
Real-time Human Pose Estimation with Convolutional Neural Networks
Marko Linna
1
, Juho Kannala
2
and Esa Rahtu
3
1
University of Oulu, Finland
2
Aalto University, Finland
3
Tampere University of Technology, Finland
Keywords:
Human Pose Estimation, Person Detection, Convolutional Neural Networks.
Abstract:
In this paper, we present a method for real-time multi-person human pose estimation from video by utilizing
convolutional neural networks. Our method is aimed for use case specific applications, where good accuracy
is essential and variation of the background and poses is limited. This enables us to use a generic network
architecture, which is both accurate and fast. We divide the problem into two phases: (1) pre-training and
(2) finetuning. In pre-training, the network is learned with highly diverse input data from publicly available
datasets, while in finetuning we train with application specific data, which we record with Kinect. Our method
differs from most of the state-of-the-art methods in that we consider the whole system, including person
detector, pose estimator and an automatic way to record application specific training material for finetuning.
Our method is considerably faster than many of the state-of-the-art methods. Our method can be thought of as
a replacement for Kinect in restricted environments. It can be used for tasks, such as gesture control, games,
person tracking, action recognition and action tracking. We achieved accuracy of 96.8% (PCK@0.2) with
application specific data.
1 INTRODUCTION
Human pose estimation in unconstrained environment
is a problem where humans yet perform better than
computers. In recent years, the research has moved
from traditional methods (Felzenszwalb et al., 2008;
Andriluka et al., 2009; Yang and Ramanan, 2011;
Sapp and Taskar, 2013) towards convolutional neural
networks (ConvNets) (Jain et al., 2013; Toshev and
Szegedy, 2014; Pfister et al., 2014; Jain et al., 2014;
Carreira et al., 2015; Pishchulin et al., 2015; Pfister
et al., 2015; Tompson et al., 2015; Lifshitz et al.,
2016; Wei et al., 2016; Newell et al., 2016; Charles
et al., 2016). Due to this, significant improvements in
accuracy have been accomplished. ConvNets became
popular, when AlexNet (Krizhevsky et al., 2012) was
introduced. AlexNet could classify images on diffe-
rent categories. Since then, several more efficient net-
work architectures have been proposed, for both clas-
sification and human pose estimation.
Many state-of-the-art ConvNet human pose esti-
mation methods uses more complex network archi-
tectures and they perform considerably well in un-
constrained environments (Lifshitz et al., 2016), (Ne-
well et al., 2016), (Insafutdinov et al., 2016), where
large variations in pose, clothing, view angle and
background exists. While these methods have high
accuracy, they are usually slow considering real time
pose estimation. Recent research (Toshev and Sze-
gedy, 2014), (Pfister et al., 2014) shows that by using
a generic ConvNet architecture, a competitive accu-
racy can be achieved, while still maintaining a fast
forward pass time. This is the main motivation of our
research. With our method, we don’t aim for overall
human pose estimation in diverse input data, but rat-
her target to specific use cases where high accuracy
and speed are required. In such cases, the problem
is different, because the environment is usually con-
strained, persons are in close proximity of the camera
and poses are restricted. Possible application for our
method are, for instance, gesture control systems and
games.
Our method is a multi-person human pose estima-
tion system, targeted for use case specific applicati-
ons. In order to support multiple people, we use a
person detector, which gives locations and scales of
the persons in the target image. This brings our met-
hod towards the practice, since person location and
scale are not expected to be known, which is the case
with many state-of-the-art methods (Lifshitz et al.,
2016), (Wei et al., 2016), (Newell et al., 2016). We
use a generic ConvNet architecture, with eight layers.
The key idea of our method is to pre-train the net-
work with highly diverse input data and then finetune
Linna, M., Kannala, J. and Rahtu, E.
Real-time Human Pose Estimation with Convolutional Neural Networks.
DOI: 10.5220/0006624403350342
In Proceedings of the 13th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2018) - Volume 5: VISAPP, pages
335-342
ISBN: 978-989-758-290-5
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
335

it with use case specific data. We show that compe-
titive accuracy can be achieved in application speci-
fic pose estimation, while operating in real-time. Our
method can be used for higher level tasks, for exam-
ple, gesture control, gaming, action recognition and
action tracking.
The main contributions of our method are: (1)
utilization of person detector to crop person cente-
red images in both training and testing, thus enabling
multi-person pose estimation in real world images,
(2) ability to learn from heterogeneous training data,
where the set of joints is not the same in all the trai-
ning samples, thus enabling to use more varied data-
sets in training, (3) utilization of Kinect for automatic
training data generation, thus making it easy to gene-
rate large amount of annotated training data, (4) so-
mewhat slower and less accurate depth sensor free al-
ternative for Kinect (Shotton et al., 2013) in restricted
environments. The frame rate of our method is about
13 Hz, when with Kinect it is 15 or 30 Hz, depending
on the lighting conditions. Our method works with
RGB cameras while Kinect needs also a depth sensor.
2 RELATED WORK
Jain et al. (Jain et al., 2013) demonstrated that Con-
vNet based human pose estimation can meet the per-
formance, and in many cases outperform, traditional
methods, particularly deformable part models (Fel-
zenszwalb et al., 2008) and multimodal decomposa-
ble models (Sapp and Taskar, 2013). Their network
architecture consisted of three convolutional layers,
followed by three fully connected layers. They trai-
ned the network for each body part (e.g. wrist, shoul-
der, head) separately. Each network was applied as
sliding windows to overlapping regions of the input
image. A window of pixels was mapped to a single
binary output: the presence or absence of that body
part. This made possible to use much smaller net-
work, at the expense of having to maintain a separate
set of parameters for each body part.
Another application to human pose estimation was
presented by Toshev and Szegedy (Toshev and Sze-
gedy, 2014). Their network architecture was simi-
lar to AlexNet (Krizhevsky et al., 2012), but the last
layer was replaced by a regression layer, which out-
put joint coordinates. In addition to this, they trai-
ned a cascade of pose regression networks. The cas-
cade started off by estimating an initial pose. Then
at subsequent stages, additional regression networks
were trained to predict a transition of the joint loca-
tions from previous stage to the true location. Thus,
each subsequent stage refined the currently predicted
pose. Similar idea is applied in more recent work by
Carreira et al. (Carreira et al., 2015).
A video based human pose estimation method was
introduced by Pfister et al. (Pfister et al., 2014). Their
method utilized the temporal information available in
constrained gesture videos. This was achieved by trai-
ning the network with multiple frames so that the fra-
mes were inserted into the separate color channels
of the input. The network architecture was similar
to AlexNet, having five convolutional layers, follo-
wed by three fully connected layers, from which the
last one was a regression layer. However, there were
some differences compared to the previous architectu-
res. Some of the convolutional layers were much dee-
per and pooling was non-overlapping, when in most
of the previous architectures it was overlapping. The
network produced significantly better pose predicti-
ons on constrained gesture videos than the previous
work. For this reason, we base our method to this
network architecture.
3 METHOD
Our method is targeted for video inputs. The rough
steps for a single video frame in testing are: (1) detect
persons, (2) crop person centered images, (3) feedfor-
ward person images to the pose estimation network.
We use an object detector (Ren et al., 2015) to solve
person bounding boxes from the input frame. The
pose estimation is done for each person individually.
As a result of the pose estimation, our network out-
puts locations of body keypoints.
We pre-train our network by using data from mul-
tiple publicly available datasets, thus offering good
initialization values for finetuning. We evaluate pre-
training and finetuning separately. For the evaluation
of the finetuning, we use data recorded with Kinect.
As for ConvNet framework, we use Caffe (Jia et al.,
2014) with small modifications.
3.1 Person Detection
Our method utilize Faster R-CNN (F-RCNN) (Ren
et al., 2015) to detect persons from training and tes-
ting images. The forward pass time of the F-RCNN is
60ms or 200ms, depending on the used network. We
use the slower and more accurate model.
We noticed that sometimes F-RCNN gives false
positives. This is not a problem in training, since we
use both the ground truth and the F-RCNN together to
crop the training image. But in testing, the pose esti-
mation is also performed for false positives. However,
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
336

Table 1: Overview of used datasets in pre-training. Only the training set of the MPII Human Pose is used, because the
annotations are not available for the test set. In the BBC Pose, the training set is annotated semi-automatically (Buehler et al.,
2011), while the test set is manually annotated. We use only manually annotated data from the BBC pose. We use data
augmentation to expand the number of training images.
Person boxes we use
from the dataset
Person boxes we use for
pre-training and validation
Annotated
pointsDataset Train Test Total Train (aug.) Validation
MPII Human Pose (Andriluka et al., 2014) 1-16 28821 0 28821 71018 1160
Fashion Pose (Dantone et al., 2013) 13 6530 765 7295 14538 694
Leeds Sports Pose (Johnson and Everingham, 2010) 14 1000 1000 2000 5074 146
FLIC (Sapp and Taskar, 2013) 11 3987 1016 5003 14780 0
BBC Pose (Charles et al., 2013) 7 0 2000 2000 6764 0
40338 4781 45119 112174 2000
most likely these false positives could be filtered, es-
pecially with use case specific images, by adjusting
the parameters of the F-RCNN. In the evaluation, we
use also the ground truth to decide if the frame has a
person or not, so it is guaranteed that all the evalua-
tion frames contain a person. Apart from this, we ran
the F-RCNN for the original finetuning evaluation fra-
mes, where the ground truth was not yet used for the
frame selection. This resulted in false positive rate of
2.86% and false negative rate of 0.65%. In all of the
original evaluation frames, there is one fully visible
person making gestures in constrained environment.
Person detection was considered false if the resulted
bounding box did not contain a person, or if it had par-
tially visible person on the edges of the bounding box.
In other words, if the intersection-over-union (IoU)
ratio between the detection and the ground truth was
0.5 or less.
3.2 Data Augmentation
The F-RCNN person detector is applied for each
training image. For each detected person, the IoU
between the detected person bounding box and the
expanded ground truth bounding box is calculated.
The expanded ground truth person box is the tightest
bounding box, including all the joints, expanded by a
factor of 1.2. The person box having the biggest IoU
is selected as the best choice. Based on the best IoU,
Table 2: The relation between the person box overlapping
ratio and the data augmentation.
Person box type used in augmentation
Overlapping ratio F-RCNN Ground truth
IoU > 0.7 X
IoU < 0.5 X
0.5 ≥ IoU ≤ 0.7 X X
the training image is augmented by using either of the
person bounding boxes, or both (see Table 2).
In practice, this means that if the detected person
box is near to the ground truth expanded person box,
only the former is used to crop the person image. And
if the detected person box is far from the ground truth
expanded person box, only the latter is used to crop
the person. And in between of these, both person
boxes are used to crop the person, resulting in two
training images, where both have small differences in
translation and scale. The shortest side of a person
box is expanded to equal the longest side, resulting a
square crop area, defining the person image used in
training. Zero padding is added where needed. A sin-
gle cropped person image is rescaled to size 224×224
before feeding it to the network.
In addition to aforementioned, a training image is
augmented by doing a horizontal flip. All in all, a sin-
gle person image from a source dataset can result in
either two or four augmented person centered training
images.
3.3 Pre-training
We pre-train the model from scratch by using se-
veral publicly available datasets (see Table 1). The
number of annotated joints varies between the data-
sets. The MPII Human Pose (Andriluka et al., 2014),
Fashion Pose (Dantone et al., 2013) and Leeds Sports
Pose (Johnson and Everingham, 2010) have full body
annotations, while the FLIC (Sapp and Taskar, 2013)
and BBC Pose (Charles et al., 2013) have only upper
body annotated. Since we use a single point for the
head, and because the MPII Human Pose and Leeds
Sports Pose have annotations for the neck and head
top, we take the center point of these and use it as a
head point.
As we aim to study that whether additional parti-
ally annotated training data brings improvement over
Real-time Human Pose Estimation with Convolutional Neural Networks
337

Figure 1: Example pose estimations with the pre-trained
network. Samples are taken randomly from the testing set of
the MPII Human Pose dataset. The green bounding boxes
are the results of person detection and the number on the
top-left corner is the probability of a box containing a per-
son.
using only fully annotated samples, our validation
samples should be fully annotated. Thus, we put all
the fully annotated (13 joints) person images to a sin-
gle pool and sample 2000 images randomly for vali-
dation. The validation images are then removed from
the pool. Next, we put all the partially annotated ima-
ges to the same pool so that it eventually contains
person images with heterogeneous set of annotated
joints. Then we use the pool in training. The purpose
of the pre-trained model is to offer a good weight ini-
tialization values for finetuning. Pre-training takes 23
hours on three NVIDIA Tesla K80 GPUs. Fig. 1 con-
tains example pose estimations with the pre-trained
network.
3.4 Finetuning
The purpose of the finetuning is to adapt the pre-
trained model for the particular use case. For instance
a gesture control system or a game. The pre-trained
model alone is not a good enough pose estimator for
our use cases, because the shallow network we use
lacks the capacity to perform well with highly diverse
training data. More complicated network architectu-
res, such as (Newell et al., 2016), (Lifshitz et al.,
2016) would certainly give better results, but then the
speed gain achieved with shallow network architec-
ture would most likely be lost.
In finetuning, the pre-trained model is used for
weight initialization. When the network is finetuned
Figure 2: Example pose estimations with the finetuned
network. Predictions are in red and Kinect ground truth
in green. On the columns are five different frames from
the evaluation data. The first row shows results of the
full finetuning (experiment 3) and the second row shows
results of the phase 1 (experiment 1). Experiments are
explained later in Section 4. Full videos are available
at https://youtu.be/qjD9NBEHapY and https://youtu.be/e-
P5SYL-Aqw.
with use case specific data, for example to estimate
poses in gesture control system, the training data is
most likely consistent. This is a good thing when
thinking of accuracy. Even a shallow network can
produce very good estimations, if the training data is
limited to particular use case. Using more complica-
ted, and potentially slower, network architectures in
these situations is therefore not necessary. We use Ki-
nect in our experiments to produce annotations for the
finetuning data, but alternative methods can be consi-
dered as well. Fig. 2 contains example pose estimati-
ons with the finetuning evaluation data.
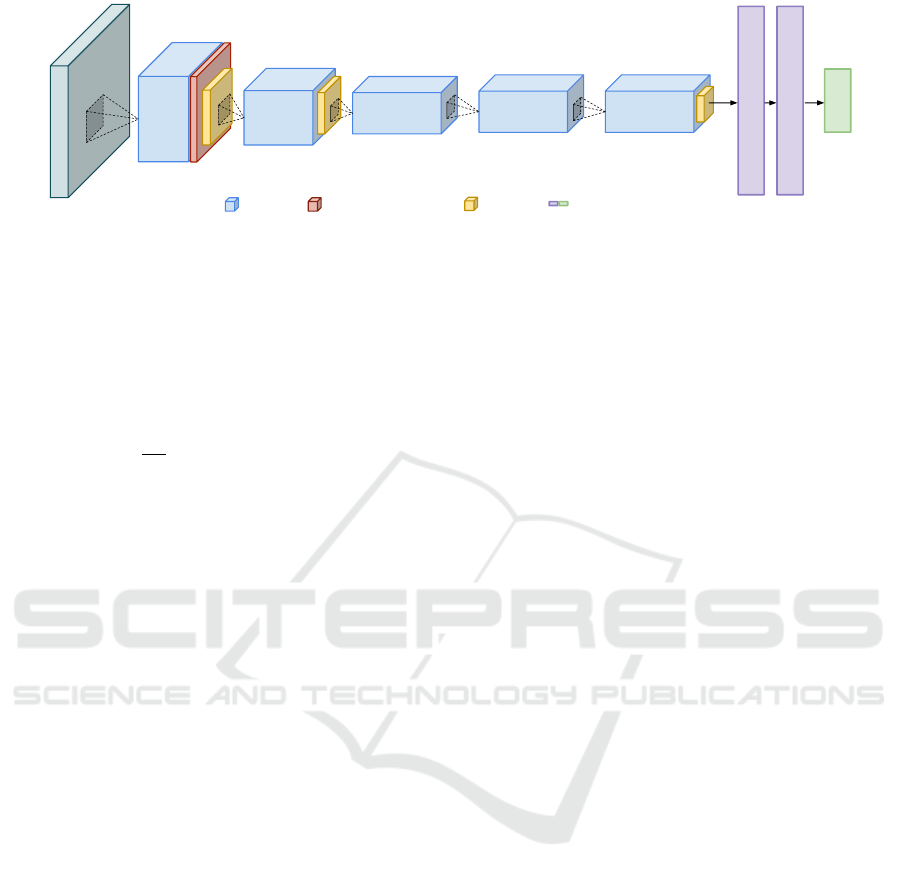
3.5 Network Architecture
Our method utilizes generic ConvNet architecture,
having five convolutional layers followed by three
fully connected layers, from which the last layer is re-
gression layer (see Fig. 3). The regression layer pro-
duces (x, y) position estimates for human body joints.
More closely, one estimation for head, six for arms
and six for legs, a total of 13 position estimations.
The network input size is 224 × 224 × 3. We use ge-
neric ConvNet architecture, because it has shown to
perform well in human pose regression tasks (Tos-
hev and Szegedy, 2014), (Pfister et al., 2014). The
forward pass time of the network is 16ms on Nvidia
GTX Titan GPU, which makes it highly capable for
real-time tasks.
3.6 Training Details
In model optimization, the network weights are upda-
ted using batched stochastic gradient descent (SGD)
with momentum set to 0.9. In pre-training, where the
network is trained from scratch, the learning rate is set
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
338
Conv 1
k=7, s=2
FC
6
Conv 2
k=5, s=1
Conv 3
k=3, s=1
109x109x96
33x33x256
17x17x512
Conv 4
k=3, s=1
17x17x512
Conv 5
k=3, s=1
17x17x512
FC
7
FC
8
4096
4096
26
224x224x3
6x6x512
33x33x96
17x17x256
Convolution
Max pooling Fully connected
Local Response Normalization
109x109x96
k=3, s=3
k=2, s=2 k=3, s=3
Figure 3: The architecture of the pose estimation network. Letters k and s denotes kernel size and stride.
to 10
−2
, weights are initialized randomly using Xa-
vier algorithm (Glorot and Bengio, 2010) and biases
are set to zero. In finetuning, the learning rate is set to
10
−3
. The loss function we use in optimization, pe-
nalizes the distance between predictions and ground
truth. We use weighted Euclidean (L2) loss
E =
1
2N
N
∑
i=1
w
i
x
gt
i
− x
pred
i
2
2
(1)
where vectors w, x
gt
and x
pred
holds joint coordi-
nates and weights in form of (x
1
, y
1
, x
2
, y
2
, ..., x
13
,
y
13
). Weight w
i
is set to zero if the ground truth of
the joint coordinate x
gt
i
is not available. Otherwise it
is set to one. This way only the annotated joints con-
tribute to the loss. This enables training the network
using datasets having only the upper body annotati-
ons, along with datasets having full body annotations.
Ability to utilize heterogeneous training data, where
the set of joints is not the same in all training sam-
ples, potentially leads to better performance as more
training data can be used.
As for comparison, we train the pre-trained mo-
del also without using the weighted Euclidean loss.
In this case, we use only images with fully annota-
ted joint positions (13 joints), so that the training data
is homogenous regarding to joint annotations. Doing
this reduces the size of the training data from 112174
to 66598 images. The average joint prediction error
with heterogeneous and homogenous data are 15.7
and 16.6 pixels on 224 × 224 images. With hetero-
geneous data, there is about 5% improvement on pre-
diction error.
In batched SGD, we use batch size of 256. Each
iteration selects images for the batch randomly from
the full training set. A training image contains
roughly centered person of which joints are annota-
ted. The training images are resized to 224 × 224 be-
fore feeding to the network. Mean pixel value of 127
is reduced from every pixel component and the pixel
components are normalized to range [-1, 1]. Joint an-
notations are normalized to range [0, 1], according to
the cropped person centered image.
3.7 Testing Details
The person detector is applied for an image from
which poses are to be estimated. Person images are
cropped based on detections as described earlier. In
addition, for each person image, a horizontally flip-
ped double is created. Both the original and the dou-
bled person images are fed to the network. The final
joint prediction vector is average of the estimations of
these two (the predictions of the doubled image are
flipped so that they correspond predictions of the ori-
ginal image). By doing this, a small gain in accuracy
is achieved.
4 EVALUATION
We evaluate pre-training and finetuning with the per-
centage of correct keypoints (PCK) metric (Sapp and
Taskar, 2013), where the joint location estimate is
considered correct, if its L2 distance to the ground
truth is at most 20% of the torso length. The torso
length is the L2 distance between the right shoulder
and the left hip.
We use 2000 randomly taken samples for the eva-
luation of the pre-training. For finetuning, we record
data with Kinect for Windows v2 (see Table 3). We
use the joint estimates produced by Kinect as a ground
truth. We made sure that the data was recorded in
a such way, that the error in the joint estimations is
minimal. Practically this means good lightning con-
ditions, no extremely rapid movements and no major
body part occlusions. The gestures performed in the
data tries to mimic different gesture control events,
where the hands are used for tasks like object se-
lection, moving, rotating and zooming, in addition to
hand drawing and wheel steering.
For the evaluation of the finetuning, we record
additional 4000 frames with identical clothing . We
do three finetuning experiments, using different set of
training frames in each case (See Table 4). The expe-
riments 1 and 2 together uses the same training frames
Real-time Human Pose Estimation with Convolutional Neural Networks
339

as the experiment 3. Basically, the experiment 3 is the
same as the experiments 1 and 2 performed consecu-
tively. The purpose of this divide is to see the effect
of using the same/different clothing between the trai-
ning and testing data. The experiment 1 express more
of the ability of generalization (for all people) while
the experiments 2 and 3 of specificity (for certain pe-
ople).
The results are displayed in Fig. 4 and Table 5. In
full finetuning (experiment 3), with the use case spe-
cific data, the accuracy of 96.8% is achieved. In fine-
tuning phase 1 (experiment 1), where no same clo-
thing occurs between the training and testing data,
the accuracy is 90.6%. However, if we look at the
accuracy of wrist (pre-train: 24.5%, phase 1: 67.4%,
full: 89.2%), which is the most challenging body joint
to estimate, but perhaps also the most important one
considering a gesture control system, we can see that
additional case specific training data can significantly
improve the accuracy and make the system usable in
practice. This originates partially from the finetu-
ning data, where the wrist location variation is big-
gest. We believe, that if more training data would be
used, and perhaps a better data augmentation, a bet-
ter wrist accuracy could be achieved with the current
network architecture. After all, the wrist accuracy is
still decent, making our method useful for many use
cases.
The results indicate that a trade-off between gene-
ralization and specificity exists between pre-training
and finetuning. This can be seen by comparing
accuracies between the pre-trained and finetuned net-
works, first with the pre-train validation samples and
then with the finetuning validation samples. The pre-
train validation samples express the case of generali-
zation as they contain a large variation of persons and
poses in unconstrained environment. On the contrary,
the finetuning validation samples reflects the case of
Table 3: Kinect recorded finetuning data for training. All
the frames have similar background, person and gestures,
but clothing differs. For the evaluation, we additionally re-
cord 4000 frames, which have identical clothing (clothing
number 1).
Clothing Frames
1 27222
2 18760
3 20244
4 20726
5 10560
6 11666
7 10136
119314
specificity as they have restricted poses in constrained
environment. After the full finetuning, the accuracy
on the pre-train validation set drops from 63.1% to
44.2% (light red and dark red curves in Fig. 4), while
in the same time, the use case specific accuracy incre-
ases from 69.6% to 96.8% (blue and magenta curves).
In certain cases, the loss in generalization is accepta-
ble, if at the same time, gain in specificity is achie-
ved. One example of a such case is a gesture control
system set up in a factory, where all the persons wear
identical clothing. Most importantly, while generic
person detection in highly varying poses and contexts
is an important and challenging problem, our results
show that in some use cases the state-of-the art for the
generic problem may produce inferior results compa-
red to a simpler approach which has been specifically
trained for the problem at hand.
5 CONCLUSION
We introduced a real-time ConvNet based system
for human pose estimation and achieved accuracy of
96.8% (PCK@0.2) by finetuning the network for spe-
cific use case. Our method can be thought of as a
replacement for Kinect in restricted environments. It
can be used in various tasks, like gesture control, ga-
ming, person tracking, action recognition and action
tracking. Our method supports heterogeneous trai-
ning data, where the set of joints is not the same in all
the training samples, thus enabling utilization of dif-
ferent datasets in training. The use of a separate per-
son detector brings our method towards the practice,
where the person locations in the input images are not
expected to be known. In addition, we demonstrated
an automatic and easy way to create large amounts
of annotated training data by using Kinect. The net-
work forward time of our method is 16ms, without the
person detector and with the person detector, either
60+16=76ms or 200+16=216ms.
Table 4: Finetuning experiments. The training data have
(1) different clothing from the testing data in every frame,
(2) the same clothing as the testing data in every frame, (3)
the same clothing as the testing data in some of the frames.
In phase 2, the finetuning is done over already finetuned
network of the phase 1. Otherwise it is done over the pre-
trained network.
# Name Initialization
network
Clothing in
training frames
1 phase 1 pre-train 2,3,4,5,6,7
2 phase 2 phase 1 1
3 full pre-train 1,2,3,4,5,6,7
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
340
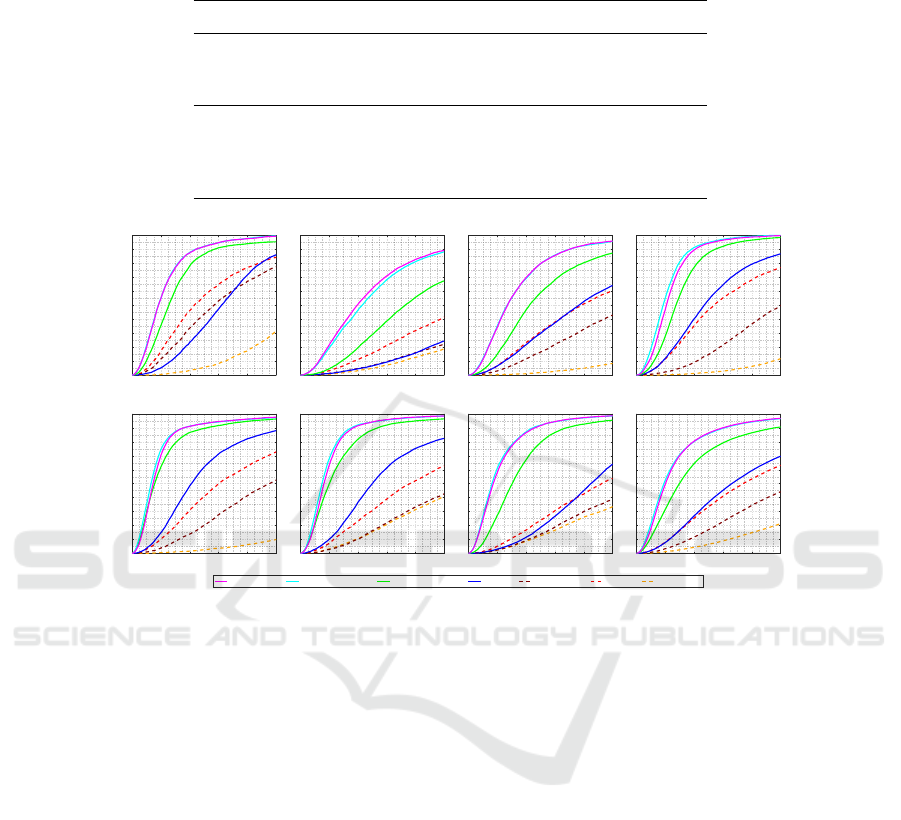
Table 5: The results of pose estimation (PCK@0.2). The first three cases uses pre-train validation samples (2000 images) in
testing, while other models use finetuning validation samples (4000 frames).
Network Head Wrist Elbow Shoulder Hip Knee Ankle All
Mean pose 31.1 18.9 8.5 11.8 10.0 40.8 33.5 21.4
Pre-train 84.2 41.6 60.5 76.9 72.8 62.6 53.7 63.1
Finetune (full) 77.5 22.2 42.9 49.8 52.5 42.6 38.6 44.2
Pre-train 86.1 24.5 64.1 86.8 88.0 82.5 64.0 69.6
Finetune (phase 1) 95.3 67.4 87.3 98.4 96.3 96.4 95.5 90.6
Finetune (phase 2) 99.6 88.1 95.6 99.9 97.3 98.5 98.5 96.6
Finetune (full) 99.3 89.2 95.9 99.7 97.6 98.5 98.6 96.8
0 0.04 0.08 0.12 0.16 0.2
Normalized distance
0
10
20
30
40
50
60
70
80
90
100
Detection rate (%)
Head
finetune (full) finetune (phase 2) finetune (phase 1) pre-train finetune (full) pre-train mean pose
0 0.04 0.08 0.12 0.16 0.2
Normalized distance
0
10
20
30
40
50
60
70
80
90
100
Detection rate (%)
Wrist
0 0.04 0.08 0.12 0.16 0.2
Normalized distance
0
10
20
30
40
50
60
70
80
90
100
Detection rate (%)
Elbow
0 0.04 0.08 0.12 0.16 0.2
Normalized distance
0
10
20
30
40
50
60
70
80
90
100
Detection rate (%)
Shoulder
0 0.04 0.08 0.12 0.16 0.2
Normalized distance
0
10
20
30
40
50
60
70
80
90
100
Detection rate (%)
Hip
0 0.04 0.08 0.12 0.16 0.2
Normalized distance
0
10
20
30
40
50
60
70
80
90
100
Detection rate (%)
Knee
0 0.04 0.08 0.12 0.16 0.2
Normalized distance
0
10
20
30
40
50
60
70
80
90
100
Detection rate (%)
Ankle
0 0.04 0.08 0.12 0.16 0.2
Normalized distance
0
10
20
30
40
50
60
70
80
90
100
Detection rate (%)
All
Figure 4: The results of pose estimation (PCK@0.2). The dashed lines uses pre-train validation samples (2000 images) in
testing, while the solid lines use finetuning validation samples (4000 frames). To put it other way, the dashed lines represent
the accuracy of generalization, while the solid lines represent the use case specific accuracy. The label indicates which network
is used in testing.
As for future work, there are several things that
could be considered in order to get better accuracy.
One option would be to use current network as a co-
arse estimator and use another network for refining
the pose estimation. In addition, as our method is tar-
geted for video inputs, the utilization of the spatiotem-
poral data would most likely give accuracy boost. The
network forward time of the person detector is relati-
vely slow compared to the pose estimation network
(16ms vs. 60ms/200ms). While the person detec-
tor works well with diverse input data, perhaps, with
most pose estimation use cases, that is not necessary.
By using more restricted and possibly faster person
detector, a good enough performance in more con-
strained environments could be most likely achieved.
Also, with ConvNets, generally, holds that if more
data used in training, the better performance gained.
Hence, the use of more advanced data augmentation
methods, such as (Pishchulin et al., 2012), especially
in the finetuning, would most probably lead to better
accuracy. Advanced data augmentation could, for ex-
ample, change colors of the clothes, adjust limb poses
and change backgrounds.
REFERENCES
Andriluka, M., Pishchulin, L., Gehler, P., and Schiele, B.
(2014). 2d human pose estimation: New benchmark
and state of the art analysis. In IEEE Conference on
Computer Vision and Pattern Recognition (CVPR).
Andriluka, M., Roth, S., and Schiele, B. (2009). Pictorial
structures revisited: People detection and articulated
pose estimation. In IEEE Conference on Computer
Vision and Pattern Recognition (CVPR), pages 1014–
1021.
Buehler, P., Everingham, M., Huttenlocher, D. P., and Zis-
serman, A. (2011). Upper body detection and tracking
in extended signing sequences. International Journal
of Computer Vision (IJCV), 95(2):180–197.
Carreira, J., Agrawal, P., Fragkiadaki, K., and Malik, J.
(2015). Human pose estimation with iterative error
feedback. arXiv preprint arXiv:1507.06550.
Real-time Human Pose Estimation with Convolutional Neural Networks
341

Charles, J., Pfister, T., Everingham, M., and Zisserman, A.
(2013). Automatic and efficient human pose estima-
tion for sign language videos. International Journal
of Computer Vision (IJCV).
Charles, J., Pfister, T., Magee, D., Hogg, D., and Zisser-
man, A. (2016). Personalizing video pose estimation.
In IEEE Conference on Computer Vision and Pattern
Recognition (CVPR).
Dantone, M., Gall, J., Leistner, C., and van Gool, L. (2013).
Human pose estimation using body parts dependent
joint regressors. In IEEE Conference on Computer
Vision and Pattern Recognition (CVPR), pages 3041–
3048, Portland, OR, USA.
Felzenszwalb, P., McAllester, D., and Ramanan, D. (2008).
A discriminatively trained, multiscale, deformable
part model. In IEEE Conference on Computer Vision
and Pattern Recognition (CVPR), pages 1–8.
Glorot, X. and Bengio, Y. (2010). Understanding the dif-
ficulty of training deep feedforward neural networks.
In International Conference on Artificial Intelligence
and Statistics (AISTATS’10).
Insafutdinov, E., Pishchulin, L., Andres, B., Andriluka, M.,
and Schiele, B. (2016). Deepercut: A deeper, stronger,
and faster multi-person pose estimation model. arXiv
preprint arXiv:1605.03170.
Jain, A., Tompson, J., Andriluka, M., Taylor, G. W., and
Bregler, C. (2013). Learning human pose estimation
features with convolutional networks. arXiv preprint
arXiv:1312.7302.
Jain, A., Tompson, J., LeCun, Y., and Bregler, C. (2014).
Modeep: A deep learning framework using motion
features for human pose estimation. In Asian Con-
ference on Computer Vision (ACCV), pages 302–315.
Jia, Y., Shelhamer, E., Donahue, J., Karayev, S., Long, J.,
Girshick, R., Guadarrama, S., and Darrell, T. (2014).
Caffe: Convolutional architecture for fast feature em-
bedding. arXiv preprint arXiv:1408.5093.
Johnson, S. and Everingham, M. (2010). Clustered pose and
nonlinear appearance models for human pose estima-
tion. In British Machine Vision Conference (BMVC).
doi:10.5244/C.24.12.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012).
Imagenet classification with deep convolutional neu-
ral networks. In Advances in Neural Information Pro-
cessing Systems (NIPS), pages 1097–1105.
Lifshitz, I., Fetaya, E., and Ullman, S. (2016). Human pose
estimation using deep consensus voting. arXiv pre-
print arXiv:1603.08212.
Newell, A., Yang, K., and Deng, J. (2016). Stacked hour-
glass networks for human pose estimation. arXiv pre-
print arXiv:1603.06937.
Pfister, T., Charles, J., and Zisserman, A. (2015). Flowing
convnets for human pose estimation in videos. In In-
ternational Conference on Computer Vision (ICCV).
Pfister, T., Simonyan, K., Charles, J., and Zisserman, A.
(2014). Deep convolutional neural networks for effi-
cient pose estimation in gesture videos. In Asian Con-
ference on Computer Vision (ACCV).
Pishchulin, L., Insafutdinov, E., Tang, S., Andres, B.,
Andriluka, M., Gehler, P., and Schiele, B. (2015).
Deepcut: Joint subset partition and labeling for
multi person pose estimation. arXiv preprint
arXiv:1511.06645.
Pishchulin, L., Jain, A., Andriluka, M., Thorm
¨
ahlen, T., and
Schiele, B. (2012). Articulated people detection and
pose estimation: Reshaping the future. In IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 3178–3185.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster
r-cnn: Towards real-time object detection with region
proposal networks. arXiv preprint arXiv:1506.01497.
Sapp, B. and Taskar, B. (2013). Modec: Multimodal de-
composable models for human pose estimation. In
IEEE Conference on Computer Vision and Pattern Re-
cognition (CVPR), pages 3674–3681.
Shotton, J., Sharp, T., Kipman, A., Fitzgibbon, A., Fi-
nocchio, M., Blake, A., Cook, M., and Moore, R.
(2013). Real-time human pose recognition in parts
from single depth images. Communications of the
ACM, 56(1):116–124.
Tompson, J., Goroshin, R., Jain, A., LeCun, Y., and Bregler,
C. (2015). Efficient object localization using convolu-
tional networks. In IEEE Conference on Computer
Vision and Pattern Recognition (CVPR), pages 648–
656.
Toshev, A. and Szegedy, C. (2014). Deeppose: Human pose
estimation via deep neural networks. In IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR).
Wei, S.-E., Ramakrishna, V., Kanade, T., and Sheikh, Y.
(2016). Convolutional pose machines. arXiv preprint
arXiv:1602.00134.
Yang, Y. and Ramanan, D. (2011). Articulated pose esti-
mation with flexible mixtures-of-parts. In IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 1385–1392.
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
342
