
Statistical Measures from Co-occurrence of Codewords
for Action Recognition
Carlos Caetano, Jefersson A. dos Santos and William Robson Schwartz
Smart Surveillance Interest Group, Department of Computer Science,
Universidade Federal de Minas Gerais, Belo Horizonte, Brazil
Keywords:
Spatiotemporal Features, Co-occurrence, Action Recognition.
Abstract:
In this paper, we propose a novel spatiotemporal feature representation based on co-occurrence matrices of
codewords, called Co-occurrence of Codewords (CCW), to tackle human action recognition, a significant
problem for many real-world applications, such as surveillance, video retrieval and health care. The method
captures local relationships among the codewords (densely sampled), through the computation of a set of
statistical measures known as Haralick textural features. We apply a classical visual recognition pipeline in
which involves the extraction of spatiotemporal features and SVM classification. We investigate the proposed
representation in three well-known and publicly available datasets for action recognition (KTH, UCF Sports
and HMDB51) and show that it outperforms the results achieved by several widely employed spatiotemporal
features available in the literature encoded by a Bag-of-Words model with a more compact representation.
1 INTRODUCTION
Human action recognition has been used in many real-
world applications. In environments that require a
higher level of security, surveillance systems can be
used to detect and prevent abnormal or suspicious ac-
tivities such as robberies and kidnappings. In addi-
tion, action recognition can be used in systems for
video retrieval, this way an user could search for
videos from the actions performed on it.
Considering only surveillance applications, such
systems have traditionally relied on network cameras
monitored by a human operator that must be aware of
the actions carried out by people who are in the cam-
eras field of view. With the recent growth in the num-
ber of cameras to be analyzed, the efficiency and ac-
curacy of human operators has reached its limit (Ke-
val, 2006). Therefore, security agencies have at-
tempted computer vision-based solutions to replace
or assist the human operator. In view of that, auto-
matic recognition of suspicious activities is a problem
that has attracted the attention of researchers in the
area (Danafar and Gheissari, 2007; Xiang and Gong,
2008; Reddy et al., 2011; Wiliem et al., 2012).
Over the last decade, a significant portion of
the progress in human action recognition has been
achieved due to the design of novel discriminative lo-
cal feature descriptors followed by a Bag-of-Words
(BoW) model (Sivic and Zisserman, 2003) encod-
ing. In general, such representations are based on spa-
tiotemporal feature descriptors employed on the video
domain (Krig, 2014).
The feature extraction process is very important
since it is responsible for describing the video con-
tents. These representations must be rich enough
to allow proper recognition. To that end, local spa-
tiotemporal features are the most popular descriptors
for extracting information based on gradients or on
motion analysis (Poppe, 2010). With such features
extracted, usually, a codification is applied as an inter-
mediate representation. The BoW model (Sivic and
Zisserman, 2003) is the most common approach used
to encode the features extracted from the videos. Such
approach represents videos as histograms constructed
from a set of visual features, known as visual dictio-
naries or codebooks. Finally, the intermediate repre-
sentation is presented to a classification step to learn a
function that can assign discrete labels to the videos.
Nowadays deep learning techniques, such as Con-
volutional neural networks (CNNs), have become a
growing trend in computer vision. Such approaches
are based on the employment of deeper and more
complicated networks with a high number of param-
eters aiming to achieve higher accuracy. Nonethe-
less, most works forget that real world applications
that involves recognition tasks such as robotics, self-
Caetano, C., Santos, J. and Schwartz, W.
Statistical Measures from Co-occurrence of Codewords for Action Recognition.
DOI: 10.5220/0006615803010308
In Proceedings of the 13th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2018) - Volume 5: VISAPP, pages
301-308
ISBN: 978-989-758-290-5
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
301
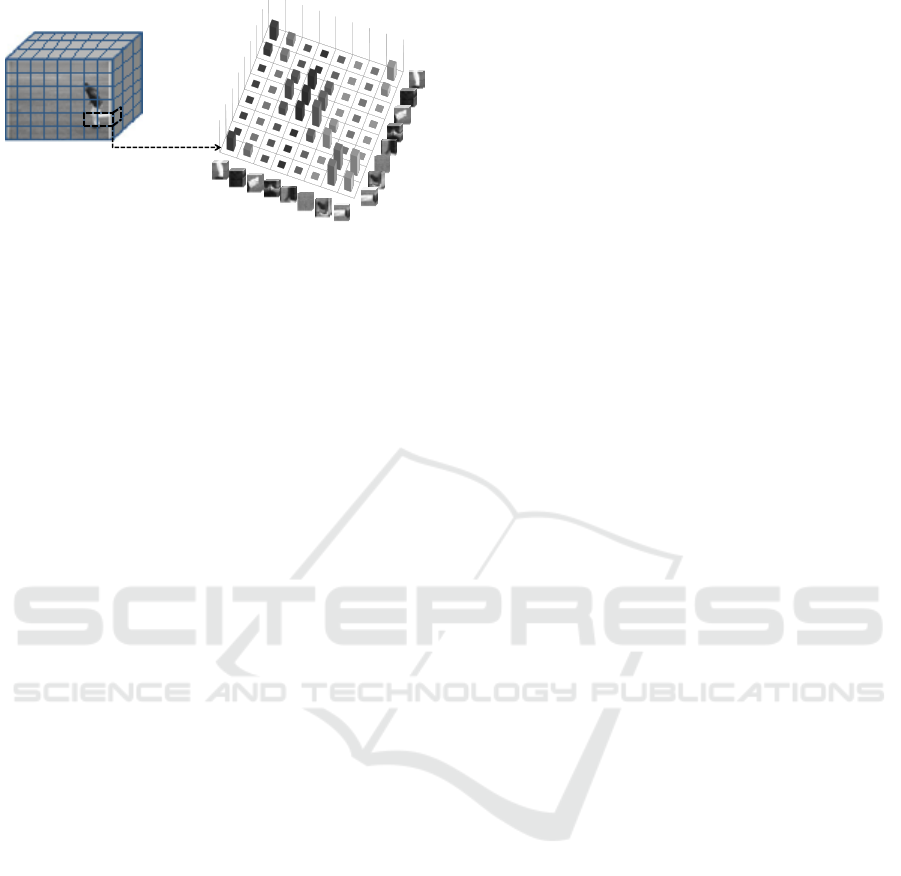
(a) Cuboids
(features)
(b) Codeword
co-occurrence matrix
d =1 and π = 0°
Figure 1: Creation a co-occurrence matrix from feature
codewords. For this example, the comparison between pairs
of cuboids is performed considering a 0
◦
(horizontal) near-
est neighbor with distance d = 1 (for more details, see Sec-
tion 3). (a) Set of cuboids (features) densely extracted over
the video. (b) Co-occurrence matrix computed from the fea-
ture codewords.
driving car and augmented reality, are usually exe-
cuted on platforms with limited resources (Howard
et al., 2017). Moreover, since the number of param-
eters is very large, they depend on heavy processing
to converge. In addition, these networks need many
labeled samples to learn, which is not always easily
obtained in same applications. Because of these limi-
tations, non-deep visual feature representation strate-
gies are still needed.
Recently, a promising spatiotemporal local feature
descriptor called Optical Flow Co-occurrence Matri-
ces (OFCM) (Caetano et al., 2016) was developed.
The method extracts a robust set of measures known
as Haralick features to describe the flow patterns by
measuring meaningful properties such as contrast, en-
tropy and homogeneity of co-occurrence matrices to
capture local space-time characteristics of the motion
through the neighboring optical flow magnitude and
orientation. OFCM has shown excellent results on
the action recognition problem. Therefore, motivated
by the great results achieved by OFCM, in this paper
we propose a novel spatiotemporal feature representa-
tion called Co-occurrence of Codewords (CCW). The
method is based on co-occurrence matrices derived
from a precomputed codebook.
Our hypothesis for obtaining the CCW represen-
tation is based on the assumption that the information
on a video sequence can be encoded by the spatial
relationship contained on local neighborhoods of the
features. More specifically, we assume that the in-
formation is adequately specified by a set codeword
co-occurrence matrices computed for various angu-
lar relationships at a given offset between neighbor-
ing features. Therefore, matrices obtained by mod-
ifying the spatial relationship (different orientations
or distances between features) will capture different
information. Figure 1 illustrates the CCW represen-
tation computed based on the feature codewords pro-
vided by a pre-computed codebook for an horizontal
displacement of a single cuboid (feature).
Given the aforementioned description of CCW,
we consider three variations of the proposed repre-
sentation. The first is based on the extraction of Har-
alick features (Haralick et al., 1973) from codeword
co-occurrence matrices, the second employs a simple
concatenation of the vectorized co-occurrence matri-
ces, and the last combines the two previous variations.
According to the experimental results, the pro-
posed feature representation followed by the SVM
classifier is able to recognize actions accurately on
KTH, UCF Sports and HMDB51 datasets. The
employment of the CCW outperforms the results
achieved by several widely employed spatiotemporal
features available in the literature encoded by a BoW
model (Sivic and Zisserman, 2003) and achieves com-
parable results with OFCM feature descriptor + BoW
showing a more compact representation.
The remainder of this paper is organized as fol-
lows. In Section 2, we briefly review works in liter-
ature that explore co-occurrence to encode informa-
tion. In Section 3, we introduce the novel spatiotem-
poral feature representation called Co-occurrence of
Codewords (CCW). Then, Section 4 presents our ex-
perimental results, validating the high performance of
the CCW feature representation. Finally, Section 5
presents conclusions obtained and future works.
2 RELATED WORK
In this section, we present a brief review of works that
are close to the idea proposed in our approach by em-
ploying co-occurrence to encode information.
In (Zalevsky et al., 2005), the authors used co-
occurrence for motion characterization. Their method
allows the estimation of relative position, scale and
the rotation of objects in the scene to obtain time to
impact and relative distance between objects for nav-
igation and collision avoidance.
The BoW model was improved in (Liu et al.,
2008) by calculating spatial histograms where the co-
occurrences of local features are considered to en-
code spatial relationship as 2
nd
order features. In-
stead of assigning a local feature descriptor to a sin-
gle codeword, one can assign it to the top-N closest
codewords. The main difference between our work
and (Liu et al., 2008) is that we consider the co-
occurrence matrices of feature codewords while their
final representation is composed assigning local fea-
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
302

tures to N closest codewords.
A representation that characterizes photometric
and geometric aspects of an image by computing
co-occurrences of codewords with respect to spatial
predicates over a hierarchical spatial partitioning of
an image was proposed by (Yang and Newsam, 2011).
Our proposed method differs from them since they
combine different co-occurrence matrices with kernel
functions and do not extract Haralick features.
A new image feature based on spatial co-
occurrence among micropatterns was proposed
in (Nosaka et al., 2012). To consider spatial re-
lations, the authors extract co-occurrence matrices
among multiple micropatterns, represented by Local
Binary Pattern (LBP), and applied it to face recog-
nition and texture recognition tasks. Although their
method is similar to our approach, they do not per-
form co-occurrence on codewords and also do not ex-
tract Haralick features from the matrices.
In (Zhang et al., 2014), the co-occurrence was ap-
plied to the person re-identification problem. The au-
thor creates a codeword image in which each pixel
represents the centroid of a patch that has been
mapped to a codeword. The appearance transfor-
mation between camera views is encoded by a co-
occurrence matrix computed by the inner product of
the codeword probe and gallery images in the re-
producing kernel Hilbert space (RKHS). Later, the
authors extended their model to multi-shot scenar-
ios (Zhang and Saligrama, 2017).
The use of co-occurrence was also employed in
action recognition tasks. In (Banerjee and Nevatia,
2011), a Minimum Spanning Tree (MST) based dis-
tance function was used to count the co-occurrence
of Spatio Temporal Interest Points (STIP) (Laptev,
2005) codewords in terms of the edge connectivity of
latent variables of a Conditional Random Field (CRF)
classifier. The latent semantic analysis (LSA) was
applied in (Zhang et al., 2012) to exploit high or-
der co-occurrence by mapping codewords into a co-
occurrence space. In (Sun and Liu, 2013), the authors
model the semantic relationship (spatial and tempo-
ral) of codewords in terms of normalized googlelike
distance (NGLD), which measures the co-occurrence
frequency of each pairwise codewords in the video.
A new representation called directional pairwise fea-
ture (DPF) was proposed by (Liu et al., 2014) which
uses direction instead of distance when describing the
pairwise co-occurrence and also pairwise counts.
Even though the aforementioned methods used
co-occurrence to encode information, they do not
compute co-occurrence matrices considering differ-
ent angles (more details in Section 4) on their de-
scription process. Moreover, as the main difference
6 7 8
5
*
1
4 3 2
0° (0,1)
45° (-1,1)
90° (-1,0)
135° (-1,-1)
Figure 2: Offset configurations with d = 1. Cells 1 and 5
are the 0
◦
(horizontal) nearest neighbors to cell *; cells 2
and 6 are the 135
◦
nearest neighbors; cells 3 and 7 are the
90
◦
nearest neighbors; and cells 4 and 8 are the 45
◦
nearest
neighbors to *. Note this information is purely spatial, and
has nothing to do with pixel intensity values (Haralick et al.,
1973) (Figure from (Caetano et al., 2016)).
between our work and others is that we consider the
co-occurrence of feature codewords and compute the
Haralick features from the co-occurrence matrices as
the final feature vector.
3 PROPOSED APPROACH
Several action recognition approaches, such as (Wang
et al., 2011) and (Wang et al., 2009), are based on
feature extraction followed by a BoW representation
to encode the information extracted from the video.
While those works have demonstrated encouraging
recognition accuracy, a rich source of information
contained in these methods, such as spatial relations
contained on the features, have not been fully ex-
plored.
To explore the local spatial relations contained
of the features, we propose a novel spatiotempo-
ral feature representation, called Co-occurrence of
Codewords (CCW), based on the co-occurrence ma-
trices computed over feature codewords. Such co-
occurrence matrices express the distribution of the
features at a given offset over feature codewords from
a pre-computed codebook, as illustrated in Figure 1.
Our hypothesis to design the CCW representa-
tion is based on the assumption that the information
on a video sequence can be encoded by the over-
all relationship of the feature codewords from a pre-
computed codebook. In addition, we believe that it
can be specified by a set of codeword dependence
matrices computed for various angular relationships
and distances between neighboring codewords on the
video. Once the co-occurrence matrices have been
computed, we extract a set of measures known as Har-
alick textural features (Haralick et al., 1973) to de-
scribe the patterns.
The classical textural feature was proposed by
Haralick et al. (Haralick et al., 1973) and is based on
the gray level co-occurrence matrix (GLCM) which
estimates the joint distribution of pixel intensity given
Statistical Measures from Co-occurrence of Codewords for Action Recognition
303

Video
Cuboids
Co-occurrence matrices
Feature
Extraction
Codebook
Creation
Codewords
Co-occurrence
Haralick features
extraction
Final
Represetation
Features
4
2
1
0
2
4
0
0
1
0
6
1
0
0
1
2
6
0
2
0
0
4
2
0
2
2
2
2
0
0
2
0
2
1
3
0
1
2
1
0
3
1
0
2
0
0
2
0
4
1
0
0
1
2
2
0
0
2
4
1
0
0
1
0
Codewords
Figure 3: Diagram illustrating the pipeline extraction of the proposed spatiotemporal feature representation.
Input video
9
2
0
2
8
0
0
0
8
9
0
8
0
4
0
8
0
3
0
4
0
4
7
0
9
0
2
8
6
4
6
7
9
4
9
9
0°
45°
90°
135°
Quantized cuboid features
Co-occurrence matrices
Input video
Figure 4: Detailed “Codewords Co-occurrence” illustration.
a distance and an orientation. Mathematically, a co-
occurrence matrix Σ is defined over an n × m image I,
at a specified offset (∆
x
, ∆
y
), as
Σ
∆
x
,∆
y
(i, j) =
n
∑
r=1
m
∑
q=1
1, if I(r, q) = i and
I(r + ∆
x
, q + ∆
y
) = j,
0, otherwise
(1)
where i and j are the image intensity values separated
by distance d, r and q are the spatial positions in the
image I and the offset (∆
x
, ∆
y
) depends on the angle π
used. Usually, π is expressed as angles 0
◦
(0, d), 45
◦
(−d, d), 90
◦
(−d, 0) and 135
◦
(−d, −d). Figure 2
illustrates possible offset configurations. Note that in
the proposed method, we do not compute the matri-
ces using the image intensity values, but using quan-
tized features (codewords), as it will be discussed in
the next paragraphs.
Aiming to depict the meaningful properties con-
tained in the co-occurrence matrices, Haralick et al.
introduced 14 statistical measures that can be ex-
tracted from the computed matrices: angular second
moment, contrast, correlation, sum of squares, inverse
difference moment, sum average, sum variance, sum
entropy, entropy, difference variance, difference en-
tropy, two information measures of correlation, and
maximal correlation coefficient.
The process of computing the CCW representa-
tion is illustrated in Figure 3 and will be explained
in details as follows. First, a dense sampling step is
applied to the video dividing it into n
i
× n
j
× n
t
re-
gions. These regions are referred to as cuboids and are
described by their width (n
i
), height (n
j
), and length
(n
t
). With the cuboids at hand, we apply a spatiotem-
poral feature descriptor in order to describe the infor-
mation of each cuboid.
Since the features obtained from the cuboids are
composed by real valued vectors, a quantization step
is applied to compute the co-occurrence matrices.
The feature quantization used is based on a code-
book, or visual dictionary. Let C be a visual code-
book obtained by an unsupervised learning algorithm
(e.g., k-means clustering algorithm). C =
{
c
k
}
, k ∈
{
1, . . . , K
}
, where c
k
∈ R
D
is a codeword and K is the
number of codewords.
Given a video, we compute α co-occurrence ma-
trices for each t frames from the quantized features
according to Equation 1. Here, α is the number of
angles used (π = 0
◦
, 45
◦
, 90
◦
and 135
◦
) and t is ac-
cording to the temporal length of the cuboids. Then,
the co-occurrence matrices are accumulated accord-
ing to its angles. After that, we extract f Haralick
textural features (Haralick et al., 1973) for each co-
occurrence matrix, generating a feature vector with f
dimensions per matrix, where f is the number of ex-
tracted Haralick features. Finally, all feature vectors
are concatenated in X =
{
x
i
}
, i ∈
{
1, ...N
}
, followed
by z score norm as
z
i
=
x
i
− µ
i
σ
i
, (2)
where x
i
∈ R
D
represents each dimension of the con-
catenated vectors and N is the length of α× f , µ
i
is the
mean value of the dimension i and σ
i
is standard devi-
ation of each dimension i. Such process is the “Code-
words Co-occurrence” block shown on Figure 3 and
illustrated with more details in Figure 4.
We also present two variations of the CCW repre-
sentation: (i) a simply concatenation of the vectorized
co-occurrence matrices with no Haralick feature ex-
traction (inspired by the work (Nosaka et al., 2012));
and (ii) a combination of the Haralick features ex-
traction and the concatenation of the vectorized co-
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
304

occurrence matrices. The vectorized matrices can be
seen as an histogram in which each bin is composed
by a pair of features instead of just a single feature.
4 EXPERIMENTS
In this section, we describe the datasets used for the
evaluation as well as the evaluation protocol. We
evaluate the proposed representation and compare it
to a Bag-of-Words based action recognition approach
and to methods of the literature that also employ co-
occurrence to encode information.
4.1 Action Recognition Datasets
KTH is a well-known and publicly available dataset
for action recognition (Schuldt et al., 2004). It con-
sists of six human action classes: walking, jogging,
running, boxing, waving and clapping. Each action is
performed several times by 25 subjects in four differ-
ent scenarios. In total, the data consist of 600 videos
and spatial resolution of 160 × 120 pixels. To obtain
fair comparison, we follow the experimental setup
used by Wang et al. (Wang et al., 2009) and divide
the samples into training/validation set (8 + 8 people)
and test set (9 people). The performance is evaluated
as suggested in (Schuldt et al., 2004), i.e., by report-
ing the average accuracy over all classes.
UCF Sports is a realistic dataset (Rodriguez et al.,
2008) that consists of a set of actions collected from
various sports. It is composed by ten different types of
human actions: swinging (on the pommel horse and
on the floor), diving, kicking (a ball), weight-lifting,
horse-riding, running, skateboarding, swinging (at the
high bar), golf swinging and walking. It consists of
150 video samples with a frame rate of 10 fps and
spatial resolution of 720 × 480 pixels. We use a leave-
one-out setup as suggested by the authors (Rodriguez
et al., 2008). The performance metric used is the av-
erage accuracy over all classes.
HMDB51 (Kuehne et al., 2011) is also a realistic
and challenging activity dataset composed of video
clips from movies, the Prelinger archive, Internet,
Youtube and Google videos, and comprised of 51 ac-
tivity categories. It consists of 6, 766 activity samples
with a resolution of 240 pixels in height with pre-
served aspect ratio. We follow the original protocol
using three train-test splits. The performance is eval-
uated by computing the average accuracy across all
classes over the three splits.
4.2 Experimental Setup
In the interest of a fair comparison, we apply the same
evaluation pipeline as (Wang et al., 2009). It is a
classical visual recognition pipeline in which involves
two phases: training and testing.
In the training phase, we first densely extract
OFCM spatiotemporal feature descriptors (Caetano
et al., 2016)
1
. Dense sampling extracts video blocks
at regular positions in space and time. There are 3 di-
mensions to sample from: n
i
× n
j
× n
t
. In our exper-
iments, the minimum size of a block is 18 × 18 pixels
and 10 frames. Spatial and temporal sampling are per-
formed with 50% of overlapping. Next, following the
visual recognition strategy, the local features must be
encoded into a mid-level representation to be used for
the classification task. However, a visual codebook
must be created before the encoding. Thus, we ran-
domly sample K training features. This is very fast
and according to (Kl
¨
aser et al., 2008) the results are
very close to those obtained using vocabularies built
with k-means. After, for each video sequence, we
extract a Co-occurrence of Codewords (CCW) rep-
resentation. Spatiotemporal features are first quan-
tized into the codewords according to the codebook
previously created and a video is then represented
as 4 co-occurrence matrices (π = 0
◦
, 45
◦
, 90
◦
and
135
◦
). Here, we extract f = 12 Haralick textural fea-
tures: angular second moment, contrast, correlation,
sum of squares, inverse difference moment, sum av-
erage, sum variance, sum entropy, entropy, difference
variance, difference entropy and maximal correlation
coefficient. Then, the feature vectors are assigned to
their closest codeword using Euclidean distance. Fi-
nally, one-against-all classification is performed by a
non-linear Support Vector Machines (SVM) with a
RBF-kernel.
In the testing phase, a new test video sequence is
classified by applying the trained classifier obtained
during the training phase. Thus, for the test video se-
quence, OFCM spatiotemporal feature descriptors are
extracted with dense sampling. Next, the CCW repre-
sentation is generated using the visual codebook pre-
viously created. Then, that feature vector is given as
input to the trained classifier to predict the class label
of the test video sequence.
It is important to emphasize that in the experi-
ments we change only the mid-level representation
used in the pipeline since our main goal is to com-
pare the real contribution of our proposed feature rep-
resentation, i.e., for every experiment, the pipeline is
the same only the feature representation is changed.
1
Although we used OFCM, it is important to emphasize
that any feature descriptors can be used with CCW.
Statistical Measures from Co-occurrence of Codewords for Action Recognition
305

Table 1: Video classification Acc. (%) results of the combined variations of the CCW representation on KTH actions dataset
(Schuldt et al., 2004).
Raw concatenation L
1
norm L
2
norm z score norm
Approach Acc. (%) Acc. (%) Acc. (%) Acc. (%)
Vectorized + CCW + OFCM (k = 4) 72.22 72.22 72.22 91.20
Vectorized + CCW + OFCM (k = 8) 88.58 78.55 78.55 93.06
Vectorized + CCW + OFCM (k = 18) 88.43 81.02 81.02 96.30
Vectorized + CCW + OFCM (k = 32) 87.50 78.55 78.55 94.75
Table 2: A summary of the proposed feature vector lengths of the CCW representation and OFCM + BoW model fine tuned
on KTH actions dataset (Schuldt et al., 2004).
Approach Codewords k Feature length
Published
BoW + OFCM (Caetano et al., 2016) 4000 4000
results
Our
CCW + OFCM (Haralick feature extraction) 28 48
results
CCW + OFCM (Vectorized matrices) 16 1024
CCW + OFCM (Concatenation + z score norm) 18 1344
88
89
90
91
92
93
94
95
96
97
4 6 8 10 12 14 16 18 20 22 24 26 28 30 32
Accuracy
Codewords
CCW + OFCM (Haralick feature extraction)
CCW + OFCM (Vectorized matrices)
CCW + OFCM (Combined z Score)
96.14
96.30
93.83
Figure 5: Accuracy of codebook size variation on KTH
dataset (Schuldt et al., 2004).
4.3 Results and Comparisons
In this section, we present experiments for parameters
optimization and report a comparison of our proposed
feature representation. We used the KTH dataset to
perform parameter setting and then used such param-
eters on UCF Sports and HMDB51 dataset experi-
ments. We focused on the optimization of the number
of codewords K used to quantize the features and also
to create the co-occurrence matrices. We used the op-
timized parameters of the OFCM feature descriptor
for KTH presented in (Caetano et al., 2016).
Figure 5 shows the codewords K variation for
three variations of our proposed feature representa-
tion. For the first one, CCW + OFCM (Haralick fea-
ture extraction), K = 28 presents the best accuracy
value reaching 93.83% with final feature vector length
of 48 (4 co-occurrence matrices × 12 Haralick fea-
tures). Secondly, CCW + OFCM (vectorized matri-
ces), reaches an accuracy of 96.14% with K = 16 and
a final feature vector length of 1024 (4 co-occurrence
matrices × 16 × 16).
We also present experiments with a third variation
of the CCW representation in which is a combination
of the two aforementioned variations. Here, we sim-
ply concatenated the last two presented approaches
(Haralick and Vectorized). For that purpose, we em-
pirically tested four different combination strategies:
a raw concatenation; concatenation followed by L
1
norm; concatenation followed by L
2
norm; and con-
catenation followed by z score norm. For the z score
norm, we learn the means µ
i
and standard deviations
σ
i
of each feature dimension (x
i
) during the training
phase.
Table 1 shows the results of the four combina-
tion strategies with the best result of 96.30% be-
ing achieved by the combined CCW representation
followed by z score norm with K = 18. Figure 5
also illustrates the codewords K variation for CCW +
OFCM (Combined z score). Our method presents a
more compact representation, using just k = 18 code-
words and a final feature vector length of 1344 (4
co-occurrence matrices × (18 × 18) + 48 Haralick
features) when directly compared to the BoW models
used in the literature.
Table 2 summarizes the feature vector lengths for
the proposed CCW and for the BoW representation
length used in the literature (Caetano et al., 2016). We
can see that CCW presents a more compact represen-
tation using fewer codewords and with a smaller final
feature vector length. For instance, CCW + OFCM
(Combined z score) achieves the same accuracy as the
BoW + OFCM using a more compact representation
with just k = 18 codewords and a final feature vec-
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
306

Table 3: Action recognition accuracy (%) results of OFCM + CCW representation and classic spatiotemporal features of the
literature + BoW on KTH (Schuldt et al., 2004) and UCF Sports (Rodriguez et al., 2008) action datasets. Results for HOG,
HOF, HOG/HOF and HOG3D were obtained from (Wang et al., 2009).
KTH UCF Sports HMDB51
Approach Acc. (%) Acc. (%) Acc. (%)
BoW + HOG (Dalal and Triggs, 2005) 79.00 77.40 28.40
BoW + HOF (Laptev et al., 2008) 88.00 84.00 35.50
BoW + HOG/HOF (Laptev et al., 2008) 86.10 81.60 43.60
Published BoW + HOG3D (Kl
¨
aser et al., 2008) 85.30 85.60 36.20
BoW results BoW + MBH (Dalal et al., 2006) 89.04 90.53 51.50
BoW + GBH (Shi et al., 2015)
1
92.70 - 38.80
BoW + OFCM (Caetano et al., 2016) 96.30 92.80 56.91
Dense Trajectories (Wang et al., 2011) 94.20 88.20 46.60
Published
STIP + CRF (Banerjee and Nevatia, 2011) 93.98 - -
co-occurrence results
CS + HOG/HOF (Zhang et al., 2012) 91.20 - 26.82
ST-NGLDC + 3D-SIFT (Sun and Liu, 2013) 91.82 89.74 -
Our
CCW + OFCM (Haralick feature extraction) 93.83 90.53 52.62
results
CCW + OFCM (Vectorized matrices) 96.14 91.33 55.08
CCW + OFCM (Combined) 96.30 91.07 55.25
tor length of 1344, instead of k = 4000 used by the
OFCM + BoW.
We also compare our approach with several clas-
sic local spatiotemporal features + BoW model of
the literature. According to Table 3, CCW + OFCM
(Combined) achieved the higher accuracy value,
which is the same as the BoW + OFCM, reaching
96.30% on KTH dataset. Moreover, we note an im-
provement of 2.10 percentage points (p.p.) on the
KTH dataset, achieved by our representation when
compared to Dense Trajectories method (Wang et al.,
2011). Furthermore, it is important to point out that
their approach uses a combination of three different
feature descriptors (HOG, HOF and MBH), while we
only used the OFCM feature. Although our CCW rep-
resentation did not achieve better results on UCF
Sports and HMDB51 datasets, it still presents com-
parable results being only 1.47 p.p. behind the best
result on UCF Sports and 1.66 p.p. on HMDB51. Fur-
thermore, as already mentioned it is worth emphasiz-
ing that the CCW has a more compact representation
(smaller feature vector length) as shown on Table 2.
A comparison with methods of the literature that
also employed co-occurrence to encode information
on action recognition tasks is shown on the second
part of Table 3. On the KTH dataset, our CCW rep-
resentation (Vectorized and Combined) achieves an
improvement of 2.32 p.p. when compared to the
STIP + CRF (Banerjee and Nevatia, 2011). More-
over, on UCF Sports, we outperform Spatio Tempo-
ral Nor- malized Google-Like Distance Correlogram
2
The results presented in (Shi et al., 2015) are using FV.
However, since we directly compare with BoW, here we ap-
ply the same mid-level representation (BoW).
(ST-NGLDC) method (Zhang et al., 2012) by 2.93
p.p. using our CCW (Vectorized) representation. Fi-
nally, our three CCW evaluated representations pre-
sented a large accuracy gain when compared to Co-
occurrence Space (CS) method (Zhang et al., 2012).
The improvement achieved regarding the com-
pactness of CCW representation over BoW model
is very significant. We believe the reason for such
improvement lies on the information extracted from
co-occurrence related to global structures in vari-
ous local region-based features, moreover a pair (co-
occurrence) of codewords have more “vocabulary”
than a single histogram bin of codewords. In this
way, the CCW representation can encode the infor-
mation in more details than the BoW model which is
a histogram based features that use single codewords
discarding important information concerning spatial
relations among the features.
5 CONCLUSIONS
We have proposed a novel spatiotemporal feature
representation called Co-occurrence of Codewords
(CCW). The method is based on the extraction of
Haralick features from the co-occurrence matrices de-
rived from neighboring cuboids (features) obtained
from a pre-computed codebook.
We have demonstrated that CCW representation
is able to recognize actions accurately on three well-
known datasets. The employment of the CCW out-
performs the results achieved by several widely em-
ployed spatiotemporal features available in the liter-
ature encoded by a Bag-of-Words (BoW) model and
Statistical Measures from Co-occurrence of Codewords for Action Recognition
307

achieves comparable results with OFCM feature de-
scriptor + BoW showing a more compact representa-
tion. In addition, CCW presented better recognition
accuracy when compared to methods of the literature
that also employed co-occurrence to encode informa-
tion on action recognition tasks
Possible directions for future works include to
evaluate other features with CCW representation.
Moreover, we would like to evaluate CCW in other
video-related tasks. It is important to emphasize that,
since the CCWis a spatiotemporal feature representa-
tion, it can be also applied to other computer vision
applications involving video description.
ACKNOWLEDGMENTS
The authors would like to thank the Brazilian National
Research Council – CNPq (Grants #311053/2016-
5 and #449638/2014-6), the Minas Gerais Research
Foundation – FAPEMIG (Grants APQ-00567-14 and
PPM-00540-17) and the Coordination for the Im-
provement of Higher Education Personnel – CAPES
(DeepEyes Project).
REFERENCES
Banerjee, P. and Nevatia, R. (2011). Learning neighborhood
cooccurrence statistics of sparse features for human
activity recognition. In AVSS.
Caetano, C., dos Santos, J. A., and Schwartz, W. R. (2016).
Optical flow co-occurrence matrices: A novel spa-
tiotemporal feature descriptor. In ICPR.
Dalal, N. and Triggs, B. (2005). Histograms of oriented
gradients for human detection. In CVPR.
Dalal, N., Triggs, B., and Schmid, C. (2006). Human de-
tection using oriented histograms of flow and appear-
ance. In ECCV.
Danafar, S. and Gheissari, N. (2007). Action recognition for
surveillance applications using optic flow and svm. In
ACCV.
Haralick, R. M., Shanmugam, K. S., and Dinstein, I.
(1973). Textural features for image classification.
IEEE Transactions on Systems, Man, and Cybernet-
ics.
Howard, A. G., Zhu, M., Chen, B., Kalenichenko, D.,
Wang, W., Weyand, T., Andreetto, M., and Adam,
H. (2017). Mobilenets: Efficient convolutional neu-
ral networks for mobile vision applications. CoRR.
Keval, H. (2006). Cctv control room collaboration and com-
munication: Does it work? In Human Centred Tech-
nology Workshop.
Kl
¨
aser, A., Marszałek, M., and Schmid, C. (2008). A spatio-
temporal descriptor based on 3d-gradients. In BMVC.
Krig, S. (2014). Interest point detector and feature descrip-
tor survey. In Computer Vision Metrics. Apress.
Kuehne, H., Jhuang, H., Garrote, E., Poggio, T., and Serre,
T. (2011). Hmdb: A large video database for human
motion recognition. In ICCV.
Laptev, I. (2005). On space-time interest points. IJCV.
Laptev, I., Marszalek, M., Schmid, C., and Rozenfeld,
B. (2008). Learning realistic human actions from
movies. In CVPR.
Liu, D., Hua, G., Viola, P., and Chen, T. (2008). Integrated
feature selection and higher-order spatial feature ex-
traction for object categorization. In CVPR.
Liu, H., Liu, M., and Sun, Q. (2014). Learning direc-
tional co-occurrence for human action classification.
In ICASSP.
Nosaka, R., Ohkawa, Y., and Fukui, K. (2012). Feature ex-
traction based on co-occurrence of adjacent local bi-
nary patterns. In PSIVT.
Poppe, R. (2010). A survey on vision-based human action
recognition. Image Vision Comput.
Reddy, V., Sanderson, C., and Lovell, B. (2011). Improved
anomaly detection in crowded scenes via cell-based
analysis of foreground speed, size and texture. In
CVPRW.
Rodriguez, M., Ahmed, J., and Shah, M. (2008). Action
mach a spatio-temporal maximum average correlation
height filter for action recognition. In CVPR.
Schuldt, C., Laptev, I., and Caputo, B. (2004). Recognizing
human actions: A local svm approach. In ICPR.
Shi, F., Laganiere, R., and Petriu, E. (2015). Gradient
boundary histograms for action recognition. In WACV.
Sivic, J. and Zisserman, A. (2003). Video Google: A text
retrieval approach to object matching in videos. In
ICCV.
Sun, Q. and Liu, H. (2013). Learning spatio-temporal co-
occurrence correlograms for efficient human action
classification. In ICIP.
Wang, H., Klaser, A., Schmid, C., and Liu, C.-L. (2011).
Action recognition by dense trajectories. In CVPR.
Wang, H., Ullah, M. M., Klaser, A., Laptev, I., and Schmid,
C. (2009). Evaluation of local spatio-temporal fea-
tures for action recognition. In BMVC.
Wiliem, A., Madasu, V., Boles, W., and Yarlagadda, P.
(2012). A suspicious behaviour detection using a
context space model for smart surveillance systems.
CVIU.
Xiang, T. and Gong, S. (2008). Video behavior profiling for
anomaly detection. TPAMI.
Yang, Y. and Newsam, S. (2011). Spatial pyramid co-
occurrence for image classification. In ICCV.
Zalevsky, Z., Rivlin, E., and Rudzsky, M. (2005). Motion
characterization from co-occurrence vector descriptor.
PRL.
Zhang, L., Zhen, X., and Shao, L. (2012). High order co-
occurrence of visualwords for action recognition. In
ICIP.
Zhang, Z., Chen, Y., and Saligrama, V. (2014). A
novel visual word co-occurrence model for person re-
identification. In ECCVW.
Zhang, Z. and Saligrama, V. (2017). Prism: Person reiden-
tification via structured matching. TCSVT.
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
308
