
Data-driven Enhancement of SVBRDF Reflectance Data
Heinz Christian Steinhausen, Dennis den Brok, Sebastian Merzbach, Michael Weinmann
and Reinhard Klein
Institute of Computer Science II, University of Bonn, Bonn, Germany
Keywords:
Appearance, Spatially Varying Reflectance, Reflectance Modeling, Digitization.
Abstract:
Analytical SVBRDF representations are widely used to represent spatially varying material appearance de-
pending on view and light configurations. State-of-the-art industry-grade SVBRDF acquisition devices al-
low the acquisition within several minutes. For many materials with a surface reflectance behavior exhibit-
ing complex effects of light exchange such as inter-reflections, self-occlusions or local subsurface scatter-
ing, SVBRDFs cannot accurately capture material appearance. We therefore propose a method to transform
SVBRDF acquisition devices to full BTF acquisition devices. To this end, we use data-driven linear models
obtained from a database of BTFs captured with a traditional BTF acquisition device in order to reconstruct
high-resolution BTFs from the SVBRDF acquisition devices’ sparse measurements. We deal with the high
degree of sparsity using Tikhonov regularization. In our evaluation, we validate our approach on several mate-
rials and show that BTF-like material appearance can be generated from SVBRDF measurements in the range
of several minutes.
1 INTRODUCTION
The accurate digitization of material appearance has
been a challenging task for decades. Reproducing
fine details of surface reflectance is crucial for a re-
alistic depiction of virtual objects and is of great im-
portance for many applications in entertainment, vi-
sual prototyping or product advertisement. Among
the widely used reflectance models are analytical
spatially varying bidirectional reflectance distribu-
tion functions (SVBRDFs) that model the surface re-
flectance behavior per surface point depending on the
view and light configurations. While the acquisition
of a sparse set of images taken under different view-
light configurations can be achieved within several
minutes, the dense information is obtained by means
of fitting analytical models to the reflectance samples
captured per surface point. For instance, in the re-
cent work by Nielsen et al. (Nielsen et al., 2015), a
Tikhonov regularized reconstruction is used to recon-
struct isotropic BRDFs from a sparse set of measure-
ments.
However, many materials such as leathers or fab-
rics show a more complex reflectance behavior in-
cluding fine effects of light exchange such as inter-
reflections, self-occlusions or local subsurface scat-
tering. These effects are not captured by energy-
conserving analytical BRDFs. Capturing these ef-
fects requires the use of more complex reflectance
representations such as bidirectional texture functions
(BTFs) (Dana et al., 1997). These are parameter-
ized on an approximate surface geometry and store
spatially varying reflectance behavior depending on
the view and light conditions in a data-driven man-
ner within non-energy-conserving apparent BRDFs
(aBRDFs) (Wong et al., 1997) per surface point.
While a dense sampling of the view and light con-
ditions is required to accurately capture these effects,
the acquisition becomes prohibitively costly with time
requirements in the order of several hours (Schwartz
et al., 2014). To reduce the acquisition effort to only
a few hours, den Brok et al. (den Brok et al., 2014)
introduced a patch-wise sparse BTF reconstruction
based on linear models obtained from a given BTF
database.
In this paper, we extend the Tikhonov regularized
sparse reconstruction framework for isotropic BRDFs
proposed by Nielsen et al. (Nielsen et al., 2015) to-
wards a more general reflectance reconstruction in-
cluding the aforementioned complex effects of light
transport. Similar to the work of den Brok et al. (den
Brok et al., 2014), we consider a prior in the form
of a given BTF database to derive basis vectors that
are used to represent materials in terms of a linear
combination of these vectors. However, in contrast
to the approach of den Brok et al. (den Brok et al.,
Steinhausen, H., Brok, D., Merzbach, S., Weinmann, M. and Klein, R.
Data-driven Enhancement of SVBRDF Reflectance Data.
DOI: 10.5220/0006628602730280
In Proceedings of the 13th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2018) - Volume 1: GRAPP, pages
273-280
ISBN: 978-989-758-287-5
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
273

2014) we do not perform a patch-wise reconstruction
of aBRDFs, but use the more memory-efficient point-
wise reconstruction of aBRDFs in combination with
the more robust Tikhonov regularized reconstruction
framework. This allows, in contrast to the approach
presented by Nielsen et al. (Nielsen et al., 2015), cap-
turing complex effects of light exchange within the
reflectance model.
In summary, the key contributions of our work are:
• the practical acquisition of BTFs using SVBRDF
acquisition devices and
• a Tikhonov-regularized sparse BTF reconstruc-
tion framework based on data-driven linear mod-
els.
2 RELATED WORK
While detailed surveys on appearance acquisition and
modeling are provided in the literature (M
¨
uller et al.,
2004; Filip and Haindl, 2009; Haindl and Filip, 2013;
Weinmann and Klein, 2015), we focus on the acquisi-
tion and modeling of spatially varying reflectance un-
der varying viewing and illumination conditions and
only briefly review the corresponding developments.
Reflectance Modeling and Acquisition: In this
context, Spatially Varying Bidirectional Reflectance
Distribution Functions (SVBRDFs) (Nicodemus
et al., 1977) and Bidirectional Texture Functions
(BTFs) (Dana et al., 1997) have been widely applied
in the literature. While SVBRDFs are parameterized
over the surface of a material in terms of storing
independent BRDFs at different locations, BTFs
represent the reflectance behavior w.r.t. a surface that
does not necessarily coincide with the exact surface.
This is advantageous when considering materials
such as fabrics or leather where the exact surface
cannot accurately be reconstructed as their fine
structures fall below the resolution of the acquisition
device. As BTFs furthermore only rely on appar-
ent BRDFs (Wong et al., 1997) where there is no
requirement of energy conservation for the BRDFs
stored on the surface, BTFs are capable of captur-
ing mesoscopic effects of light exchange such as
inter-reflections, self-occlusions or self-shadowing.
During the acquisition process, images need to be
taken from different views and under different illu-
mination conditions which mostly has been realized
based on simple camera-light source setups (Lensch
et al., 2001), gonioreflectometers (Dana et al., 1997;
Matusik et al., 2002; Marschner et al., 2005; Hol-
royd et al., 2010; Filip et al., 2013), arrays of cameras
and light sources (Furukawa et al., 2002; Weyrich
et al., 2006; Schwartz et al., 2011; Ruiters et al., 2012;
N
¨
oll et al., 2013; den Brok et al., 2014), combinations
of extended light sources and cameras (Aittala et al.,
2013) or mobile devices (Aittala et al., 2015).
Sparse Reflectance Acquisition: Instead of relying
on a dense sampling of the view-light configurations
that can be realized with the respective acquisition se-
tups, several techniques focus on faster and less costly
reflectance acquisition from only a suitable subset of
these configurations. The non-captured information
is interpolated based on certain models.
Such a sparse acquisition has e.g. been followed
by Matusik et al. (Matusik et al., 2003a), where a re-
flectance model based on linear combinations from
a set of densely sampled BRDF measurements has
been proposed. Similarly, another technique of Ma-
tusik et al. (Matusik et al., 2003b) relies on a BRDF
database that is used to compute a wavelet basis which
allows the representation of isotropic materials from
only about 5% of the original data.
Ruiters et al. (Ruiters et al., 2012) presented a
compact data-driven BRDF representation where a
set of separable functions is fitted to irregular angular
measurements. The exploitation of spatial coherence
of the reflectance function over the surface makes this
technique even capable of reconstructing the appear-
ance of specular materials from sparse measurements.
However, the technique is tailored to isotropic materi-
als and cannot be used for too coarse samplings where
analytical models are better suited.
Aiming at the compression of BTFs, Koudelka
et al. (Koudelka et al., 2003) used linear models
computed from apparent BRDFs per material. More
recent work by den Brok et al. (den Brok et al.,
2014) demonstrated that a sparse BTF acquisition can
be obtained for several materials from only about
6% of the view-light configurations taken into ac-
count by conventional setups. Alternatively, the
sparse acquisition of anisotropic SVBRDFs based on
manifold-bootstrapping has been proposed by Dong
et al. (Dong et al., 2010). Analytical BRDFs are fit-
ted to the data acquired for certain surface positions
and used for the construction of a manifold. Unfortu-
nately, the dimensionality of the manifold of per-texel
reflectance functions would be significantly higher for
BTFs.
Further work focused on sparse reflectance acqui-
sition based on logarithmic mappings of BRDFs of a
database. Nielsen et al. (Nielsen et al., 2015) focus on
BRDF reconstruction from an optimized set of view-
light-configurations by using a linear BRDF subspace
based on a logarithmic mapping of the MERL BRDF
GRAPP 2018 - International Conference on Computer Graphics Theory and Applications
274

database. This approach has been improved by using
priors (Xu et al., 2016) and by its application per point
on the material (Yu et al., 2016).
Zhou et al. (Zhou et al., 2016) approach sparse
SVBRDF acquisition by modeling reflectance in
terms of a convex combination over a set of certain
target-specific basis materials and sparse blend pri-
ors. Further sparse acquisition approaches include
the technique by V
´
avra and Filip (V
´
avra and Filip,
2016), that uses a database of isotropic slices, trained
from anisotropic BRDFs, to complement sparse mea-
surements of anisotropic BRDFs and the use of a
dictionary-based SVBRDF representation (Hui and
Sankaranarayanan, 2015). Only involving a mobile
device, Aittala at al. (Aittala et al., 2015) perform
SVBRDF reconstruction based on pairs of flash and
non-flash images. Their approach, however, heavily
relies on the stationarity of the texture of the consid-
ered materials and the extreme sparse sampling re-
sults in non-accurate material depictions. Steinhausen
et al. (Steinhausen et al., 2014), as well as Aittala et
al. (Aittala et al., 2016), propose the use of guided
texture synthesis on sparse reflectance data, the latter
relying on deep convolutional neural network statis-
tics.
In this work, we focus on the enhancement of
the reflectance representation resulting from a com-
mercially available state-of-the-art SVBRDF acqui-
sition device by replacing the local fitting of ana-
lytical BRDF functions by a Tikhonov-regularized
sparse reconstruction using data-driven linear mod-
els. This allows to consider non-local effects such as
inter-reflections, self-occlusions and local subsurface
scattering within the reflectance representation and,
hence, can be seen as an approach for sparse BTF ac-
quisition.
3 METHOD
Our approach for the digitization of material appear-
ance relies on taking a sparse set of images depicting
a material sample under different view/light configu-
rations with a state-of-the-art industry-grade acquisi-
tion device, and the subsequent Tikhonov-regularized
BTF reconstruction from these sparse measurements
using data-driven linear models (see Figure 1). Fur-
ther details on the individual steps are provided in the
following subsections.
3.1 Acquisition Setup
In this work, we used the recently released industry-
grade acquisition device TAC7 (X-Rite, 2016) (see
Figure 1) for the digitization of materials. This de-
vice is equipped with four monochromatic cameras
mounted on a hemispherical gantry at zenith angles
of 5.0
◦
, 22.5
◦
, 45.0
◦
and 67.5
◦
that observe the mate-
rial sample which is placed on a turntable in the center
of the gantry. Furthermore, 30 LED light sources are
mounted on the gantry and an additional movable lin-
ear light source is included for the acquisition of spec-
ular reflectance of the sample. In addition, a projector
is integrated in the setup so that the surface geometry
can be acquired based on structured light techniques.
While four colored LEDs in combination with spec-
tral filter wheels allow the acquisition of spectral re-
flectance behavior, we do not exploit this feature in
the scope of this paper.
The database D of densely sampled material BTFs
from which the linear models are derived is captured
with a traditional BTF acquisition device (Schwartz
et al., 2013). This device is equipped with a turntable,
which allows a dense azimuthal sampling, and eleven
cameras (resolution of 2048 × 2048 pixels) that are
mounted along an arc on an hemispherical gantry with
a diameter of about 2m, covering zenith angles be-
tween 0
◦
and 75
◦
with an angular increment of 7.5
◦
.
Furthermore, the gantry is equipped with 198 uni-
formly distributed light sources.
3.2 Data Acquisition
To gather reflectance samples for each surface point
with the TAC7, photos of the considered material
sample are taken under different turntable rotations
and illuminations for different exposure times. In-
volved parameters such as the rotation angles of the
turntable, the use of the linear light source or the num-
ber of exposure steps used for high dynamic range
(HDR) imaging can be specified by the user depend-
ing on the complexity of the surface geometry and
the reflectance behavior of the material to be ac-
quired. For instance, smaller rotation angles of the
turntable can be used for complex surface geome-
try or anisotropic reflectance behavior. Furthermore,
the linear light source can be moved in small angu-
lar increments to densely sample specular highlights
of highly specular materials. After the generation of
HDR images for different configurations of turntable
and illumination, these are projected onto the sur-
face geometry of the material sample. This allows to
gather reflectance samples per surface point for dif-
ferent configurations of view and illumination.
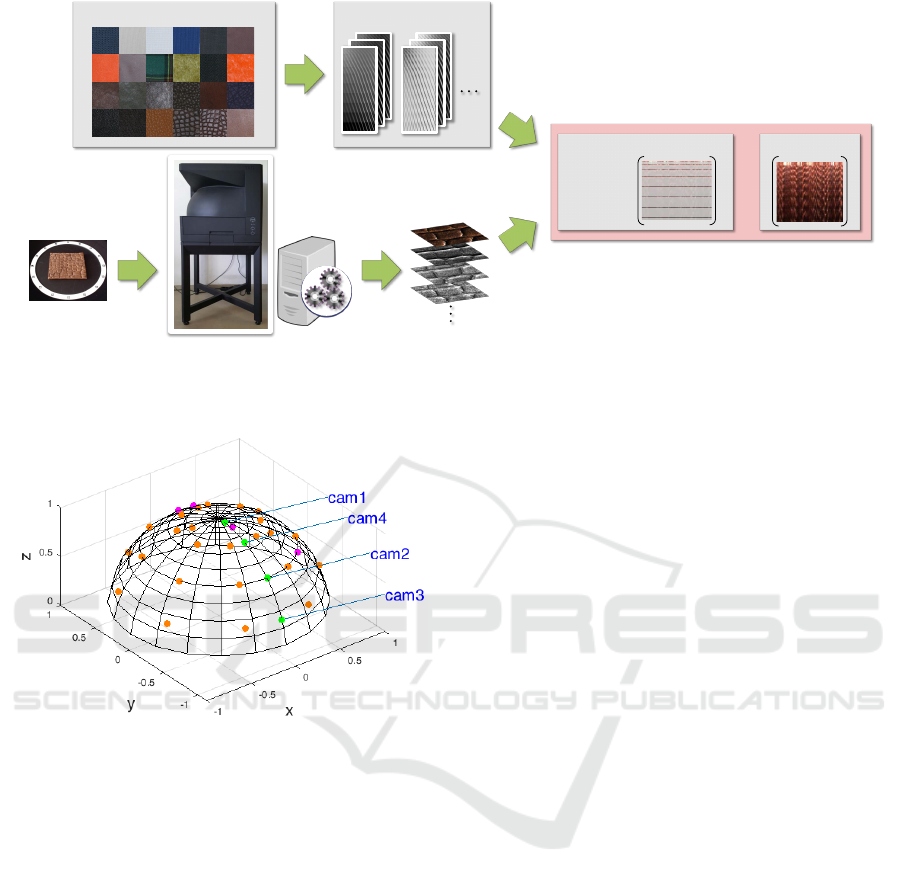
For our experiments, we took images using all
four cameras, the 28 monochrome LEDs for lumi-
nance and 4 colored LEDs for RGB image data. The
sampling is depicted in Figure 2. The turntable was
Data-driven Enhancement of SVBRDF Reflectance Data
275
≈
BTF
BTF / ABRDF Database Data-driven Linear Model
𝑈
Sparse Recovery
(𝑆𝑈)
−1
Sparse Measurement
𝐵
�
𝐷
𝐵
Figure 1: Overview of the proposed pipeline: Reflectance samples for a sparse set of view-light configurations are acquired
using the X-Rite TAC7 device (bottom row). They serve as input to the proposed Tikhonov-regularized sparse BTF recon-
struction using data-driven linear models.
Figure 2: Visualization of the captured view-light configu-
ration. Orange: 24 monochrome LEDs, magenta: 4 LEDs
with color filters, green: camera positions.
rotated between 0
◦
and 180
◦
in steps of 45
◦
or 30
◦
.
Measurement times were in the range of 30 − −40
minutes, while data processing for our chosen patch
size of 256 × 256 texels took up to 90 minutes (with-
out SVBRDF fitting).
3.3 BTF Reconstruction from Sparse
Samples
Instead of fitting an analytical Ward BRDF (Ward,
1992) to the sparse reflectance samples per surface
point as performed by the TAC7 software (X-Rite,
2016), we fit the sparsely measured data
˜
B to a
densely sampled data-driven linear model U, obtained
from a database D of material BTFs.
For the purpose of fitting the sparse TAC7 mea-
surements to the linear model, we represent the set of
n
s
sparsely measured samples
˜
B in terms of a matrix
product
˜
B = SB, (1)
where S denotes a binary sparse measurement ma-
trix with S ∈ {0, 1}
n
s
×n
lv
and SS
t
= 1 which selects
the TAC7 view-light configurations from the densely
sampled measurement B to be reconstructed, where
n
s
,n
lv
denote the number of view-light configurations
of the TAC7 device and the DOME II device, respec-
tively. To deal with the fact that the TAC7’s camera
and light source positions relative to the material sam-
ple do not coincide with those in the DOME II device,
we perform a simple nearest neighbor search on the
normalized positions of lights and cameras, mapping
each point in the TAC7’s coordinate space to the clos-
est light or camera in the database coordinate space.
This is encoded in the measurement matrix S. Note
that even for the TAC7 on its own, there are different
samplings for color and monochromatic images.
Assuming the existence of a suitable linear model
U that represents B well, i.e. B ≈ UV for suitable pa-
rameters V, we determine parameters from the sparse
measurement SB via
V = argmin
˜
V
kSU
˜
V −SBk
2
F
+ kR
˜
Vk
2
F
. (2)
The Tikhonov regularization term kR
˜
Vk
2
F
is included
to penalize implausible solutions. Similar to the work
on BRDF recovery from a sparse sampling by Nielsen
et al. (Nielsen et al., 2015), we use R = λ1, where λ
determines the weight of the regularization term. This
results in a penalization of large deviations from the
distribution of basis coefficients in the training data.
However, in contrast to the approach of Nielsen et
al. (Nielsen et al., 2015) that is designed for isotropic
BRDFs, we focus on the recovery of spatially varying
reflectance characteristics in terms of BTFs that in-
clude non-local effects of light exchange. Moreover,
GRAPP 2018 - International Conference on Computer Graphics Theory and Applications
276

Nielsen et al.’s method deals with multi-channel im-
ages by considering a single BRDF’s color channels
as completely different BRDFs in both the training
and the testing step. This does not apply to our sce-
nario, where we have to consider monochromatic and
color samples from different sample points simulta-
neously.
In the following, we provide more details on the
computation of the employed basis and the BTF re-
construction.
Basis Computation. Given a database D of BTF
measurements such as e.g. the materials introduced
by Weinmann et al. (Weinmann et al., 2014), where
each BTF is represented by a n
lv
× n
x
matrix and n
lv
and n
x
denote the number of view-light configurations
and the number of texels, respectively, we extract a
subset D
class
⊂ D for the material class under consid-
eration (e.g. leather, fabric, wool etc.). We concate-
nate the individual BTFs along the second dimension,
i.e. we generate a matrix whose columns contain all
of the individual aBRDFs stored within the different
BTFs. In order to later be able to consider monochro-
matic and color samples at once, we first convert the
RGB data to YUV color space and compute models
for each channel separately; the rationale will become
clear in the subsequent section on reconstruction. It is
well established that some kind of reduction of dy-
namic range is necessary in order to avoid obtaining
a model mostly concerned with modeling noise in the
highlight regions (cf. (Matusik et al., 2003b; Nielsen
et al., 2015)). Like den Brok et al. (den Brok et al.,
2014), we therefore scale the U and V channels with
the corresponding entries from the Y channel, and use
the logarithm of the Y channel, such that a pixel tuple
(y,u,v) becomes (logy,
u
/y,
v
/y).
As shown by den Brok et al. (den Brok et al.,
2014), a straight-forward approach for BTF basis
computation is given by the use of matrix factoriza-
tion techniques such as the (truncated) singular value
decomposition (SVD).
D
class
≈ UΣV
t
. (3)
In the following, for brevity we shall write U for UΣ.
The basis obtained that way is known to generalize
well up to some error measure ε for materials B not
contained in the database:
||UV − B|| < ε. (4)
Contrary to den Brok et al. (den Brok et al., 2014), we
use Tikhonov regularization instead of BTF patches
for regularization, which makes our method more
efficient in terms of computation time and memory
consumption. The huge size of the data, however,
still makes computing the exact truncated SVD on
D
class
impossible. Among the many ways to obtain
good approximations, we choose to follow den Brok
et al. (den Brok et al., 2015) and compute trun-
cated SVDs first for each training material, and subse-
quently merge the resulting models using eigenspace
merging.
Reconstruction. Given a sparse TAC7 measure-
ment
˜
B = SB, we first apply the same color space
transformation as above to the RGB part of the data.
The monochromatic images are assumed to be pure
luminance data (Y-channel of a YUV-triple), and we
only apply the logarithm. Because of the color space
transformation, we can now deal with each channel
separately, and therefore assume our measurement to
be of the form S
logY
B
logY
and S
{U,V }
B
{U,V }
. We can
then compute approximations B ≈ UV per channel
via
V = ((SU)
t
(SU) + R
t
R)
−1
(SU)
t
(SB). (5)
As mentioned before, the matrix R = λ1 is the
Tikhonov regularization term, where λ represents the
regularization strength. Note that according to den
Brok et al. (den Brok et al., 2015), a typical BTF’s
U,V channels have a much lower rank than the lumi-
nance channel; we can thus hope that the very sparse
RGB data from the TAC7 measurement will still suf-
fice for obtaining suitable model parameters.
4 RESULTS
In our experiments, focus on the material class
Leather, represented by 12 material samples as de-
picted in Figure 3. For BTF reconstruction, we leave
out the material to be reconstructed and compute the
linear model on the remaining 11 data sets. For the
presented samples, using 512 basis vectors per color
channel proved to be sufficient.
Reconstructions of size 256×256 texels were per-
formed on a server equipped with an Intel(R) Xeon(R)
E5-2650 CPU, operating at 2.00 GHz, with 128 GB of
RAM. Generating a BTF for one material sample took
up to ten minutes on this machine, which fits well to
the time the TAC7 software takes for computing an
SVBRDF for the same sample (≈ 12 – 15 minutes)
on a desktop computer equipped with an Intel Core
i7-4930 processor operating at 3.4 GHz and 32 GB of
RAM.
We tried two sampling strategies, involving sam-
ple rotations in steps of either 30
◦
or 45
◦
from 0
◦
to 180
◦
. This yields 480 monochrome and 80 color
images in the 45
◦
-setting and 672 monochrome and
Data-driven Enhancement of SVBRDF Reflectance Data
277

Figure 3: Overview of the samples in the material class Leather.
(a) Reference (photo) (b) 45
◦
;λ = (500,100) (c) 45
◦
;λ = (5000,100)
(d) SVBRDF (e) 30
◦
;λ = (500,100) (f) 30
◦
;λ = (5000,100)
Figure 4: Reference image acquired with the TAC7 (a) and corresponding renderings (b-f) of the material sample Leather10,
approximating lighting and viewing direction of the real capturing situation. For the rendering shown in (d), we used an
SVBRDF computed using the TAC7 software’s standard settings, fitting an isotropic Ward model to the measured data, while
(b), (c), (e) and (f) illustrate reconstruction results. We used an angular sampling of 45
◦
for the BTF reconstruction shown
in (b) and (c) and 30
◦
for (e) and (f). The middle and rightmost column illustrate the effects of varying weights λ for the
Tikhonov regularization term.
112 color images for 30
◦
. This corresponds to 2.14%
respectively 3.00% of the 26 136 images of a typ-
ical BTF measurement with the DOME II device
(Schwartz et al., 2011). In Figure 4, we provide ren-
derings of the material sample Leather10 for both
sampling strategies in comparison to a rectified, HDR
combined input image taken using approximately the
same viewpoint and lighting direction, as well as a
rendering from an SVBDRF reconstruction, produced
by the software pipeline accompanying the TAC7.
One can observe that the reconstruction result is
quite sensitive to the choice of λ weighting the reg-
ularization term, especially for the luminance chan-
nel. Figure 4 demonstrates this effect by compar-
ing results at λ = (500, 100) (luminance, color) and
λ = (5000,100). A weight of 5000 for the luminance
GRAPP 2018 - International Conference on Computer Graphics Theory and Applications
278

component proved to be sufficient, as higher weights
did not influence the resulting quality significantly.
For the color component, results become stable al-
ready at λ ≥ 100.
The visible effect that the highlights in the re-
constructions are less pronounced than e.g. in the
SVBRDF with its fitted lobe are due to the resampling
and compression which took place in preparation of
the database.
5 CONCLUSIONS AND
OUTLOOK
We have presented a method for turning industrial
SVBRDF acquisition devices like the X-rite TAC7 to
full BTF capturing devices by means of sparse recon-
struction techniques, thereby combining the speed of
SVBRDF acquisition with the meso-scale accuracy of
BTFs. Compared to the measurement time required
when using common devices like the DOME II, rang-
ing around 20 hours, our approach using a ready-to-
buy device allows to achieve a usable BTF within
under two hours, including image acquisition (≤ 40
minutes), data processing (≤ 90 minutes) and fitting
(≈ 10 minutes).
Limitations are especially in the method’s ability
to model specular highlights which might be missed
due to the coarse angular sampling. A logical next
step would be to evaluate the applicability of our re-
construction technique to further material classes.
Another use of the TAC7’s special capabilities
could be BTF spectralization, using the different com-
binations of LEDs and filters to improve the accuracy
in methods for spectral reflectance acquisition such as
the method by Dong et al. (Dong et al., 2016).
Another possible enhancement, following Nielsen
et al. (Nielsen et al., 2015), as well as den Brok et
al. (den Brok et al., 2014) would be to optimize the
choice of TAC7 sampling directions depending on the
material class.
ACKNOWLEDGEMENTS
The authors wish to thank the X-Rite office in Bonn
for helpful advice on operating the TAC7 device.
REFERENCES
Aittala, M., Aila, T., and Lehtinen, J. (2016). Reflectance
modeling by neural texture synthesis. ACM Trans.
Graph., 35(4):65:1–65:13.
Aittala, M., Weyrich, T., and Lehtinen, J. (2013). Practi-
cal SVBRDF capture in the frequency domain. ACM
Transactions on Graphics (Proc. SIGGRAPH), 32(4).
Aittala, M., Weyrich, T., and Lehtinen, J. (2015). Two-
shot SVBRDF capture for stationary materials. ACM
Transactions on Graphics (TOG), 34(4):110.
Dana, K. J., Nayar, S. K., van Ginneken, B., and Koen-
derink, J. J. (1997). Reflectance and texture of real-
world surfaces. In 1997 Conference on Computer Vi-
sion and Pattern Recognition (CVPR ’97), June 17-19,
1997, San Juan, Puerto Rico, pages 151–157. IEEE
Computer Society.
den Brok, D., Steinhausen, H. C., Hullin, M. B., and Klein,
R. (2014). Patch-based sparse reconstruction of mate-
rial BTFs. Journal of WSCG, 22(2):83–90.
den Brok, D., Weinmann, M., and Klein, R. (2015). Linear
models for material BTFs and possible applications.
In Proceedings of the Eurographics Workshop on Ma-
terial Appearance Modeling: Issues and Acquisition,
pages 15–19. Eurographics Association.
Dong, W., Shen, H.-L., Du, X., Shao, S.-J., and Xin, J. H.
(2016). Spectral bidirectional texture function recon-
struction by fusing multiple-color and spectral im-
ages. Appl. Opt., 55(36):10400–10408.
Dong, Y., Wang, J., Tong, X., Snyder, J., Lan, Y., Ben-Ezra,
M., and Guo, B. (2010). Manifold bootstrapping for
SVBRDF capture. ACM Trans. Graph., 29(4):98:1–
98:10.
Filip, J. and Haindl, M. (2009). Bidirectional texture func-
tion modeling: A state of the art survey. Pattern Anal-
ysis and Machine Intelligence, IEEE Transactions on,
31(11):1921–1940.
Filip, J., V
´
avra, R., Haindl, M.,
ˇ
Zid, P., Krupi
ˇ
cka, M., and
Havran, V. (2013). BRDF slices: Accurate adaptive
anisotropic appearance acquisition. pages 1468–1473.
Furukawa, R., Kawasaki, H., Ikeuchi, K., and Sakauchi, M.
(2002). Appearance based object modeling using tex-
ture database: Acquisition, compression and render-
ing. pages 257–266.
Haindl, M. and Filip, J. (2013). Visual Texture: Accu-
rate Material Appearance Measurement, Representa-
tion and Modeling. Springer.
Holroyd, M., Lawrence, J., and Zickler, T. (2010). A coax-
ial optical scanner for synchronous acquisition of 3D
geometry and surface reflectance. ACM Transactions
on Graphics (TOG), 29(4):99.
Hui, Z. and Sankaranarayanan, A. C. (2015). A dictionary-
based approach for estimating shape and spatially-
varying reflectance. In 2015 IEEE International
Conference on Computational Photography (ICCP),
pages 1–9.
Koudelka, M. L., Magda, S., Belhumeur, P. N., and Krieg-
man, D. J. (2003). Acquisition, compression, and
synthesis of bidirectional texture functions. In ICCV
Workshop on Texture Analysis and Synthesis.
Lensch, H. P. A., Kautz, J., Goesele, M., Heidrich, W.,
and Seidel, H.-P. (2001). Image-based reconstruc-
tion of spatially varying materials. In Gortler, S. J.
and Myszkowski, K., editors, Rendering Techniques
2001: Proceedings of the Eurographics Workshop in
Data-driven Enhancement of SVBRDF Reflectance Data
279

London, United Kingdom, June 25–27, 2001, pages
103–114, Vienna. Springer Vienna.
Marschner, S. R., Westin, S. H., Arbree, A., and Moon,
J. T. (2005). Measuring and modeling the appearance
of finished wood. ACM Transactions on Graphics,
24(3):727–734.
Matusik, W., Pfister, H., Brand, M., and McMillan, L.
(2003a). A data-driven reflectance model. ACM
Trans. Graph., 22(3):759–769.
Matusik, W., Pfister, H., Brand, M., and McMillan, L.
(2003b). Efficient isotropic BRDF measurement. In
Proceedings of the 14th Eurographics Workshop on
Rendering, EGRW ’03, pages 241–247, Aire-la-Ville,
Switzerland, Switzerland. Eurographics Association.
Matusik, W., Pfister, H., Ziegler, R., Ngan, A., and McMil-
lan, L. (2002). Acquisition and rendering of transpar-
ent and refractive objects. pages 267–278.
M
¨
uller, G., Meseth, J., Sattler, M., Sarlette, R., and Klein,
R. (2004). Acquisition, synthesis and rendering of
Bidirectional Texture Functions. pages 69–94. INRIA
and Eurographics Association, Aire-la-Ville, Switzer-
land.
Nicodemus, F., Richmond, J., Hsia, J., Ginsberg, I., and
Limperis, T. (1977). Geometrical considerations and
nomenclature for reflectance, natl. Bur. of Stand.
Monogr, 160.
Nielsen, J. B., Jensen, H. W., and Ramamoorthi, R. (2015).
On optimal, minimal BRDF sampling for reflectance
acquisition. ACM Trans. Graph., 34(6):186:1–186:11.
N
¨
oll, T., J., K., Reis, G., and Stricker, D. (2013). Faithful,
compact and complete digitization of cultural heritage
using a full-spherical scanner. pages 15–22.
Ruiters, R., Schwartz, C., and Klein, R. (2012). Data driven
surface reflectance from sparse and irregular samples.
Computer Graphics Forum (Proc. of Eurographics),
31(2):315–324.
Schwartz, C., Sarlette, R., Weinmann, M., and Klein, R.
(2013). DOME II: A parallelized BTF acquisition sys-
tem. In Proceedings of the Eurographics Workshop
on Material Appearance Modeling, pages 25–31. The
Eurographics Association.
Schwartz, C., Sarlette, R., Weinmann, M., Rump, M., and
Klein, R. (2014). Design and implementation of prac-
tical bidirectional texture function measurement de-
vices focusing on the developments at the university
of Bonn. Sensors, 14(5).
Schwartz, C., Weinmann, M., Ruiters, R., and Klein, R.
(2011). Integrated high-quality acquisition of geome-
try and appearance for cultural heritage. pages 25–32.
Steinhausen, H. C., den Brok, D., Hullin, M. B., and Klein,
R. (2014). Acquiring bidirectional texture functions
for large-scale material samples. Journal of WSCG,
22(2):73–82.
V
´
avra, R. and Filip, J. (2016). Minimal sampling for ef-
fective acquisition of anisotropic BRDFs. Computer
Graphics Forum, 35(7):299–309.
Ward, G. J. (1992). Measuring and modeling anisotropic
reflection. ACM SIGGRAPH Computer Graphics,
26(2):265–272.
Weinmann, M., Gall, J., and Klein, R. (2014). Material
classification based on training data synthesized us-
ing a BTF database. In Computer Vision - ECCV
2014 - 13th European Conference, Zurich, Switzer-
land, September 6-12, 2014, Proceedings, Part III,
pages 156–171. Springer International Publishing.
Weinmann, M. and Klein, R. (2015). Advances in geome-
try and reflectance acquisition (course notes). In SIG-
GRAPH Asia 2015 Courses, SA ’15, pages 1:1–1:71,
New York, NY, USA. ACM.
Weyrich, T., Matusik, W., Pfister, H., Bickel, B., Donner,
C., Tu, C., McAndless, J., Lee, J., Ngan, A., Jensen,
H. W., and Gross, M. (2006). Analysis of human faces
using a measurement-based skin reflectance model.
ACM Transactions on Graphics, 25:1013–1024.
Wong, T.-T., Heng, P.-A., Or, S.-H., and Ng, W.-Y. (1997).
Image-based rendering with controllable illumination.
In Proceedings of the Eurographics Workshop on Ren-
dering Techniques ’97, pages 13–22, London, UK,
UK. Springer-Verlag.
X-Rite (2016). Tac7.
http://www.xrite.com/categories/Appearance/tac7.
accessed at 1st June 2017.
Xu, Z., Nielsen, J. B., Yu, J., Jensen, H. W., and Ramamoor-
thi, R. (2016). Minimal BRDF sampling for two-shot
near-field reflectance acquisition. ACM Trans. Graph.,
35(6):188:1–188:12.
Yu, J., Xu, Z., Mannino, M., Jensen, H. W., and Ramamoor-
thi, R. (2016). Sparse Sampling for Image-Based
SVBRDF Acquisition. In Klein, R. and Rushmeier,
H., editors, Workshop on Material Appearance Mod-
eling. The Eurographics Association.
Zhou, Z., Chen, G., Dong, Y., Wipf, D., Yu, Y., Snyder,
J., and Tong, X. (2016). Sparse-as-possible SVBRDF
acquisition. ACM Trans. Graph., 35(6):189:1–189:12.
GRAPP 2018 - International Conference on Computer Graphics Theory and Applications
280
