
Towards Large-scale Image Retrieval with a Disk-only Index
Daniel Manger
1
, Dieter Willersinn
1
and J
¨
urgen Beyerer
1,2
1
Fraunhofer IOSB, Karlsruhe, Germany
2
Karlsruhe Institute of Technology KIT, Vision and Fusion Lab, Karlsruhe, Germany
Keywords:
Content-based Image Retrieval, Bag-of-words, Convolutional Neural Networks, Index.
Abstract:
Facing ever-growing image databases, the focus of research in content-based image retrieval, where a query
image is used to search for those images in a large database that show the same object or scene, has shifted
in the last decade. Instead of using local features such as SIFT together with quantization and inverted file in-
dexing schemes, models working with global features and exhaustive search have been proposed to encounter
limited main memory and increasing query times. This, however, impairs the capability to find small objects in
images with cluttered background. In this paper, we argue, that it is worth reconsidering image retrieval with
local features because since then, two crucial ingredients became available: large solid-state disks providing
dramatically shorter access times, and more discriminative models enhancing the local features, for example,
by encoding their spatial neighborhood using features from convolutional neural networks resulting in way
fewer random read memory accesses. We show that properly combining both insights renders it possible to
keep the index of the database images on the disk rather than in the main memory which allows even larger
databases on today’s hardware. As proof of concept we support our arguments with experiments on established
public datasets for large-scale image retrieval.
1 INTRODUCTION
While being a lively field of research in computer vi-
sion, content-based image retrieval (CBIR) has also
become apparent in many applications, including,
for example, countless apps for recognizing specific
items based on photos taken with mobile devices.
However, today’s typical CBIR setups are restricted
to a limited amount of database images to be searched
in - typically not exceeding a few million images.
In other words, even 15 years after the introduction
of local features such as SIFT (Lowe, 2004), which
boosted computer vision in many aspects, it has not
yet been achieved to scale that original accuracy of
comparing a pair of images with local features to-
wards current huge web-scale databases containing
billions of images. The main reason for that seems,
that the models typically are based on a codebook-
based quantization of feature descriptors into visual
words (Sivic and Zisserman, 2003). This represen-
tation of local features, commonly termed Bag-of-
Words (BoW), allows to manage the image retrieval
problem with established methods from text retrieval,
i.e. to leverage an inverted file indexing scheme with
the resulting index being stored in main memory for
speedup reasons. As the quantization step impairs
the discriminative power of the local features, the re-
trieval accuracy in large-scale datasets is limited. As
a consequence, research turned towards global fea-
tures where all local features of an image are ag-
gregated into a high-dimensional embedding such as
VLAD (J
´
egou et al., 2010) or Fisher Vectors (Per-
ronnin and Dance, 2007) followed by a compression
step - usually PCA and whitening - resulting in a
compact fixed-length code per image. Eventually, af-
ter the sustained success of convolutional neural net-
works (CNN), deep-learned features have been pro-
posed which, for example, compile global features
from pooling the responses of CNN layers (Babenko
and Lempitsky, 2015; Kalantidis et al., 2015; Raza-
vian et al., 2014; Tolias et al., 2015).
Since those global image representations are targeted
to yield very compact codes suitable for fast exhaus-
tive search, retrieving small objects surrounded by
plenty of cluttered background becomes difficult. In
this work, we argue that two recent technical and al-
gorithmic advances offer themselves to be combined
with the bag-of-words model for image retrieval:
First, the latest hardware progress in solid-state disks
enables extremely fast random read access to large
on-disk datasets. Second, extending the discrim-
inability of local features by considering their larger
Manger, D., Willersinn, D. and Beyerer, J.
Towards Large-scale Image Retrieval with a Disk-only Index.
DOI: 10.5220/0006631303670372
In Proceedings of the 13th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2018) - Volume 5: VISAPP, pages
367-372
ISBN: 978-989-758-290-5
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
367

neighborhood utilizing representations from CNNs,
can be used to induce a second dimension into the
index which results in far fewer memory accesses for
processing one query image. Leveraging both circum-
stances allows to implement a retrieval system whose
index no longer needs to reside in the main memory
but can remain on the larger and less expensive solid-
state drive.
This paper is structured as follows: Section 2
presents related work on extensions of the BoW
model, Section 3 outlines the relevant technical de-
tails for using solid-state disks for storing the index.
Section 4 then describes the experiments starting with
insights of the 2D index with CNN features and Sec-
tion 5 focuses on the evaluation of the proposed re-
trieval system and its results in terms of accuracy,
speed and memory usage.
2 RELATED WORK
Many advancements of the bag-of-words model have
been proposed which aim at different aspects of the
image retrieval pipeline in order to incorporate more
information into the retrieval process. In this work,
we neglect methods refining the shortlist (re-ranking)
and focus on those approaches that incorporate addi-
tional information into the index so that all images
can benefit from. These can be separated into three
strategies:
Extending the accumulator which holds bins for
the scores of all the database images by new dimen-
sions assuming that irrelevant features will spread
along multiple bins of one database image while cor-
responding features will accumulate in one or few of
the bins of a similar image. For instance, (Jegou et al.,
2008) use orientation and scale information of SIFT
features to push database images with features having
consistent differences in scale and orientation com-
pared to the query image.
Filtering of features: This keeps the accumula-
tor compact (still one bin per database image) and
adds additional information into the index to filter
matches prior to casting votes into the accumulator.
(Zhang et al., 2013) integrates information about the
four closest features in the image coordinate space
and during retrieval, each BoW match is further ex-
amined as to how many of the four neighboring fea-
tures are consistent.
2D-Index: In order to overcome the runtime, per-
formance and storage limits of both accumulator ex-
tension and filtering of features, (Zheng et al., 2014)
uses a multi-index. The first dimension of the index
is still dedicated to the BoW vectors while the sec-
ond dimension is based on the color name descriptor
(Khan et al., 2012), which is an 11-dimensional de-
scriptor mapping color values to 11 categories. Using
a Color-Codebook of size 200, every feature in the
index is assigned up to the 100 closest Color-Words
which however obviously eliminates the advantages
of the second dimension because still up to 50% of
the index has to be traversed. Recently, (Manger
and Willersinn, 2017) proposed to use features pooled
from convolutional neural networks to represent the
features’ larger neighborhoods inducing the second
dimension. More precisely, they sum- or max-pool
the activations in the 512 channels of the last convo-
lutional layer of the VGG16 network (Simonyan and
Zisserman, 2014). The pooling is performed in a rect-
angular region defined by the local feature’s position
and scale to preserve the invariance w.r.t. translation,
scale and rotation of the underlying local features.
In this paper, we focus on the latter strategy and
adopt the approach of (Manger and Willersinn, 2017)
since when targeting the index to reside on a solid-
state disk, adding such a new dimension to the index
is attractive in multiple aspects: In contrast to the fil-
tering strategy, the runtime during retrieval can be op-
timized because only features which match both di-
mensions have to be considered for the accumulator
leading to fewer memory accesses. Furthermore, re-
trieval accuracy can benefit from the second dimen-
sion because many incorrect matches of features are
discarded that match w.r.t. the first dimension only
(the quantized local feature descriptor) but not in the
second dimension (the larger context of the feature
described by the CNN feature). We also consider the
combination of max- and sum-pooled CNN features
using OR and AND combinations, e.g. for the latter,
both the max-pooled and the sum-pooled values must
match after quantization (and of course the respective
visual words) in order to cast votes in the accumula-
tor.
3 SOLID-STATE DISKS FOR
RETRIEVAL
Solid-state drives (SSD) are storage devices based on
flash-memory and without any moving parts like there
are in hard drives. Bits are stored in cells which are
grouped into blocks consisting of a number of pages
which is the smallest unit for reading or writing.
In order to provide the same host interface as hard-
drives and since flash-cells are wearing off, SSDs re-
quire a controller with a flash translation layer which
maps the logical block adresses to the physical blocks
of the flash memory space and which manages the
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
368

wearing off. See (Goossaert, 2014) for more details
in SSDs in view of coding.
In this paper, we focus on the characteristics with
respect to random read access since this is the rele-
vant property when using SSDs for retrieval
1
. In our
scenario, the most important property of a SSD for
retrieval is the number of input/output operations per
second (IOPS). However, the performance values in
the data sheets are usually presented for random reads
of larger chunks, e.g. 4,096 bytes. For smaller sizes
such as 16 bytes, the read-ahead buffering technique
is not effective and the controller has to perform much
more address mappings resulting in lower IOPS. Fur-
thermore, random reads can be performed in parallel
(referred to as query depth in the data sheets) in order
to take advantage of the internal parallelism based on
spreading data across several flash chips. Finally, the
data to be read should be aligned to the size of a page
since otherwise, even reading two bytes could require
reading two full pages instead of one. Figure 1 shows
the IOPS for 10,000 random read operations in a 200
GiB file using different query depths and chunk sizes.
For each curve, we average the IOPS from ten runs
and clear the cache of the operating system each time
to prevent distortion from caching effects. See Sec-
tion 4.2 for details on the hardware. As can be seen,
performance saturates at 20 parallel random read op-
erations and the page size turns out to be 512 bytes
since reading even one more byte (513 bytes) takes
almost twice as long. For our experiments, we there-
fore use a query depth of 20 in the following.
4 EXPERIMENTS
We first describe the setup used for our experiments,
followed by statistics on the features to be included
into the 2D index and the design decisions taken to
derive the final retrieval system.
4.1 Setup and Datasets
For the 2D index, we follow the setup of (Manger and
Willersinn, 2017) using a visual Codebook of size
100,000 generated with SIFT features (Lowe, 2004)
and RootSift normalization (Arandjelovi
´
c and Zisser-
man, 2012). For the second dimension characteriz-
ing the larger neighborhood of the features, we adopt
1
However, since SSDs provide internal parallelism, in-
cluding by spreading data across several NAND-flash chips,
the read performance also correlates with the write pattern,
e.g. related data should be written together. Since, in our re-
trieval scenario, we don’t know in advance which data will
be related, we leave this as a footnote in this work.
0
20
40
60
80
100
120
140
160
180
1
2
4
8
16
32
64
128
256
512
1k
2k
4k
8k
1
2
4
8
40
30
18
16
20
Input operations per second (
10
3
)
Size of random read request in bytes
Figure 1: Performance of the tested SSD for 10,000 random
reads using different query depths (1 to 40) and for varying
sizes of read requests (1 to 8,196 bytes).
the Codebook size of 10,000 for the max- and sum-
pooled CNN features. All models (Codebooks) are
generated using the Oxford5k dataset (Philbin et al.,
2007) which contains 5,062 images. For evaluation,
we use the Paris6k dataset (Philbin et al., 2008) with
6,392 images including five query images and several
corresponding images for each of 11 distinct build-
ings. Furthermore, we add one million images from
the MIRFlickr1M dataset (Mark J. Huiskes and Lew,
2010) as distractors. In this setup containing over 1M
images yielding over 1 billion quantized local features
in the index, the benefit of distributing them along two
dimensions becomes obvious in Table (top) 1. Com-
pared to a plain BoW index, the second dimension
cuts down the number of required features to be pro-
cessed by a factor of at least 1,500.
4.2 Hardware
All experiments in this paper are run using implemen-
tations in C++ on a system with two Intel Xeon E5-
2630v4 10-Core CPUs using all cores. For the sepa-
rate SSD which only stores the index, we use a Sam-
sung SSD 960 Pro M.2 1TB with NVMe protocol and
PCIe 3.0 x4.
4.3 Discriminative 2D Index
In traditional Bag-of-Words-based image retrieval,
the index containing all quantized (using the Code-
book) features of the database images is read from
disk to main memory during the start of the software.
The index is composed of a set of lists, where one
list of variable length for each visual word of the
Towards Large-scale Image Retrieval with a Disk-only Index
369

Table 1: Number of quantized features in the index (containing Paris6k and 1M distractor images) which are accessed for
processing one query image for different index configurations. In total, the index in main memory contains 1.27 × 10
9
features. The numbers represent the median for the 55 query images of Paris6k since some of them contain very much
features due to heavily cluttered backgrounds.
Index configuration number of features processed
Index in main memory
BoW only 44,720,650
BoW + CNN-max 15,296
BoW + CNN-sum 17,238
BoW + CNN-sum AND CNN-max 2,945
BoW + CNN-sum OR CNN-max 29,321
Index on SSD using a maximum number of features per cell of: 16 8 4 2 1
BoW + CNN-max 9,119 7,187 5,310 3,657 2,299
BoW + CNN-sum AND CNN-max 1,665 1,263 866 560 336
Codebook contains all features assigned to that visual
word. However, when adding the second dimension
to the index based on the CNN features and aiming at
keeping the new 2D-index on the solid-state disk only,
the resulting 2D structure forces a fixed maximum
number of features per 2D cell in order to quickly lo-
cate each of the 10
5
× 10
4
= 10
9
cell on the disk. Un-
fortunately, the features do not spread evenly across
both dimensions
2
, which raises the question about the
maximum number of features per cell. Too low values
will discard many features whereas too high values
will require too much memory and lower the ‘filling
level’ of the cells. We therefore analyze the retrieval
accuracy for different values.
For each of the CNN feature variants (max-pooled
and sum-pooled) we create a separate index file.
When using the OR combination of both variants, we
read the appropriate features using both files but re-
frain from filtering out the few overlapping features
which match in both variants (and thus voting twice in
the accumulator). Similarly, in case of the AND com-
bination, we also avoid to read both sets of features
and then search for duplicates. Instead, we use the
filtering approach (see. Section 2), i.e. in the index
designated to the max-pooled features, we store for
each feature not only its image index in the database
but also its sum-pooled value which is then used for
filtering. Please note that, in contrast to the filtering
strategies described in Section 2 such as Hamming
Embedding, this virtually requires no overhead since
the number of features is tiny compared to BoW-only,
and the filtering step is just comparing one integer
value per feature.
2
which can be observed using the Gini coefficient which
is 0.2 for the distribution of features across the visual words,
and 0.6 for the CNN features, respectively for our database
setup.
In the index file, we use 12 bytes for each fea-
ture: 4 bytes for the image number in the database, 2
bytes for the quantized CNN feature of the respective
other pooling variant (for realizing the AND combina-
tion as mentioned in the last paragraph) and reserve 6
more bytes for additional payload (which is however
not used in this work, e.g. scale and orientation of a
feature or Hamming Embedding of its descriptor). In
each cell we allow up to 16 features which leads to a
final size of the SSD index file of 10
5
× 10
4
× 16 × 12
bytes = 178 GiB. Using these parameters, the cell size
is 16 × 12 = 192 bytes and thus below the SSD page
size of 512 bytes (see Section 3) which allows to read
all of the up to 16 features in the cell using one ran-
dom read operation.
5 EVALUATION
Figure 2 presents the results of the large-scale re-
trieval experiment on the Paris6k dataset together
with 1 million distractor images and using stan-
dard protocols including the mean average precision
(MAP) metric for evaluation. MAP results are shown
as a function of the maximum number of features per
cell (x-coordinate). For each value, we also deter-
mined how many features hence fit into the SDD in-
dex (see ’Features used’, aligned to the right axis). On
the other hand, despite for some cells, not all features
can be saved, nearly 60% of the cells remain empty
since no feature takes their visual word and CNN-
feature values. Using the OR combination of CNN
features and taking just three features per cell already
outperforms the BoW-model, although only 40% of
the features can be stored in the SSD index in this con-
figuration. Furthermore, the performance approaches
saturation when including at least ten features per cell
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
370
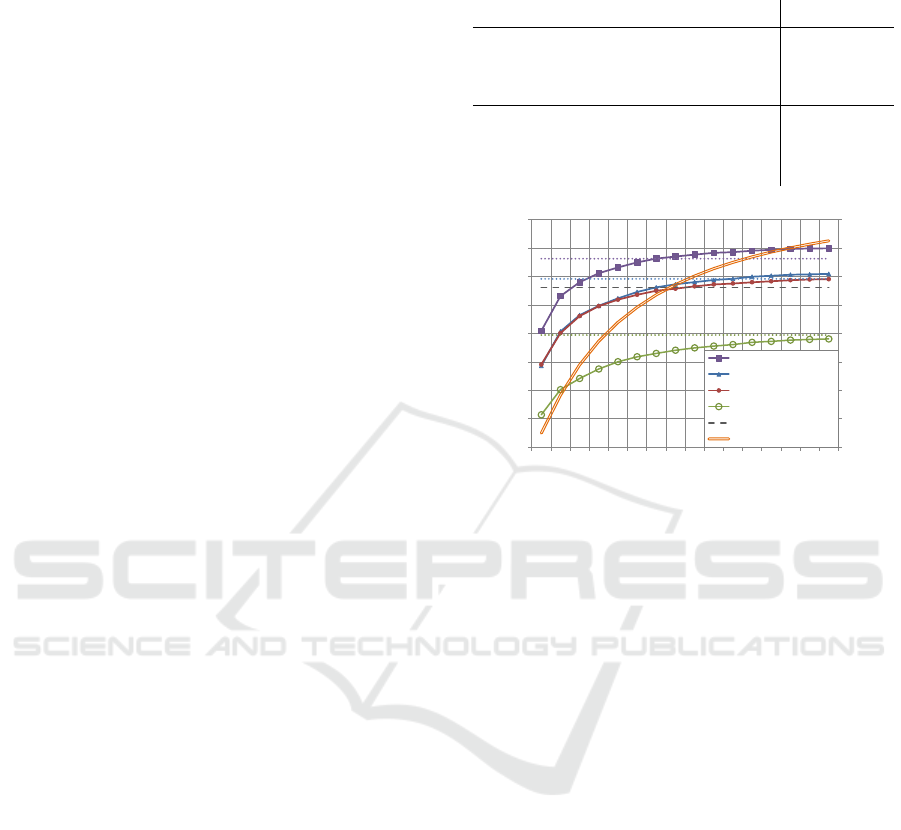
(70% of all features). Interestingly, using only 80%
of all features, the SSD index can even slightly out-
perform the original retrieval using all features in the
main memory. This suggests, that by restricting the
number of features in terms of their quantized CNN
feature, one can filter out features with a frequently
occurring larger neighborhood which negatively af-
fect the retrieval performance. Potentially, these are
the features arising on watermark symbols or times-
tamps in the images.
Table 1 (bottom) shows, how the different cell
sizes affect the number of features processed during
one query. As only several thousand features gener-
ate votes into the accumulator for over one million
database images, the accumulator could be realized
with a sparse implementation which speeds up both
initialization and the final sorting to obtain the simi-
larity scores.
Finally, Table 2 presents retrieval times for the dif-
ferent setups. We exclude durations for feature extrac-
tion of the query image and accumulator evaluation
thus focussing on the retrieval of the features in the
index. For the variants using SSD index, we present
numbers for a maximum cell size of 16 features since,
due to the page size of the SSD, access times for
smaller cell sizes are identical anyway (see Section 3).
Astonishingly, the models accessing the index on the
solid-state disk are one order of magnitude faster than
the BoW model working with the main memory and
all features. Of course, this is only possible because,
in our proposed setup, far less features have to be ac-
cessed which is in turn a consequence of the more
discriminative representation based on CNN features.
For a rough comparison, we also report the process-
ing time using our hardware (again using all cores) for
image retrieval with global features, i.e. exhaustively
comparing the query vector with all 1M database vec-
tors (in main memory) assuming a 256 dimensional
global feature vector for each image.
Please note that, ultimately, the configuration with
the AND-combination of CNN features could even be
one magnitude faster if the SSD was large enough
to allow indexing along all three dimensions (BoW
× CNN-max × CNN-sum; see Section 4.3 for our
workaround implementation). However, even when
only using one feature per cell and storing just the im-
age index inside, such a setup would need 10
5
× 10
4
×
10
4
× 4 bytes = 36 TiB. Nevertheless, quantizing the
CNN-features with smaller codebooks can offer flexi-
ble trade-offs between retrieval speed and SSD mem-
ory usage.
Table 2: Retrieval time for one query on Paris6k + 1M
dataset (mean of all 55 query images).
Index configuration time in ms
BoW only (index in main memory) 369.8
Global features with exhaustive
search: 10
6
vectors, 256D
28.1
BoW + max (SSD) 24.8
BoW + max AND sum (SSD) 36.6
BoW + max OR sum (SSD) 36.1
10%
20%
30%
40%
50%
60%
70%
80%
90%
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
Maximum number of features per cell
max OR sum
max
sum
max AND sum
Bag-of-Words
Features used
Mean average precision (MAP)
Percentage of all features used
Figure 2: Retrieval performance for the Paris6k dataset with
1 million distractor images. Results of using the proposed
SSD index (incorporating max- and sum-pooled CNN fea-
tures and their combinations) are shown in solid lines. For
comparism, dotted lines indicate the conventional BoW
setup + CNN features, i.e. the index being located in the
main memory, all features are used, and their CNN feature
extensions are used via filtering. The dashed line represents
the plain BoW setup working with visual words only, i.e.
without any CNN features.
6 CONCLUSION
In this work, we have outlined the benefits for lo-
cal feature-based image retrieval when leveraging the
combination of a discriminative CNN-based feature
extension together with the ultrashort random read ac-
cess times of modern solid-state disks. Beyond being
faster, the proposed method gets rid of the necessity
of keeping the index of all features in the main mem-
ory.
Underpinned by our experiments retrieving simi-
lar images in a database of over one million images
in less than 40 milliseconds, we showed that the pro-
posed combination can enable retrieval times which
are similar to the methods using ultra-compact signa-
tures derived from global image features. While en-
abling still larger databases on computers and servers,
this could, in principle and for some applications,
even pave the way for running large-scale image re-
Towards Large-scale Image Retrieval with a Disk-only Index
371

trieval on mobile devices where large flash drives
are becoming common but computational power and
main memory is still limited.
ACKNOWLEDGEMENTS
This work was supported by the German Ministry
of Education and Research (BMBF) (grant number
13N14028).
REFERENCES
Arandjelovi
´
c, R. and Zisserman, A. (2012). Three things
everyone should know to improve object retrieval. In
Computer Vision and Pattern Recognition (CVPR),
2012 IEEE Conference on, pages 2911–2918. IEEE.
Babenko, A. and Lempitsky, V. (2015). Aggregating local
deep features for image retrieval. In Proceedings of
the IEEE International Conference on Computer Vi-
sion, pages 1269–1277.
Goossaert, E. (2014). Coding for ssds.
http://codecapsule.com/2014/02/12/coding-for-
ssds-part-1-introduction-and-table-of-contents/.
Jegou, H., Douze, M., and Schmid, C. (2008). Hamming
embedding and weak geometric consistency for large
scale image search. In European conference on com-
puter vision, pages 304–317. Springer.
J
´
egou, H., Douze, M., Schmid, C., and P
´
erez, P. (2010). Ag-
gregating local descriptors into a compact image rep-
resentation. In Computer Vision and Pattern Recogni-
tion (CVPR), 2010 IEEE Conference on, pages 3304–
3311. IEEE.
Kalantidis, Y., Mellina, C., and Osindero, S. (2015). Cross-
dimensional weighting for aggregated deep convolu-
tional features. arXiv preprint arXiv:1512.04065.
Khan, F. S., Anwer, R. M., Van De Weijer, J., Bagdanov,
A. D., Vanrell, M., and Lopez, A. M. (2012). Color
attributes for object detection. In Computer Vision and
Pattern Recognition (CVPR), 2012 IEEE Conference
on, pages 3306–3313. IEEE.
Lowe, D. G. (2004). Distinctive image features from scale-
invariant keypoints. International journal of computer
vision, 60(2):91–110.
Manger, D. and Willersinn, D. (2017). Extending the bag-
of-words representation with neighboring local fea-
tures and deep convolutional features. In 2017 Irish
Machine Vision and Image Processing Conference
(IMVIP).
Mark J. Huiskes, B. T. and Lew, M. S. (2010). New
trends and ideas in visual concept detection: The mir
flickr retrieval evaluation initiative. In MIR ’10: Pro-
ceedings of the 2010 ACM International Conference
on Multimedia Information Retrieval, pages 527–536,
New York, NY, USA. ACM.
Perronnin, F. and Dance, C. (2007). Fisher kernels on visual
vocabularies for image categorization. In 2007 IEEE
Conference on Computer Vision and Pattern Recogni-
tion, pages 1–8. IEEE.
Philbin, J., Chum, O., Isard, M., Sivic, J., and Zisserman, A.
(2007). Object retrieval with large vocabularies and
fast spatial matching. In 2007 IEEE Conference on
Computer Vision and Pattern Recognition, pages 1–8.
IEEE.
Philbin, J., Chum, O., Isard, M., Sivic, J., and Zisserman,
A. (2008). Lost in quantization: Improving partic-
ular object retrieval in large scale image databases.
In Computer Vision and Pattern Recognition, 2008.
CVPR 2008. IEEE Conference on, pages 1–8. IEEE.
Razavian, A. S., Sullivan, J., Maki, A., and Carlsson,
S. (2014). A baseline for visual instance retrieval
with deep convolutional networks. arXiv preprint
arXiv:1412.6574.
Simonyan, K. and Zisserman, A. (2014). Very deep con-
volutional networks for large-scale image recognition.
arXiv preprint arXiv:1409.1556.
Sivic, J. and Zisserman, A. (2003). Video google: A text
retrieval approach to object matching in videos. In
Computer Vision, 2003. Proceedings. Ninth IEEE In-
ternational Conference on, pages 1470–1477. IEEE.
Tolias, G., Sicre, R., and J
´
egou, H. (2015). Particular object
retrieval with integral max-pooling of cnn activations.
arXiv preprint arXiv:1511.05879.
Zhang, S., Tian, Q., Huang, Q., Gao, W., and Rui, Y. (2013).
Multi-order visual phrase for scalable image search.
In Proceedings of the Fifth International Conference
on Internet Multimedia Computing and Service, pages
145–149. ACM.
Zheng, L., Wang, S., Liu, Z., and Tian, Q. (2014). Packing
and padding: Coupled multi-index for accurate im-
age retrieval. In Proceedings of the IEEE Conference
on Computer Vision and Pattern Recognition, pages
1939–1946.
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
372
