
Anticipating Suspicious Actions using a Small Dataset of Action
Templates
Renato Baptista, Michel Antunes, Djamila Aouada and Bj
¨
orn Ottersten
Interdisciplinary Centre for Security, Reliability and Trust (SnT), University of Luxembourg, Luxembourg, Luxembourg
Keywords:
Action Templates, Alarm Generation, Skeleton.
Abstract:
In this paper, we propose to detect an action as soon as possible and ideally before it is fully completed. The
objective is to support the monitoring of surveillance videos for preventing criminal or terrorist attacks. For
such a scenario, it is of importance to have not only high detection and recognition rates but also low time
latency for the detection. Our solution consists in an adaptive sliding window approach in an online manner,
which efficiently rejects irrelevant data. Furthermore, we exploit both spatial and temporal information by
constructing feature vectors based on temporal blocks. For an added efficiency, only partial template actions
are considered for the detection. The relationship between the template size and latency is experimentally
evaluated. We show promising preliminary experimental results using Motion Capture data with a skeleton
representation of the human body.
1 INTRODUCTION
Many surveillance systems are composed of cameras
acquiring videos from specific locations and monito-
red by people (e.g. a security team) for detecting sus-
picious events and actions. It is a challenging task
to manually monitor video feeds 24/7. As a conse-
quence, only after criminal or terrorist attacks occur,
the recorded surveillance data is actually used for ana-
lyzing what happened at that specific moment.
Nowadays, there are many visual surveillance sy-
stems that apply computer vision techniques for auto-
matically detecting suspicious occurrences, including
“human violence” recognition and detection (Bilin-
ski and Bremond, 2016; Datta et al., 2002). General
action recognition and detection is a largely investiga-
ted topic by the computer vision community, showing
very promising results (Du et al., 2015; Gkioxari and
Malik, 2015; Wang and Schmid, 2013; Wang et al.,
2015; Papadopoulos et al., 2017). However, a major
concern in security applications is not only the accu-
rate detection and recognition of particular events or
actions, but also the time latency required for achie-
ving it. Many of the existing works are designed
for action recognition (Bilen et al., 2016; Du et al.,
2015; Fernando et al., 2016) and for offline action
detection (Gaidon et al., 2011; Gkioxari and Malik,
2015; Jain et al., 2014; Tian et al., 2013; Wang et al.,
2015; Papadopoulos et al., 2017). These methods re-
... ... ...
Figure 1: Alarm generation for a suspicious action during
an online stream from a video surveillance camera. The
green color represents a normal action and the blue color
the ground truth information. The goal is to detect the sus-
picious action as soon as possible and ideally before it is
fully completed. The orange flags represent the alarms that
were generated during the video using our approach, and
the red flag corresponds to the first alarm that was genera-
ted for the suspicious action. Images used were extracted
from the CAVIAR dataset
1
.
quire that the action to be recognized is completely
acquired before the detection can be accomplished.
However, even if the recognition accuracy is 100%,
it is not recommended to use these approaches in se-
curity and surveillance applications, because an alarm
can only be issued after the event has occurred. An
alternative to these approaches would be an online
action detection approach, where the objective is to
detect an action as soon as it happens and ideally be-
fore the action is fully completed. Enabling to detect
an action with low latency can be useful in many vi-
1
http://homepages.inf.ed.ac.uk/rbf/CAVIAR
380
Baptista, R., Antunes, M., Aouada, D. and Ottersten, B.
Anticipating Suspicious Actions using a Small Dataset of Action Templates.
DOI: 10.5220/0006648703800386
In Proceedings of the 13th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2018) - Volume 5: VISAPP, pages
380-386
ISBN: 978-989-758-290-5
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

deo surveillance applications.
Recently, Hoai and De la Torre (Hoai and De la
Torre, 2012; Hoai and De la Torre, 2014) proposed
a learning formulation based on a structured output
Support Vector Machine (SVM) to recognize partial
events, resulting in an early detection. Detecting an
action in an online manner is not a trivial problem due
to the unpredictability of real word scenarios (Geest
et al., 2016; Li et al., 2016). Geest et al. (Geest
et al., 2016) proposed a more realistic dataset for on-
line action detection. The dataset consists of real life
actions that were professionally recorded from six re-
cent TV series (Geest et al., 2016). Li et al. (Li et al.,
2016) presented a deep learning based architecture
that allows to detect and recognize actions in an on-
line manner. The authors show very promising results
on a large dataset containing video streams. The ma-
jor weakness of this approach is that, being based on
deep learning methods, it requires a large amount of
data for training the overall architecture. Large data-
sets of criminal and terrorist attacks are usually not
available, because they only occur sporadically. This
means that training a deep architecture with many lay-
ers and parameters is highly challenging.
In this work, the objective is to detect suspicious
events and actions as soon as possible and ideally be-
fore they are fully completed. Note that, the goal of
this approach is to support the video surveillance rat-
her than being a completely automated system. We
propose to use an adaptive sliding window, which effi-
ciently rejects irrelevant data during streaming, toget-
her with a histogram based video descriptor and a ne-
arest neighbor assignment, which have the advantage
of efficient iterative computations. As the objective
is to support video surveillance and security monito-
ring applications, one prefers to have many alerts with
higher probabilities of detecting a suspicious action
with very low latency, Figure 1 illustrates an example
of a detection scenario using our approach. Similarly
to (Li et al., 2016; Meshry et al., 2015; Sharaf et al.,
2015), we use a skeleton representation of the human
body as it is robust to scale, rotation and illumination
changes, and it can be computed at high frame rate,
allowing real-time computations (Han et al., 2017).
Such a human body representation can be extracted
from human pose estimation algorithms (Pishchulin
et al., 2016). In contrast to (Li et al., 2016), our goal
is to avoid the requirement of a large amount of anno-
tated data. To that end, we propose to use a small da-
taset of suspicious actions and also to construct tem-
plate actions using different percentages of the action
to be detected. Furthermore, we present an analysis of
the influence of using partial information of the action
to be detected, showing that it is possible to achieve
competitive detection results when compared to using
the complete action sequence.
In summary, the contributions of this work are: 1)
an efficient algorithm for detecting actions using a
small dataset of template actions with low latency;
and 2) an analysis of the time needed to detect an
action using partial information of the action tem-
plate.
The paper is organized as follows: in Section 2,
we provide a brief introduction of the skeleton repre-
sentation of the human body and the problem formu-
lation for the proposed approach. Section 3 proposes
the online action detection method and how to con-
struct action templates. In Section 4, we describe and
discuss the experimental results and Section 5 conclu-
des the paper.
2 BACKGROUND & PROBLEM
FORMULATION
In this section, we introduce the skeleton human body
representation that is used throughout the paper. Let
us assume that a human action video is represented by
the spatial positions of the body joints (Antunes et al.,
2016; Baptista et al., 2017a; Baptista et al., 2017b;
Vemulapalli et al., 2014). A skeleton S = [j
1
,··· , j
N
]
is defined using N joints, and each joint is represented
by its 3D coordinates j = [ j
x
, j
y
, j
z
]
T
, where j
x,y,z
∈ R
3
and T denotes the matrix transpose. A human ske-
leton sequence is represented by H = {S
1
,··· , S
F
},
where F is the total number of frames. In order to
normalize each skeleton in a way that the size of each
body part is in correspondence, a spatial registration
is done by transforming each skeleton S, such that the
world coordinate system is placed at the hip center
and rotated in such a manner that the projection of the
vector from the left hip to the right hip is parallel to
the x-axis (Vemulapalli et al., 2014). Figure 2 shows
an example of the normalized skeleton with respect to
the world coordinate system placed at the hip center
and the enumerated skeleton joints. Each skeleton S
is then represented by the 3D normalized coordinates
of N joints as a vector of size 3N. In this work, we
adopt the same approach as in (Chu et al., 2012), and
a sequence H is represented using a bag of temporal
words model (Sivic and Zisserman, 2003; Yuan et al.,
2011). In this model, the codebook is built by using k-
means in order to group similar feature vectors. Each
skeleton S from H is discretized into histograms ac-
cording to the k-entry dictionary. Then, the resulting
representation of the sequence H is defined by the fea-
ture vector ϕ(H), which is the cumulative summation
of all the individual histograms of the sequence H.
Anticipating Suspicious Actions using a Small Dataset of Action Templates
381

0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
x
y
z
LR
Figure 2: Representation of the normalized skeleton with
respect to the world coordinate system placed at the hip cen-
ter (joint number 0). L and R stand for the left and right side
of the human body, respectively.
Considering an action template A
T
of length T ,
and a subsequence of an input human action H
t
s
⊂ H
starting from frame s to the current frame t, i.e., H
t
s
=
{S
s
,··· , S
t
} such that 1 < s,t < F, the objective is to
estimate the starting point ˆs of the action of interest
such as (Chu et al., 2012):
ˆs = argmin
s
d(ϕ(H
t
s
),ϕ(A
T
)) s.t. t −s ≥ L, (1)
where L is the minimum length of the interval of in-
terest and d is a distance function measuring dissi-
milarity between histograms. In (Chu et al., 2012),
equation (1) is solved considering the full sequence H,
while in the problem at hand, the objective is to find a
solution in an online manner. To that end, we propose
to follow an efficient adaptive sliding window strategy
combined with: 1) adding temporal information to the
spatial feature representation ϕ(·); and 2) decreasing
the amount of data required from the action template.
The proposed approach is detailed in Section 3.
3 PROPOSED APPROACH
We herein describe the proposed method for online
action detection and how action templates are defined.
First of all, the temporal information is added by
aggregating a consecutive number b of skeletons S to-
gether as a new (b ×3N)-dimensional vector, where b
defines the number of considered consecutive frames,
also known as the temporal block size. Then, the fe-
ature representation of the sequence H using b is re-
presented by ϕ
b
(H).
To solve (1), we compare the values of the dis-
tance function d for the two intervals w
1
= [s,t + 1],
0 150 300 450 600 750
Time (frames)
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Cost
d
W
1
d
W
2
d
min
τ
Action of Interest
Figure 3: Representation of the minimal distance d
min
over
time. The blue and red lines represent the cost for each
temporal window w
1
and w
2
, respectively. The yellow line
represents the smallest distance between the distances cor-
responding to the two temporal windows w
1
and w
2
over
time. τ defines the threshold to validate a detection.
and w
2
= [s + 1,t + 1] corresponding to the two sub-
sequences H
t+1
s
and H
t+1
s+1
, respectively. We denote
by d
w
1
and d
w
2
the resulting distances with respect to
the template action A
T
. The distance function d is
the Euclidean distance between histograms. The mi-
nimum of the two, d
min
= min(d
w
1
,d
w
2
) is saved until
a new minimum is found, and the start point is accor-
dingly updated. This means that, if d
min
is obtained
from w
2
, the start point will be increased by one for
the next time instant t + 2. In this case, the method
rejects irrelevant data while it searches for the best
start point of the action of interest. The minimal dis-
tance vector d
min
is then the stored values of d
min
over
time, i.e., d
min
= [d
min
]. As a temporal function, d
min
starts to decrease as soon as the action of interest
occurs, which means that in that interval the num-
ber of generated alarms increases significantly. An
action is considered detected when d
min
decreases by
a number of τ consecutive blocks. For every time
that the threshold τ is met, an alarm is generated. Fi-
gure 3 illustrates the relation of the distance function
over time for the two temporal windows w
1
and w
2
,
and d
min
. As shown in Figure 3, the action is detected
as soon as d
min
decreases for a consecutive number
of blocks τ. Note that, in this example, d
min
is decre-
asing during the ground truth interval, which means
that while the action is happening, a relative number
of alarms are generated for each time that the thres-
hold τ is met. Then, the alarm of interest is the first
alarm that is generated within the ground truth inter-
val.
As the objective is to detect an action as soon
as possible with low latency, using subsequences of
the template action can be advantageous to detect an
action before it is fully completed since less data is
used. Therefore, we propose to use partial action tem-
plates from the full action A
T
. We define subsequen-
ces A
pT
⊂ A
T
, for 0 < p ≤ 1. Similarly to the ag-
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
382

gregated feature vectors ϕ
b
defined for H, for each
subsequence A
pT
, a histogram is created by accumu-
lating individual blocks, where each block of size b
is assigned according to the k-entry codebook. Then,
the representation of an action template ϕ
b
(A
pT
) is
the average of all histograms of the same suspicious
action.
4 EXPERIMENTAL RESULTS
In this section, we evaluate the detection and the time
to detection performance on the public CMU-Mocap
dataset
3
. From this dataset we select a set of acti-
ons from different subjects that fall into two different
groups, the normal and the suspicious actions. The
actions “walking”, “standing” and “looking around”
are considered as normal actions, and the actions
“running”, “punching” and “kicking” are considered
as suspicious actions. Each sequence from the dataset
was recorded at 120 frames per second (fps). To make
it more realistic for surveillance purposes, we downs-
ample each sequence by a factor of 4, resulting in a 30
fps sequence. Figure 4 shows an example of the ske-
leton representation of human body while a suspici-
ous action is happening and the corresponding alarm
generation.
0 100 200 300 400 500 600
Time (frames)
0.2
0.4
0.6
0.8
1
Cost
d
W1
d
W2
d
min
Figure 4: Skeleton representation of the human body while
a suspicious action is happening, in this case: “Punching”.
The orange arrows represent the alarms that were generated
over time and the red arrow is the alarm of interest which is
the first alarm generated within the ground truth.
4.1 Blocks vs. Threshold
In order to evaluate the detection and the time needed
to detect an action, we simulate an input video stream
by randomly concatenating normal actions before and
after the suspicious action (action of interest). First,
3
http://mocap.cs.cmu.edu
we start by evaluating the relation between the block
size b and the detection accuracy. Moreover, an eva-
luation of the time needed to detection is also done
in order to see how much X % of the action was nee-
ded to complete a detection. We determine a correct
detection if the minimal distance function d
min
decre-
ases by τ consecutive blocks and if the resulting de-
tection is within the ground truth interval. A range of
different values for the parameters were tested and for
the best detection accuracy with the lowest latency.
We fix b = 3 frames and τ = 2 for the following expe-
riments. Figure 5(a) and 5(d) illustrate the detection
accuracy using different lengths of the subsequence
of the template action. Figure 5(b) and 5(e) show
an evaluation of the time needed to detect an action
for the different subsequences of the template action,
where the lowest latency obtained is around 12%. In
these experiments, it is shown that the proposed ap-
proach can be applied on a wide range of applications
for video surveillance. For applications that require
fast detection, the value of the threshold τ should be
lower and on the other hand, if the application requi-
res a more precise detection and the latency is not a
constraint, the threshold value should be higher. For
example, in a multi screen surveillance monitoring
system, when detection occurs, an alarm is flagged
for the specific screen where the action is happening.
This will get the attention of the security guard, to
then analyse the action and make a decision. Such
applications allow a less sensitive system, where a
false alarm can be generated without compromising
the security, since it only alerts the security guard to
look at the camera where the alarm was generated. Fi-
gure 5(c) and 5(f) show the average number of alarms
that were generated per video. Furthermore, it also
shows the number of positive alarms per video, where
each color represents the number of correct detecti-
ons per video for the different b and τ. Note that,
using b = 2 until b = 5, the latency is between 12%
and 22% and the detection accuracy is between 68%
and 81%. Considering this and depending on the ap-
plication, these parameters can be tuned with respect
to the desired number of generated alarms per video.
Increasing the number of temporal blocks will reduce
the number of alarms that are generated per video.
4.2 Impact of the Size of the Template
Action
In order to evaluate the impact of the size of the sub-
sequences of the template action, we use the follo-
wing percentages of the initial part of the action p =
1
10
,
1
4
,
1
2
and the full action. We propose these subse-
quence lengths in order to understand the relations-
Anticipating Suspicious Actions using a Small Dataset of Action Templates
383

2 3 4 5 7 9
Block Size b
0.5
0.6
0.7
0.8
0.9
1
Average Detection (%)
p = 1/10
p = 1/4
p = 1/2
p = 1
(a) Average detection for τ = 2 blocks.
2 3 4 5 7 9
Block Size b
0
0.1
0.2
0.3
0.4
0.5
Time To Detection (%)
p = 1/10
p = 1/4
p = 1/2
p = 1
(b) Time to detection for τ = 2 blocks. (c) Average of positive alarms that were
generated per video for τ = 2 blocks. The
blue dotted line represents the total num-
ber of generated alarms per video (posi-
tive and negative alarms).
2 3 4 5 6
0.5
0.6
0.7
0.8
0.9
1
Average Detection (%)
p = 1/10
p = 1/4
p = 1/2
p = 1
(d) Average detection for b = 3 frames.
2 3 4 5 6
0
0.1
0.2
0.3
0.4
0.5
0.6
Time To Detection (%)
p = 1/10
p = 1/4
p = 1/2
p = 1
(e) Time to detection for b = 3 frames. (f) Average of positive alarms that were
generated per video for b = 3 frames.
The blue dotted line represents the to-
tal number of generated alarms per video
(positive and negative alarms).
Figure 5: In the first row of images we fixed τ = 2 blocks and computed the average detection, the time to detection and the
average number of alarms and also the number of positive alarms that were generated per video for the different temporal
blocks b, respectively. In the second row we proceed with the same experiments, fixing the block size b = 3 frames for
different τ blocks.
hip between the size of the template action and the
time needed to detect the action. Figure 6 shows
the average detection accuracy for the different sub-
sequences of the template action. The best detection
accuracy obtained is for b = 3 frames and for p =
1
2
.
This means that using half of the action as a subse-
quence of the template action, we achieve competitive
detection results with low latency. This setup can be
advantageous for applications where the action needs
to be detected with low latency. In addition, using
only a percentage of the initial part of an action can
decrease the time needed to detect an action, resulting
in a faster detection. Table 1 shows the detection
accuracy for each suspicious action separately. Note
that, for the action “Punching” the detection is hig-
her due to the fact that this action is more discrimina-
tive for the upper limbs when compared with the other
Table 1: Detection accuracy (%) for the following scena-
rio: b = 3 frames and τ = 2 blocks, for p =
1
10
,
1
4
,
1
2
and 1.
Actions
p
1
10
1
4
1
2
1
Running 61.23 44.95 70.82 79.87
Kicking 76.7 81.73 84.17 60.76
Punching 95.83 90.08 91.89 90.67
two suspicious actions. One possible way to increase
the detection accuracy for all actions would be a more
robust representation, such as the relative position of
the joints or a Fourier Temporal Pyramid (Vemula-
palli et al., 2014) representation. We did not imple-
ment these representations to avoid the complexity of
the descriptors in order to have a better understanding
of the performance and characteristics of the propo-
sed method.
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
384
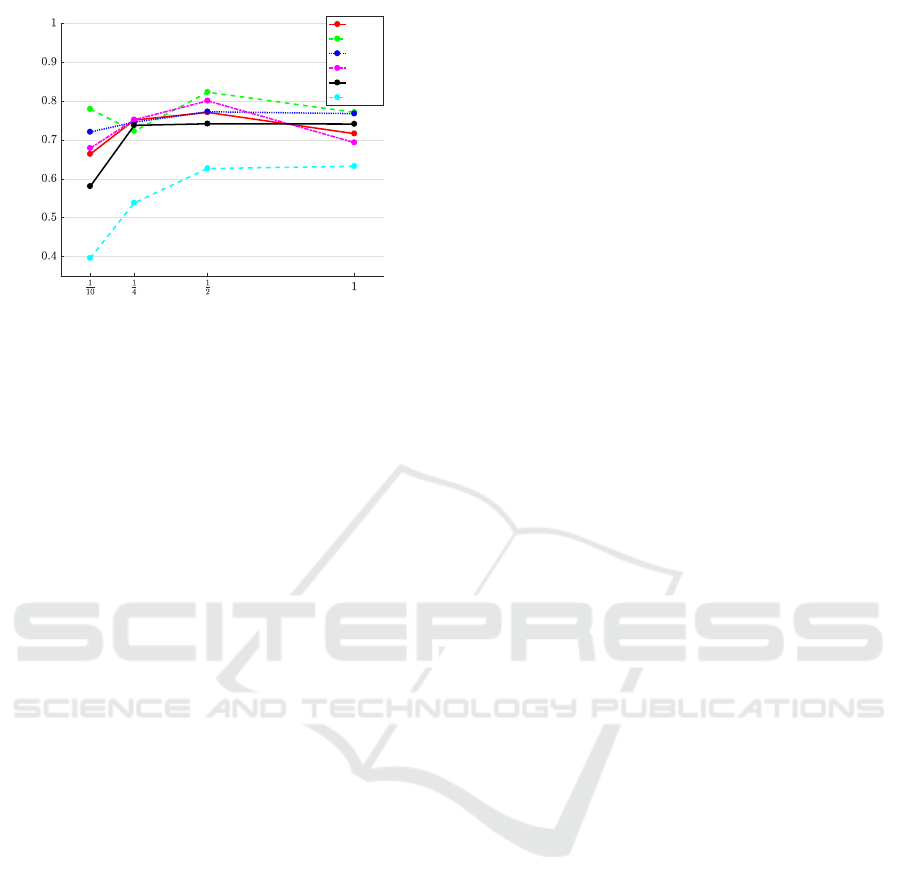
Percentages p of the action
Average Detection (%)
b = 2
b = 3
b = 4
b = 5
b = 7
b = 9
Figure 6: Average detection for the different subsequences
with length p of the template action for τ = 2.
5 CONCLUSIONS
In this paper, we proposed an online method to detect
suspicious actions with low latency. This method is
based on an adaptive sliding window which efficiently
rejects irrelevant data during streaming. We explored
the feature representation of a subsequence using the
spatial and temporal information of the video stream.
Furthermore, we evaluated the relationship between
the size of the template action and latency, where we
conclude that using half of the action as a template
action, the detection accuracy and the time needed to
detect the action achieve competitive and promising
results compared to using the full action as a tem-
plate. We also observed that tuning the parameters,
the method can be used for different setups of video
surveillance. Next, we intend to use real surveillance
videos coupled with a robust human pose detection
approach, e.g. (Pishchulin et al., 2016).
ACKNOWLEDGEMENTS
This work has been partially funded by the Natio-
nal Research Fund (FNR), Luxembourg, under the
CORE project C15/IS 10415355/3D-ACT/Bj
¨
orn Ot-
tersten. This work was also supported by the Euro-
pean Union‘s Horizon 2020 research and innovation
project STARR under grant agreement No.689947.
REFERENCES
Antunes, M., Baptista, R., Demisse, G., Aouada, D., and
Ottersten, B. (2016). Visual and human-interpretable
feedback for assisting physical activity. In European
Conference on Computer Vision (ECCV) Workshop on
Assistive Computer Vision and Robotics Amsterdam,.
Baptista, R., Antunes, M., Aouada, D., and Ottersten, B.
(2017a). Video-based feedback for assisting physical
activity. In International Joint Conference on Compu-
ter Vision, Imaging and Computer Graphics Theory
and Applications (VISAPP).
Baptista, R., Antunes, M., Shabayek, A. E. R., Aouada, D.,
and Ottersten, B. (2017b). Flexible feedback system
for posture monitoring and correction. In IEEE In-
ternational Conference on Image Information Proces-
sing (ICIIP).
Bilen, H., Fernando, B., Gavves, E., Vedaldi, A., and Gould,
S. (2016). Dynamic image networks for action recog-
nition. In The IEEE Conference on Computer Vision
and Pattern Recognition (CVPR).
Bilinski, P. and Bremond, F. (2016). Human violence re-
cognition and detection in surveillance videos. In Ad-
vanced Video and Signal Based Surveillance (AVSS),
2016 13th IEEE International Conference on, pages
30–36. IEEE.
Chu, W.-S., Zhou, F., and De la Torre, F. (2012). Unsu-
pervised temporal commonality discovery. In Euro-
pean Conference on Computer Vision, pages 373–387.
Springer Berlin Heidelberg.
Datta, A., Shah, M., and Da Vitoria Lobo, N. (2002).
Person-on-person violence detection in video data. In
Proceedings of the 16 th International Conference on
Pattern Recognition (ICPR’02) Volume 1 - Volume
1, ICPR ’02, pages 10433–, Washington, DC, USA.
IEEE Computer Society.
Du, Y., Wang, W., and Wang, L. (2015). Hierarchical recur-
rent neural network for skeleton based action recog-
nition. In The IEEE Conference on Computer Vision
and Pattern Recognition (CVPR).
Fernando, B., Gavves, E., Oramas, J., Ghodrati, A., and
Tuytelaars, T. (2016). Rank pooling for action recog-
nition. IEEE Transactions on Pattern Analysis and
Machine Intelligence.
Gaidon, A., Harchaoui, Z., and Schmid, C. (2011). Actom
Sequence Models for Efficient Action Detection. In
CVPR 2011 - IEEE Conference on Computer Vision
& Pattern Recognition, pages 3201–3208, Colorado
Springs, United States. IEEE.
Geest, R. D., Gavves, E., Ghodrati, A., Li, Z., Snoek, C.,
and Tuytelaars, T. (2016). Online action detection.
CoRR, abs/1604.06506.
Gkioxari, G. and Malik, J. (2015). Finding action tubes.
Han, F., Reily, B., Hoff, W., and Zhang, H. (2017). Space-
time representation of people based on 3d skeletal
data: A review. Computer Vision and Image Under-
standing, pages –.
Hoai, M. and De la Torre, F. (2012). Max-margin early
event detectors. In Proceedings of IEEE Conference
on Computer Vision and Pattern Recognition.
Hoai, M. and De la Torre, F. (2014). Max-margin early
event detectors. International Journal of Computer
Vision, 107(2):191–202.
Jain, M., van Gemert, J. C., J
´
egou, H., Bouthemy, P., and
Snoek, C. G. M. (2014). Action localization by tube-
Anticipating Suspicious Actions using a Small Dataset of Action Templates
385

lets from motion. In IEEE Conference on Computer
Vision and Pattern Recognition.
Li, Y., Lan, C., Xing, J., Zeng, W., Yuan, C., and Liu, J.
(2016). Online human action detection using joint
classification-regression recurrent neural networks.
European Conference on Computer Vision.
Meshry, M., Hussein, M. E., and Torki, M. (2015). Action
detection from skeletal data using effecient linear se-
arch. CoRR, abs/1502.01228.
Papadopoulos, K., Antunes, M., Aouada, D., and Ottersten,
B. (2017). Enhanced trajectory-based action recogni-
tion using human pose. In IEEE International Confe-
rence on Image Processing (ICIP).
Pishchulin, L., Insafutdinov, E., Tang, S., Andres, B., An-
driluka, M., Gehler, P. V., and Schiele, B. (2016). Dee-
pcut: Joint subset partition and labeling for multi per-
son pose estimation. In Proceedings of the IEEE Con-
ference on Computer Vision and Pattern Recognition,
pages 4929–4937.
Sharaf, A., Torki, M., Hussein, M. E., and El-Saban, M.
(2015). Real-time multi-scale action detection from
3d skeleton data. In Applications of Computer Vi-
sion (WACV), 2015 IEEE Winter Conference on, pa-
ges 998–1005. IEEE.
Sivic, J. and Zisserman, A. (2003). Video Google: A text
retrieval approach to object matching in videos. In
IEEE International Conference on Computer Vision,
volume 2, pages 1470–1477.
Tian, Y., Sukthankar, R., and Shah, M. (2013). Spatiotem-
poral deformable part models for action detection. In
Proceedings of the 2013 IEEE Conference on Compu-
ter Vision and Pattern Recognition, CVPR ’13, pages
2642–2649, Washington, DC, USA. IEEE Computer
Society.
Vemulapalli, R., Arrate, F., and Chellappa, R. (2014). Hu-
man action recognition by representing 3d skeletons
as points in a lie group. In Proceedings of the IEEE
Conference on Computer Vision and Pattern Recogni-
tion.
Wang, H. and Schmid, C. (2013). Action recognition with
improved trajectories. In IEEE International Confe-
rence on Computer Vision, Sydney, Australia.
Wang, Z., Wang, L., Du, W., and Qiao, Y. (2015). Exploring
fisher vector and deep networks for action spotting. In
The IEEE Conference on Computer Vision and Pattern
Recognition (CVPR) Workshops.
Yuan, J., Liu, Z., and Wu, Y. (2011). Discriminative video
pattern search for efficient action detection. Pattern
Analysis and Machine Intelligence, IEEE Transacti-
ons on, 33(9):1728–1743.
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
386
