
Automatic Object Segmentation on RGB-D Data using Surface
Normals and Region Similarity
Hamdi Yalin Yalic and Ahmet Burak Can
Computer Engineering Department, Hacettepe University, Ankara, Turkey
Keywords: Object Segmentation, RGB-D Data, Region Growing, Surface Normals.
Abstract: In this study, a method for automatic object segmentation on RGB-D data is proposed. Surface normals
extracted from depth data are used to determine segment candidates first. Filtering steps are applied to depth
map to get a better representation of the data. After filtering, an adapted version of region growing
segmentation is performed using surface normal comparisons on depth data. Extracted surface segments are
then compared with their spatial color similarity and depth proximity, and finally region merging is applied
to obtain object segments. The method is tested on a well-known dataset, which has some complex table-top
scenes containing multiple objects. The method produces comparable segmentation results according to
related works.
1 INTRODUCTION
With the easy accessibility of powerful depth
sensors, depth maps have become available as well
as RGB images for any indoor scene. Along with
these developments, scientific studies on 3D object
recognition, segmentation, and tracking using RGB-
D data have become popular in the recent years. In
the field of robotic vision, depth sensors are used
due to their low costs and mobility features.
Object detection and segmentation are very
useful tasks for robotic grasping, as well as for the
recognition and classification of the objects.
Therefore, segmentation is an important step for
robotic vision applications and used as an input for
the next steps. In situations where segmentation is
difficult with RGB information, more successful
results can be achieved with RGB and depth
information used together. Depth information
enables to develop image processing approaches
without being affected by color, texture and lighting
features of the objects. Furthermore, depth
information gives more cues about shape structures
and contributes to a better understanding of the
scene.
This paper introduces an automatic object
segmentation method for tabletop scenes, which may
contain mixed and complex sets with multiple
objects in it. In this method, the segmentation
process is performed in two main steps. Firstly,
image segmentation is performed on depth data
using an adapted version of region growing
algorithm, based on surface normal similarity and
smoothness. Then segmented regions are grouped
using depth proximity and their RGB features based
on color correlogram (Huang et al., 1997) and
histogram similarity to obtain objects. In order to
obtain better and accurate results, point cloud
filtering steps are applied and smoothed depth data
are obtained. The proposed method works unsuper-
vised and automatically segments different objects
in the scene. It produces meaningful segmentation
results comparable with previous studies.
The outline of the paper is as follows: Section 2
gives the related works in the literature about object
segmentation on RGB-D data. Section 3 introduces
the proposed method. Section 4 gives the
experimental results. Finally, Section 5 concludes
with the given results.
2 RELATED WORK
Studies on image and object segmentation using
RGB-D data has begun in the last seven years. Liu
(Liu et al., 2013) studied automatic object segmenta-
tion using RGB-D cameras. In their camera with
depth sensor (like Microsoft Kinect), there were
Yalic, H. and Can, A.
Automatic Object Segmentation on RGB-D Data using Surface Normals and Region Similarity.
DOI: 10.5220/0006617303790386
In Proceedings of the 13th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2018) - Volume 4: VISAPP, pages
379-386
ISBN: 978-989-758-290-5
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
379

some gaps and absences in the depth map. This
situation resulted in object boundaries not being
properly determined. To solve this problem, they
developed a three-way (trilateral) filter that includes
distance, RGB values, and boundary information.
They apply warping, error cleaning, and affine
mapping to eliminate holes caused by depth sensor
data acquisition. After this step, they used the
probabilistic boundary detector (Pbd) component. Pb
(probability of boundary) is a method that uses only
color information and extracts the boundary-priority
map of the object according to color differences. By
adding depth attribute as a parameter, it calculates
the probability that a pixel is at the boundary and its
orientation. In the last step, they segmented the
object using graph-cut and separated it from the
scene. During the evaluation of their work, they
measured the contribution of the depth information
that they added to the basic methods. They have
increased the performance of the segmentation.
Mishra (Mishra and Aloimonos, 2012, Mishra et
al., 2012) developed a segmentation strategy that
separates simple objects from the scene by using
color, texture and depth knowledge. They defined
the simple object as a compact zone surrounded by
depth and contact boundary. They improved on the
fixation-based segmentation method (Mishra et al.,
2009), which they found the most suitable closed
contour around the given point in the scene. In their
recent work, they have proposed a fixing strategy
that selects points from within an object, as well as a
method that allows the selection of closed curves
only for objects. The visual cues (color, depth)
around each edge pixel indicate whether that pixel is
at the object boundary. This information is kept in
the probabilistic boundary edge map. An edge finder
(Martin et al., 2004) with local brightness, texture
and color cues, was used when calculating this map.
If the segmentation process is examined
sequentially, it is seen that first a probabilistic
boundary edge map is obtained. By selecting the
most probable edge pixels in this map, the object
side is determined. By considering the object sides
of the boundaries in this map, fixation points are
selected on that side. Closed curves are obtained
from the determined points by the fixed-based
segmentation method and the resultant object
segments are obtained. They have studied the
experimental results in a comprehensive dataset (Lai
et al., 2011), quantitatively and qualitatively. During
quantitative analysis, they measured the
segmentation accuracy of segmented objects as a
single closed region and achieved a success rate of
over 90%.
Richtsfeld and colleagues have performed
numerous studies (Richtsfeld et al., 2012a),
(Richtsfeld et al., 2014) for object segmentation on
RGB-D data. In their study on the implementation of
Gestalt principles for object segmentation
(Richtsfeld et al., 2012b), they have defined the
relationships between surface patches on a 3D image
based on Gestalt principles in order to build a
learning-based structure. The scene structure is
rapidly abstracted by plane fitting on a 3D point
cloud. The fast and commonly used RANSAC
method is used for this purpose. But for curved
objects, it is necessary to soften and bend the
surfaces. At this point, they used the mathematical
construct called NURBS (non-uniform rational B-
splines), which is widely used in the field of
graphics. This structure enables to display all kinds
of conic sections (spherical, cylindrical, ellipsoid,
etc.). The plane placed on the point cloud is matched
to the cloud by minimizing the length of the nearest
point. On the geometric structure, a final model
selection is applied to determine the surface patches
to be used in object segmentation.
In their article describing perceptual grouping for
object segmentation on RGBD data (Richtsfeld et
al., 2014), they presented a comprehensive study
combining previous works. Once the surfaces have
been determined, the relationships between adjacent
surfaces, which are based on the Gestalt principles
mentioned above, are calculated to group them.
These features are surface color, the similarity of
relative size and texture amount, color similarity at
3D surface boundaries, average curvature and
curvature variance at 3D surface boundaries, average
depth and variance at 2D surface boundaries. Two
attribute vectors have been defined from the
previous relations: neighbouring and non-
neighbouring. These two vectors were used for
training SVM on hand-labeled RGB-D image sets.
The surface pairs of the same object are selected as
positive samples, while the surface samples of two
different objects or the object-background pairs are
negative samples. In the decision making, SVM
gives the probability value of each vector, as well as
producing binary results. They defined a graph
where surface patches represent the nodes and
probability values obtained from SVM represents
the edges. Finally using the graph-cut, object
segmentation was performed. As a result of the
detailed analysis of the segmented objects in
different complex scenes separated by different
categories, they achieved a success rate of over 90%.
They stated that on the same data sets, Mishra et al.
remained around 65%.
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
380

3 AUTOMATIC OBJECT
SEGMENTATION
In this paper, an automatic method for segmenting
objects in complex scenes on RGB-D data is
proposed. To accomplish this, an image
segmentation process is performed on the geometric
structure of the objects using the depth information.
Subsequently, object segmentation was performed
using neighbourhood information based on the depth
cue and color properties of the obtained regions.
The overall design of the system is illustrated in
the Figure-1. Details of all steps will be given in the
next sections of this paper.
3.1 Filtering
Depth data have some different features that are not
present in its RGB image, depending on the depth
acquisition device. Irregular density (describes
number of points in a given area), noise, and outliers
are some of the important ones. Previous studies
(Liu et al., 2013) show that point cloud data needs to
be filtered for better segmentation.
In our study, down-sampling like voxelgrid or
morphological operations are not preferred because
they modify the important properties of the point
cloud set. We used filters to eliminate noises and
remove outliers. The pass-through filter in Equation
(1) used for eliminating the areas where the depth
information is missing or larger than a pre-defined
threshold. P denotes the point cloud set for x,y,z
coordinates.
(1)
After that, radius outlier removal is used to erase
outlier points. Let be the number of
neighbours for
in a radius of r. We
remove the points from the cloud with less than a
given number of neighbours
within a radius r.
In Equation (2), denotes the outlier points set and
denotes the filtered points.
(2)
Pre-processing step is completed with filtering
and suitable data is obtained for the segmentation
step.
Point Cloud Filtering
RGB Depth
Image Segmentation by
Region Growing using
Surface Normals
Color Similarity and Depth
Proximity Features
Segmented Regions
Segmented Objects
Object Segmentation by
Region Merging
Figure 1: Overall system diagram for automatic object
segmentation.
Automatic Object Segmentation on RGB-D Data using Surface Normals and Region Similarity
381

3.2 Region-growing based
Segmentation using Normals
In our study, we used region-growing based
segmentation to cluster depth data. Since we only
deal with the depth data at this stage, we consider
the angle difference between the surface normals of
the points when growing the regions. Thus, while
smooth surfaces are treated as a single region,
regions with dramatically changing normals are
separated into different segments.
3.2.1 Surface Normal Estimation
Figure 2: (a) Sample RGB image from the dataset
(Richtsfeld et al., 2012a), (b) rotated depth image with
surface mapping, (c) computed surface normals using
depth map.
Surface normals are one of the important attributes
of a geometric surface and widely used in computer
graphics and vision applications. When a geometric
surface is considered, it is usually insignificant to
find a normal direction at a certain point on the
surface, as a perpendicular vector to the surface at
that point. However, since our acquired point cloud
data form a set of point samples on the real surface,
there are two common approaches for calculating the
surface normal. The underlying surface can be
obtained from the point cloud using surface mapping
techniques and compute normals from the mesh.
Another one is using approximations to derive the
surface normal from the point cloud directly. We
used the second approach since it gives sufficient
surface normal vector of the points about belonging
to the same surface.
We used widely known method (Hoppe et al.,
1992) for surface normal estimation. Briefly, it
selects a subset of points Φ inside point cloud P
from the neighbourhood of p. Then it fits local plane
through Φ and finally computes the normal vector N
of the plane. Our method computes the normal
vectors locally using six neighbouring points. The
number of neighbouring points is optimal for our
problem, and incrementing neighbour amount does
not have any positive affect on segmentation
according to our experiments. Figure-2 shows the
illustrations of computed surface normals from the
depth data of adjacent objects in the dataset.
3.2.2 Region-growing Segmentation
The aim of the algorithm is to merge similar points
that are similar enough in terms of smoothness.
Inputs of the algorithm are point cloud data after
filtering, computed surface normal and their
curvature value for each point in the cloud, normal
angle threshold and curvature threshold. Outputs are
the set of regions where each region is a set of points
that are marked as a part of the same surface.
The algorithm is based on region-growing
segmentation that is widely known image
segmentation method. But the main difference is that
it uses angle comparison between the point normals
instead of intensity. A seed point is randomly
selected and added to the set of seeds. The algorithm
finds neighbouring points for every seed point.
Every neighbour point is compared to the angle
between its normal and current seeds normal. If it is
less than the threshold (10/180* in radians, equals
to 10 degrees), then the current point is added to the
current segmented region. After that, every
neighbour is compared for the curvature. If
curvature value is less than the determined threshold
(1.0), then this point is added to the set of seeds.
Current seed is removed from the set. If the set of
seeds becomes empty, that means the algorithm has
grown the region and it is repeated from the
beginning. As a result, we obtain object surfaces in
the depth data that can be an important input for
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
382

object segmentation. Thresholds are determined
according to data set calculations and tuned for
optimal values. Pseudocode of the algorithm for
region growing segmentation based on surface
normal is shown below:
Inputs:
P // Points in the point cloud
N // Surface normal calculated from each point
C // Curvature value of the points
// Normal angle threshold
// Curvature threshold
Set SgtRgn = { } // Segmented region list
Set PointsToGrow = P // Points available for growing
Algorithm:
While PointsToGrow != null do
| SgtRgn
current
= { } // Region segment
| Seed
current
={ } // Set of current seeds
| NextPoint = rand (PointsToGrow)
| Seed
current
= Seed
current
NextPoint
| SgtRgn
current
= SgtRgn
current
NextPoint
| PointsToGrow = PointsToGrow NextPoint
| For i = 0 to size(Seed
current
) do
| | SeedCurrNeig = FindNearNeigbours (Seed
current
[i])
| | For j = 0 to size(SeedCurrNeig) do
| | | P
j
= SeedCurrNeig[j]
| | | If PointsToGrow.contains ( P
j
) AND
| | | cos-1( N[Seed
current
[i]] , N[Seed
current
[j]] ) <
then
| | | | | SgtRgn
current
= SgtRgn
current
P
j
| | | | | PointsToGrow = PointsToGrow P
j
| | | | | If C[P
j
] <
then
| | | | | | Seed
current
= Seed
current
P
j
| | | | | end if
| | | end if
| | end for
| end for
| SgtRgn = SgtRgn SgtRgn
current
end while
Return SgtRgn
As a result of the algorithm, all the regions are
obtained from the point cloud which are on the same
object surface. Figure-3 shows the segmentation
results after region growing which is mapped and
compared with its original RGB image. As seen
from the output, each surface of the 3D objects
segmented as different regions. So, this yields to an
over-segmentation problem that is one object is
represented with multiple region segments. These
regions need to be merged to obtain single object
instances. There are also small regions segmented
mostly in object boundaries because of surface
normal values. These regions are also handled in the
next region-merging section.
Figure 3: Region growing segmentation result.
3.3 Object Segmentation based on
Spatial Color Similarity of the
Regions
In order to achieve better segmentation performance,
regions have to be merged appropriately for
extracting objects from the scene. Only depth cue
cannot be sufficient at this point. Because, as it can
be seen in Figure 3, it is difficult to decide whether
the boundary points belong to the same object or
different object in complex scenes where there are
multiple adjacent objects. Segmenting an object that
is partially occluded by another object is relatively
easy if there is a distance between them. For these
reasons, in addition to depth information, we have
proposed an approach that adds color information of
regions to the process. Since the surfaces of the
objects in the datasets have complex texture and
color properties, using histograms did not yield
successful results in our experiments.
To extract global color information of segments,
we used Huang's approach (Huang et al., 1997),
which is mostly known for image indexing or
retrieval. It is a widely used image feature called
color correlogram. It parses the spatial correlation of
colors and tolerates large changes in appearance and
shape caused by viewing directions. This property
makes this feature convenient for our work because
different surfaces of the same object have similar
color characteristics.
In our method, the color image obtained from the
region is firstly quantized as 64 colors (4x4x4) in
RGB space. Then, using the 4 pre-defined distance
values as in Huang's work, the neighborhoods at
these distances are determined for each pixel. By
taking the color values at these points, the
correlogram is calculated and transformed into the
1x64 feature vector, resulting in a histogram-like
color Auto-correlogram.
The color correlogram is calculated (denoted by
) and sorted for all segmented regions. At the
final stage, the color correlograms extracted from
the regions and the contact boundaries of these
regions have been taken into consideration in order
to merge the regions. Starting from the first region,
the correlogram vectors are compared ( is the
histogram comparison function, squared Euclidean
distance is used). And it is also checked whether
these regions have contact boundaries. In doing so,
all boundary points (denoted by function) of
the region are compared to all boundary points of the
other regions, and these two regions are merged if
they share common boundary. operator specifies
that two regions have mutual boundaries i.e.
Automatic Object Segmentation on RGB-D Data using Surface Normals and Region Similarity
383
boundary points are closer in means of depth
distance. Below algorithm explains region merging
process. These steps are performed iteratively until
all regions are checked.
Algorithm:
Object
0
= Segment
0
For i = 0 to size(Region_segments) do
| For j = i + 1 to size(Region_segments) do
| | If ( Bound (Segment
i
) Bound (Segment
j
) )
AND
| | dist (corr (Segment
i
), corr (Segment
j
)) < thresh then
| | | Object
x
= Object of Segment
i
| | | Object
x
Segment
i
Segment
j
| | end if
| end for
end for
After the object segmentation process is
completed, there are still some areas which have few
points, especially in the object boundaries. The
correlogram extracted from these regions does not
give meaningful results. Therefore, these regions are
merged with another surface/region adjacent to
them. This process, which has no effect on the
segmentation quantitative results, has the effect on
quality of the results and it provides a better
representation of the segmented object. The region
with the maximum number of points is not treated as
an object because it represents the plane on which
the objects are standing (mostly surface of the table).
4 EXPERIMENTAL RESULTS
In this section, experimental results of the proposed
method are discussed. Experiments are performed on
four datasets. First one is (Lai et al., 2011) RGB-D
Objects Dataset. It consists of 300 objects in 51
categories. This set is widely used for object
recognition, but we used it only for evaluation of our
object segmentation method on single instance
objects, not for comparison. They also have another
dataset (Lai et al., 2012) called RGB-D Scenes
Dataset which consists of 14 scenes and many
objects with multiple views. The Object
Segmentation Dataset (Richtsfeld et al., 2012a)
contains 111 scenes which consist of boxes,
cylindrical objects, occluded and stack objects with
complex scenes. Willow garage dataset (Aldoma and
Richtsfeld, 2012) contains approximately 160
frames includes mixed objects. All datasets are
moderately realistic and contain table-top scenes
with objects stand on it.
Table 1: Object segmentation accuracy on different scene
categories compared with related works.
Segmentation accuracy %
Scene category
Ours
Richtsfel
d
Mishr
a
Various single
objects (dataset
Lai,2011)
92
NA
NA
Single boxes
95
99
71
Cylindrical objects
90
99
66
Stacked boxes
90
93
64
Occluded objects
91
99
76
Mixed objects
88
94
62
Complex scenes
82
89
55
During quantitative analysis, we considered the
number of objects segmented correctly from the total
number of objects. We used sub-categories such as
single object instances (contains various type of
objects like apple, ball, cap, banana etc.), and also
different categories described in (Richtsfeld et al.,
2014) like single boxes, cylindrical objects, stacked
boxes, occluded objects, mixed objects and complex
scenes. Table-1 shows the object segmentation
accuracy of our method on different scene categories
compared with related works. Scene category of the
various single objects are from dataset (Lai et al.,
2011) and other categories are from dataset
(Richtsfeld et al.). As expected, our method gives
the best results in itself at the scenes where there is
only one object. The segmentation of simple objects
like boxes is more successful than objects with
complex surfaces. Multiple stacked objects or
occlusions do not have a negative affect on our
segmentation performance. Also, the number of
objects in a scene, would not affect performance, but
accuracy is reduced in more complex scenes
(Figure-4). When we examine fault cases of our
method, we can see that different surfaces of the
object are grouped incorrectly in cases where they
contain different color information. Richtsfeld’s
method seems better than our method for many
scene categories in Table-1, because they used
learning techniques for relations between object
surfaces, and that leads to better segmentation
results in complex scenes.
One of the most important factors affecting the
segmentation performance is the image resolution.
Images in the dataset (depth and RGB) have a
maximum resolution of 640x480 pixels. Due to the
small size of the objects in the scene, the properties
of the surface of the objects (like color, surface
normals) cannot be extracted precisely. As a result,
incorrect segmentation occurs.
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
384

Stack of boxes
Various objects
Mixed & complex scene
RGB image
Depth data
Extracted
surfaces after
region growing
Segmented
Objects
Figure 4: Sample results from the datasets (First column and last column images (Richtsfeld et al., 2012a), middle image
(Aldoma and Richtsfeld)). Images in first two rows are from the datasets and last two rows are produced from our method.
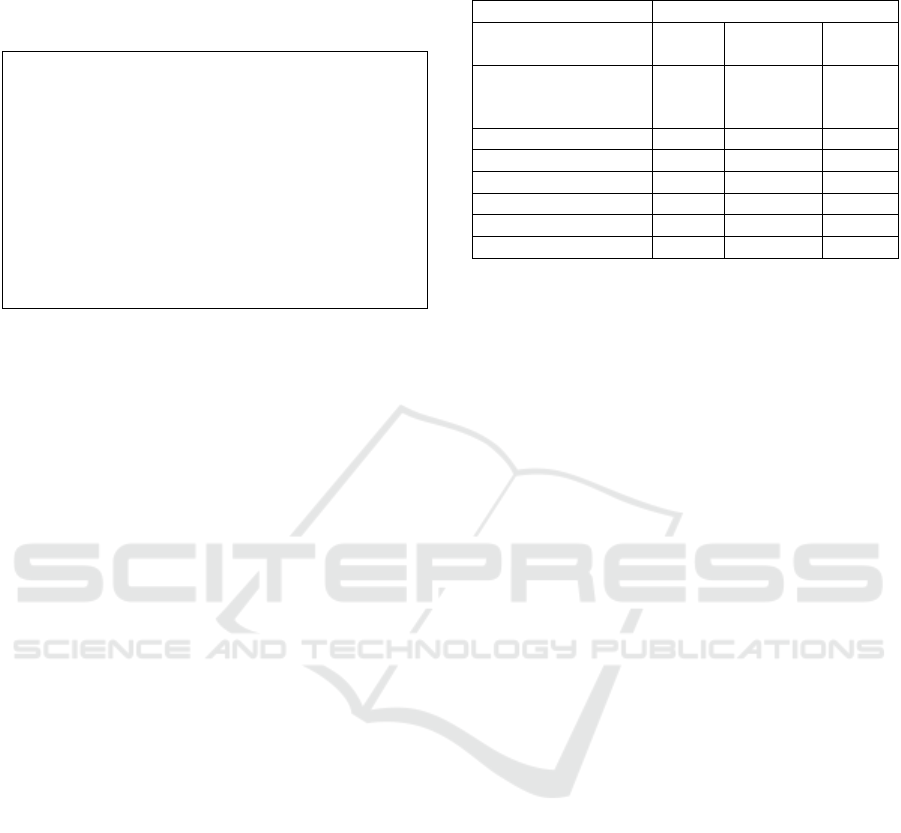
When comparing the performance of our method
with the related works, we considered those who
experimented on the same dataset with us. In doing
so, we have included the best segmentation accuracy
of those studies that they mentioned. As it can be
seen in Table 2, our method is competing with or
even exceeding the relevant works in the field of
RGB-D object segmentation. Our comparison also
includes the results obtained by using only depth
information, where the colors on the surfaces are not
taken into consideration. Although we can achieve a
certain performance using only depth information,
we get the best results with color + depth data.
We compared the number of points difference
between ground truth data and our segmented object
while performing qualitative analysis. The ratio of
the number of points in the object segment to the
difference gives the incorrectly segmented points.
The average value is 1.23% through all scenes in all
of the datasets, that means segmented objects have
98.77% correct points compared to ground truth.
Table 2: Comparison of our method with the related works
(overall percentage of objects segmented correctly).
Dataset
Methods
Richtsfeld
Mishra
Ours
only depth
Ours
depth+color
Richtsfeld – Object
Segmentation
Dataset
(Richtsfeld et al.,
2012a)
93
62
74
89
Willow garage
dataset
(Aldoma and
Richtsfeld, 2012)
92
87
82
90
Lai – RGBD Scenes
Dataset
(Lai et al., 2012)
NA
91
80
93
Automatic Object Segmentation on RGB-D Data using Surface Normals and Region Similarity
385

5 CONCLUSIONS
We proposed an automatic object segmentation
method using RGB-D data based on region growing
and region similarity. We apply point cloud filtering
for better abstraction of the depth data. After that
region growing segmentation is performed on point
cloud data based on surface normals. Since
segmentation with surface normal causes over-
segmentation, segmented surfaces of the objects
need to be grouped at the final step. Thus, we apply
a region merging method based on color
correlogram similarity and depth proximity
information of surface regions.
Experimental results show that our method has
comparable segmentation accuracy. The contribution
of our study is that primary features like surface
normals and color similarity of object surfaces can
be used for object segmentation using RGB-D data.
We explained a method that works unsupervised and
does not need to know how many objects exist in the
scene. Additionally, objects category is not an issue.
As a future work, machine learning methods can
be used to extract surface relations. Furthermore,
computation time is high and thus the proposed
method cannot be used in a real-time system for
now. If the algorithm is parallelized by taking
advantage of GPUs, the method can achieve real-
time video processing.
REFERENCES
Aldoma, A. & Richtsfeld, A. 2012. The willow garage
object recognition challenge [Online]. Available:
http://www.acin.tuwien.ac.at/forschung/v4r/software-
tools/object-instance-recognition-dataset/ [Accessed].
Hoppe, H., DeRose, T., Duchamp, T., McDonald, J. &
Stuetzle, W. 1992. Surface reconstruction from
unorganized points. SIGGRAPH Computer Graphics,
26, 71-78.
Huang, J., Kumar, S. R., Mitra, M., Zhu, W.-J. & Zabih,
R. 1997. Image indexing using color correlograms.
Computer Vision and Pattern Recognition, 1997.
Proceedings., 1997 IEEE Computer Society
Conference on, IEEE, 762-768.
Lai, K., Bo, L., Ren, X. & Fox, D. 2011. A large-scale
hierarchical multi-view rgb-d object dataset. Robotics
and Automation (ICRA), 2011 IEEE International
Conference on, IEEE, 1817-1824.
Lai, K., Bo, L., Ren, X. & Fox, D. 2012. Detection-based
object labeling in 3d scenes. Robotics and Automation
(ICRA), 2012 IEEE International Conference on,
IEEE, 1330-1337.
Liu, H., Philipose, M. & Sun, M.-T. 2013. Automatic
Objects Segmentation with RGB-D Cameras. Journal
of Visual Communication and Image Representation.
Martin, D. R., Fowlkes, C. C. & Malik, J. 2004. Learning
to detect natural image boundaries using local
brightness, color, and texture cues. Pattern Analysis
and Machine Intelligence, IEEE Transactions on, 26,
530-549.
Mishra, A., Aloimonos, Y. & Fah, C. L. 2009. Active
segmentation with fixation. Computer Vision, 2009
IEEE 12th International Conference on, IEEE, 468-
475.
Mishra, A. K. & Aloimonos, Y. 2012. Visual
segmentation of “Simple” objects for robots. Robotics:
Science and Systems VII, 217.
Mishra, A. K., Shrivastava, A. & Aloimonos, Y. 2012.
Segmenting “simple” objects using RGB-D. Robotics
and Automation (ICRA), 2012 IEEE International
Conference on, IEEE, 4406-4413.
Richtsfeld, A., Morwald, T., Prankl, J., Zillich, M. &
Vincze, M. 2012a. Segmentation of unknown objects
in indoor environments. Intelligent Robots and
Systems (IROS), 2012 IEEE/RSJ International
Conference on, IEEE, 4791-4796.
Richtsfeld, A., Mörwald, T., Prankl, J., Zillich, M. &
Vincze, M. 2014. Learning of perceptual grouping for
object segmentation on RGB-D data. Journal of visual
communication and image representation, 25, 64-73.
Richtsfeld, A., Zillich, M. & Vincze, M. 2012b.
Implementation of Gestalt principles for object
segmentation. Pattern Recognition (ICPR), 2012 21st
International Conference on, IEEE, 1330-1333.
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
386
