
Superpixel-based Road Segmentation for Real-time Systems using CNN
Farnoush Zohourian
1
, Borislav Antic
2
, Jan Siegemund
2
, Mirko Meuter
2
and Josef Pauli
1
1
University of Duisburg-Essen, Department of Computer Science and Applied Cognitive Science,
47048, Duisburg, Germany
2
Delphi Electronics & Saftey, D-42119, Wuppertal, Germany
Keywords:
Superpixel, Semantic Segmentation, CNN, Deep Learning, Road Segmentation.
Abstract:
Convolutional Neural Networks (CNN) contributed considerable improvements for image segmentation tasks
in the field of computer vision. Despite their success, an inherent challenge is the trade-off between accuracy
and computational cost. The high computational efforts for large networks operating on the image’s pixel grid
makes them ineligible for many real time applications such as various Advanced Driver Assistance Systems
(ADAS). In this work, we propose a novel CNN approach, based on the combination of super-pixels and high
dimensional feature channels applied for road segmentation. The core idea is to reduce the computational
complexity by segmenting the image into homogeneous regions (superpixels) and feed image descriptors
extracted from these regions into a CNN rather than working on the pixel grid directly. To enable the necessary
convolutional operations on the irregular arranged superpixels, we introduce a lattice projection scheme as
part of the superpixel creation method, which composes neighbourhood relations and forces the topology to
stay fixed during the segmentation process. Reducing the input to the superpixel domain allows the CNN’s
structure to stay small and efficient to compute while keeping the advantage of convolutional layers. The
method is generic and can be easily generalized for segmentation tasks other than road segmentation.
1 INTRODUCTION
One of the long-lasting goals of computer vision is the
automated scene understanding from a variety of ima-
ges. Exposing image specification is useful for appli-
cations, like image editing, image search and environ-
ment perception for autonomous vehicles. Detecting
objects like roads, pedestrians, vehicles, traffic signs,
etc. is important for many driver-less cars and driver
assistance systems. Due to the variability of different
factors like colour, shape, illumination and shadows
or obstacles on the road surface, the road detection is
a challenging problem. The state of arts techniques to
solve this problem are mainly based on deep learning
and Convolutional Neural Networks (CNNs) (LeCun
et al., 2015; Schmidhuber, 2015). These methods ena-
ble towards better visual understanding by applying a
semantic segmentation process in which each pixel is
assigned to an object category. The segmentation re-
sult provides meaningful information to support hig-
her level scene understanding tasks.
Currently, there are two major approaches to train
CNN-based image processing systems. The two ap-
proaches differ with respect to the input data mo-
del. One of the approaches is based on a patch-wise
analysis of the images, i.e. an extraction and clas-
sification of rectangular regions having a fixed size
for every single image (Ciresan et al., 2012; Farabet
et al., 2013; Ganin and Lempitsky, 2014; Ning et al.,
2005). The other one is based on full image reso-
lution, wherein all pixels of an image in the original
size are analyzed (Long et al., 2015). Most recent
improvements in both CNN-based methods were ac-
complished by increasing the network size (Simonyan
and Zisserman, 2014; He et al., 2016), whereas dee-
per networks provoke large computational costs that
make them unsuitable for embedded devices in driver
assistance systems.
In the current work we apply a superpixel-based
CNN method for the specific application of pixel-wise
road segmentation that uses superpixels as input data
model. To the best of our knowledge, it is the first
time that irregular superpixels with regular lattice pro-
jection for Convolutional purpose is given as input
data model into a CNN network. The proposed met-
hod comprises the following steps: first, segmenting
the image into superpixels, wherein the superpixels
are coherent image regions comprising a plurality of
Zohourian, F., Antic, B., Siegemund, J., Meuter, M. and Pauli, J.
Superpixel-based Road Segmentation for Real-time Systems using CNN.
DOI: 10.5220/0006612002570265
In Proceedings of the 13th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2018) - Volume 5: VISAPP, pages
257-265
ISBN: 978-989-758-290-5
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
257

pixels having similar image features. Then determi-
ning image descriptors for the superpixels, wherein
each image descriptor comprises a plurality of image
features. The superpixels are assigned to correspon-
ding positions of a regular grid structure extending
across the image. This lattice together with the image
descriptors are fed to the convolutional network ba-
sed on the assignment to classify the superpixels of
the image according to semantic categories.
Feeding a network with almost well segmented
”superpixel” units enables the network to learn local
information like contrast, shape, texture, etc. much
better rather than using raw image pixels. In Compa-
rison to (Long et al., 2015) that is based on full re-
solution input data and has a deep convolutional net-
work layering (e.g: vgg-19), our method combines
larger basic units ”super-pixels” with simple network
structure. This results in significant reduction of the
computational costs for a densely labelled map pre-
diction. Contrary to patch-based semantic segmen-
tation approaches (Farabet et al., 2013), information
about spatial context in the proposed method can be
preserved preferably due to the usage of superpixels.
The remainder of this paper is organized as fol-
lows. Sec.2 presents an overview over related work.
Sec.3 focuses on the proposed superpixel-based Con-
volutional Neural Network approach. We describe the
superpixel segmentation method and how it is embed-
ded in Sec. 3.1. Then the feature selection is discus-
sed in Sec. 3.4. The network architecture and para-
meters is argued further in Sec.3.5. Sec.4 presents ex-
periments and results. Sec.5 draws a conclusions and
discusses future works and required improvements.
2 RELATED WORK
Deep Learning is a machine learning concept to mo-
del higher level features by learning hierarchies of
lower-level features (LeCun et al., 2015). Convo-
lutional neural network is a deep learning technique
which has been effectively applied in different com-
puter vision applications, such as n image classifica-
tion (Krizhevsky et al., 2012), object detection (Girs-
hick et al., 2014; P. Sermanet, 2013), scene labeling
(Farabet et al., 2013; Chen et al., 2014). The state of-
the-art methods for semantic segmentation are gene-
rally fully convolutional networks (Long et al., 2015)
which are directly applied to the whole image. This
method has been improved further in several newer
approaches such as ”DeepLab” (Chen et al., 2014).
However, most of the per pixel labeling methods are
too expensive for embedded applications and they re-
quire powerful GPUs to be fast enough for achieving
the real-time performance.
In this paper we combine superpixels segmenta-
tion with convolutional neural network. Several other
methods benefit from this combination too. Gadde
(Gadde et al., 2016) embedded superpixels into a ne-
wly defined layer that he names ”Bilateral Inception”
which acts as an edge preserving filter. This layer is
substituted with a fully connected layer and propaga-
tes label information between superpixels. This re-
sults in better segmentation than in exclusively pixel-
wise approaches. However, this network still uses full
resolution images as the inputs. SuperCNN (He et al.,
2015) is a neural network based approach for salient
object detection. A sequence of superpixels, instead
of a 2D image pattern, is fed into this network. Con-
trary to this 1-D inputs, our proposed method uses a
2D-grid of superpixels as input to the network which
allows for easier extraction of the neighborhood in-
formation by convolutional network.
3 SUPERPIXEL-BASED
CONVOLUTIONAL NEURAL
NETWORK
This work addresses the task of road segmentation
from urban scene images. We tackle the problem by
segmenting the images into superpixels, deriving road
relevant features, and constructing a rational feature
model fed into CNN to segment road regions. Fi-
gure 1 displays the architecture of our method. Su-
perpixels are extracted using the Simple Linear Itera-
tive Clustering (SLIC) algorithm (See Sec.3.1). The
main features extracted from the superpixels are co-
lour, texture, location and histogram of gradients (See
Sec.3.4). The applied Convolutional neural network
(CNN) model used to segment road and non-road
parts is described in Sec. 3.5.
3.1 Superpixel Extraction
Superpixel segmentation methods partition an image
into homogeneous regions. Comparing to pixels, su-
perpixels are perceptually more meaningful (Ren and
Malik, 2003). Two main benefits of well extracted su-
perpixel properties, that encourage us to choose them
as basic units in our approach, are described as fol-
lows:
• Accuracy. Well segmented superpixels can store
more compact information about the color, tex-
ture, etc. and they are less ambiguous and sensi-
tive to noise than features extraction at pixel level.
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
258

Output
Handcrafted
Local
Descriptor
CNN
Input
Original image
Superpixel Segmentation
overlaid with lattice
Figure 1: The Proposed SP-CNN Architecture: The original image is segmented into superpixels. Then local descriptors for
the superpixels are extracted. The superpixel descriptors are assigned to the respective node in the lattice projection and are
fed into a CNN to classify the superpixel according to the semantic categories.
They can preserve the object structures and adjust
well to the object contours.
• Efficiency. Dealing with millions of pixels and
their parameters in large systems can be costly,
whereas using superpixels can greatly reduce the
model complexity and computation cost especi-
ally for real time systems.
On the one hand, using regular superpixel seg-
mentation (superpixels are arranged in a grid struc-
ture) methods can preserve the topology. Howe-
ver,regularity mostly inhibits maximum homogeneity
of the ’texture’ inside each superpixel. On the ot-
her hand using irregular superpixel segmentation met-
hods result in different sizes and irregularly shaped
boundaries which are not directly applicable as in-
put data for a convolutional network. Therefore, a
regular topology is needed to convolve the input data
with kernels, and irregular superpixels need to be ”re-
aligned” such that a proper input into a convolutional
network is possible.
3.2 Original SLIC Method
We used SLIC algorithm (Achanta et al., 2010) for
superpixel segmentation. SLIC initiates with equally-
sized superpixels arranged in a grid structure. The
similarity between pixels is calculated based on two
criteria: spectral similarity and spatial proximity that
enforces compactness and regularity in the superpixel
shapes. The main idea of this approach is to limit the
search space to a region proportional to the desired SP
size which reduces considerably the calculation time.
Superpixels grow by measuring the (spectral-spatial)
distance between each pixel to its cluster center and
then update the cluster centers based on K-means al-
gorithm. Input parameters of this method are input
images with N pixels, a desired number of approx-
imately equally-sized superpixels K and a weighted
distance m that combines spectral and spatial prox-
imity to control the compactness of the superpixels.
The superpixels are initiated with roughly equal size
of S =
p
N/K and the spatial extent of any superpixel
is approximately in S
2
neighborhood.
SLIC only computes distances from each cluster
center to pixels within 2S × 2S area that assures us
pixels that are associated with this cluster center lie
within a 2S × 2S area around the superpixel center on
the xy plane and not farther.It leads to reduction of
complexity and distance computations and indepen-
dence from the number of superpixels (Achanta et al.,
2010).
For K desired superpixel each cluster centers are
specified with a 5D vector. C
i
= [l
i
,a
i
,b
i
,x
i
,y
i
] with
i = [1,K] at regular grid intervals S. Distance measu-
rement for the pixels nearest to each cluster center is
based on measuring the Euclidean distances in CIE-
LAB color space and spatial pixel distances, howe-
ver inconsistency in clustering behavior for different
superpixel sizes should be controlled (m in Eq.3.1).
Larger m resulting superpixels are more compact and
smaller m aimed better segmentation but more irregu-
lar size and shape. Euclidean distances in CIELAB
color space are visually meaningful for small distan-
ces. Outweighing pixel color similarities (m) prevents
the spatial pixel distances from exceeding this percep-
tual color distance limit. Hence, instead of using a
Superpixel-based Road Segmentation for Real-time Systems using CNN
259

Figure 2: Super-Pixel Segmentation (After) Enforcement Connectivity.
simple Euclidean distance in the 5D space, distance
measure D
s
from each pixel K to the cluster center i
defined as follows:
d
color
=
q
(l
k
− l
i
)
2
+ (a
k
− a
i
)
2
+ (b
k
− b
i
)
2
d
Spatial
=
q
(x
k
− x
i
)
2
+ (y
k
− y
i
)
2
D
s
= d
color
+
m
S
d
Spatial
(3.1)
where D
s
is the sum of the lab color space dis-
tance and the xy spatial distance normalized by the
grid interval S. After superpixel segmentation, SLIC
uses a method to enforce all superpixels to be con-
nected and prevent too small areas or any islands or
disconnected area. This method leads to non constant
numbers of created superpixels making them unsuita-
ble as direct CNN input model. This inconsistency in
number of created superpixel would cause trouble for
our proposed approach. To prevent this problem, we
used a modified version of SLIC. This version chan-
ges the connectivity enforcement algorithm provided
by SLIC to keep the number of superpixels constant.
This help us to provide the same size of input data for
our network while keep the strength of SLIC method
for having almost homogeneous superpixels.
3.3 Adapted SLIC Method
In the modified version, we perform following steps
for each superpixel. First we find the whole adjacent
superpixels, and the label-connected components in
2-D for each superpixel. Then if a certain superpixel
has more than one segment with the same label, we
keep the larger one and merge the rest into the nea-
rest superpixel which is picked up from neighborhood
The nearest superpixel is computed based on eucli-
dean distance between the center of sub-segment to
the center of each adjacent segment. Contrary to the
original version we do not remove any too small re-
gion with only one label-connected area.
The necessity to having a regular topology to be
able to convolve the input data with kernels, motiva-
ted us to propose a superpixel lattice projection. The
lattice is centered in the rectangular structure extrac-
ted from the first iteration of SLIC method (defined by
the centers of the superpixels). This grid is directly
used to establish a regular topology for the final su-
perpixels, i. e. the superpixels generated by the last
iteration step.
Figure 3: Superpixel segmentation before and after enforce
connectivity. It embeds disconnected superpixels into the
nearest neighburhood.
3.4 Feature Selection
Feature selection acts as a preprocessing step that ena-
bles us to model relevant object characteristics in the
image. We tested different combinations of features
and decided on a particular combination, which gives
the best performance. We considered three different
feature groups.
Color Feature. It probably is one of the most infor-
mative features often applied by the human visual sy-
stem for object and scene image classification. We
used different color spaces RGB, Lab, HSV and com-
puted the average values of all pixels within each su-
perpixel for each color channel separately. Defining
descriptors in different color spaces usually improves
the description of object and texture image categories
(Verma et al., 2010). They are more robust against
image variations such as lighting changes, rotation,
and occlusions (Burghouts and Geusebroek, 2009).
Position Feature. Generally, road area can be de-
tected from its surroundings based on the color fea-
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
260

ture, however the appearance of shadows or similar
pattern to the roads like sidewalks, leads to the rela-
tively difficult adequate prediction. As the color to
class distribution may vary for different positions and
road is typically located in the bottom, we considered
”position” as a second type of representative feature
addition to the color feature. The average of vertical
coordinates of pixels in each superpixel is selected as
the location feature.
Local Binary Pattern (LBP). Some local informa-
tion like texture and shape can contribute to object
and scene image classification. Investigation of our
images represent significant changes between the tex-
ture of a road and its surroundings, especially compa-
red to houses and trees. Roads tend to be flat and
smooth, whereas trees and houses have more com-
plex and compound textures. We use Local Binary
Patterns (LBP)(Ojala et al., 1994) to computes corre-
lation and disparity among pixels inside each super-
pixel. LBP showed to be promising for recognition
and classification of texture images.
For each superpixel a high dimensional feature
descriptor is defined. Each of the image descriptors
comprises 69 image features consisting of 9 color, 1
position and 59 LBP. This provides for high accuracy
and reliability. The provided data model is fed to a
simple convolutional network presented in the follo-
wing.
3.5 Network Architecture and Choice of
Hyper-parameters
Contrary to most state of the art CNN-based se-
mantic segmentation approaches, our proposed met-
hod does not require a complex network architec-
ture to handle large image context, due to the pre-
segmentation which improves computational time.
Our proposed network structure consists of two con-
volutional layers, two fully connected layers and one
drop-out layer with non-linear activation function af-
ter each convolutional and fully connected layer. The
input of our method is defined by the superpixel lat-
tice (See Sec.3.1) on each image with size of H/S and
W /S,where S is initial superpixel size and W, H are
image width and hight. The output is a set of three
numbers to indicate which of the three classes of the
road, non-road or un-labeled they belong to. We ex-
plain them more in detail in Sec. 4
The weights in the fully connected layers as well
as the weights of the convolution masks are initiali-
zed randomly with setting bias to zero. Softmaxlog
is used as loss function and optimization is done with
stochastic gradient descent. The learning rate and all
other hyper-parameters are optimized on a validation
set (learning rate is set to 0.1 × 10
−4
, and weight de-
cay is set to 0.0001). We used momentum 0.9 and
mini-batches of size 50. All of the above parameters
are empirically set to achieve a reasonably good re-
construction loss and error rate and are held constant
across all datasets.
4 EXPERIMENTS AND RESULTS
We evaluate our method using two widely-used chal-
lenging datasets comprising urban scenarios, i.e.,
the KITTI (Fritsch et al., 2013) and the Cityscapes
(M. Cordts, 2016) datasets. In the following we give
a brief description of the datasets followed by the eva-
luation results.
Figure 4: Road segmentation result from official KITTI test
set in baseline and bird eye view perspectives. Here, red
denotes false negatives, blue is false positives and green re-
presents true positives.
4.1 Datasets
KITTI Dataset
KITTI Road Estimation data set comprises 502 8-
bits RGB images splits in train, validation and test
sets with ground truth label for three semantic clas-
ses. KITTI is one of the most popular datasets for
road segmentation in urban scene applications. The
training set has 289 images (95 images with urban
markings (UM), 96 images with multiple urban mar-
kings (UMM) and 98 images where the street has
no urban markings (UU). The test set has 290 ima-
ges including (96 UM, 94 UMM and 100 UU) ima-
ges. The image dimensions vary with the width
lying in [1226, 1238,1241,1242] and their height in
[370,374, 375,376]. We selected 20% of train set
images from 3 different categories UM,UMM,uu for
the validation set. These images are completely from
different video sequences which are not part of the
train set.
For KITTI dataset experiment, we chose SLIC pa-
rameters K = 400,m = 35 resulting in 396 superpixels
in each image projected to a 11 × 36 lattice for CNN
input.
Superpixel-based Road Segmentation for Real-time Systems using CNN
261

Cityscape Dataset
Cityscapes is another new dataset for scene under-
standing in urban environments (M. Cordts, 2016),
comprising pixel-wise ground truth label for nineteen
semantic categories including road, car, pedestrian,
bicycle, etc. The dataset contains 2975 training, 500
validation, and 1525 test images. All of the images in
this dataset are in the same size of 1024 ×2048 pixels.
For evaluation, we report our results on the validation
set. In this paper we focused only on road segmenta-
tion. Therefore we changed all labels except road to
background’s label and evaluated our approach only
for road segmentation.
Experiment on Cityscape is done by choosing SLIC
parameters K = 2000,m = 10 on half resolution ima-
ges resulting in 2048 superpixels for each image and
projected to a 32 ×64 lattice as the input data to CNN.
4.2 Evaluation Results
For training and testing we used the following har-
dware specifications, CPU: Intel(R) Core(TM) i7-
4790K @4GHz. The feature vectors extracted from
superpixels were normalized by mean and standard
deviation for each channel before fed into the CNN.
For this, mean and standard deviation was computed
on the training set and applied for both, training and
evaluation. Our original task was to segment road
from non-road (background). We have evaluated the
potential of the proposed approach based on its accu-
racy in two domains. These are the accuracy on the
native pixel gird and the super pixel grid evaluated on
the image perspective and a birds eye projection pro-
vided by KITTI dataset (Sec.4.1). For evaluation in
the superpixel domain, the ground truth for each Su-
perpixel is defined based on the majority pixel-labels
inside the superpixel. If the majority reaches less then
80% we assigned new label named Un-labeled to our
class labeling, yielding three classes in total: road,
non-road, unlabeled.
Figure 5: Road segmentation with SP-CNN for two sam-
ples: the first horizontal row shows input images. Ground-
truth based on pixels and superpixels are shown in the se-
cond and third lines.The last row shows the predicted results
based on superpixel labeling.
Figure 6: Wrong-predicted area is shown as non-red super-
pixels.
Evaluation on Image Perspective. We followed
the evaluation scheme presented in the KITTI dataset
(See (Fritsch et al., 2013)). The ground truth for the
test data of the KITTI data set is not publicly availa-
ble, hence we used the validation set to be able to eva-
luate our approach on the image perspective. Table 1
shows the average evaluation results on the validation
set for all urban categories in KITTI , and cityscape
regarding to both superpixel and pixel ground-truths
using proposed model and parameters as described in
sections 3 and 3.5. We consider road as the posi-
tive class and non-road and un-labeled as the negative
class.
Figure 5 shows two representative results. Whilst
street is nicely segmented, there are a few false de-
tections on the road border. The more detailed view
in figure 6 reveals that they originate mostly from in-
accurately formed superpixels, which stayed to com-
pact in this scenario rather than clinging to the road
border. Further, one superpixel was fooled by a
shadow covering the street. These deficiencies are re-
solved by a refinement step which is not covered in
the current paper.
We compared our results by the idea of fitting the
super pixels to a prefixed size of super pixels (Patch).
To do so, we first segmented all images in KITTI data-
set with the same number of irregular superpixel seg-
mentation (396 SP for each image) and then extracted
the proposed feature vector from each patch. Table 2
summarized the experiment results. Small difference
of around 5% between the overall F-measurement in
both cases, happened due to the high correctness of
the non-road segmentation, whereas a large gap of al-
most 14% of average precision emphasizes the low
ability of the road segmentation in patch-wise met-
hod. This gets even worse by existing shadow or ob-
stacle on the road surface (See Figure:7).
The idea of using resized image as an input mo-
del instead of feeding with super-pixels would have
two drawbacks. First, you loose more information by
decreasing the resolution which makes the prediction
worse specially for images with shadow on the road
or distinguishing road from sidewalks. Especially if
you want to reach the small size of 11x36 of projected
lattice. Secondly, our final aim is not only segmenta-
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
262
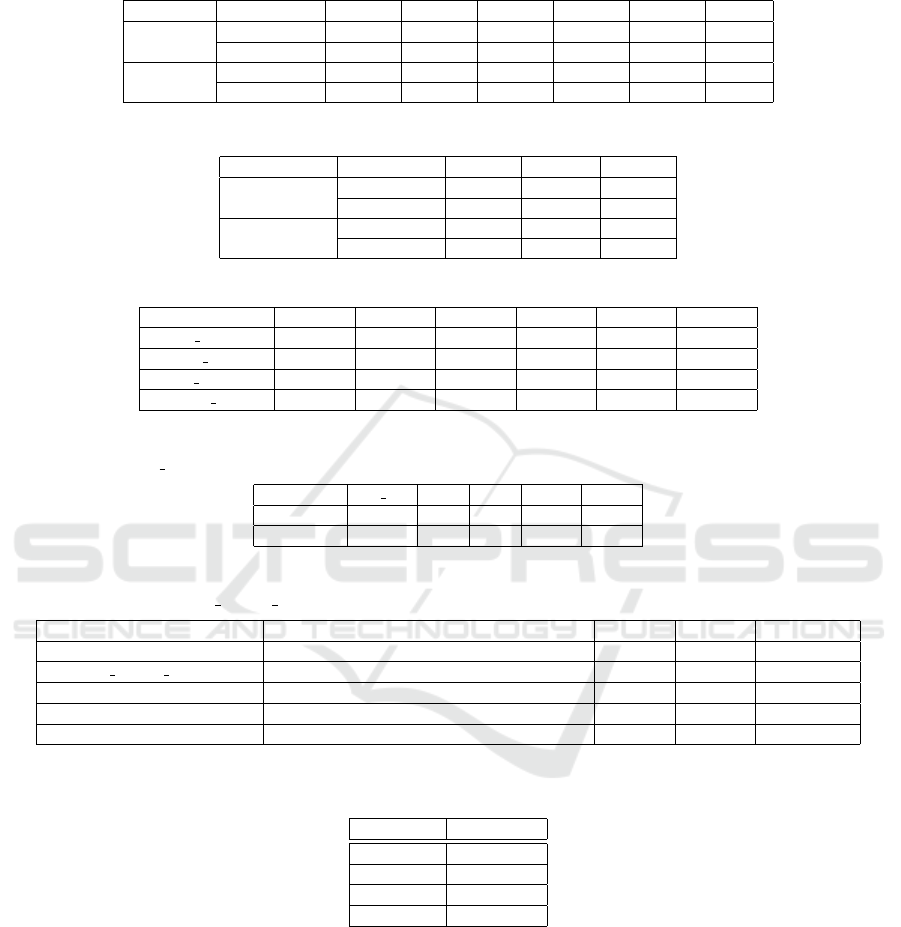
Table 1: Evaluation Results on KITTI and Cityscape validation sets.For the evaluation of the following experiments we used
these metrics: accuracy (ACC), F-measure (MaxF), precision (PRE), recall (REC), false positive rate (FPR), false negative
rate (FNR).
Dataset Benchmark ACC MaxF PRE REC FPR FNR
KITTI
Superpixel 97.37% 92.57% 94.21% 91.62% 5.79% 1.86%
pixel 96.50% 90.08% 92.80% 88.07% 7.20% 2.65%
CityScape
Superpixel 95.75% 92.44% 89.08% 96.76% 10.92% 1.14%
pixel 94.10% 90.01% 84.41% 97.14% 15.59% 1.89%
Table 2: Evaluation results on both regular and irregular shape of superpixels on KITTI validation set.
Method Benchmark MaxF PRE REC
Fixed-size SP
Superpixel 87.52% 80.46% 98.07%
pixel 85.19% 78.85% 94.70%
irregular AP
Superpixel 92.57% 94.21% 91.62%
pixel 90.08% 92.80% 88.07%
Table 3: Evaluation Results on KITTI Test set.
Benchmark MaxF AP PRE REC FPR FNR
UM ROAD 81.60 % 69.62 % 78.13 % 85.40 % 10.89 % 14.60 %
UMM ROAD 85.07 % 79.86 % 85.97 % 84.20 % 15.11 % 15.80 %
UU ROAD 78.47 % 65.18 % 74.20 % 83.25 % 9.43 % 16.75%
URBAN ROAD 82.36 % 72.31 % 80.48 % 84.33 % 11.27 % 15.67 %
Table 4: CPU-based Computational Run-Time in seconds per frame for both KITTI and City-scape image resolution: 1)num-
ber of superpixels(No SP) 2)superpixel segmentation(SP),3)Feature Extraction(FE), and 4)Network (CNN).
Dataset No SP SP FE CNN Total
KITTI 396 0.2s 0.2s 0.01s 0.41s
CityScape 2048 0.3s 0.6s 0.2s 1.1s
Table 5: Kitti road benchmark results (in %) on urban road category. only results of published methods are reported. LODNN:
(Caltagirone et al., 2017), UP CONV POLY (Oliveira et al., 2016), DDN (Mohan, 2014).
Method Processor MaxF AP Runtime(s)
LODNN NVIDIA GTX980Ti GPU, 6GB memory 94.07 % 92.03% 0.018
UP CONV POLY NVIDIA Titan X GPU. 93.83 % 90.47 0.083
DDN NVIDIA GTX980Ti GPU, 6GB memory 93.43 % 89.67 % 2
Ours (un-Optimized runtime) Intel(R) Core(TM) i7-4790K CPU @4GHz 82.36 % 72.31 % 0.41
Ours (Optimized runtime) Intel(R) Core(TM) i7-3770 CPU @ 3.40GHz 82.36 % 72.31 % 0.019
Table 6: Intersection of union(IoU) results for road class on Cityscapes testing set. CRF-RNN (Zheng et al., 2015), Deep-Lab
(Chen et al., 2016), FCN (Long et al., 2015).
Method road (IoU)
DeepLab 97.9%
FCN 97.4%
CRF-RNN 96.3%
Ours 90.08%
tion road but also more objects in the images which
are currently out of scope of this paper. Resizing of
the image is not a suitable solution to segment small
object like vehicle, pedestrian, etc. Even if you do
this resizing via the down/up sampling you put much
effort on computational time.
Evaluation on Birds Eye Perspective. For evalu-
ation in birds-eye perspective in the KITTI bench-
mark the images are projected on the ground plane
via the known camera geometry. The projection is re-
sampled into a regular grid to provide the final image
for pixel-wise comparison (Sec.4.1).
We expected the accuracy to drop compared to the
image perspective evaluation, as the error induced by
inaccurate superpixels on the road border (as menti-
oned above) spreads over a much larger region due
to the ground projection. Table 3 shows the results
which are split into the different road types (UM,
UMM, UU, URBAN). The accuracy dropped as ex-
pected. We can observe the mentioned projection ef-
fect on the example results depicted in Figure 4.
Superpixel-based Road Segmentation for Real-time Systems using CNN
263

Figure 7: Road segmentation prediction with SP-CNN for
two samples based on: a) fixed-size superpixels (Patches),
b) irregular superpixels.
Cityscape Evaluation. We first evaluate our ap-
proach on Cityscape validation set. The results are
collected in Table 1. Since, the publicly available
Cityscape benchmark evaluates 19 classes, compari-
son of the average result between our approach (with
only road class) and the state of art methods is not
fair. Therefore, we compare Per-class scores on Ci-
tyscapes testing set. Table 6 presents the results
of intersection-over-union metric (IOU) (M. Cordts,
2016) for some of latest approaches on Cityscape.
Although, we achieved lower performance among the
state of art methods, but it is still comparable while
achieved impressive low computational time.
Runtime. Most of the state of the art methods in
semantic segmentation are based on GPU and power-
ful hardware facilities which limit their application to
CPU based embedded systems. Our approach using
superpixels and simple CNN network aimed real-time
performance, which reduces the computational com-
plexity to ease the integration of proposed method
into ADAS and autonomous driving systems. We eva-
luated the computational time for both KITTI and Ci-
tyscape datasets in both train and test time. Experi-
ments conducted on KITTI ROAD dataset required
only 4.3s training time per epoch for one image (see
Sec. 3.5). For testing it achieved the total run-time
of 0.41s per image including SP segmentation(0.2s),
Feature extraction(LBP 0.2s + position 0.002s) and
CNN(0.009s) based on CPU specification and Mat-
lab implementation without any parallel processing
(Sec.4.2). For the preprocessing steps (superpixel
segmentation and feature extraction), we used non
optimized Matlab implementations for experimental
reasons. However, runtime optimized versions for
superpixel segmentation in CPU processor (Neubert,
2015) reach a performance of 0.008s for an image
segmentation into 400 superpixels. Further, an op-
timized version for LBP feature extraction (L
´
opez
et al., 2014) can reach 0.001s. Using both bears
the potential to squeeze the total runtime to 0.019s,
which is very fast for semantic segmentation without
no usage of GPU and thus, allows for embedding
in real time systems. In Table 5 we compared our
approach with some of the state of the art methods
in semantic segmentation in both accuracy and com-
putational time. All results provided in KITTI UR-
BAHN ROAD test set. Although, the state-of-the-
art method (Caltagirone et al., 2017) have a run-time
0.018s, but their method implemented in torch and
uses NVIDIA GTX980Ti GPU with 6GB memory,
which is quite fast processor, whereas the proposed
method uses 4core CPU. The reasoning of low eva-
luated MaxF of the proposed approach which is hap-
pened due to the evaluation on Birds Eye Perspective
4.2 could be improved by a post processing step up to
the 96% for KITTI and 94% for cityscape dataset that
is out of scope of this paper.
To sum up, we can emphasize this point that our
approach is compatible for real-time systems with
a reasonable trade-off between accuracy and timing
cost based on very cheap hardware facilities that make
it very fast in both training and testing parts.
5 CONCLUSION AND FUTURE
WORKS
We have presented a superpixel-based convolutional
neural network for road segmentation. Our main goal
focuses on a strategy to reduce the runtime for a pixel-
wise classification while still achieving a high level of
accuracy to make our approach suitable for deploy-
ment on embedded devices for ADAS applications.
The core idea is to use superpixel units instead of
pixel units as input for a CNN. The proposed method
projects a superpixel segmentation on a regular lat-
tice structure to preserve the topology and allow for
convolution operations. The object characteristics are
extracted from almost homogeneous and irregular-
shaped superpixel units. Evaluation show promising
accuracy and efficiency in segmentation tasks and sig-
nificantly reduces the required number of predictions
in runtime. This proposed superpixel-wise mecha-
nism can be applied not only for road segmentation
but also for semantic understanding of general ob-
jects. Future work will initially focus to eliminate
the limitation introduced by the so far non-revisable
decision of the superpixel segmentation, especially at
the road boundary. This might be done by a post pro-
cessing refinement of either all border superpixels or
those marked by the CNN via an attention control.We
further plan to improve the discrimination of the road
pattern in special examples with challenging condi-
tions; such as shadow on road surface, illumination
changes or similarity with neighboring patterns like
sidewalks. It is also promising to evaluate this ap-
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
264

proach for more than 2 classes and extend the pixel-
wise classification to different objects such as side-
walks,lane, traffic sign, vehicles, etc.
REFERENCES
Achanta, R., Shaji, A., Smith, K., Lucchi, A., Fua, P., and
S
¨
usstrunk, S. (2010). Slic superpixels. Technical re-
port.
Burghouts, G. J. and Geusebroek, J.-M. (2009). Perfor-
mance evaluation of local colour invariants. Computer
Vision and Image Understanding, 113(1):48–62.
Caltagirone, L., Scheidegger, S., Svensson, L., and Wa-
hde, M. (2017). Fast lidar-based road detection
using convolutional neural networks. arXiv preprint
arXiv:1703.03613.
Chen, L.-C., Papandreou, G., Kokkinos, I., Murphy, K., and
Yuille, A. L. (2014). Semantic image segmentation
with deep convolutional nets and fully connected crfs.
arXiv preprint arXiv:1412.7062.
Chen, L.-C., Papandreou, G., Kokkinos, I., Murphy, K., and
Yuille, A. L. (2016). Deeplab: Semantic image seg-
mentation with deep convolutional nets, atrous con-
volution, and fully connected crfs. arXiv preprint
arXiv:1606.00915.
Ciresan, D., Giusti, A., Gambardella, L. M., and Schmid-
huber, J. (2012). Deep neural networks segment neu-
ronal membranes in electron microscopy images. In
Advances in neural information processing systems,
pages 2843–2851.
Farabet, C., Couprie, C., Najman, L., and LeCun, Y.
(2013). Learning hierarchical features for scene labe-
ling. IEEE transactions on pattern analysis and ma-
chine intelligence, 35(8):1915–1929.
Fritsch, J., Kuehnl, T., and Geiger, A. (2013). A new per-
formance measure and evaluation benchmark for road
detection algorithms. In International Conference on
Intelligent Transportation Systems (ITSC).
Gadde, R., Jampani, V., Kiefel, M., Kappler, D., and Gehler,
P. V. (2016). Superpixel convolutional networks using
bilateral inceptions. In European Conference on Com-
puter Vision, pages 597–613. Springer.
Ganin, Y. and Lempitsky, V. (2014). Nˆ 4-fields: Neural
network nearest neighbor fields for image transforms.
In Asian Conference on Computer Vision, pages 536–
551. Springer.
Girshick, R., Donahue, J., Darrell, T., and Malik, J. (2014).
Rich feature hierarchies for accurate object detection
and semantic segmentation. In Proceedings of the
IEEE conference on computer vision and pattern re-
cognition, pages 580–587.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resi-
dual learning for image recognition. In Proceedings of
the IEEE Conference on Computer Vision and Pattern
Recognition, pages 770–778.
He, S., Lau, R. W., Liu, W., Huang, Z., and Yang, Q. (2015).
Supercnn: A superpixelwise convolutional neural net-
work for salient object detection. International Jour-
nal of Computer Vision, 115(3):330–344.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012).
Imagenet classification with deep convolutional neu-
ral networks. In Advances in neural information pro-
cessing systems, pages 1097–1105.
LeCun, Y., Bengio, Y., and Hinton, G. (2015). Deep lear-
ning. Nature, 521(7553):436–444.
Long, J., Shelhamer, E., and Darrell, T. (2015). Fully con-
volutional networks for semantic segmentation. In
Proceedings of the IEEE Conference on Computer Vi-
sion and Pattern Recognition, pages 3431–3440.
L
´
opez, M. B., Nieto, A., Boutellier, J., Hannuksela, J., and
Silv
´
en, O. (2014). Evaluation of real-time lbp com-
puting in multiple architectures. Journal of Real-Time
Image Processing, pages 1–22.
M. Cordts, M. Omran, S. R. T. R. M. E. R. B. U. F. S. R.
B. S. (2016). The cityscapes dataset for semantic ur-
ban scene understanding. In Proc. of the IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR).
Mohan, R. (2014). Deep deconvolutional networks for
scene parsing. arXiv preprint arXiv:1411.4101.
Neubert, P. (2015). Superpixels and their application for
visual place recognition in changing environments.
Ning, F., Delhomme, D., LeCun, Y., Piano, F., Bottou, L.,
and Barbano, P. E. (2005). Toward automatic phe-
notyping of developing embryos from videos. IEEE
Transactions on Image Processing, 14(9):1360–1371.
Ojala, T., Pietikainen, M., and Harwood, D. (1994). Perfor-
mance evaluation of texture measures with classifica-
tion based on kullback discrimination of distributions.
In Computer Vision & Image Processing, pages 582–
585. IEEE.
Oliveira, G. L., Burgard, W., and Brox, T. (2016). Efficient
deep models for monocular road segmentation. In
Intelligent Robots and Systems (IROS),, pages 4885–
4891. IEEE.
P. Sermanet, D. Eigen, X. Z. M. M. R. F. Y. L. (2013).
Overfeat: Integrated recognition, localization and de-
tection using convolutional networks. arXiv preprint
arXiv:1312.6229.
Ren, X. and Malik, J. (2003). Learning a classification mo-
del for segmentation. In ICCV, volume 1, pages 10–
17.
Schmidhuber, J. (2015). Deep learning in neural networks:
An overview. Neural networks, 61:85–117.
Simonyan, K. and Zisserman, A. (2014). Very deep con-
volutional networks for large-scale image recognition.
arXiv preprint arXiv:1409.1556.
Verma, A., Banerji, S., and Liu, C. (2010). A new color sift
descriptor and methods for image category classifica-
tion. In International Congress on Computer Applica-
tions and Computational Science, pages 4–6.
Zheng, S., Jayasumana, S., Romera-Paredes, B., Vineet, V.,
Su, Z., Du, D., Huang, C., and Torr, P. H. (2015). Con-
ditional random fields as recurrent neural networks. In
Proceedings of the IEEE International Conference on
Computer Vision, pages 1529–1537.
Superpixel-based Road Segmentation for Real-time Systems using CNN
265
