table 1 and Figure 5.
REFERENCES
Aggarwal, J. K. and Cai, Q. (1997). Human motion analysis:
A review. In IEEE Nonrigid and Articulated Motion
Workshop Proceedings, pages 90–102, Washington,
DC, USA. IEEE, IEEE Computer Society.
Amell, T. and Kumar, S. (2001). Work-related musculoskele-
tal disorders: Design as a prevention strategy. a review.
Journal of Occupational Rehabilitation, 11(4):255–
265.
Armstrong, T., Buckle, P., Fine, L., Hagberg, M., Haring-
Sweeney, M., Martin, B., Punnett, L., Silverstein, B.,
Sjøgaard, G., Theorell, T., et al. (1996). Musculoskele-
tal disorders: Work-related risk factors and prevention.
International Journal of Occupational and Environ-
mental Health, 2(3):239–246.
Carnegie Mellon University (2016). CMU Graphics Lab
Motion Capture Database.
Corlett, E. N. (2003). Rapid Upper Limb Assessment
(RULA). Occupational Ergonomics: Principles of
Work Design, 1(June):9.
Coyte, P. C., Asche, C. V., Croxford, R., and Chan, B. (1998).
The economic cost of musculoskeletal disorders in
canada. Arthritis & Rheumatism, 11(5):315–325.
Ellegast, R. (2013). Gefährdungsbeurteilung am Arbeits-
platz. In Hartmann, Spallek, and Ellegast, editors,
HEALTHINF 2018 - 11th International Conference on Health Informatics
484

Arbeitsbezogene Muskel-Skelett-Erkrankungen: Ursa-
chen, Prävention, Ergonomie, Rehabilitation, pages
107–130. Hüthig Jehle Rehm.
Hignett, S. and McAtamney, L. (2000). Rapid Entire Body
Assessment (REBA).
Hoy, D., Brooks, P., Blyth, F., and Buchbinder, R. (2010).
The epidemiology of low back pain. Best practice &
research Clinical rheumatology, 24(6):769–781.
Karhu, O., Kansi, P., and Kuorinka, I. (1977). Correcting
working postures in industry: A practical method for
analysis. Applied Ergonomics, 8(4):199–201.
Keogh, E., Chu, S., Hart, D., and Pazzani, M. (2001). An
online algorithm for segmenting time series. In Pro-
ceedings 2001 IEEE International Conference on Data
Mining, pages 289–296. IEEE.
Koenig, N. and Matari
´
c, M. J. (2006). Behavior-based seg-
mentation of demonstrated tasks. In Proceedings of
the International Conference on Development and Le-
arning. Unknown.
Krüger, B., Vögele, A., Willig, T., Yao, A., Klein, R., and
Weber, A. (2016). Efficient unsupervised temporal
segmentation of motion data. IEEE Transactions on
Multimedia, PP(99):1–1.
Kulic, D., Takano, W., and Nakamura, Y. (2009). Online
segmentation and clustering from continuous observa-
tion of whole body motions. IEEE Transactions on
Robotics, 25(5):1158–1166.
Lins, C., Eichelberg, M., Rölker-Denker, L., and Hein, A.
(2015). SIRKA: Sensoranzug zur individuellen Rück-
meldung körperlicher Aktivität. In 55. Wissenschaft-
liche Jahrestagung 2015 der Deutsche Gesellschaft
für Arbeitsmedizin und Umweltmedizin e.V., München,
pages 301–303. Deutsche Gesellschaft für Arbeitsme-
dizin und Umweltmedizin (DGAUM) e.V.
Lins, C., Müller, S. M., and Hein, A. (2016). Model-based
approach for posture and movement classification in
working environments. In Wichert, R. and Klausing,
H., editors, Ambient Assisted Living: 8. AAL-Kongress
2015,Frankfurt/M, April 29-30. April, 2015, pages 25–
33. Springer International Publishing, Cham.
Matsui, H., Maeda, A., Tsuji, H., and Naruse, Y. (1997).
Risk indicators of low back pain among workers in
japan: association of familial and physical factors with
low back pain. Spine, 22(11):1242–1247.
Müller, M. (2007). Dynamic time warping. In Information
Retrieval for Music and Motion, pages 69–84. Springer
Berlin Heidelberg, Berlin, Heidelberg.
Nath, N. D., Akhavian, R., and Behzadan, A. H. (2017).
Ergonomic analysis of construction worker’s body pos-
tures using wearable mobile sensors. Applied Ergono-
mics, 62.
Peppoloni, L., Filippeschi, A., Ruffaldi, E., and Avizzano,
C. A. (2014). (WMSDs issue) A novel wearable sy-
stem for the online assessment of risk for biomechani-
cal load in repetitive efforts. International Journal of
Industrial Ergonomics, 52:1–11.
Punnett, L. and Wegman, D. H. (2004). Work-related muscu-
loskeletal disorders: the epidemiologic evidence and
the debate. Journal of Electromyography and Kinesio-
logy, 14(1):13–23.
Ray, S. J. and Teizer, J. (2012). Real-time construction wor-
ker posture analysis for ergonomics training. Advanced
Engineering Informatics, 26(2):439–455.
Roetenberg, D., Luinge, H., and Slycke, P. (2013). Xsens
MVN : Full 6DOF Human Motion Tracking Using
Miniature Inertial Sensors. Technical report, Xsens
Technologies B.V.
Schaub, K., Caragnano, G., Britzke, B., and Bruder, R.
(2013). The European Assembly Worksheet. The-
oretical Issues in Ergonomics Science, 14(6):616–639.
Stollenwerk, K., Vögele, A., Krüger, B., Hinkenjann, A., and
Klein, R. (2016). Automatic temporal segmentation of
articulated hand motion. In International Conference
on Computational Science and Its Applications, pages
433–449. Springer.
Vieira, A. W., Lewiner, T., Schwartz, W. R., and Campos,
M. (2012). Distance matrices as invariant features
for classifying mocap data. In Pattern Recognition
(ICPR), 2012 21st International Conference on, pages
2934–2937. IEEE.
Vögele, A., Krüger, B., and Klein, R. (2014). Efficient
unsupervised temporal segmentation of human motion.
In Proceedings of the ACM SIGGRAPH/Eurographics
Symposium on Computer Animation, SCA ’14, pages
167–176, Aire-la-Ville, Switzerland, Switzerland. Eu-
rographics Association.
Walker, B., Muller, R., and Grant, W. (2003). Low back pain
in australian adults: the economic burden. Asia Pacific
Journal of Public Health, 15(2):79–87.
Wang, D., Dai, F., and Ning, X. (2015). Risk assessment of
work-related musculoskeletal disorders in construction:
State-of-the-art review. Journal of Construction Engi-
neering and Management, 141(6):04015008.
Wang, L., Hu, W., and Tan, T. (2003). Recent develop-
ments in human motion analysis. Pattern Recognition,
36(3):585 – 601.
Yan, X., Li, H., Li, A. R., and Zhang, H. (2017). Weara-
ble IMU-based real-time motion warning system for
construction workers’ musculoskeletal disorders pre-
vention. Automation in Construction, 74:2–11.
Zhou, F., De la Torre, F., and Hodgins, J. K. (2008). Aligned
cluster analysis for temporal segmentation of human
motion. In Automatic Face & Gesture Recognition,
2008. FG’08. 8th IEEE International Conference on,
pages 1–7. IEEE.
Zhou, F., De la Torre, F., and Hodgins, J. K. (2013). Hierar-
chical aligned cluster analysis for temporal clustering
of human motion. IEEE Transactions on Pattern Ana-
lysis and Machine Intelligence, 35(3):582–596.
Unsupervised Temporal Segmentation of Skeletal Motion Data using Joint Distance Representation
485
