
Visibility based WSPD for Global Illumination
M. Maria
1
, N. Mustafa
1
, T. Bardoux
1
, J. Defaye
2
and V. Biri
1
1
University of Paris-Est, LIGM, France
2
Ubisoft Motion Pictures, Montreuil, France
Keywords:
Ray Tracing, Many-light, VPL Clustering.
Abstract:
In the context of rendering production, and especially for indirect diffuse global illumination, many-light
techniques can be used to quickly render noise free images. In this paper, we propose a view-independent
algorithm, based on Well Separated Pair Decomposition (WSPD), to handle efficiently clustering of virtual
point lights. Our clustering, the Visibility based WSPD (V-WSPD) consider both geometric and visibility
information of two sets of points, allowing an improved rendering time with a similar image quality.
1 INTRODUCTION
In computer graphics industry, computing accurately
global illumination (GI) in complex scenes, like those
illustrated in Figure 1, remains really challenging
since the size of the assets and the number of lights
are massive. In such productions, path tracing or point
based GI methods are generally used to compute the
final image (K
ˇ
riv
´
anek et al., 2010). But their rende-
ring engine also computes separated layers of this fi-
nal image such as glossy reflection/refraction or indi-
rect diffuse lighting. The latter is a particular GI pro-
blem that could be handled with Virtual Point Light
(VPL) based techniques (Dachsbacher et al., 2014).
Visibility queries between pairs of points remain
one of the main cost of all GI algorithms (Dutr
´
e
et al., 2006). Thus, the knowledge of the overall
scene structure is a key to compute indirect illumi-
nation more efficiently, especially for a full sequence
of images of the same scene. Recent works, for in-
stance Imperfect Shadow Maps (Ritschel et al., 2008),
have followed this way. They approximate visibility
for indirect illumination by rendering a low-resolution
shadow map from a rough point-based representation
of the scene geometry. This approximation is then
used to achieve real-time GI on GPU.
Defined in the many-light framework, our work is
also based on visibility approximation but handles a
considerably larger number of VPL, for offline ren-
dering. It focuses on the visibility of two different
point sets, created along light paths vertices (such as
VPL). We redefine the work of (Bus et al., 2015a)
on the Well-Separated Pair Decomposition (WSPD)
method. While they use a pure geometric criterion
to build their structure, we drive the construction di-
rectly with visibility queries, along with the existing
geometric factor, while remaining view-independent.
The result is a new data structure, the Visibility ba-
sed WSPD (V-WSPD), that handles visibility to furt-
her reduce the number of shadow rays needed to com-
pute indirect illumination. We show that this additio-
nal visibility criterion allows to significantly speed up
rendering while keeping a similar image quality.
Therefore, our main contributions can be summa-
rized as follows:
• an efficient data structure, the V-WSPD, optimi-
zed for fast rendering with a large number of VPL;
• a view-independent construction algorithm, allo-
wing to reuse the V-WSPD for a full sequence of
images in case of static scenes;
• an analysis of the performance scalability w.r.t.
the visibility approximation accuracy.
This paper is organized as follows: Section 2 re-
views the existing many-light rendering techniques
related to our approach; Section 3 gives the theore-
tical background introducing our work; Section 4 de-
tails our new data structure, the V-WSPD; Section 5
presents and discusses experimental results; Section 6
concludes and gives several future work lines.
Maria, M., Mustafa, N., Bardoux, T., Defaye, J. and Biri, V.
Visibility based WSPD for Global Illumination.
In Proceedings of the 13th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2018) - Volume 1: GRAPP, pages
81-90
ISBN: 978-989-758-287-5
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
81

Figure 1: Examples of VPL rendering with the V-WSPD: rendered image, indirect illumination and error ×128. The scenes
(GEEKROOM and MARKET) come from the TV Series Rabbids Invasion of Ubisoft.
2 RELATED WORK
During this last decade, many-light methods have be-
come very attractive since they allow to render high-
quality, almost artifact-free, but biased images in a
fraction of the time taken by Monte-Carlo methods
to converge to a noise-free image. Thus, a lot of re-
cent researches focus on this topic (Simon et al., 2015;
Hedman et al., 2016; O’Donnell and Chajdas, 2017)
In this section, we focus on global illumination
in many-light methods, especially on techniques de-
signed to compute (or approximate) efficiently the
contribution of large amount of VPL. For real-time
techniques, improvements on VPL distribution or lig-
hting, and a detailed state-of-the-art report, the reader
is referred to (Dachsbacher et al., 2014).
Generating a high-quality image with many-light
algorithms usually requires from thousands to milli-
ons of VPL. A naive method, such as the original In-
stant Radiosity (Keller, 1997), which evaluates line-
arly the contribution of each VPL for each point to
shade, would be prohibitively time-consuming to be
used in practice. To overcome this problem, several
methods, called scalable methods, have been propo-
sed to accurately approximate the computation with a
sub-linear complexity. We review the most relevant
ones next.
2.1 VPL Clustering
Clustering methods aim at partitioning the set of VPL
into clusters w.r.t. their contribution to the image. The
goal is to store important VPL into small clusters and
negligible ones into largest clusters. Then, each clus-
ter is represented by a single representative light with
adapted intensity. When rendering, for each point to
shade, a subset of clusters (a clustering) is selected
to approximate the radiance. Thus, the number of
evaluations becomes drastically smaller than the total
amount of VPL and the computation is much faster.
The idea of VPL clustering has been introduced
in (Paquette et al., 1998). They build a hierarchical
octree on the set of VPL and then extract a clustering
of VPL for each point to be shaded. Their method
significantly speeds up the process but is not robust,
leading to badly chosen clustering. Since then, a lot of
methods have been presented. We propose to classify
them into two main families: tree-based methods and
matrix-based methods.
Tree-based Methods. Lightcuts (Walter et al.,
2005) is the first practical VPL clustering method.
It is based on a binary tree, called light tree, from
which a clustering is selected for each point to be
shaded. This selection is performed by refining the
tree from the root to minimize the error upper bound
until it is below a given perceptual threshold. Many
extensions of Lightcuts have followed this first work.
Multidimensional Lightcuts (MDLC) (Walter et al.,
2006) uses a shading point tree to handle distributed
effects such as anti-aliasing or motion blur. Bidirecti-
onal Lightcuts (Walter et al., 2012) extends MDLC to
handle more materials, such as glossy reflections or
subsurface scattering. (Wang et al., 2011) aim at im-
proving the clustering selection efficiency by exploi-
ting cluster coherence. IlluminationCut (Bus et al.,
2015b) uses two trees to cluster both pixels and VPL
and to further minimize the radiance evaluation cost
per pixel. (Rehfeld and Dachsbacher, 2016) propose
to compute the lightcuts only for a sparse subsam-
pled image and then to interpolate between these lig-
GRAPP 2018 - International Conference on Computer Graphics Theory and Applications
82

htcuts for all others point to be shaded. As part of
GPU computing, (Davidovi
ˇ
c et al., 2012) address the
problem of adapting Lightcuts to the GPU. Recently,
(Bus et al., 2015a) introduced a view-independent
VPL clustering method, built on a Well-Separated
Pair Decomposition (WSPD) structure. As the struc-
ture we propose is based on this work, it is described
with more details in Section 4.1.
Matrix-based Methods. Other methods directly
study the light transport matrix: rows of the matrix
represent the pixels of the image and columns cor-
respond to the VPL so that each row/column combi-
nation encodes the contribution of a VPL to a pixel.
(Ha
ˇ
san et al., 2007) first introduce the Matrix Row-
Column Sampling (MRCS) to generate a single glo-
bal clustering for the whole image. MRCS has been
adapted for animation using tensors and exploiting
temporal coherence (Ha
ˇ
san et al., 2008). The main
drawback of these methods is that they fail to cap-
ture local lighting. (Davidovi
ˇ
c et al., 2010) address
this problem by capturing separately the global and
local lighting and combining them to get the final
image. With the same goal, Lightslice (Ou and Pel-
lacini, 2011) partitions the image into slices and then
refines the global clustering for each slice. This solu-
tion consumes prohibitively too much memory to be
used with a large number of VPL. (Huo et al., 2015)
use a matrix separation technique to reduce the num-
ber of shadow rays needed. These methods are in-
herently view-dependent (they have to be performed
for each image to render) since they need the know-
ledge of (some) shading points. In this paper, we pro-
pose a structure that is fully view-independent. Thus,
it could be computed once, and reused for a full se-
quence of images.
2.2 VPL Sampling and Caching
Another way to reduce the algorithm complexity is
by choosing a relevant subset of VPL (or rejecting
negligible ones) w.r.t. their contribution to the final
image. For instance, Importance Sampling (Georgiev
and Slusallek, 2010) rejects VPL while Importance
Caching (Georgiev et al., 2012) builds a probability
function by computing and recording the contribution
of all VPL for a sparsely distributed shading points
into caches, called Importance Records. Then, for a
given point to shade, the closest Importance Records
are used to sample the VPL. Later, (Yoshida et al.,
2015) extend this work by proposing an adaptive ca-
che insertion to further reduce variance.
Once again these methods are view-dependent and
have to be performed for each image to render.
3 THEORETICAL BACKGROUND
Let S be the set of VPLs, and P be the set of points
to be shaded. The radiance caused by the direct illu-
mination of a single light source s ∈ S , for a surface
point p ∈ P observed from the direction ω is deno-
ted L
s
(p, ω) and defined as the product of its mate-
rial (M), geometric (G), visibility (V ) and intensity
(I) terms (cf. (Walter et al., 2005)):
L
s
(p, ω) = M
s
(p, ω) · G
s
·V
s
(p) · I
s
(1)
Then, for each point p to be shaded, the total radiance
L
S
(p, ω) is computed by summing all light contribu-
tions:
L
S
(p, ω) =
∑
s∈S
L
s
(p, ω) (2)
For a single cluster C ⊆ S, let rep(C) ∈ C be the
representative light of C. Then, the radiance can be
approximated as:
L
C
(p, ω) = M
rep(C)
(p, ω) · G
rep(C)
·V
rep(C)
(p) · I
rep(C)
(3)
The representative light’s intensity is usually precom-
puted once, as I
rep(C)
=
∑
s∈C
I
s
, and stored within the
cluster. Thus, rep(C) has to be chosen carefully to mi-
nimize the error caused by V
rep(C)
, G
rep(C)
and M
rep(C)
computation.
Then, for a clustering ζ = {C
1
, . . . ,C
n
} of S the
radiance can be approximated as:
L
ζ
(p, ω) =
∑
C∈ζ
L
C
(p, ω) (4)
Rendering an image means solving Equation 2 for
each p ∈ P . This can be seen as a graph scan pro-
blem on the complete bipartite graph G = (P , S , E
G
),
in which each edge (p, s) ∈ E
G
has a weight induced
by the Equation 1. The naive rendering method to
solve this problem would be to cast all the |P | · |S |
rays, a prohibitive number.
To reduce the complexity of this problem, as seen
in Section 2, several methods can be employed. For
instance, Importance sampling (Georgiev and Slusal-
lek, 2010) rejects some lights of S according to their
contribution on the image while LightSlice (Ou and
Pellacini, 2011) clusters both P and S to improve ren-
dering time while keeping good image quality.
But, to approximate the problem in a view-
independent way, and thus to get the same structure
for all images to be rendered, only the S set can be
considered. The goal is to get a clustering of S for
each s ∈ S. Then, the problem can be rephrased as
a scan of the complete Euclidean graph K = (S , E
K
)
on S and can be trivially solved in O(|S |
2
) since
|E
K
| = Θ(|S |
2
). Once again, given the usual huge
Visibility based WSPD for Global Illumination
83
number of lights in a scene, the graph is too dense
to be used in this way.
The Well-Separated Pair Decomposition
(WSPD) (Callahan and Kosaraju, 1995) is a
fundamental structure in computational geometry,
that provides a compact representation of K in O(|S |)
space. In other words, it is a partition of the
n
2
edges
of K into O(|S |) subsets. Each subset of the partition
is represented by two point sets (or clusters) A, B ⊆ S
that are well-separated.
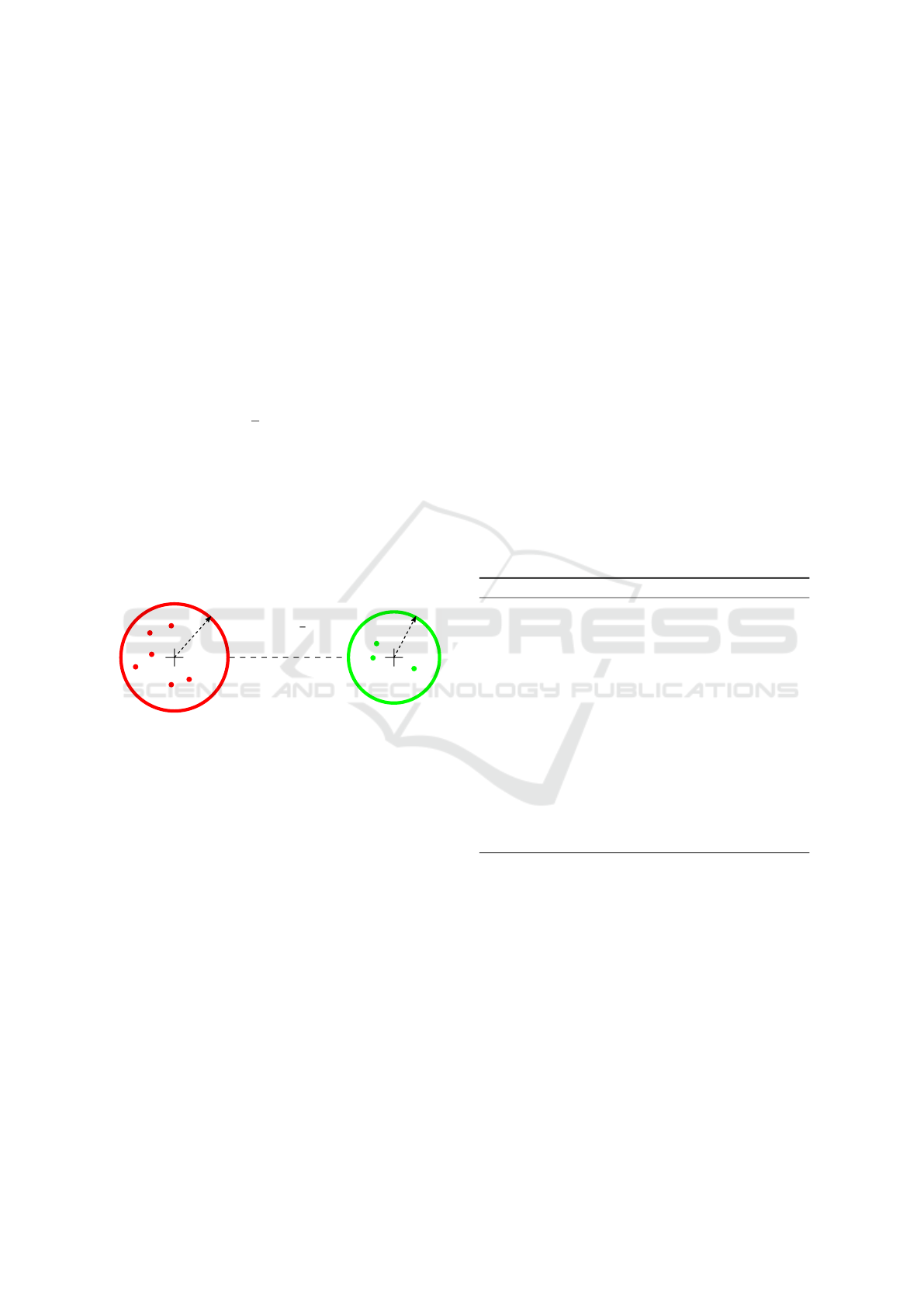
Let us denoted b(C) the smallest enclosing ball
containing all the points of the cluster C and r(C) its
radius. Two clusters A and B are well-separated if, for
a separation parameter 0 < ε ≤ 1:
d(A, B) >
1
ε
· max(r(A), r(B)),
where d(A, B) is the distance between b(A) and b(B)
(cf. Figure 2). We say that A and B are ws-clusters.
From that, we can define a WSPD of a point set S
with separation parameter ε as a set of pairs W =
{{A
1
, B
1
}, . . . , {A
k
, B
k
}} such that, ∀i:
A
i
, B
i
⊂ S ; A
i
∩ B
i
=
/
0,
A
i
and B
i
are well-separated w.r.t. ε.
r(A)
r(B)
A
B
d(A, B) >
1
ε
· r(A)
Figure 2: The clusters A and B are well-separated according
to the separation parameter ε.
(Bus et al., 2015a) show that the WSPD struc-
ture can pre-compute ws-clusterings of S in a view-
independent way and be used efficiently during ren-
dering to extract ws-clustering for each point to be
shaded. This pure geometric WPSD approximates
only the geometric G and intensity I terms of the
Equation 3. In their work, visibility is handled using
additional structures. In this paper, we avoid using ad-
ditional structures to approximate the visibility term
V by driving the WSPD construction using visibility
queries between ws-clusters candidates.
4 VISIBILITY BASED WSPD
In this section we describe our algorithm based on
VPL rendering with WSPD. We first recall some ba-
sics about WSPD clustering, then we focus on the
major improvement taking into account visibility bet-
ween clusters of points.
4.1 WSPD Clustering Basics
Here we recall some basics about the use of WSPD
for VPL rendering. More details can be found on (Bus
et al., 2015a).
Construction. The structure construction is sum-
marized in Algorithm 1. From a set of VPLs S , we
build a compressed octree in which a node represents
an axis-aligned bounding box containing a non-empty
subset of S. Each leaf contains one and only one
VPL and each node represents a cluster C defined by
a single representative light with an adapted intensity.
Then, the WSPD is constructed with a top down scan
of the tree. In the end, each node A of the octree sto-
res a list of nodes, denoted pairs(A), with whom it
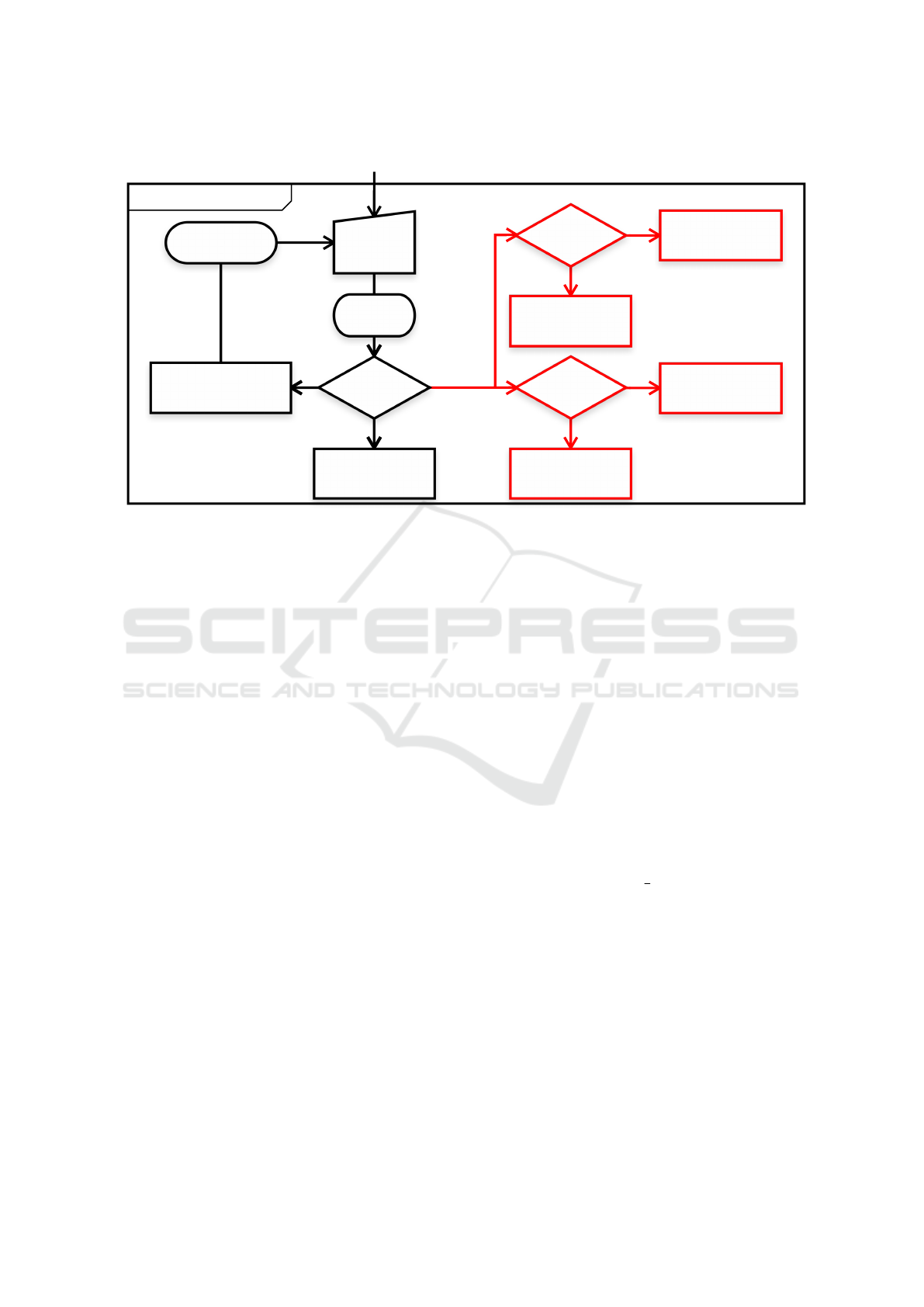
forms a pair. In its pure geometric form, the function
checkPair (cf. Alg. 1, line 8) works as follows (cf.
Figure 3, left): if the two nodes are well-separated
then they form a ws-pair; else, the process recursively
goes on with the children of the biggest node. This
function, checkPair, is the one we improve, as descri-
bed in Section 4.2, to take into account visibility.
Algorithm 1: Build a WSPD from a set of point.
Require: S : set of points;
1: O ← buildCompressOctree(S );
2: S: stack of nodes of S ;
3: S.push(O.root);
4: while S.notEmpty() do
5: C ← S.pop();
6: for i ∈ {1..8} do
7: for j ∈ {1..(i − 1)} do
8: // . . . . . . . . . . . . . . . . . . . . . . . . . cf. Figure 3
9: checkPair(C.child(i),C.child( j));
10: end for
11: S.push(C.child(i));
12: end for
13: end while
Precomputation of Clusterings of S . The goal is
to precompute, for each s ∈ S , a clustering ζ
s
=
{C
1
, . . . ,C
n
} of S \{s}. In fact, these clusterings are
implicitly encoded in the WSPD structure. Given that
each node contains the list of its well-separated clus-
ters, ζ
s
corresponds to the union of the pairs of all no-
des from the leaf containing s to the root of the octree.
Extraction of Clusterings of P during Rendering.
The final goal is to get, for any point p ∈ P , a cluste-
ring ζ
p
of S . This can be efficiently extracted from the
WSPD. First, we search for the (approximated) nea-
rest light s to p, with distance d. Then, from the pre-
computed clustering ζ
s
, ζ
p
is constructed as follows:
GRAPP 2018 - International Conference on Computer Graphics Theory and Applications
84
While Stack not empty
checkPair(A, B)
Stack
POP
PUSH
(V-WSPD)
{children(X),Y }
{A, B}
X = maxRadius(A, B)
Y = other
Refine biggest radius
Pure geometric WSPD Visibility WSPD
pairs(A).insert(B)
pairs(B).insert(A)
pairs(A).insert(B)
NO
YES
B.visible(A) ?
YES
NO
(WSPD)
isW S(A, B) ?
YES
re ject{A, B}
NO
pairs(B).insert(A)
NO
YES
A.visible(B) ?
re ject{B, A}
NO
Figure 3: Schematic algorithm for function checkPair(A, B) (Algorithm 1, line 8): left, pure geometric WSPD; right, additio-
nal process for visibility based WSPD.
∀C
i
∈ ζ
s
, if d(s,C
i
) ≥ d, add C
i
to ζ
p
, else repeat with
children(C
i
).
This pure geometric WSPD approximates only the
geometric term of the rendering equation but ignores
the others. To answer this issue, (Bus et al., 2015a)
use two additional structures. First, they compute
sub-groups of lights in each clusters w.r.t. their nor-
mals. Second, they pre-compute, for each cluster, a
small cube map to handle inner visibility inside this
cluster. These cube maps are used directly during ren-
dering, along with a single shadow test between p and
the cluster C, to estimate the contribution. This appro-
ach leads to two drawbacks:
• its construction needs two passes, one for the pure
geometric WSPD and another to compute visibi-
lity information and build the additional structu-
res;
• the computation of the cube maps for each cluster
is memory and time consuming;
Our purpose is to drive directly the WSPD con-
struction using visibility queries in order to have a
uniform data structure, easy to implement, and com-
puted in one pass.
4.2 Driving Construction with Visibility
To make the WSPD approximate the visibility term
of the rendering equation, we propose a new criterion
to decide on pair creation. Our method is illustrated
in Figure 3, the new part being in red, on the right.
In this section, we explain how we check visibility
between nodes and how this information can be used
to optionally refine the WSPD. Benefits from this new
method are presented and discussed in Section 5.
Visibility Checking. To reduce the number of
shadow rays needed to compute indirect illumination,
we use visibility queries to reject some pairs in the
WSPD.
Let A and B be two nodes, respectively represen-
ted by their enclosing ball b(A) and b(B). In the
pure geometric WSPD, two nodes form a pair if they
are well-separated i.e. if, for a separation parame-
ter 0 < ε ≤ 1, d(A, B) >
1
ε
· max(r(A), r(B)), where
d(A, B) is the distance between b(A) and b(B) and r is
the radius. Here, we first check for well-separateness
and then pairs are created w.r.t. their visibility.
First, we consider A as a shading node and B as a
light node. B will belong to pairs(A) if its representa-
tive light rep(B) is potentially visible from any point
p ∈ A (cf. Figure 4). We approximate the compu-
tation by checking the visibility between rep(B) and
some points H sampled on the hemisphere of b(A) fa-
cing rep(B). If each h
i
∈ H is not visible from rep(B),
then the pair is rejected. Then, the same process is re-
peated, considering B as a shading node and A as a
light node.
Visibility based WSPD for Global Illumination
85
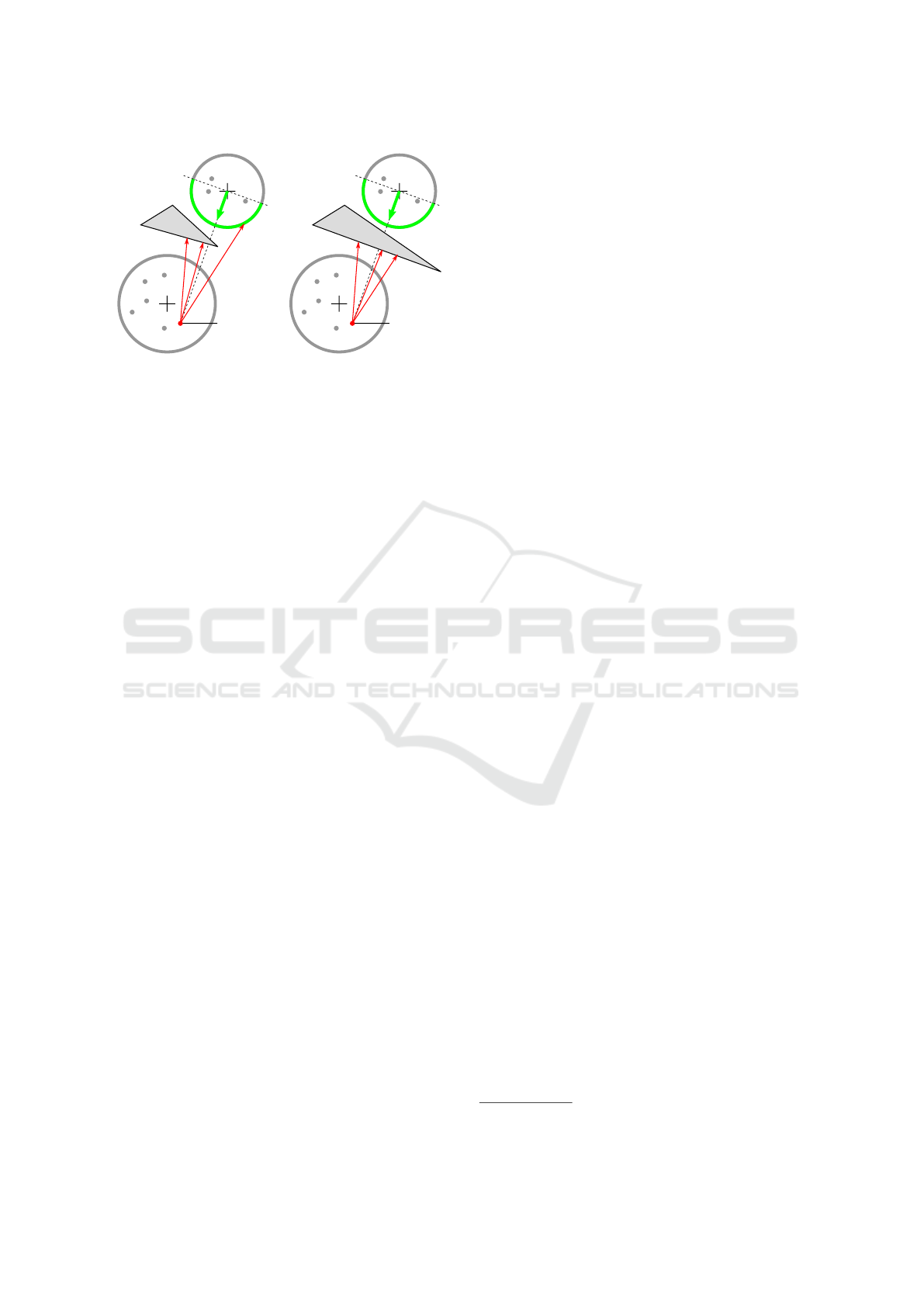
B
rep(B)
A
N
B
rep(B)
A
N
Figure 4: Visibility checking: A is the shading node and B
the light node; left: rep(B) is potentially visible from any
point p ∈ A; right: rep(B) is not visible.
We have to process differently the case where the
shading node is a leaf. When building the pure geo-
metric WSPD, leaves are considered with no radius.
In our case, a shading node represents a subset of P
so that if it is a leaf, we cannot ignore its radius. Thus,
for a leaf shading node P and a light node S, the pair
is automatically accepted if rep(S) is inside b(P).
The number of samples picked up on the shading
node hemisphere (denoted spv) is set by the user. The
higher spv is, the lower the error becomes, but with
an increase in precomputation time. We discuss the
impact of this parameter in Section 5. Now, we show
how this visibility information could be used to refine
the WSPD.
Visibility Refinement. The visibility check allows
to discard pairs according to their visibility. One
could think that these visibility queries could be used
to improve the WSPD quality: if the test fails, then
refine with shading node children. In practice, expe-
riments reveal that this strategy is not relevant for two
reasons.
First, it increases significantly the V-WSPD con-
struction time: for a unique refinement, it requires
to perform up to 8×spv additional visibility queries.
Moreover, in the worst case, when a shading node is
not visible at all, this strategy will conduct to refine
the full subtree, without any acceptation.
Second, the improvement on the overall image
quality is negligible. Indeed, since the clusters are
geometrically coherent due to the well-separation cri-
terion, the probability for a shading node to be visible
from a light while its parent has not been accepted is
very low.
5 RESULTS AND DISCUSSION
In this section, we present our experimental results on
four different scenes, illustrated in Table 2, with num-
ber of triangles given in Table 1. The first two, CON-
FERENCE and MUSEUM are commonly used scenes
in computer graphics. The two others, GEEKROOM
and MARKET are production scenes used for the TV
series Rabbids Invasion by Ubisoft. All scenes con-
tain roughly 600k VPL.
Timings are measured on an Intel Xeon E5-
2670 running at 2,3Ghz with 32GB of RAM, for
1024×1024 pixels images without anti-aliasing. We
use Embree for our ray tracing kernel (
´
Afra et al.,
2016). For WSPD based methods, ε is fixed at 0.25.
The influence of this parameter is detailed in (Bus
et al., 2015a). We compare the V-WSPD with the pure
geometric WSPD and with the state-of-the-art met-
hod IlluminationCut (Bus et al., 2015b) without adap-
tive sampling. We used the implementation provided
on the IlluminationCut author’s website
1
. We set the
maximum error bound to have roughly similar rende-
ring times, and we do not provide any limit for the
maximal cut size. Unfortunately, we could not com-
pare with Lightslice (Ou and Pellacini, 2011) since it
uses too much memory to be run on our machine.
5.1 Performance
Table 1 shows statistics about preprocess time, indi-
rect illumination rendering time and error averaged
from several points of view. We measure the normali-
zed RMSE in LAB color space to compute the nume-
rical difference with the naive VPL reference image
for indirect illumination. We choose to compare in
LAB color space because it is designed to represent
the human eye perception better than RGB. The er-
ror images shown in Table 2 are generated by com-
puting the channel-wise Euclidean distance in LAB
color space with the reference image and multiplying
it by 128 (to be visible). We first evaluate the per-
formance of the V-WSPD by comparing it with the
pure geometric WSPD in terms of rendering and con-
struction times. Then we compare it with the state-of-
the-art i.e. with IlluminationCut.
Rendering. As part of rendering, the V-WSPD al-
lows to reduce computation times by 45% (cf. Table 1)
while keeping a similar RMSE. This improvement
can be explained by analyzing the number of shadow
rays shot to compute indirect illumination. Indeed,
since the visibility checking rejects a lot of potenti-
ally non visible pairs, the number of shadow rays is
1
https://busnorbert.bitbucket.io/
GRAPP 2018 - International Conference on Computer Graphics Theory and Applications
86
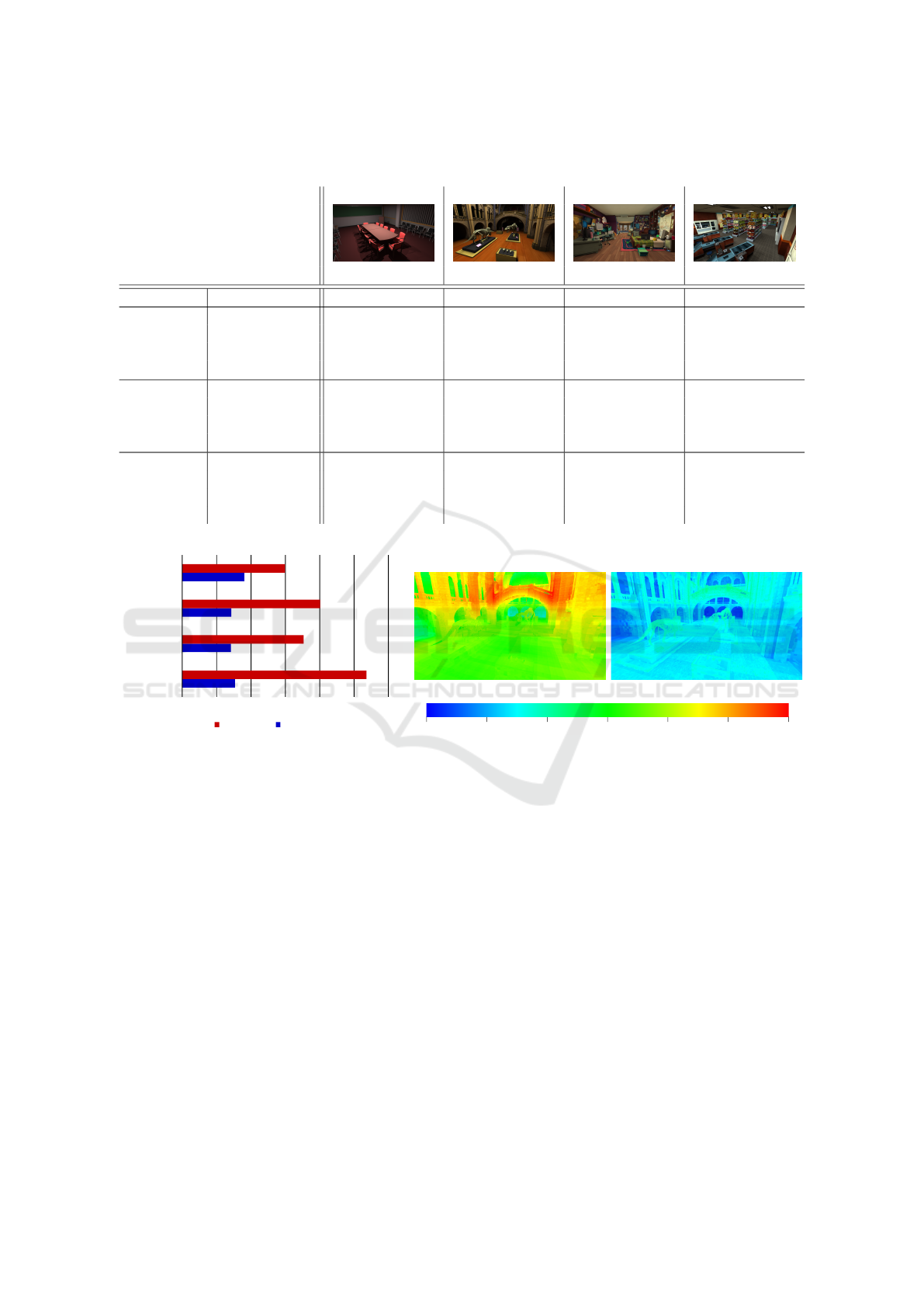
Table 1: Results and comparison for four scenes with 600k VPL: timing and error for naive method (VPL), pure geometric
WSPD, visibility based WSPD (V-WSPD) with 5 spv and IlluminationCut (IC) (Bus et al., 2015b).
CONFERENCE MUSEUM GEEKROOM MARKET
(262.3k tr.) (1.53M tr.) (39.04M tr.) (46.06M tr.)
Naive VPL Render (s) 2316.74 3579.62 3661.81 3845.64
WSPD
Preproc. (s) 2.85 3.65 4.63 6.51
Render (s) 12.83 19.74 24.24 29.91
RMSE 0.000450607 0.000695289 0.000602983 0.00189347
# pairs (×10
6
) 204.38 252.88 269.09 327.06
Preproc. (s) 12.75 19.61 34.95 63.96
V-WSPD Render (s) 8.64 11.12 13.68 13.87
(5 spv) RMSE 0.000462769 0.000712769 0.000604522 0.001998
# pairs (×10
6
) 96.89 80.82 113.46 100.64
IC
Preproc. (s) 105.94 218.51 249.91 290.49
Render (s) 8.53 10.86 13.88 13.71
RMSE 0.000266304 0.000504664 0.00046284 0.00131467
Err. bound (%) 1 4 1 1.2
WSPD V-WSPD
0 2000 4000 6000
CONF.
MUSEUM
GEEK.
MARKET
(a)
WSPD V-WSPD - 5 spv
0 600050004000300020001000
#shadow rays per pixel
(b)
Figure 5: Number of shadow rays for WSPD and V-WSPD: (a) average number of shadow rays per pixel for each scene (same
points of view as Table 2); (b) false-colored images of the MUSEUM scene.
highly reduced and rendering performance are higher
(cf. Figure 5). We can notice that for the MARKET
scene, the improvement on rendering times is much
better, due to the high level of occlusion brought for
instance by the shelves. For a shading node located
near the shelves, a lot of pairs are rejected so a lot of
shadow rays are avoided. For the same scene, we can
see some blocking artifacts in the false-colored image
in Table 2, due to the visibility approximation. These
artifacts are visible because error is multiplied by 128
but are not perceptible in the final image.
Construction. As expected, V-WSPD construction
times are higher than pure geometric WSPD ones.
This is due to the visibility queries needed to drive
the construction. In this way, the complexity does
not only depend on the number of VPL but also on
the number of polygons making up the scene: one
visibility query requires to scan the geometry in or-
der to determine if there is an intersection. Moreover,
the higher the occlusion degree of a scene, the higher
the construction time because more visibility queries
have to be performed before rejecting a pair.
One should consider that, since the V-WSPD
structure is completely view-independent, it has to be
constructed only once for a full sequence of images.
This is a concrete advantage in case of walk-through
system or even to compute static layer in animation
production. Indeed, the time lost when constructing
the structure is negligible w.r.t. the time earned when
rendering: for instance, with MARKET scene, con-
struction time is amortized from the fourth image.
Visibility based WSPD for Global Illumination
87
Comparison State-of-the-Art. For similar rende-
ring time, we can notice that IlluminationCut gene-
rates images with a lower RMSE. In counterpart, pre-
processing times are considerably higher (about 7 ti-
mes). This shows that the way to build the WSPD ba-
sis structure is not necessarily the best and that some
work has to be done to achieve better quality. Indeed,
for now, the space partition used to build the WSPD
is just a regular octree and does not rest on a specific
metrics as the light tree of IlluminationCut.
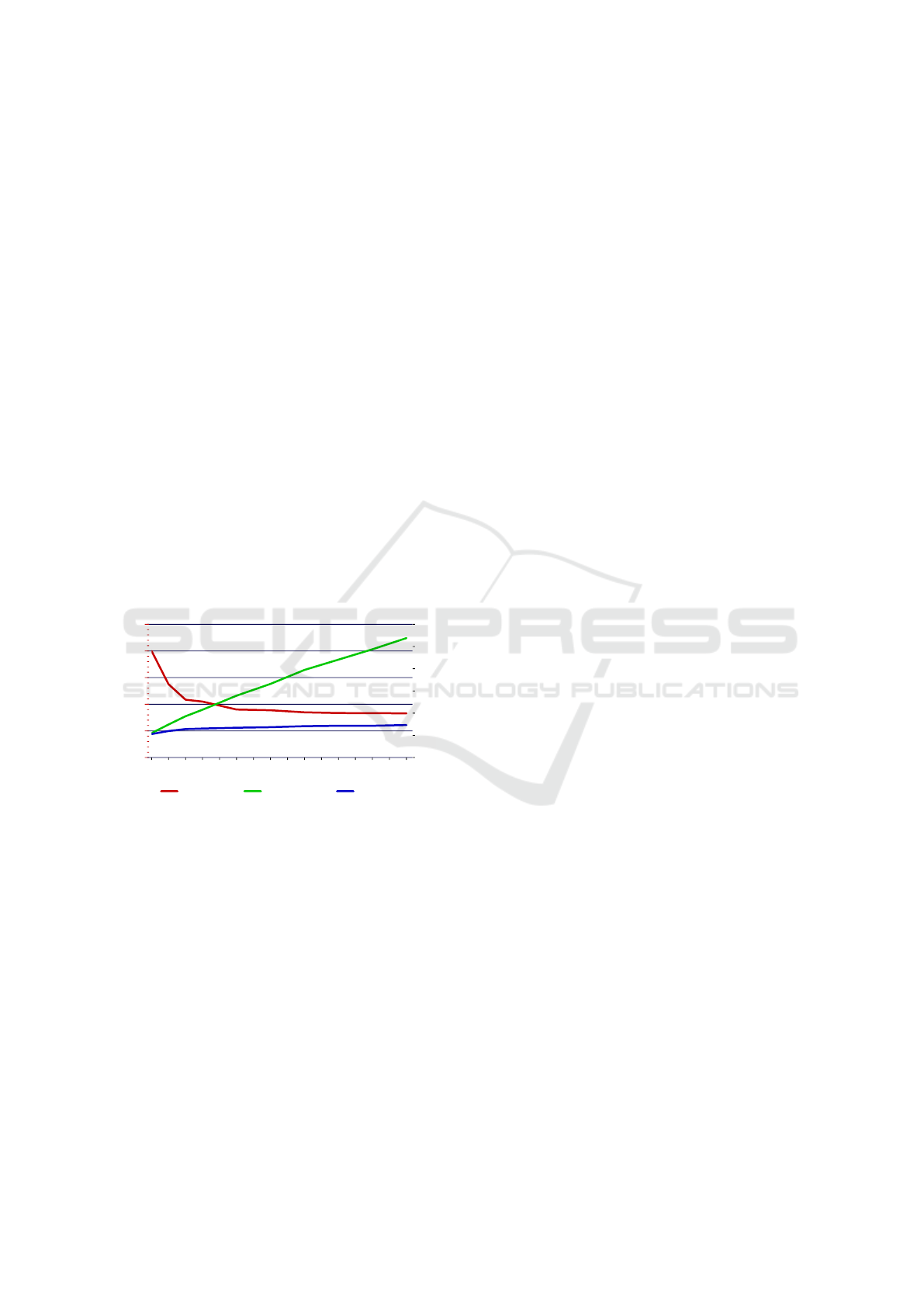
5.2 Visibility Checking
As stated in Section 4.2, the number of samples (spv)
used to approximate the potential visibility between a
shading node and a light node can be tweaked to in-
fluence both performance and precision of our algo-
rithm. In practice, for a shading cluster P and a light
cluster S, the first visibility check corresponds to the
direct visibility between rep(S) and b(P). Following
points on b(P) are determined with stratified hemis-
phere sampling. Figure 6 shows the impact of this
parameter, spv, on construction time, rendering time
and image quality, for the MUSEUM scene.
0.6
1.1
0.7
0.8
1
0.9
0
60
50
40
30
20
10
spv:
2 4 6 8 10 12 14 16
RMSE (×10
−3
) T (s)
Error T
build
T
render
Figure 6: Error (RMSE), construction time (T
build
) and ren-
dering time (T
render
) w.r.t. number of samples per visibility
check (spv), for the MUSEUM scene.
As expected, construction time grows linearly
with spv since more visibility queries are performed.
But it does not influence rendering time. Of course
the RMSE is improved by the growth of spv, but it
tends to converge rapidly. Therefore, we noticed, in
all our scenes, that a 4 to 6 value for spv is a good
trade-off between speed and quality.
6 CONCLUSION AND FUTURE
WORK
We have presented a new data structure for VPL clus-
tering: the Visibility based WSPD (V-WSPD). It rede-
fines the work of (Bus et al., 2015a) on the WSPD by
driving the construction with visibility queries (along
with the existing geometric factor), while remaining
view-independent.
We have shown that the V-WSPD allows to
achieve far better rendering times than the pure ge-
ometric WSPD while keeping a similar image qua-
lity. This improvement implies an increase in con-
struction times, since it requires to cast rays to deter-
mine visibility. But, given that the V-WSPD is view-
independent, it could be reused for a full sequence
of images, so that the loss in construction times is
quickly amortized.
Compared to the state-of-the-art method, Illumi-
nationCut (Bus et al., 2015b), our method generates
images with higher error even if these errors are not
visible to the naked eye (cf. table 2). In counterpart,
IlluminationCut preprocessing time is far higher. To
improve the accuracy of our method, we could change
the basis structure of the V-WSPD, trying different
partition structures such as a kd-tree (as it has been
done in physics for N-body simulation (Lopes et al.,
2014)) or a Multi-BVH (Ernst and Greiner, 2008). In
that case, these partitions should be constructed cle-
verly w.r.t. VPL distribution and contribution.
Another idea would be to compact the V-WSPD
with the space partition used as acceleration struc-
ture for the scene geometry. Thus, rendering times
could be further improved since only one structure
scan would be necessary for both primary ray casting
and indirect illumination.
Finally, we plan to use the concept of pair de-
composition for different kinds of set of points: light
source points, importance records (points viewed
from the camera) and even pure geometrical points.
The latter implies a good point sampling for the scene
geometry. All these combinations of pair of point sets
can be used for both points clustering, points sam-
pling and points rejection. This drives us toward a
framework for clustering, rejecting or selecting pair
of points that can be useful in several situations in
rendering (coarse evaluation of visibility, driving light
transport in path tracing. . . ).
ACKNOWLEDGEMENTS
This work has been supported by the BPI France PA-
PAYA grant, from the Programme d’Investissement
d’Avenir. Authors would like to thank Ubisoft Motion
Pictures Montreuil for giving us for the GEEKROOM
and MARKET scenes, and K. Renaudeau for English
language reviewing.
GRAPP 2018 - International Conference on Computer Graphics Theory and Applications
88

Table 2: Comparison for same rendering time: pure geometric WSPD, visibility based WSPD (V-WSPD), Illumination-
Cut (Bus et al., 2015b) and false-colored image for error (Euclidean distance ×128 in LAB color space).
WSPD V-WSPD IlluminationCut
CONFERENCE
MUSEUM
GEEKROOM
MARKET
Visibility based WSPD for Global Illumination
89

REFERENCES
´
Afra, A. T., Wald, I., Benthin, C., and Woop, S. (2016).
Embree ray tracing kernels: Overview and new fea-
tures. In ACM SIGGRAPH 2016 Talks, SIGGRAPH
’16, pages 52:1–52:2, New York, NY, USA. ACM.
Bus, N., Mustafa, N. H., and Biri, V. (2015a). Global il-
lumination using well-separated pair decomposition.
Computer Graphics Forum, 34(8):88–103.
Bus, N., Mustafa, N. H., and Biri, V. (2015b). Illumina-
tionCut. Computer Graphics Forum (Proceedings of
Eurographics 2015), 34(2):561 – 573.
Callahan, P. B. and Kosaraju, S. R. (1995). A decomposition
of multidimensional point sets with applications to k-
nearest-neighbors and n-body potential fields. J. ACM,
42(1):67–90.
Dachsbacher, C., K
ˇ
riv
´
anek, J., Ha
ˇ
san, M., Arbree, A., Wal-
ter, B., and Nov
´
ak, J. (2014). Scalable realistic ren-
dering with many-light methods. Computer Graphics
Forum, 33(1):88–104.
Davidovi
ˇ
c, T., Georgiev, I., and Slusallek, P. (2012). Pro-
gressive lightcuts for gpu. In ACM SIGGRAPH 2012
Talks, SIGGRAPH ’12, New York, NY, USA. ACM.
Davidovi
ˇ
c, T., K
ˇ
riv
´
anek, J., Ha
ˇ
san, M., Slusallek, P., and
Bala, K. (2010). Combining global and local virtual
lights for detailed glossy illumination. ACM Trans.
Graph., 29(6):143:1–143:8.
Dutr
´
e, P., Bala, K., Bekaert, P., and Shirley, P. (2006). Ad-
vanced Global Illumination. AK Peters Ltd.
Ernst, M. and Greiner, G. (2008). Multi Bounding Volume
Hierarchies. In IEEE Symposium on Interactive Ray
Tracing, RT ’08, pages 35–40.
Georgiev, I., K
ˇ
riv
´
anek, J., Popov, S., and Slusallek, P.
(2012). Importance caching for complex illumination.
Computer Graphics Forum, 31(2pt3):701–710.
Georgiev, I. and Slusallek, P. (2010). Simple and Robust Ite-
rative Importance Sampling of Virtual Point Lights. In
Lensch, H. P. A. and Seipel, S., editors, Eurographics
2010 - Short Papers. The Eurographics Association.
Ha
ˇ
san, M., Pellacini, F., and Bala, K. (2007). Matrix row-
column sampling for the many-light problem. ACM
Trans. Graph., 26(3).
Ha
ˇ
san, M., Vel
´
azquez-Armendariz, E., Pellacini, F., and
Bala, K. (2008). Tensor clustering for rendering
many-light animations. In Proceedings of the Nine-
teenth Eurographics Conference on Rendering, EGSR
’08, pages 1105–1114, Aire-la-Ville, Switzerland. Eu-
rographics Association.
Hedman, P., Karras, T., and Lehtinen, J. (2016). Sequential
monte carlo instant radiosity. In Proceedings of the
20th ACM SIGGRAPH Symposium on Interactive 3D
Graphics and Games, I3D ’16, pages 121–128, New
York, NY, USA. ACM.
Huo, Y., Wang, R., Jin, S., Liu, X., and Bao, H. (2015).
A matrix sampling-and-recovery approach for many-
lights rendering. ACM Trans. Graph., 34(6):210:1–
210:12.
Keller, A. (1997). Instant radiosity. In Proceedings of
the 24th Annual Conference on Computer Graphics
and Interactive Techniques, SIGGRAPH ’97, pages
49–56, New York, NY, USA. ACM Press/Addison-
Wesley Publishing Co.
K
ˇ
riv
´
anek, J., Fajardo, M., Christensen, P. H., Tabellion, E.,
Bunnell, M., Larsson, D., and Kaplanyan, A. (2010).
Global illumination across industries. In ACM SIG-
GRAPH 2010 Courses, SIGGRAPH ’10, New York,
NY, USA. ACM.
Lopes, R. H. C., Reid, I. D., and Hobson, P. R. (2014). A
well-separated pairs decomposition algorithm for k-d
trees implemented on multi-core architectures. Jour-
nal of Physics: Conference Series, 513(5):052011.
O’Donnell, Y. and Chajdas, M. G. (2017). Tiled light trees.
In Proceedings of the 21st ACM SIGGRAPH Sympo-
sium on Interactive 3D Graphics and Games, I3D ’17,
pages 1:1–1:7, New York, NY, USA. ACM.
Ou, J. and Pellacini, F. (2011). Lightslice: Matrix slice
sampling for the many-lights problem. ACM Trans.
Graph., 30(6):179:1–179:8.
Paquette, E., Poulin, P., and Drettakis, G. (1998). A light
hierarchy for fast rendering of scenes with many lig-
hts. Computer Graphics Forum, 17(3):63–74.
Rehfeld, H. and Dachsbacher, C. (2016). Lightcut interpola-
tion. In Proceedings of High Performance Graphics,
HPG ’16, pages 99–108, Aire-la-Ville, Switzerland.
Eurographics Association.
Ritschel, T., Grosch, T., Kim, M. H., Seidel, H.-P., Dachs-
bacher, C., and Kautz, J. (2008). Imperfect Shadow
Maps for Efficient Computation of Indirect Illumina-
tion. ACM Trans. Graph. (Proc. of SIGGRAPH ASIA
2008), 27(5).
Simon, F., Hanika, J., and Dachsbacher, C. (2015). Rich-
vpls for improving the versatility of many-light met-
hods. Comput. Graph. Forum, 34(2):575–584.
Walter, B., Arbree, A., Bala, K., and Greenberg, D. P.
(2006). Multidimensional lightcuts. ACM Trans.
Graph., 25(3):1081–1088.
Walter, B., Fernandez, S., Arbree, A., Bala, K., Donikian,
M., and Greenberg, D. P. (2005). Lightcuts: A sca-
lable approach to illumination. ACM Trans. Graph.,
24(3):1098–1107.
Walter, B., Khungurn, P., and Bala, K. (2012). Bidirectional
lightcuts. ACM Trans. Graph., 31(4):59:1–59:11.
Wang, G., Xie, G., and Wang, W. (2011). Efficient search
of lightcuts by spatial clustering. In SIGGRAPH Asia
2011 Sketches, SA ’11, pages 26:1–26:2, New York,
NY, USA. ACM.
Yoshida, H., Nabata, K., Iwasaki, K., Y., D., and T., N.
(2015). Adaptive importance caching for many-light
rendering. Journal of WSCG, 23(1):65–72.
GRAPP 2018 - International Conference on Computer Graphics Theory and Applications
90
