
Combined Framework for Real-time Head Pose Estimation using Facial
Landmark Detection and Salient Feature Tracking
Jilliam Mar
´
ıa D
´
ıaz Barros
1,2,∗
, Frederic Garcia
1
, Bruno Mirbach
1
,
Kiran Varanasi
2
and Didier Stricker
2
1
PTU Optical, IEE S.A., Contern, Luxembourg
2
German Research Center for Artificial Intelligence (DFKI), Kaiserslautern, Germany
Keywords:
Head Pose Estimation, Real Time, Fusion.
Abstract:
This paper presents a novel approach to address the head pose estimation (HPE) problem in real world and
demanding applications. We propose a new framework that combines the detection of facial landmarks with
the tracking of salient features within the head region. That is, rigid facial landmarks are detected from a given
face image, while at the same time, salient features are detected within the head region. The 3D coordinates of
both set of features result from their intersection on a simple geometric head model (e.g., cylinder or ellipsoid).
We then formulate the HPE problem as a perspective-n-point problem that we separately solve by minimizing
the reprojection error of each 3D features set and their corresponding facial or salient features in the next face
image. The resulting head pose estimations are then combined using Kalman Filter, which allows us to take
advantage of the high accuracy when using facial landmarks while enabling us to handle extreme head poses
by using salient features. Results are comparable to those from the related literature, with the advantage of
being robust under real world situations that might not be covered in the evaluated datasets.
1 INTRODUCTION
Monitoring the attention of human users by automatic
tracking of their head pose is of fundamental impor-
tance in many areas: psychological analysis, assist-
ing patients with disability, behavior understanding
of children with autism, driver monitoring, etc. It
is also relevant in assessing human performance in
areas which warrant critical attention: factory moni-
toring, production pipelines, security, among others.
For some of these applications, automatic head pose
estimation (HPE) can be followed by gaze analy-
sis, e.g., for driver monitoring, as it can help to de-
tect when the person is drowsy or distracted and assist
the driver by alerting with an immediate warning.
However, computer vision systems for HPE still face
serious challenges in deployment for real world situa-
tions.
Firstly, any HPE system has to work for a wide
range of human users, without any requirement for
an additional calibration step. Secondly, it needs to
use simple hardware that does not consume a lot of
∗
This work is funded by the National Research Fund,
Luxembourg. Project ID 9235599.
power. This currently rules out computationally in-
tensive models that require GPUs. Thirdly, the system
has to be extremely fast in order to assess the situation
in real-time. Fourthly, it should be able to launch the
estimation task without pose constraints, e.g., that the
person should be facing the camera. Finally, the sys-
tem has to work for a wide range of head pose orien-
tations, face occlusions, and external lighting condi-
tions. Hence, a fast and efficient HPE system remains
an active area of research.
In the recent past, several HPE approaches have
been proposed using RGB to depth data, as well
as thermal IR cameras, in monocular and stereo se-
tups (Baker et al., 2004; Borghi et al., 2017; Cheng
et al., 2007; Guo et al., 2006; Murphy-Chutorian
and Trivedi, 2010; Zhu and Fujimura, 2004). Apart
from estimating 3D head pose, some systems are also
able to track human facial expressions in real-time.
However, many of these approaches still suffer from
limitations such as sensitivity to illumination changes,
increasing costs, or difficulty to integrate into a real
scenario. The latter is the case of depth cameras,
that has also the downside of not being suitable for
gaze estimation. Keeping that in mind, we focus our
investigation on HPE from intensity (monochrome)
Barros, J., Garcia, F., Mirbach, B., Varanasi, K. and Stricker, D.
Combined Framework for Real-time Head Pose Estimation using Facial Landmark Detection and Salient Feature Tracking.
DOI: 10.5220/0006628701230133
In Proceedings of the 13th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2018) - Volume 5: VISAPP, pages
123-133
ISBN: 978-989-758-290-5
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
123

images, where gaze could also be recovered in a
separate follow-up project.
We present a novel HPE approach which inte-
grates a tracking-by-detection scheme using facial
landmarks, with a salient-features tracking method.
Facial landmarks are detected using a machine
learning system, that effectively provides the co-
rresponding 2D pixel locations of these points. How-
ever, these locations may be inaccurate or missing due
to certain head poses or (self-)occlusions. To address
these cases, we introduce a scheme that detects and
tracks salient features on the acquired video frame se-
quences. These features can be person-specific facial
birthmarks, wrinkles, hair or accessories that can pro-
vide alternative source of information for head pose
estimation.
More in detail, we extract two sets of 2D features,
one of 2D facial landmarks and one of salient features
on the detected face. The two sets are projected onto a
simple geometric 3D model through ray-tracing, and
thus hypothesized in 3D space. Then, the respective
2D correspondences are computed on the next frame,
running face alignment for the first set and optical
flow for the second. Consequently, two head poses
are estimated, by minimizing the image reprojection
error with the 3D-2D correspondences, each with six
degrees of freedom (DoF). Finally, we combine both
poses using a dedicated Kalman filter.
The main contributions of our work are:
• A novel framework for HPE combining the rela-
tive strengths of facial landmark detection and
salient feature tracking, through fusion with a
dedicated Kalman filter.
• A novel approach for refined initialization of the
head pose when it is different to frontal, using the
2D facial landmarks detected in the input image
and a set of 3D facial landmarks, when the pose is
frontal.
2 RELATED WORK
HPE is an extended researched topic in computer vi-
sion, spanning in the literature approaches based on
diverse technologies. Video-based methods are com-
prised in the survey conducted in (Murphy-Chutorian
and Trivedi, 2009). New approaches based on depth
data have been proposed in (Fanelli et al., 2011;
Fanelli et al., 2013; Meyer et al., 2015; Papazov et al.,
2015; Borghi et al., 2017), as well as combined me-
thods using both RGB and depth data (Baltru
ˇ
saitis
et al., 2012; Saeed and Al-Hamadi, 2015), or IR and
depth data (Schwarz et al., 2017).
Following the categorization used in (Borghi
et al., 2017), we classify the HPE approaches in three
groups: model-based, appearance-based and 3D head
model registration approaches. This classification
should not be considered absolute, as there might be
methods that fall in more than one category.
Model-based Approaches. They utilize prior infor-
mation regarding the geometry of the head, including
detection of facial landmarks and the use of rigid or
non-rigid face models. Feature-based HPE me-thods
that rely on facial landmarks, e.g., nose tip or eyes
corners, need them to be detected in every frame and
can be sensitive to extreme head poses, partial occlu-
sions, facial expressions and low resolution images.
(La Cascia et al., 2000) presented a method for 3D
HPE using a cylindrical head model, based on regis-
tration of texture map images. (Kumano et al., 2009)
presented an approach which used a face model given
by a variable-intensity template with a particle filter,
to estimate the pose and facial expression simultane-
ously. (Jang and Kanade, 2008; Jang and Kanade,
2010) proposed an user-specific head tracking frame-
work using a cylinder head model (CHM). The es-
timated motion and a pose retrieved from a dataset
of SIFT feature points were combined into a pipeline
with Kalman Filter. (Choi and Kim, 2008) introduced
a framework using templates, combining a particle fil-
ter with an ellipsoidal head model (EHM). The 3D
motion parameters were initialized using active ap-
pearance model (AAM) and an online appearance
model was used as the observation model. (Sung
et al., 2008) presented a pipeline combining the AAM
with a CHM. (An and Chung, 2008) used an EHM
for HPE and face recognition. The pose estimation
was formulated as a linear system assuming a rigid
body motion under perspective projection. (Valenti
et al., 2009; Valenti et al., 2012) introduced a pipeline
for HPE with CHM and eye tracking. They were cal-
culated and updated based upon a crossed feedback
mechanism, which compensated the estimated val-
ues and allowed to re-initialize the head pose tracker.
(Asteriadis et al., 2010) performed the estimation task
using a facial-feature tracker with Distance Vector
Fields (DVFs). (Kun et al., 2013) estimated 2D
salient points and their location on the 3D space with
an EHM. The face was detected in each frame, in or-
der to set the area for feature extraction and corre-
spondences estimation. POSIT and the Perspective-
n-Point problem were employed to estimate the pose
from the 3D-2D correspondences. (Prasad and Ar-
avind, 2010) implemented a parametrized 3D face
mask to model the head and extract feature points us-
ing SIFT. Similarly to the previous method, the pose
was estimated with POSIT from the 3D-2D corre-
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
124

spondences. (Diaz Barros et al., 2017), random fea-
ture points were employed to estimate the pose. The
features were tracked using optical flow and the re-
spective 3D points were computed using a geometric
model. The pose was recovered by minimizing the
reprojection error of the 3D features and the 2D cor-
respondences. (Vicente et al., 2015) proposed an ap-
proach oriented to driver’s activities monitoring. Fa-
cial landmarks were detected and tracked using a fa-
cial alignment scheme with parameterized appearance
models (PAMs). The head pose was estimated by
minimizing the reprojection error, in this case from
a 3D deformable head model and the tracked facial
landmarks. (Yin and Yang, 2016) introduced a real-
time HPE method optimized for on-board computers.
The face was detected using pixel intensity binary
test, while pose regression along with local binary
feature were utilized for the alignment. The pose is
retrieved by solving the 2D-3D correspondences us-
ing a rigid face model.
Appearance-based Approaches. These methods use
machine learning techniques to estimate the pose,
based on visual features of the face appearance.
The methods are robust to large head rotation, but
generally the output comes from a classifier which
uses discrete head poses for training and thus assigns
the pose to a specific range, instead of continuous
estimation. These methods usually perform better
for low-resolution face images (Ahn et al., 2014;
Drouard et al., 2015). (Wang et al., 2012) introduced
a head tracking approach using invariant keypoints.
A learning scheme was implemented, combining
simulation techniques with normalization. In (Fanelli
et al., 2011), the head pose as well as some facial fea-
tures were estimated with random regression forests
from depth data. A voting scheme was implemented,
where patches from different parts of the depth face
image were used to recover the pose. A large dataset
with annotated data was necessary for training.
(Ahn et al., 2014) proposed a deep-learning-based
approach for HPE from RGB images. A particle
filter was included to refine and increase stability on
the estimated pose. (Liu et al., 2016) presented a
pipeline for head pose estimation from RGB images
using convolutional neural networks, where HPE was
formulated as a regression problem. The network
was trained using a large synthetic dataset obtained
from rendered 3D head models. Both (Ahn et al.,
2014) and (Liu et al., 2016) required a GPU to
achieve real-time performance. (Borghi et al., 2017)
introduced a real time deep learning approach for
upper-body and head pose estimation from depth
images. The proposed regression neural network,
POSEidon, integrated depth with motion features
and appearance. On the other hand, (Schwarz et al.,
2017) presented a deep learning method for HPE
under driving conditions, by fusing IR and depth data
with cross-stitch units.
3D Head Model Registration Approaches. They
register a 3D head model with the measured input
data. (Ghiass et al., 2015) presented an approach
for HPE from RGB-D data. The pose estimation
was performed through a fitting process employing a
3D morphable model. (Papazov et al., 2015) intro-
duced a method for HPE from depth data using tri-
angular surface patch (TSP) descriptors. The input
head data is divided in several patches and each one
is matched with TSP descriptors from synthetic head
models stored in a database. A voting scheme is then
implemented from the patches to recover the head
pose. (Jeni et al., 2017) presented an approach for
3D registration of a dense face mesh from 2D images
through a cascade regression framework. This frame-
work was trained using a database of high-resolution
3D face scans. The head pose and the 3D shape
were iteratively refined, by registering a part-based
deformable 3D model on 2D facial landmarks.
Other methods formulate an optimization prob-
lem to estimate the pose. For instance, (Morency
et al., 2008) proposed a probabilistic scheme,
GAVAM: Generalized Adaptive View-based Appear-
ance Model, using an EHM. Pose was extracted by
solving a linear system with normal flow constraint
(NFC). (Baltru
ˇ
saitis et al., 2012) proposed an exten-
sion of GAVAM, by combining a head pose tracker
with a 3D constrained local model. The framework
used both depth data and intensity information to
track facial feature points, but it was also tested us-
ing only intensity images. (Saragih et al., 2011)
presented a method for HPE by fitting a deformable
model, using an optimization strategy through a non-
parametric representation of the likelihood maps of
landmarks locations. In (Drouard et al., 2015), a
Gaussian mixture of locally-linear mapping model is
used to map HOG features extracted on a face region
to 3D head poses. The approach was suitable for HPE
from low-resolution data.
We propose a model-based HPE approach using
only intensity images, where facial landmarks are ex-
tracted in each frame and salient features on the area
of the face are tracked through the entire video se-
quence. Thus, we extend the working range of facial-
landmarks-based approaches to extreme head poses,
being able to handle (self-)occlusions. Moreover, our
method does not require the person to perform an ini-
tialization step, e.g., face the camera frontally, an im-
portant constraint in several applications.
Combined Framework for Real-time Head Pose Estimation using Facial Landmark Detection and Salient Feature Tracking
125

3 PROPOSED HPE FRAMEWORK
HPE approaches based on facial landmarks seem to
reach high HPE performances (Baltru
ˇ
saitis et al.,
2012; Jeni et al., 2017), as reported in Section 4.
However, some of these approaches fail as soon as
the face is partially or totally occluded. On the other
side and despite the cumulated error along frames,
the use of salient features (Diaz Barros et al., 2017)
seems to be an appropriate solution in case the face
detector fails. We thus propose a new framework for
HPE (see Figure 1) that combines the use of both fa-
cial landmarks (purple box in Figure 1) and salient
features (green box). By doing so, we take advan-
tage of the HPE accuracy given by the use of facial
landmarks while being able to handle extreme head
poses, in which the face might be partially or totally
occluded. Each set of feature points are back pro-
jected onto a simple 3D geometric shape, either an
EHM or a CHM (yellow box in Figure 1). Moreover,
we compute the 2D correspondences for each set of
features in the next frame.
We formulate the HPE as a Perspective-n-Point
problem, that we separately solve by minimizing the
reprojection error between each set of features, facial
landmarks and salient features, with their correspond-
ing locations in the 3D space. The final HPE results
from the combination of the resulting head poses us-
ing a dedicated Kalman Filter (blue box in Figure 1).
3.1 Robust Facial Landmarks
Facial landmarks p
FL
result from the alignment of fa-
cial features (Kazemi and Sullivan, 2014) on a de-
tected face image. Only those facial landmarks that
are less prone to be affected by facial expressions
or self-occlusion are considered in the set of facial
landmarks, i.e., eye corners, nostrils, and nose tip.
The reader is free to use any available face detector
method, being the Viola and Jones face detector (Vi-
ola and Jones, 2001) one of the most commonly em-
ployed, e.g., in (Baltru
ˇ
saitis et al., 2012; Ghiass et al.,
2015; Diaz Barros et al., 2017). With regards to
the alignement of the facial landmarks, we propound
to use regression trees as in (Kazemi and Sullivan,
2014), from a sparse subset of intensity values in-
dexed to an initial estimate of the shape. By doing
so, we are able to retrieve in real-time the set of fa-
cial landmarks displayed in Figure 2, as long as the
face is detected. However, a problem might arise for
extreme head rotations or (self-)occlusions, since the
pose cannot be retrieved in case the facial landmarks
are not available.
3.2 Robust Salient Features
Salient features p
SF
are the result of a machine
learning-based corner-detection algorithm on the re-
gion of interest (ROI), corresponding to the bound-
ing box enclosing the human head. From our experi-
ence, FAST (Rosten et al., 2010) seems to be an ap-
propriate approach since, aside from being very well
suited for real-time applications, it provides accurate
enough corners. Similarly to (Diaz Barros et al.,
2017), we also weight each feature according to its lo-
cation within the ROI. That is, salient features further
away from the ROI border are treated as more reliable
and with greater weight, enabling us to reject outliers
and/or non-reliable features. This feature weighted
scheme results from applying the distance transform
onto the ROI, i.e., each pixel within the ROI has a
normalized weight related to the Euclidean distance
to the closest boundary.
3.3 System Initialization
More recent HPE estimation approaches are based on
adaptive 3D face models (Baltru
ˇ
saitis et al., 2012;
Meyer et al., 2015) that despite they might provide
a better performance, they are more computationally
and hardware demanding. We propose instead to use
a simple geometric head model such as a cylindrical
(CHM) or an ellipsoidal (EHM) head model, avoiding
the use of dedicated hardware devices, e.g., GPUs,
while still having a very decent performance. Since
the EHM has a better representation of the human
head than the CHM, in the following we will only re-
fer to the EHM as geometric head model.
In order to initialize the suggested EHM, we need
first to detect the facial landmarks described in Sec-
tion 3.1. Indeed, the EHM dimensions are linked to
the width and height of the detected face.
The second step corresponds to the initialization
of the 3D geometric model using the aligned facial
landmarks. This model is scaled with regard to the
detected face. The scaling and the initial location of
the head in the 3D space are based on the assumption
that the distance between the eyes is 60 mm. This
value is an approximative distance obtained from an-
thropometric measurements, which average the mean
interpupillary distance δ
mm
to 64.7 mm for men and
62.3 mm for women (Dodgson, 2004; Gordon et al.,
1989). From the detected facial landmarks, we extract
the midpoint of the outline of each eye and measure
the interpupillary distance in pixels δ
px
between
them. We then compute the distance Z
eyes
from the
optical center of the camera C to the baseline of the
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
126
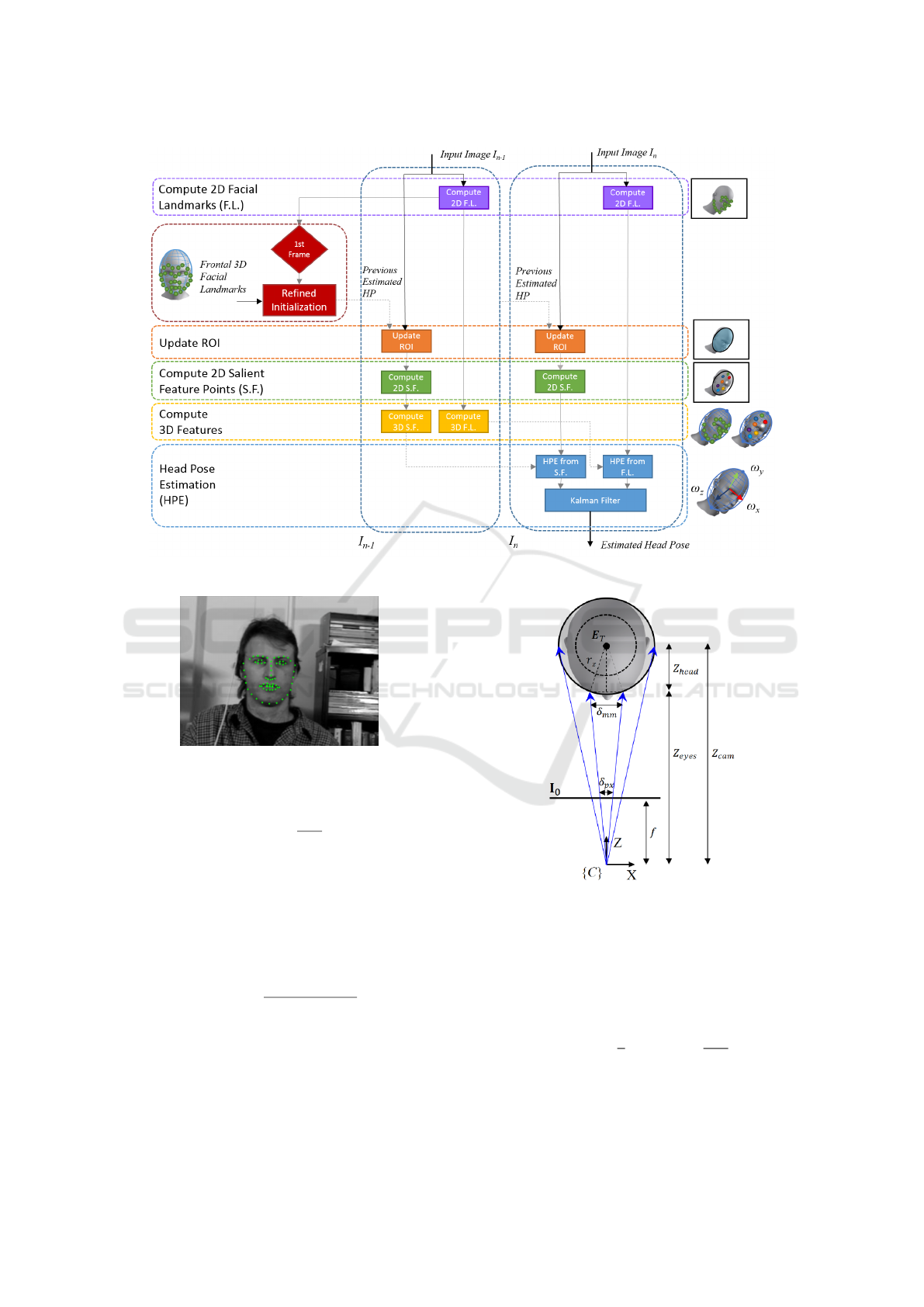
Figure 1: Pipeline of the proposed HPE approach.
Figure 2: Facial landmarks aligned to a detected face.
eyes, which is given by:
Z
eyes
= f ·
δ
mm
δ
px
, (1)
with f being the focal length of the camera (see
Figure 3).
The distance from C to the vertical axis of the
ellipsoid results from the sum of Z
eyes
and the dis-
tance from the eyes’ baseline to the axis of the ellip-
soid Z
head
, i.e., Z
cam
= Z
eyes
+ Z
head
(Figure 3). Z
head
corresponds to:
Z
head
=
q
r
z
2
− (δ
mm
/2)
2
, (2)
where r
z
is the radius of the ellipsoid in the Z axis.
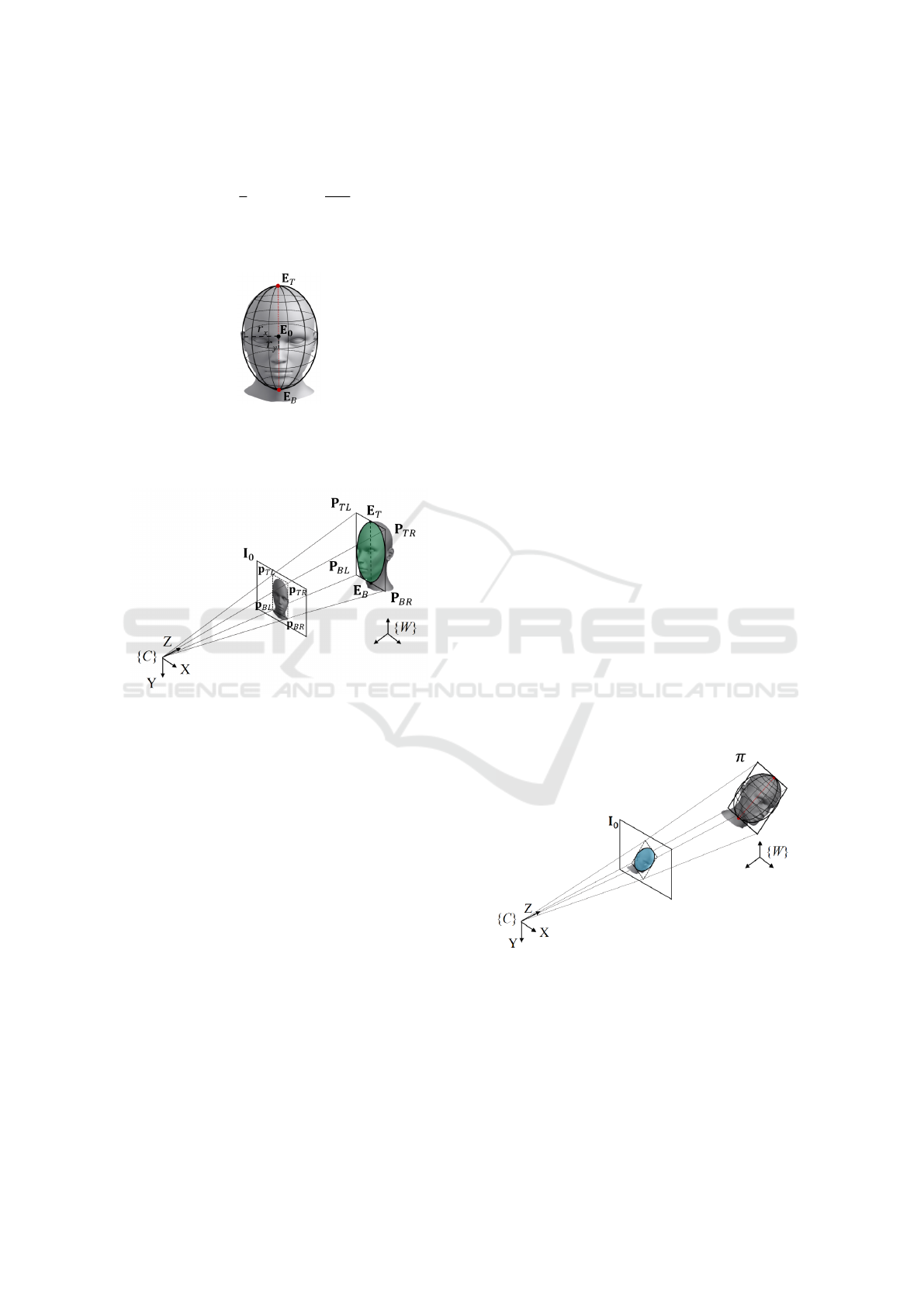
The 2D bounding box of the face, enclosed by
points {p
T L
, p
T R
, p
BL
, p
BR
}, is computed from the outer
facial landmarks. We use this box to calculate the
width and height of the EHM. The radii r
x
and r
z
are
Figure 3: EHM Depth Estimation.
set equal to half of the width of the detected face, and
r
y
to half of the height of the face, having as a result
a prolate ellipsoid, or spheroid, as shown in Figure 4.
That is,
r
x
= r
z
=
1
2
|p
T R
− p
T L
| ·
δ
mm
δ
px
, (3)
where p
T R
and p
T L
correspond to the top right and top
left corners of the bounding box. On the other hand,
Combined Framework for Real-time Head Pose Estimation using Facial Landmark Detection and Salient Feature Tracking
127
r
y
is given by:
r
y
=
1
2
|p
T R
− p
BR
| ·
δ
mm
δ
px
(4)
with p
BR
being the bottom right corner of the bound-
ing box.
Figure 4: Ellipsoidal head model.
The initialization of the EHM is depicted in Fi-
gure 5.
Figure 5: Initialization of EHM.
As can be observed, the estimation of the head
pose is given by its location (t = [t
x
,t
y
,t
z
]), and its ori-
entation (ω = [ω
x
,ω
y
,ω
z
]) with respect to the X, Y
and Z perpendicular axes of a known coordinate sys-
tem. The rotation angles, ω
x
, ω
y
, and ω
z
are com-
monly termed as pitch, yaw, and roll angles.
In our framework, HPE is formulated as a
Perspective-n-Point problem, using features com-
puted in each frame. Therefore, the calibration of the
camera is required in advance.
3.4 Initial Pose Estimation
Model-based and appearance-based HPE approaches
in which the face must be detected require the user
to be facing the camera during the initialization stage.
However, in any real scenario this constraint results in
a strong limitation, especially for assistive technolo-
gies that need to compute the head pose on the fly.
We instead propose a novel scheme to provide an
approximate initialization of the head pose as soon
as the head is detected and the facial landmarks are
visible. The scheme utilizes the 2D facial landmarks
retrieved in the first frame along with a prior set of
the corresponding 3D facial landmarks on a geometric
model when the face is frontal (red box in Figure 1).
This set is initially normalized and later re-scaled ac-
cording to the detected face in the 3D space.
Similarly to our approach for pose estimation, we
estimate the head pose from the 3D-2D correspon-
dences, by formulating the system as a Perspective-n-
Point problem and minimizing the reprojection error
in the image plane.
3.5 ROI Update
As depicted in Figure 1, one of the cornerstone of our
HPE framework is the use of salient features, which
extend the working range of our approach to extreme
head poses. These features are extracted only in a
region of interest (ROI) in the input image, that corre-
sponds to the head of the user.
The ROI is calculated from the projection of the
3D geometric model onto the 2D image plane, as
shown in Figure 6, and it is updated in each frame
as soon as a new head pose is recovered (orange box
in Figure 1). To do so, we first find the plane paral-
lel both to the axis of the ellipsoid and to the X-axis
of the image plane, and which cuts the EHM in two
equal parts. Secondly, we extract the surface that re-
sults from the intersection of the computed plane and
the ellipsoid. Finally, we project the surface onto the
image plane, assuming a perspective camera model.
For the EHM, the projection corresponds to an ellip-
tical ROI that covers the area of the face.
Figure 6: Projection of EHM on the image plane.
3.6 Feature Detection and Tracking
The backbone of our HPE approach is given by the
detection of facial landmarks and the tracking of
salient features on the ROI of the face. Therefore,
we divide the 2D feature estimation step in two main
tasks, detailed below.
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
128

In the case of facial landmarks, we proceed sim-
ilarly to the initialization stage, where each facial
landmark p
FL
is aligned on the detected face us-
ing (Kazemi and Sullivan, 2014), as described in 3.1.
With this method, we can find the 2D facial landmarks
correspondences in each pair of frames, as long as the
face is detected.
We compensate the limitation of facial-
landmarks-based approaches, by integrating a
set of salient features which can track the pose of
the head, even when the facial landmarks are not
available. The extraction of these features are detailed
in 3.2. In order to track the salient features and find
the correspondences, the iterative Lucas-Kanade
feature tracker with pyramids (Bouguet, 2001) is
used.
3.7 Sparse 3D Reconstruction
In the following, we describe the process to compute
the 3D feature points P
i
from each set of 2D features:
facial landmarks p
FL
and salient feature points p
SF
, by
means of ray tracing. To do so, we compute the in-
tersection point on the ellipsoidal model from the ray
that start at the optical center of the camera C and
pass through each 2D feature p in the image plane.
This line is given by P = C + kV, where V is a vector
parallel to the ray. k is the scalar parameter obtained
from the quadratic equation of the ellipsoid, given by:
|
W
|
2
k
2
+ 2(W • X) k +
|
X
|
2
− 1 = 0 (5)
with W = MR
T
V and X = MR
T
(C − E
0
). M is
the diagonal matrix of the inverses of the ellipsoid
radii {
1
r
x
,
1
r
y
,
1
r
z
}, R is the rotation matrix and E
0
is
the center of the ellipsoid.
As a result, we obtain two set of 3D features, one
of 3D facial landmarks P
FL
and the other of 3D salient
features P
SF
.
3.8 HPE and Measurement Fusion
Similarly to the initial HPE process described in 3.4,
we estimate the pose after formulating a Perspective-
n-Point problem from the 3D-2D correspondences
and solve by minimizing the reprojection error on the
image plane, using the global Levenberg-Marquardt
algorithm. To define the 3D-2D correspondences, we
use the set of 3D features P
i
that were calculated from
the previous frame and the 2D features obtained at the
current frame. This procedure is applied using both
set of features, salient features {P
SF
,p
SF
} and facial
landmarks {P
FL
,p
FL
}. Consequently, we obtain two
measured head poses: ω
SF
and t
SF
from the salient
features and ω
FL
and t
FL
from the facial landmarks.
We introduce a method for combining both mea-
surements using a dedicated Linear Kalman Filter.
Although Kalman Filter is a very common approach
in sensor fusion, it is the first time, to the best of our
knowledge, that it is used for fusing measurements
given by facial landmarks and by salient features. As
long as we have two different head pose measure-
ments from the two sets of feature points, it is pos-
sible to apply this framework. In general, Kalman
Filter is defined on the state-space representation of
the system, where the dynamical system is given by
the following state equation:
x
k
= Ax
k−1
+ Bu
k−1
+ w
k−1
. (6)
x
k
represents the state of the system at time k, u
k−1
the deterministic inputs to the system at time k −1 and
w
k−1
is the random noise affecting the system at time
k − 1, commonly termed as process noise.
The measurement equation is defined as:
z
k
= Hx
k
+ v
k
, (7)
where v
k
corresponds to the measurement noise, i.e.,
the random noise in the observation z
k
.
w
k
and v
k
are assumed to be independent, white
and having Gaussian zero mean, with covariance ma-
trices given by Eq. 8 and 9.
E[w
n
w
k
T
] =
(
Q
k
, for n = k
0, otherwise
(8)
E[v
n
v
k
T
] =
(
R
k
, for n = k
0, otherwise
(9)
In our framework, the state vector x contains the
position t and orientation ω of the head, with their re-
spective first and second derivatives, i.e., the velocity
and acceleration. The measurement (or observation)
vector z
k
is composed of both estimated poses. The
observation model is given by:
H =
H
T
SF
,H
T
FL
T
(10)
being H
SF
and H
FL
the respective observation models
from the salient features and the facial landmarks.
The covariance matrix of the observation noise is
then defined by:
R =
∑
SF
0
0
∑
FL
(11)
It is important to note that facial landmarks are
not always detected in every frame. In order to ad-
dress this problem, we propose to include a dynamic
Kalman Filter framework that corrects the state vector
from the available measurements. In case the face is
Combined Framework for Real-time Head Pose Estimation using Facial Landmark Detection and Salient Feature Tracking
129
Table 1: Results. Comparison of the RMSE, STD and MAE errors with other methods of the SoA using the BU dataset.
Method
RMSE ± STD MAE Time
Roll Pitch Yaw Roll Pitch Yaw (FPS)
(Sung et al., 2008) 3.1 5.6 5.4 - - - -
(Morency et al., 2008) - - - 2.91 3.67 4.97 6
(An and Chung, 2008) - - - -
Ellipsoid - - - 2.83 3.95 3.94 -
Cylinder - - - 3.22 7.22 5.33 -
Plane - - - 2.99 7.32 18.08 -
(Choi and Kim, 2008) - - -
Ellipsoid - - - 2.82 3.92 4.04 14
Cylinder - - - 2.45 4.43 5.19 14
(Jang and Kanade, 2008) - - - 2.1 3.7 4.6 -
(Kumano et al., 2009) - - - 2.9 4.2 7.1 -
(Jang and Kanade, 2010) - - - 2.07 3.44 4.22 -
(Prasad and Aravind, 2010) - - - 3.6 2.5 3.8 -
(Asteriadis et al., 2010) 3.56 4.89 5.72 - - - -
(Saragih et al., 2011) - - - 2.55 4.46 5.23 8
(Valenti et al., 2012)
Fixed template with eye cues 3.00± 2.82 5.26± 4.67 6.10± 5.79 - - - -
Fixed template w/o eye cues 3.85±3.43 6.00±5.21 8.07±7.37 - - - -
Updated template with eye cues 3.93±3.57 5.57±4.56 6.45±5.72 - - - -
Updated template w/o eye cues 4.15±3.72 5.97±4.87 6.40±5.49 - - - -
(Wang et al., 2012) - - - 1.86 2.69 3.75 15
(Baltru
ˇ
saitis et al., 2012) - - - 2.08 3.81 3.00 -
(Vicente et al., 2015) - - - 3.2 6.2 4.3 25
(Diaz Barros et al., 2017)
Ellipsoid 3.36±2.98 4.46±3.84 5.09±4.56 2.56 3.39 3.99 56
Cylinder 3.66±3.35 5.73±4.54 6.16±5.42 2.80 4.58 4.87 42
(Jeni et al., 2017) - - - 2.41 2.66 3.93 50
Our approach
Integration SF+FL 3.44±3.11 4.51±3.97 5.84±4.98 2.62 3.59 4.73
Integration with KF 3.37±3.00 4.31±3.60 5.30±4.70 2.56 3.29 4.13
Fusion with dynamic KF 3.36±2.99 4.32±3.62 5.25±4.70 2.54 3.27 4.07 23
not detected, the Kalman Filter is updated using only
the pose estimated from the salient features, that is:
H = H
SF
(12)
and the observation noise covariance as:
R =
∑
SF
. (13)
Otherwise, the fusion scheme defined by Eq. 10
and 11 is employed. From this framework, we are
able to update the filter and estimate the new pose
having either one or two measurements.
4 EVALUATION AND RESULTS
In this section, we describe the methodology imple-
mented to evaluate our HPE approach and the analy-
sis of the results in comparison to other methods of
the state of the art.
4.1 Evaluation and Experiments
We evaluated our framework using the Boston Uni-
versity dataset with uniform illumination proposed
by (La Cascia et al., 2000). This dataset comprises
a set of 45 videos recorded with a RGB camera,
from 5 different persons on an office setup. The
ground truth was acquired using a Flock of Birds
magnetic sensor, with nominal accuracy of 1.8 mm
in translation and 0.5 degrees in rotation. With this
dataset, we also investigated the effect of combining
facial landmarks with salient features using two other
pipelines than the fusion-based framework described
in Subsection 3.8. These two pipelines are described
below.
Integrating Feature Points in Common
Pipeline: For this first method, we integrated the
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
130

set of 2D salient features p
SF
along with the set of
2D facial landmarks p
FL
, to create one combined
set of 2D features points p
SF+FL
. The set of 3D
feature points P
SF+FL
, composed as well of 3D salient
features P
SF
and 3D facial landmarks P
FL
, were com-
puted as described in Subsection 3.7, by using ray
tracing. The head pose was also retrieved by finding
the 3D-2D correspondences and minimizing the
reprojection error from the combined set of features,
{P
SF+FL
,p
SF+FL
}. Similarly to the fusion approach,
the face ROI was updated as detailed in 3.5. This
method is listed in the results as Integration SF+FL.
Integrating Feature Points and Adding
Kalman Filter: For the second pipeline (Integration
with KF), we proceeded similarly to the previous
method, Integration SF+FL, but we included an extra
step to incorporate a Kalman Filter to update the state
vector using the pose obtained by minimizing the
reprojection error in the image plane.
4.2 Results
Three different metrics, the root mean square errors
(RMSE), standard deviation (STD) and mean abso-
lute error (MAE), were used to compare our results
with alternatives methods of the state of the art. Not
only we compare the approach proposed in Section 3,
but also the two other pipelines described in Subsec-
tion 4.1. The results are reported in Table 1.
As can be noted from Table 1, our current results
are comparable to the state of the art approaches. Al-
though the low MAE from (Baltru
ˇ
saitis et al., 2012),
this method is not suitable for real-time applications.
The same applies to methods proposed in (Jang and
Kanade, 2010; Prasad and Aravind, 2010). (Jeni
et al., 2017) on the other hand, can perform on
real time, but a large dataset of high-resolution 3D
face scans are required for training (the method used
around 300,000).
4.3 Runtime Analysis
For many applications, it is of great importance the
approach performs in real time. We measured the
average time to execute each step of the proposed
pipeline using a CPU with an Intel Core(TM) i5-
4210U processor. The results are presented in Table 2.
From Table 2 we can observe the average runtime
of the proposed framework. At the first frame, it re-
quires around 50 ms to detect the face and provide an
initial estimation of the head pose using only facial
landmarks. For the rest of the frames, the pipeline is
also suitable for real time applications, as it can run
Table 2: Averaged runtime for 100 launches.
Process Time in ms
Face detection & Init. EHM 31.61
Initial HPE 17.87
Runtime for first frame 49.48
ROI Update 0.49
Feature detection and tracking 23.84
3D Reconstruction 0.27
Head pose estimation 18.6
Runtime of other frames 43.2
at 23fps. This is an important advantage with respect
to methods of the state of the art that do not perform
in real time, as (Ahn et al., 2014; Prasad and Aravind,
2010; Wang et al., 2012) (see last column of Table 1).
5 CONCLUSIONS
We introduced a new framework to estimate the 6
DoF head pose from 2D images, by combining the
head poses estimated from facial landmarks detected
in each frame and tracked salient features, through a
dedicated Kalman Filter. It performs in real time, with
no need for parallel computing.
We extend the application of feature-based HPE
methods that rely on facial landmarks detected in ev-
ery frame, to cases where the face is not detected,
but the head is still visible. In this way, our ap-
proach can handle extreme pose variations and (self-)
occlusion. On the other hand, we avoid the drifting
which might results from cumulative error on salient-
feature-based methods, by considering the head pose
estimated from facial landmarks.
We also propose a method for initializing the head
pose when it is different to frontal. To do so, we
use the facial landmarks detected in the first frame
and their corresponding 3D points on a synthetic head
model that is facing the camera. We then compute the
initial pose by minimizing the reprojection error from
the 3D-2D correspondences.
An ellipsoidal model provides a good representa-
tion of the human head. However, it might add ap-
proximation errors when estimating the pose. For that
reason, we are interested in exploring in the future
the performance of the pipeline with a refined head
model, that adjusts better to the shape of the head.
We have also discussed about improving the
framework by replacing the linear Kalman Filter by
an Extended Kalman Filter (EKF), as it provides a
more accurate modelling of the 3D motion of the
head, and thus a better estimation of the rotation an-
gles.
Combined Framework for Real-time Head Pose Estimation using Facial Landmark Detection and Salient Feature Tracking
131

REFERENCES
Ahn, B., Park, J., and Kweon, I. S. (2014). Real-time head
orientation from a monocular camera using deep neu-
ral network. In Asian Conference on Computer Vision
(ACCV), pages 82–96. Springer.
An, K. H. and Chung, M. J. (2008). 3d head tracking and
pose-robust 2d texture map-based face recognition us-
ing a simple ellipsoid model. In IEEE/RSJ Interna-
tional Conference on Intelligent Robots and Systems
(IROS), pages 307–312. IEEE.
Asteriadis, S., Karpouzis, K., and Kollias, S. (2010). Head
pose estimation with one camera, in uncalibrated en-
vironments. In Workshop on Eye Gaze in Intelligent
Human Machine Interaction, pages 55–62. ACM.
Baker, S., , Matthews, I., Xiao, J., Gross, R., Kanade, T.,
and Ishikawa, T. (2004). Real-time non-rigid driver
head tracking for driver mental state estimation. In
11th World Congress on Intelligent Transportation
Systems.
Baltru
ˇ
saitis, T., Robinson, P., and Morency, L.-P. (2012). 3d
constrained local model for rigid and non-rigid facial
tracking. In International Conference on Computer
Vision and Pattern Recognition (CVPR). IEEE.
Borghi, G., Venturelli, M., Vezzani, R., and Cucchiara, R.
(2017). Poseidon: Face-from-depth for driver pose
estimation. In International Conference on Computer
Vision and Pattern Recognition (CVPR). IEEE.
Bouguet, J. Y. (2001). Pyramidal implementation of the
affine lucas kanade feature tracker description of the
algorithm. Intel Corporation, 5:1–10.
Cheng, S. Y., Park, S., and Trivedi, M. M. (2007). Multi-
spectral and multi-perspective video arrays for driver
body tracking and activity analysis. Computer Vision
and Image Understanding, 106(2):245–257.
Choi, S. and Kim, D. (2008). Robust head tracking using
3d ellipsoidal head model in particle filter. Pattern
Recognition, 41(9):2901–2915.
Diaz Barros, J. M., Garcia, F., Mirbach, B., and Stricker, D.
(2017). Real-time monocular 6-dof head pose estima-
tion from salient 2d points. In International Confer-
ence on Image Processing (ICIP). IEEE.
Dodgson, N. A. (2004). Variation and extrema of human
interpupillary distance. In Stereoscopic Displays and
Virtual Reality Systems XI, volume 5291, pages 36–
46. SPIE.
Drouard, V., Ba, S., Evangelidis, G., Deleforge, A., and
Horaud, R. (2015). Head pose estimation via proba-
bilistic high-dimensional regression. In International
Conference on Image Processing (ICIP), pages 4624–
4628. IEEE.
Fanelli, G., Dantone, M., Gall, J., Fossati, A., and Van Gool,
L. (2013). Random forests for real time 3d face
analysis. International Journal of Computer Vision,
101(3):437–458.
Fanelli, G., Gall, J., and Van Gool, L. (2011). Real time
head pose estimation with random regression forests.
In International Conference on Computer Vision and
Pattern Recognition (CVPR), pages 617–624. IEEE.
Ghiass, R. S., Arandjelovi
´
c, O., and Laurendeau, D. (2015).
Highly accurate and fully automatic head pose estima-
tion from a low quality consumer-level rgb-d sensor.
In 2nd Workshop on Computational Models of Social
Interactions: Human-Computer-Media Communica-
tion, pages 25–34. ACM.
Gordon, C. C., Bradtmiller, B., Clauser, C. E., Churchill,
T., McConville, J. T., Tebbetts, I., and Walker, R. A.
(1989). Anthropometric survey of u.s. army person-
nel: Methods and summary statistics. In Technical re-
port 89-044. Natick MA: U.S. Army Natick Research,
Development and Engineering Center.
Guo, Z., Liu, H., Wang, Q., and Yang, J. (2006). A fast
algorithm face detection and head pose estimation for
driver assistant system. In 8th International Confer-
ence on Signal Processing, volume 3. IEEE.
Jang, J. S. and Kanade, T. (2008). Robust 3d head track-
ing by online feature registration. In 8th International
Conference on Automatic Face & Gesture Recognition
(FG’08). IEEE.
Jang, J. S. and Kanade, T. (2010). Robust 3d head track-
ing by view-based feature point registration. Techni-
cal report, People Image Analysis (PIA) Consortium,
Carnegie Mellon University.
Jeni, L. A., Cohn, J. F., and Kanade, T. (2017). Dense 3d
face alignment from 2d video for real-time use. Image
and Vision Computing, 58:13–24.
Kazemi, V. and Sullivan, J. (2014). One millisecond face
alignment with an ensemble of regression trees. In In-
ternational Conference on Computer Vision and Pat-
tern Recognition (CVPR), pages 1867–1874. IEEE.
Kumano, S., Otsuka, K., Yamato, J., Maeda, E., and Sato,
Y. (2009). Pose-invariant facial expression recogni-
tion using variable-intensity templates. International
Journal of Computer Vision, 83(2):178–194.
Kun, J., Bok-Suk, S., and Reinhard, K. (2013). Novel back-
projection method for monocular head pose estima-
tion. International Journal of Fuzzy Logic and Intelli-
gent Systems, 13(1):50–58.
La Cascia, M., Sclaroff, S., and Athitsos, V. (2000). Fast,
reliable head tracking under varying illumination: An
approach based on registration of texture-mapped 3d
models. Transactions on Pattern Analysis and Ma-
chine Intelligence, 22(4):322–336.
Liu, X., Liang, W., Wang, Y., Li, S., and Pei, M. (2016). 3d
head pose estimation with convolutional neural net-
work trained on synthetic images. In International
Conference on Image Processing (ICIP), pages 1289–
1293. IEEE.
Meyer, G. P., Gupta, S., Frosio, I., Reddy, D., and Kautz,
J. (2015). Robust model-based 3d head pose estima-
tion. In International Conference on Computer Vision
(ICCV), pages 3649–3657. IEEE.
Morency, L., Whitehill, J., and Movellan, J. (2008). Gen-
eralized adaptive view-based appearance model: In-
tegrated framework for monocular head pose esti-
mation. In 8th International Conference on Auto-
matic Face & Gesture Recognition (FG’08), pages 1–
8. IEEE.
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
132

Murphy-Chutorian, E. and Trivedi, M. M. (2009). Head
pose estimation in computer vision: A survey. Trans-
actions on Pattern Analysis and Machine Intelligence,
31(4):607–626.
Murphy-Chutorian, E. and Trivedi, M. M. (2010). Head
pose estimation and augmented reality tracking: An
integrated system and evaluation for monitoring driver
awareness. Transactions on Intelligent Transportation
Systems, 11(2):300–311.
Papazov, C., Marks, T. K., and Jones, M. (2015). Real-time
3d head pose and facial landmark estimation from
depth images using triangular surface patch features.
In International Conference on Computer Vision and
Pattern Recognition (CVPR). IEEE.
Prasad, B. H. and Aravind, R. (2010). A robust head pose
estimation system for uncalibrated monocular videos.
In 7th Indian Conference on Computer Vision, Graph-
ics and Image Processing, pages 162–169. ACM.
Rosten, E., Porter, R., and Drummond, T. (2010). Faster and
better: A machine learning approach to corner detec-
tion. Transactions on Pattern Analysis and Machine
Intelligence, 32:105–119.
Saeed, A. and Al-Hamadi, A. (2015). Boosted human head
pose estimation using kinect camera. In International
Conference on Image Processing (ICIP), pages 1752–
1756. IEEE.
Saragih, J. M., Lucey, S., and Cohn, J. F. (2011). De-
formable model fitting by regularized landmark mean-
shift. International Journal of Computer Vision,
91(2):200–215.
Schwarz, A., Haurilet, M., Martinez, M., and Stiefelhagen,
R. (2017). Driveahead - a large-scale driver head pose
dataset. In International Conference on Computer Vi-
sion and Pattern Recognition Workshops (CVPRW).
IEEE.
Sung, J., Kanade, T., and Kim, D. (2008). Pose robust face
tracking by combining active appearance models and
cylinder head models. International Journal of Com-
puter Vision, 80(2):260–274.
Valenti, R., Sebe, N., and Gevers, T. (2012). Com-
bining head pose and eye location information for
gaze estimation. Transactions on Image Processing,
21(2):802–815.
Valenti, R., Yucel, Z., and Gevers, T. (2009). Robustifying
eye center localization by head pose cues. In Inter-
national Conference on Computer Vision and Pattern
Recognition (CVPR), pages 612–618. IEEE.
Vicente, F., Huang, Z., Xiong, X., De la Torre, F., Zhang,
W., and Levi, D. (2015). Driver gaze tracking and
eyes off the road detection system. Transactions on
Intelligent Transportation Systems, 16(4):2014–2027.
Viola, P. and Jones, M. (2001). Rapid object detection using
a boosted cascade of simple features. In International
Conference on Computer Vision and Pattern Recogni-
tion (CVPR), volume 1, pages I–511. IEEE.
Wang, H., Davoine, F., Lepetit, V., Chaillou, C., and Pan,
C. (2012). 3-d head tracking via invariant keypoint
learning. Transactions on Circuits and Systems for
Video Technology, 22(8):1113–1126.
Yin, C. and Yang, X. (2016). Real-time head pose estima-
tion for driver assistance system using low-cost on-
board computer. In 15th ACM SIGGRAPH Confer-
ence on Virtual-Reality Continuum and Its Applica-
tions in Industry, volume 1, pages 43–46. ACM.
Zhu, Y. and Fujimura, K. (2004). Head pose estimation for
driver monitoring. In Intelligent Vehicles Symposium,
pages 501–506. IEEE.
Combined Framework for Real-time Head Pose Estimation using Facial Landmark Detection and Salient Feature Tracking
133
