
Plantation Rows Identification by Means of Image Tiling and Hough
Transform
Guilherme Afonso Soares, Daniel Duarte Abdala and Mauricio Cunha Escarpinati
Faculty of Computing, Federal University of Uberl
ˆ
andia, Uberl
ˆ
andia, Brazil
Keywords:
Image Processing, Crop Lines Identification, Precision Agriculture.
Abstract:
In this work we address the problem of plantation rows identification on UAV imaged coffee crop fields. A fair
number of approaches address the problem using the Hough Transform. However it assumes the plantation
lines are straight which is hardly the case in Aerial images. We propose a tiling scheme which allows one to
acceptably approximate the rows inside each tile to straight lines making it feasible to apply the Hough Trans-
form. Experimental results compared to ground truths seems to indicate the proposed approach successfully
approximate real plantation rows.
1 INTRODUCTION
Nowadays precision agriculture is heavily dependent
on imaging and mapping technologies e.g. for esti-
mating growth (Kataoka et al., 2003), or identifying
other important agronomic characteristics (Sankaran
et al., 2015) such as nitrogen stress (Blackmer and
Schepers, 1996). Advances in Unmanned Aerial Ve-
hicles - UAV - technology led to its widespread popu-
larization. With the corresponding drop in operational
costs even smaller plantations are now able to afford
the usage of imaging aided technologies.
The latest economic report by the Association
of Unmanned Aerial Vehicle International (AUVSI,
2013) points out the agricultural market is by far the
largest segment for UAVs. In the United States alone
it is forecast to create thousands of new jobs and con-
siderable revenue and taxes. With the market growth
production costs are expected to drop. It in turn will
allow smaller enterprises such as family and small
agricultural cooperatives (Turner et al., 2016) to bene-
fit from the diminished operational costs to also make
use of precision agriculture aided by UAVs. Other
countries like Japan are also making extensive use of
UAVs in agriculture and in Brazil a number of startup
companies such as Sensormap, Orion and Sensix to
cite just a few are producing and commercializing
UAVs.
There are obvious market for UAVs been agricul-
ture the most prominent example. The technology
is mature and the market offers a number of cost ef-
fective solutions. However, the market lacks reliable
software to process the remote sensed data. With
the dawn of UAVs to adapt solutions derived from
previously used aerial vehicles would be the obvious
choice. However, the available software was devel-
oped for vehicles that capture images on either high
(planes and helicopters) or ultra-high (satellites) alti-
tudes. The problem is further complicated by the fact
that much of the existing software on the market is
proprietary.
In this context the need of developing new soft-
ware able to dealing with low or medium altitude im-
agery became clear. Additionally the development of
new, better and cheaper imaging sensors opens new
avenues of exploration.
New application niches are opening in precision
agriculture aided by low/average altitude remote sens-
ing. Among them, a key problem is to identify where
the planting rows are located in the imaged field. This
procedure is important for crop planning, produc-
tion estimation, plant counting, harvesting and early
correction of failures in sowing. Considering the
imaging processing techniques available, the Hough
Transform (Hough, 1962) figures as an initial clear
choice. As shown in (Illingworth and Kittler, 1988)
it is widely used in identifying fixed parameterized
shapes formed by points on images. The basic Hough
Transform works well for regular geometric forms,
like straight lines and circles, but it can also be used
to find arbitrary shapes (Ballard, 1981). However it
requires that the object shape to be known in advance,
which limits its application on plantation row track-
ing. It is worth notice that sometimes crops follow
Soares, G., Abdala, D. and Escarpinati, M.
Plantation Rows Identification by Means of Image Tiling and Hough Transform.
DOI: 10.5220/0006657704530459
In Proceedings of the 13th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2018) - Volume 4: VISAPP, pages
453-459
ISBN: 978-989-758-290-5
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
453

the terrain, are hindered by obstacles or any other ar-
bitrary unknown geographical feature. Nonetheless a
number of solutions were proposed using the Hough
Transform as basis.
In (Ronghua and Lijun, 2011) a crop row detec-
tion algorithm is presented using as basis the Hough
Transform. It works on ground level images taken
manually with a hand camera. In (Leemans and
Destain, 2006) a row localization method is proposed
in which uses an adaptation of the Hough Transform.
It also works on ground level images captured by a
camera mounted on a tractor. The method is specifi-
cally tunned to deal with early sowing and was tested
only with chicory. In (Søgaard and Olsen, 2003)
approaches the problem from a similar perspective.
Since those methods operate on images captured by
tractor mounted cameras, they make the assumption
that plantation rows can be approximated by straight
lines. In (Garc
´
ıa-Santill
´
an et al., 2017) such approxi-
mation is not used. However, it also uses ground level
images. It assumes a few properties about the images,
such as the fact that there will be roughly vertical lines
starting at the image bottom. It also uses a local ap-
proach, whereas this work proposes to find the lines
on the whole mapped area. There are approaches for
finding general curves from a set of points, as de-
scribed in (Lee, 2000). These approaches require the
set of points to comprise only one curve.
Differently from ground level imagery, in low to
mid altitude aerial images plants are perceived as vari-
ations in green intensity and can commonly be inter-
twined with weed. In (Ramesh et al., 2016) a image
processing procedure is presented to identify rows of
tomato plants using images from a multi spectral cam-
era mounted on a quad-copter. The images used in
this study were captured in low altitude (a few meters
above de ground) and there are no visible vegetation
other than the plants of interest.
In dealing with coffee plantations its is very com-
mon for the plantation rows to follow natural geo-
graphical features within the field. The implication
is translated in plants been sowed following curves.
Previously reviewed methods based on the Hough
Transform would most likely fail on such images.
They were specifically designed to deal with plan-
tation rows that can be considered straight. This is
not an issue if the images were captured by a cam-
era mounted on a tractor navigating the field. Images
sensed by UAV mounted cameras are naturally more
cost effective, despite the fact that the final results
shows a much broader spatial resolution. The rows
will be curved and the Hough Transform will fail in
identifying meaningful plantation rows.
In this work we address the problem of coffee
Figure 1: Typical coffee plantation plantation following the
geographical features of the field. Locally, segments of the
curves can be approximated to straight lines.
plantation rows identification on images sensed by
UAV mounted RBG camera from up to 100m above
the plantation level. This image source impose a re-
striction in using the Hough Transform since the plan-
tation lines cannot be considered straight. Similarly to
previously discussed methods, the Hough Transform
is the basis of our algorithm. To make it feasible the
input image is first divided in a set of partially over-
lapped tiles. In doing so, each plantation line segment
can be roughly approximated to a locally straight line,
making the application of the Hough Transform fea-
sible. Fig. 1 depicts this situation. As one can see,
the plantation lines highlighted are curved. If a tile
small enough is considered they can be successfully
approximated to straight lines.
The main contribution of this work is the proposal
of a procedure to extract from mid altitude images
plantation row segments. The final result of this al-
gorithm are sets of simple, very short lines which ap-
proximate quite precisely real plantation lines. Sub-
sets of those lines present a high level of overlap-
ping allowing subsequent partition and by means of
interpolation procedures to extract the final plantation
lines.
The remainder of this paper is organized as fol-
lows. In Section 2 the algorithm for plantation lines
identification is presented. Section 3 present the
experiments and a discussion of the results. Sec-
tion 4 presents conclusions and possible future devel-
opments.
2 METHODS
The input data is comprised of images of coffee plan-
tations captured by UAV mounted RGB camera flying
on average at 100 meters above the plantation. The
way drone sensing works a series of small images are
captured and afterwards they are composed by imag-
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
454

ing mosaicking techniques into a single piece. At the
end of the process a color image I is outputted with di-
mensions approximately 1800 ×1550 pixels. Prior to
the identification of the plantation rows it is required
that some preprocessing takes place in order to make
it adequate for the application of the Hough Trans-
form.
2.1 Preprocessing
Once the input image is available it has to undergo a
preprocessing step in order to prepare it for the appli-
cation of the Hough Transform. The aim is twofold:
a) remove extraneous objects as much as possible; and
b) salient the actual plants. This is accomplished by
means of the following image processing pipeline.
Figure 2: Processing Steps: a) Gray Level conversion; b) k-
means binarization; c) Morphological Closing; d) Morpho-
logical Erosion; e) Morphological Skeleton and Pruning; f)
Hough Transform.
2.1.1 Color Remapping
In this first step, the color image is remapped to gray
scale. This is a simple procedure that can be accom-
plished by taking the arithmetic average of the three
color channels, e.g. Gray(x,y) = (R(x,y) +G(x,y) +
B(x,y))/3. Fig. 2-a shows a plantation tile after the
conversion to gray scale.
2.1.2 Binarization
The grayscale image is binarized by means of a sim-
ple clustering function. The aim is to divide the image
pixels into two very distinct classes: a) plants; and b)
ground and extraneous objects. Due to the fact the
imaging procedure can take place in a number of dif-
ferent atmospheric conditions simple thresholding is
usually not enough to provide the needed discrimina-
tive power on this wide variation of conditions.
Firstly two centroid values are picked by inspect-
ing the minimum and maximum pixel values of the
image. The K-means algorithm is then set to run.
Eventually it outputs two classes of pixels. One of
those classes is composed by the pixels of plants and
the other is mostly ground and extraneous objects.
Experimentally it was observed the plants cluster per-
tains circa 40% and the ground cluster circa 60% of
the total. A simple decision rule was sufficient to
decide which cluster represents the foreground and
which represents the background in all images used
in the experiments. The result achieved by clustering
binarization can be observed in Fig. 2-b.
2.1.3 Opening & Closing
The opening of the binary image is done by the ‘disk’
structuring element with value 4. For a close opera-
tion a ‘line’ structuring element is used with the ra-
dius 4. The morphological operations are shown in
Fig. 2-c and 2-d. The resulted images shows contigu-
ous figure and all rows are separated individually.
2.1.4 Thickness Pruning
A second opening/closing convolution is used in order
to eliminate discontinuities present in the image. This
is accomplished by using a diamond shaped kernel of
size 4. Later on, to reduce the thickness of the de-
tected lines, a operation of skeletonization is applied,
followed by a pruning algorithm. The structuring ele-
ment ‘Morph Cross’ is used with radius 3. The skele-
tonized results of this process is shown in the Fig. 2-e.
At this point the image is ready to be tiled. The
computation of window coordinates is tricky and
therefore deserves a detailed discussion.
2.2 Input Image Subdivision
As discussed earlier the direct application of the
Hough Transform to identify the plantation lines on
the entire image is not feasible, once it is not capable
of detecting curves. The proposed method is an al-
ternative front of the traditional method, on which it
is applied locally, using small tiles in which the seg-
ments could be accurately approximated to straight
lines. Experimentally it was observed this approach
indeed works. However if the windows are taken
without no overlap serious discontinuities in the plan-
tation lines will occur. Therefore we propose the tiles
to be taken with some degree of superposition. Fig. 3
shows some tiling examples. In a) the tiles are taken
without overlap and in b) 25% of the tile size is over-
lapped. In c) we observe the effect of not using tile
overlap. Line segments tend to present considerable
discontinuity. Finally in d) it became clear that by
overlapping the tiles to some extent such discontinu-
ities are mostly removed.
Plantation Rows Identification by Means of Image Tiling and Hough Transform
455
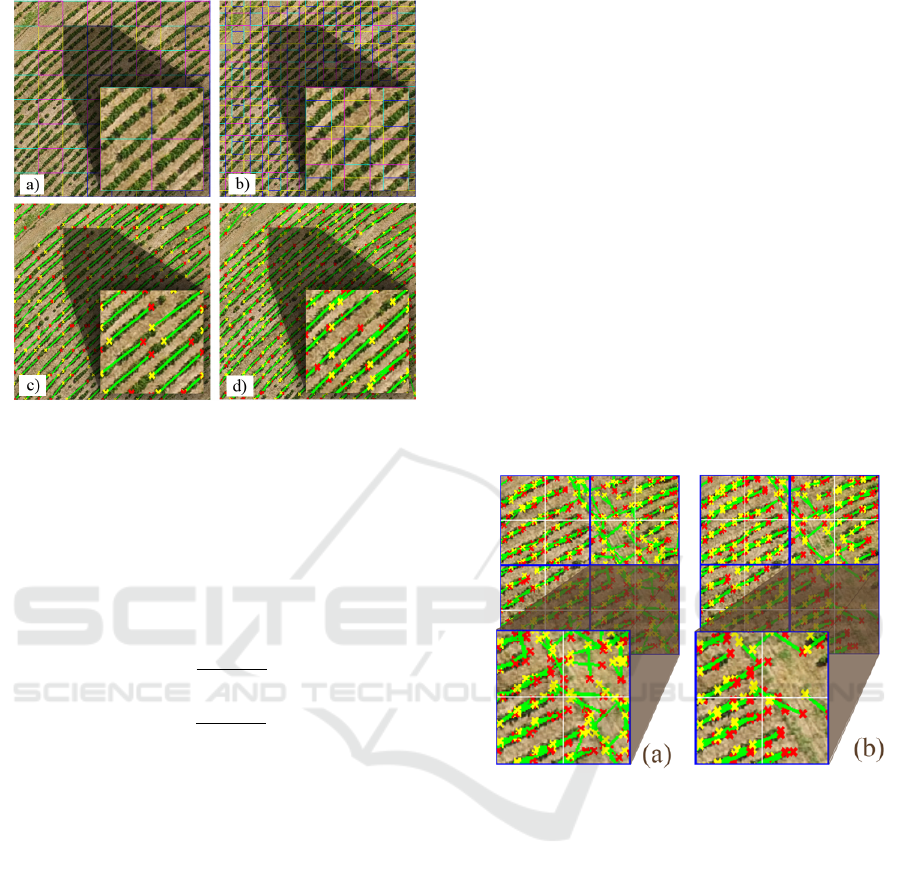
Figure 3: Overlap Strategy: a) image windowed with-
out overlap; b) image windowed with overlap of 25%;
c)Processed image windowed without overlap; d) Processed
image windowed with overlap of 25%.
The computation of the tiles coordinates can be
tricky. Therefore, we define two parameters. The first
one β represents the size (in pixels) of the square tile.
The second parameter α represents the degree of over-
lap desired.
c = d
w
β(1 − α)
e
r = d
h
β(1 − α)
e
(1)
In order to compute the coordinates of each win-
dow we first require to estimate the number of tiles
in each row and column. Equation 1 specifies how to
compute the number of columns - c - and rows - r - for
a given image. It depends of the width - w - and height
- h - of the image as well as the size of the desired win-
dow and the degree of overlap. The ceil operator is
taken to ensure a round number of columns and rows
since there is a possibility the mosaicking of windows
will not fit perfectly inside the image. In such cases
tiles located in the rightmost column and bottom row
will potentially be not squared and smaller in compar-
ison to the other tiles.
The coordinates of each tile can be computed us-
ing Equations 2. [x
l
,y
u
] correspond to the upper left
coordinate of the window and [x
r
,y
b
] to the bottom
right. Variables i and j are the row and column in-
dexes of the windows grid over the image. The win-
dowing strategy is depicted in Fig. 3.
x
l
(i) = i(β(1 − α)), 0 ≤ i ≤ c
y
u
( j) = j(β(1 − α)), 0 ≤ j ≤ r
x
r
(i) = x
l
(i) + β
y
b
( j) = y
u
( j) + β
(2)
A side effect of the tiling scheme is the introduc-
tion of undesired artifacts not pertaining to the plan-
tation lines. Such artifacts can be seen as noise and
therefore a post processing filtering step is required.
2.3 Hough Transform and Post
Processing
Considering the coordinates of each tile, the method
proceeds by applying the Hough Transform. As out-
put, a set of lines (represented by its two end points)
is returned for each tile. The line segments can be
observed in Fig. 3 and 4.
Figure 4: Denoising example with 2 as index: a) Figure
without a denoising process; b) Figure with denoising algo-
rithm.
Although the overlap strategy solves the problem
of line discontinuity as side effect a number of ex-
traneous lines are produced. Therefore some filter-
ing is required as post processing in order to remove
such undesired lines. It happens in two stages: i)
inside each tile; and ii) using larger tiles with size
γ = ×1.5, ×2.0 or ×2.5 the size of the individual tiles,
γ is also called denoising index. The second stage is
necessary to further expunge erroneous segments. In
both stages the same set of steps are taken.
The noise removal starts by computing the angu-
lar coefficient m = ∆
y
/∆
x
for all lines in a tile. All
coefficients are then rounded to one decimal place.
The statistical mode is then computed for the angular
coefficients and it is taken as the orientation tendency
for the tile. All lines are inspected for intersection and
in identifying such event all lines but the one closest
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
456
to the tiles angular coefficient mode are removed. Af-
terwards all remaining lines are inspected with regard
to the distance of its angular coefficient to the mode.
Any line which differ from the mode for more than a
parameter δ are also removed. The difference should
be taken in absolute values. In our experiments δ was
set to 0.3 whose results are shown on Fig 4.
3 DATASETS AND
EXPERIMENTS
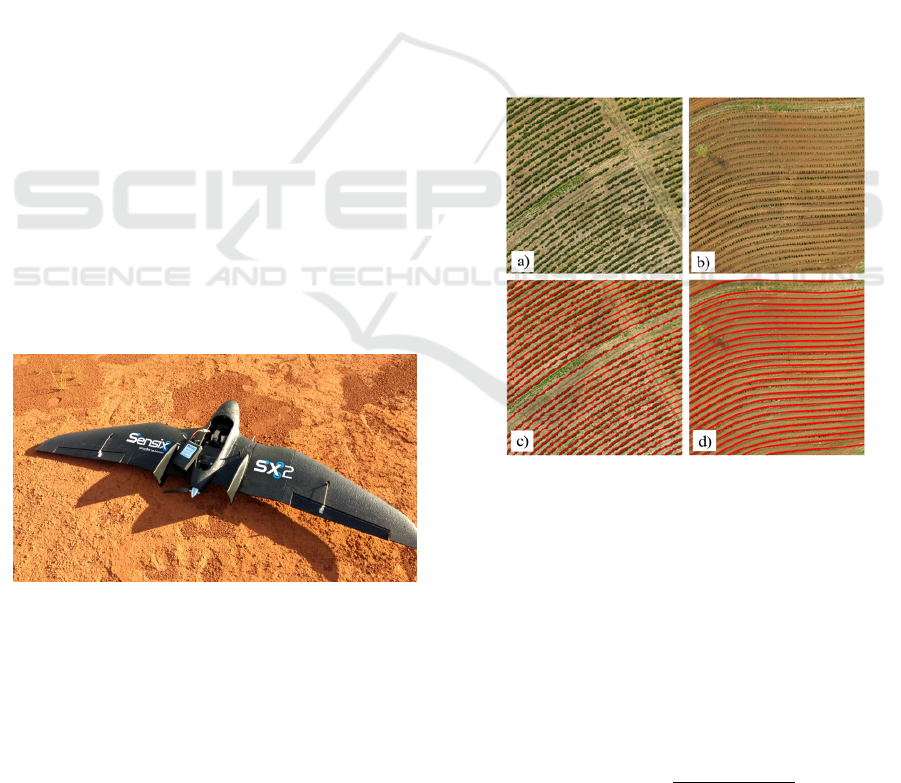
Eight distinct aerial images taken from a UAV named
sx2 (fig. 5) were used in our experiments. During cap-
ture the the vehicle flies between 100 and 150 meters
above the ground. It’s air speed must be at least 10
meters per second, not exceeding 15m/s. The UAV
is completely autonomous and can fly up to 1.5 hours
nonstop. The flight path is set to cover all analyzed
area. It is also configured that a snapshot of the plan-
tations is taken every 2 seconds. The RGB camera
used to take the pictures is a modified Canon S110.
Originally it can only capture red, green and blue
(RGB) frequencies, however to calculate the NDVI
the near-infrared spectrum is needed. Therefore, the
original optical filter is replaced for one that enables
the perception of the near-infrared channel, result-
ing in a near-infrared, green and blue (NIRGB) im-
age. For the purposes of this experiment, NIR was
taken as Red channel. In order to the results com-
parison, the images used in the tests are available in:
(http://www.facom.ufu.br/ mauricio/VISAPP2018/).
Figure 5: UAV utilized to capture crop images.
As previously presented, the proposed method de-
pends on three main parameters: size of tiles (β),
overlap percentage of (α) and denoising tile size (γ)
. In order to evaluate the performance of the proposed
algorithm in terms of the presented parameters, tests
were performed with different sets combining the val-
ues of β, α, and γ. The values used on those experi-
ments are presented by Table 1.
To evaluate the effectiveness of the proposed
methodology, the images used were taken from dif-
ferent coffee plantations and submitted to the pro-
posed algorithm. In order to assess the algorithm’s
accuracy under different commonly encountered con-
ditions, the images were taken with varying terrain,
atmospheric conditions and plant growth stages.
Each image had its ground truth manually gen-
erated by a specialist, who manually marked the in-
tended plantation rows. After applying the proposed
algorithm and obtaining a total of 36 variations from
each of the three images, the result was manually
evaluated considering its respective ground truth. The
crop lines were classified in three groups: a) in Green
segments of the plantation row correctly classified by
the algorithm; b) in Red were represented the seg-
ments not identified by the algorithm that actually are
part of the plantation row; and c) in Blue the seg-
ments identified by the algorithm that are not part of
the plantation row. Fig. 6-c,d shows the ground truth
generated prior to the application of the proposed al-
gorithm. Fig. 7 shows the manual classification pro-
cedure after.
Figure 6: Data Set Example: (a) and (b) are two original
images; (c) and (d) represent the images after ground truth
definition.
The values presented on table 1 were combined
generating 36 combinations of the parameters α, β
and γ. For the images processed under each of such
parameter set, the accuracy rate was obtained by
the equation (3). The values of true-positive, true-
negative, false-positive and false-negative were ob-
tained manually by direct measurements against the
ground truth. A example of this process is presented
on Fig. 7.
accuracy =
T P
T P + FN + FP
(3)
In order to measure the accuracy rate, the Jaccard
Plantation Rows Identification by Means of Image Tiling and Hough Transform
457
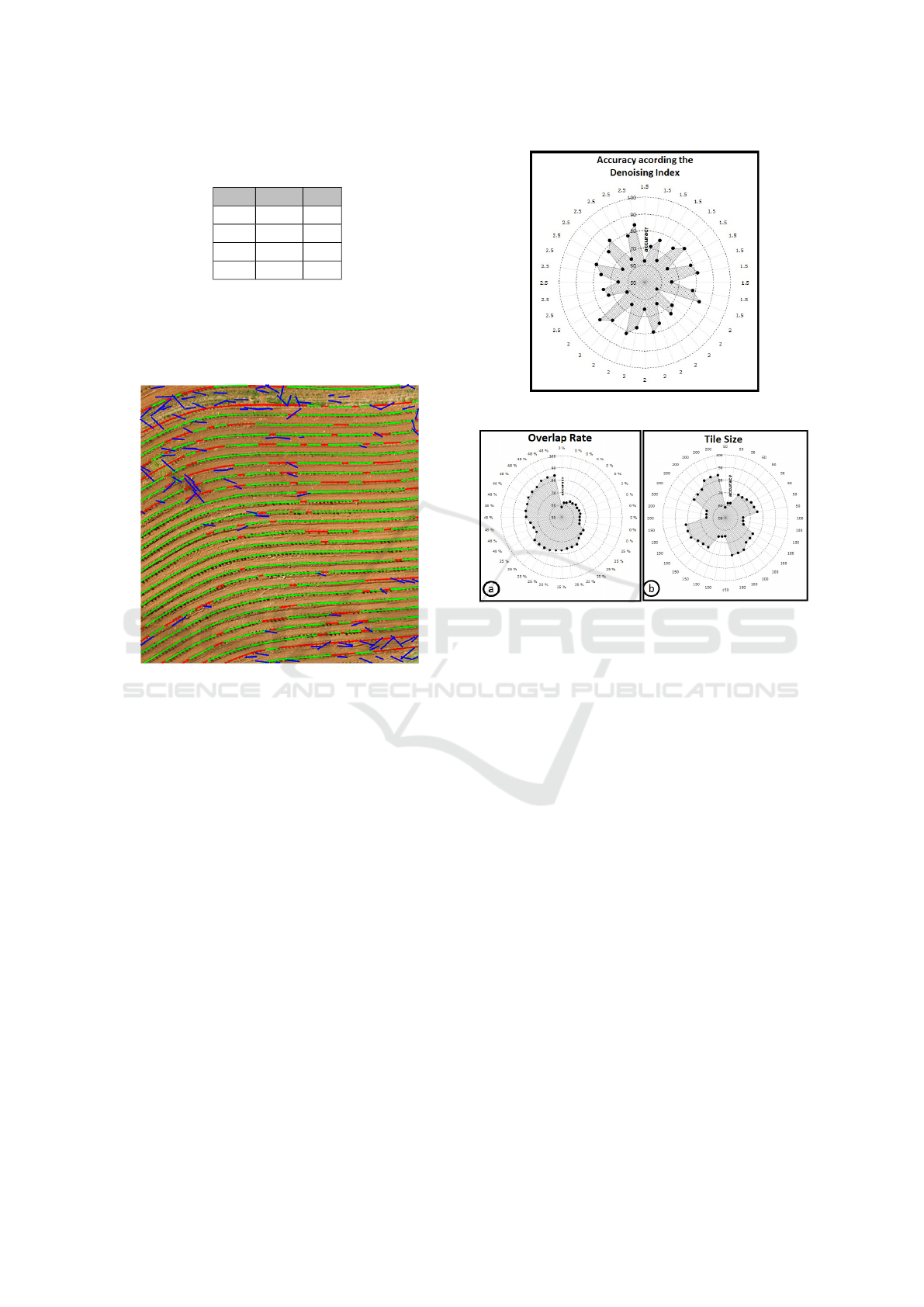
Table 1: Values tested for the variables used in the proposed
algorithm.
(β) (α) (γ)
50 0% 1.5
100 25% 2.0
150 48% 2.5
200 - -
Coefficient was used, since this index disregard the
true-negative values, what in this case, represents all
the image area with no crop lines, which could com-
promise the results.
Figure 7: Accuracy Analysis Example: red line = False-
Negative, blue line = False-Positive and green lines = True-
Positive.
The accuracy rate achieved in the experiments was
associated with which one of the parameters evalu-
ated. The chart presented on Fig. 8 relate the accuracy
rate with the denoising index. According to data rep-
resented on this graphic, is impossible to determine
a relationship between the accuracy rate and the de-
noising index.
However, by considering the relationship between
the tile size and the overlap rate with the accuracy
rate, the dependence between this values was made
clear. Especially when considered the values of over-
lap rate (Fig. 9-a). Higher values of overlap rate pro-
duce better accuracy scores. Experimentally, overlaps
larger than 48% haven’t succeed in improve the re-
sults.
A curious behavior can be observed regarding the
tile size defined by parameter (β). It is possible to
see on Fig. 9-b, that the results obtained fluctuates.
To understand this result is important to realize that
each value of β tested was combined with two oth-
ers parameters as represented on Table 1. Thus, were
generated and tested nine sets of parameters for each
Figure 8: Results obtained with the denoising algorithm.
Figure 9: Polar plot of (a) Accuracy×Overlap rate, and (b)
Accuracy×Tile size.
value of β. For the design of the chart represented on
9-b the data were sorted by the values of β as the first
criteria and by the overlap rate as the second criteria.
Thus is possible to realize that for the same values
of β the proposed algorithm achieve different accu-
racy values and they are totally dependent of the over-
lap rate value. The best results were obtained using
α = 0.48 and β = 200. Those values were then used
to apply the method on five other images in order to
test its reproductibility. It was possible to certify that
the average accuracy rate was maintained, with the
results on Table 2.
4 CONCLUSION
In this work were explored the application of Hough
Transform to extract plantation lines on UAV imaged
crop fields. In order to make it feasible were proposed
to tile the entire image into overlapped windows. This
approach accomplished to limit the information inside
each window to lines of manageable size which can
be considered locally straight making viable the use
of the Hough Transform. The overlapping windows
has shown to be a necessity in order to avoid discon-
tinuities in the plantation lines.
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
458

Also a method were proposed to treat the un-
aligned lines generated by the proposed algorithm.
These lines were considered and treated in this work
as noise. Based on empiric analysis the technique de-
veloped prove itself a promising strategy to solve the
problem. It suggest future works in order to analyze
effectively the denoising algorithm proposed and as-
sess quantitatively their effectiveness.
Another interesting byproduct of the proposed ap-
proach is the possibility of parallelization. Each win-
dow is independent from one another making it ideal
to be implemented as a divide and conquer approach.
Considering that in production the size of the imaged
fields can be really large leading to possibly gigabytes
of image data, the post flight processing can take con-
siderable time. By parallelizing the process, the UAV
companies doing agricultural survey are enabled to
deliver the final processing result in a fraction of the
usual time.
ACKNOWLEDGMENT
The authors would like to thank the company Sensix
Inovac¸
˜
oes em Drones Ltda (http://sensix.com.br) for
providing the images used in the tests.
REFERENCES
AUVSI (2013). The economic impact of unmanned aircraft
systems integration in the united states march. Eco-
nomic report, Association for Unmanned Vehicle Sys-
tems International, Washington DC,.
Ballard, D. H. (1981). Generalizing the hough transform to
detect arbitrary shapes. Pattern Recognition, 13(Issue
2):111–122. doi:10.1016/0031-3203(81)90009-1.
Blackmer, T. M. and Schepers, J. S. (1996). Aerial pho-
tography to detect nitrogen stress in corn. Journal of
Plant Physiology, 148:440–444. doi:10.1016/S0176-
1617(96)80277-X.
Garc
´
ıa-Santill
´
an, I., Guerrero, J. M., Montalvo, M., and
Pajares, G. (2017). Curved and straight crop row
detection by accumulation of green pixels from
images in maize fields. Precision Agriculture.
doi:10.1007/s11119-016-9494-1.
Hough, P. (1962). Method and Means for Recognizing
Complex Patterns. U.S. Patent 3.069.654.
Illingworth, J. and Kittler, J. (1988). A survey of the hough
transform. Computer Vision, Graphics, and Image
Processing, 44(Issue 1):87–116. doi:10.1016/S0734-
189X(88)80033-1.
Kataoka, T., Kaneko, T., Okamoto, H., and Hata, S.
(2003). Crop growth estimation system using ma-
chine vision. In Advanced Intelligent Mechatronics.
doi:10.1109/AIM.2003.1225492.
Lee, I.-K. (2000). Curve reconstruction from unorganized
points. Computer Aided Geometric Design, 17(Issue
2):161–177. doi:10.1016/S0167-8396(99)00044-8.
Leemans, V. and Destain, M.-F. (2006). Line cluster de-
tection using a variant of the hough transform for cul-
ture row localisation. Image and Video Computing,
24:541–550.
Ramesh, K. N., Omkar, N., Meenavathi, M. B., and Rekha,
V. (2016). Detection of row in agricultural crop im-
ages acquired by remore sensing from a uav. Inter-
national Journal of Graphics and Signal Processing,
11:25–31.
Ronghua, J. and Lijun, L. (2011). Crop-row detection algo-
rithm based on random hough transformation. Math-
ematical and Computer Modelling, 54:1016–1020.
Sankaran, S., Khot, L. R., et al. (2015). Low-
altitude, high-resolution aerial imaging systems
for row and field crop phenotyping: A re-
view. European Journal of Agronomy, 70:112–123.
doi:10.1016/j.eja.2015.07.004.
Søgaard, H. T. and Olsen, H. J. (2003). Determination of
crop rows by image analysis without segmentation.
Computers and Electronics in Agriculture, 38(Issue
2):141–158. doi:10.1016/S0168-1699(02)00140-0.
Turner, J., Kenkel, P., Holcomb, R. B., and Arnall, B.
(2016). Economic potential of unmanned aircraft in
agricultural and rural electric cooperatives. In 2016
Annual Meeting of Southern Agricultural Economics
Association, number 230047, page 18, San Antonio,
Texas.
Plantation Rows Identification by Means of Image Tiling and Hough Transform
459
