
Enhancing Correlation Filter based Trackers with Size Adaptivity and
Drift Prevention
Emre Tunali, Sinan
¨
Oz and Mustafa Eral
Software Design Department, ASELSAN Inc. Microelectronics, Guidance and Electro-Optics Division, Ankara, Turkey
Keywords:
Real-time Object Tracking, Size Adaptive Tracking, Track Drift Compensation, Track Initialization Error
Compensation, Joint Segmentation and Tracking.
Abstract:
To enhance correlation filter (CF) based trackers with size adaptivity and more robustness; we propose a new
strategy which integrates an external segmentation methodology with CF based trackers in a closed feedback
loop. Employing this strategy both enables object size disclosure during tracking; and automatic alteration of
track models and parameters online in non-disturbing manner, yielding better target localization. Obviously,
consolidation of CF based trackers with these properties introduces much more robustness against track center
drifts and relaxes widespread perfectly centralized track initialization assumption. In other words, even if
track window center is given with certain offset to center of target object at track initialization; proposed
methodology achieves target centralization by aligning tracker template center with target center smoothly in
time. Experimental results indicates that proposed algorithm increases performance of CF trackers in terms of
accuracy and robustness without disrupting their real-time processing capabilities.
1 INTRODUCTION
Visual object tracking is a fundamental task in com-
puter vision and has wide range of applications in-
cluding surveillance, motion analysis, activity recog-
nition, and human-computer interaction. Since target
can belong to any object class that is requiring further
analysis (i.e. vehicles on a road, pedestrians in the
street, planes in the air etc.); trackers should handle
large variety of appearance changes and that makes
visual object tracking a challenging task in realistic
scenarios. Moreover, many real-life application re-
quires real-time processing; hence challenges inclu-
ding partial occlusions, pose variations, background
clutter should be solved by using limited computatio-
nal load.
To handle these challenges, object tracking has
been studied for several decades; hence many sur-
veys and benchmarking efforts exist to identify ge-
neral trends, categorize various solutions and com-
pare their performances (Yilmaz et al., 2006; Smeul-
ders et al., 2014; Wu et al., 2013). Examining the
visual tracker literature, correlation filter (CF) based
tracking approaches are known to be one of the solu-
tion families that can achieve real-time tracking with
comparable performance to other popular algorithms.
However, this solution family suffers from two ge-
neral restrictions. Firstly, CF based visual tracking
algorithms keep track window size fixed through the
scenario even if the target size changes. Static track
window size not only restricts the adaption of tracker,
but also strips off size information from tracker out-
put which can be beneficial for many other tasks in-
cluding automated surveillance and motion-based re-
cognition. Secondly, since CF based trackers are not
aware of the target; their templates (filters) can be ea-
sily polluted by track drifts which can be either ob-
served during tracking, maneuvering targets, or intro-
duced at the beginning of scenario due to imperfect
track initializations. Most of the tracker algorithms
evade from drifts at the first frame by requiring per-
fect initialization, i.e. perfectly sized target bounding
box that is centralized at the target object center, from
human users. However, in many real-life tracking sy-
stems this requirement can not be fulfilled and trac-
ker might be initialized with a shifted track window.
Even in ideal conditions, CF based trackers proposed
in literature are expected to carry on tracking with the
same amount of shift with the initialization throug-
hout the scenario. In any case, to reduce undesired
bias in localization error (due to track window shifts)
and decrease track loss probability, these restrictions
should be addressed. To handle these issues, we pro-
pose a new methodology that integrates an external
472
Tunali, E., Oz, S. and Eral, M.
Enhancing Correlation Filter based Trackers with Size Adaptivity and Drift Prevention.
DOI: 10.5220/0006680404720480
In Proceedings of the 13th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2018) - Volume 5: VISAPP, pages
472-480
ISBN: 978-989-758-290-5
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Figure 1: Top Row: CF tracker (Bolme et al., 2010) using static track window size (blue) suffers from track drift. Bottom
Row: Enhanced tracker adapts to target size (red) and compensates drifts.
segmentation strategy with CF based trackers in a
closed feedback loop. Employing this strategy, any
CF based tracker becomes capable of revealing target
bounding box within the track window at each frame
and allows tracker to update its models, parameters
online in non-disturbing manner; yielding better tar-
get localization. Cooperation introduced in the pro-
posed strategy also proposes a remedy for erroneous
track initializations can be made by human users; by
aligning tracker template center with target center du-
ring tracking.
In summary, main contributions of this paper are
three-fold: (1) developing an external segmentation
method for revealing target bounding box information
at each frame, (2) integrating this information with
CF based tracking for size adaptivity and drift pre-
vention, and (3) relaxing the widespread perfect track
initialization assumption. It is important to emphasize
that all these contributions are achieved without vio-
lating real-time processing constraints. The remain-
der of the paper is organized as follows: We first re-
view related work in Section 2. In Section 3, the main
framework of our algorithm is introduced. Then, the
experimental results are presented in Section 4, and
followed by conclusions in Section 5.
2 RELATED WORK
CF based Visual Tracking. Correlation filters have
been investigated for three decades due to their at-
tractive properties (shift invariance, robustness to gra-
ceful degradation, distortion tolerance) and employed
in many applications. The basic idea behind learning
scheme of CFs is to learn filters that optimally map
input images to their ideal output. The ideal output
is a peak (or a value of one) at position of the target
and zeroes for all other locations in the image (Di-
rac Delta Function). Filters trained in this way, not
only produce high responses for targets but also le-
arn to suppress the response to common background
distracters. In other words, correlation filters are de-
signed to identify patterns that are consistent through
the video sequence. Hence, they are more tolerant
of common appearance changes than simple template
matching and produce more prominent peaks in the
target locations.
Minimum Average Correlation Energy (MACE)
filter (Mahalanobis et al., 1987) is one of the first ex-
amples of CFs that are trained for localization pur-
poses by using various target samples. This success-
ful matching scheme lead design of other “constrai-
ned” filters including Optimal Tradeoff Synthetic Dis-
criminant Function (OTSDF) (Refegier and Figue,
1991), Minimum Squared Error Synthetic Discrimi-
nant Function (MSESDF) (Kumar et al., 1992), and
the Minimum Noise and Correlation Energy (MI-
NACE) (Ravichandran and Casasent, 1992). Howe-
ver, applying constrains in filter learning, restricted
generalizations to appearance changes which is a
must for better localization. By relaxing constraints
in training “Unconstrained” MACE (UMACE) (Ma-
halanobis et al., 1994) achieved higher average re-
sponses; hence fitted better for tracking applications
due to improved generalization capability. “Optimi-
zed Correlation Output Filters” are the most recent
examples of the CF family. Unlike prior training met-
hods that recombine templates, these filters consider
image to image mapping that is performed during cor-
Enhancing Correlation Filter based Trackers with Size Adaptivity and Drift Prevention
473
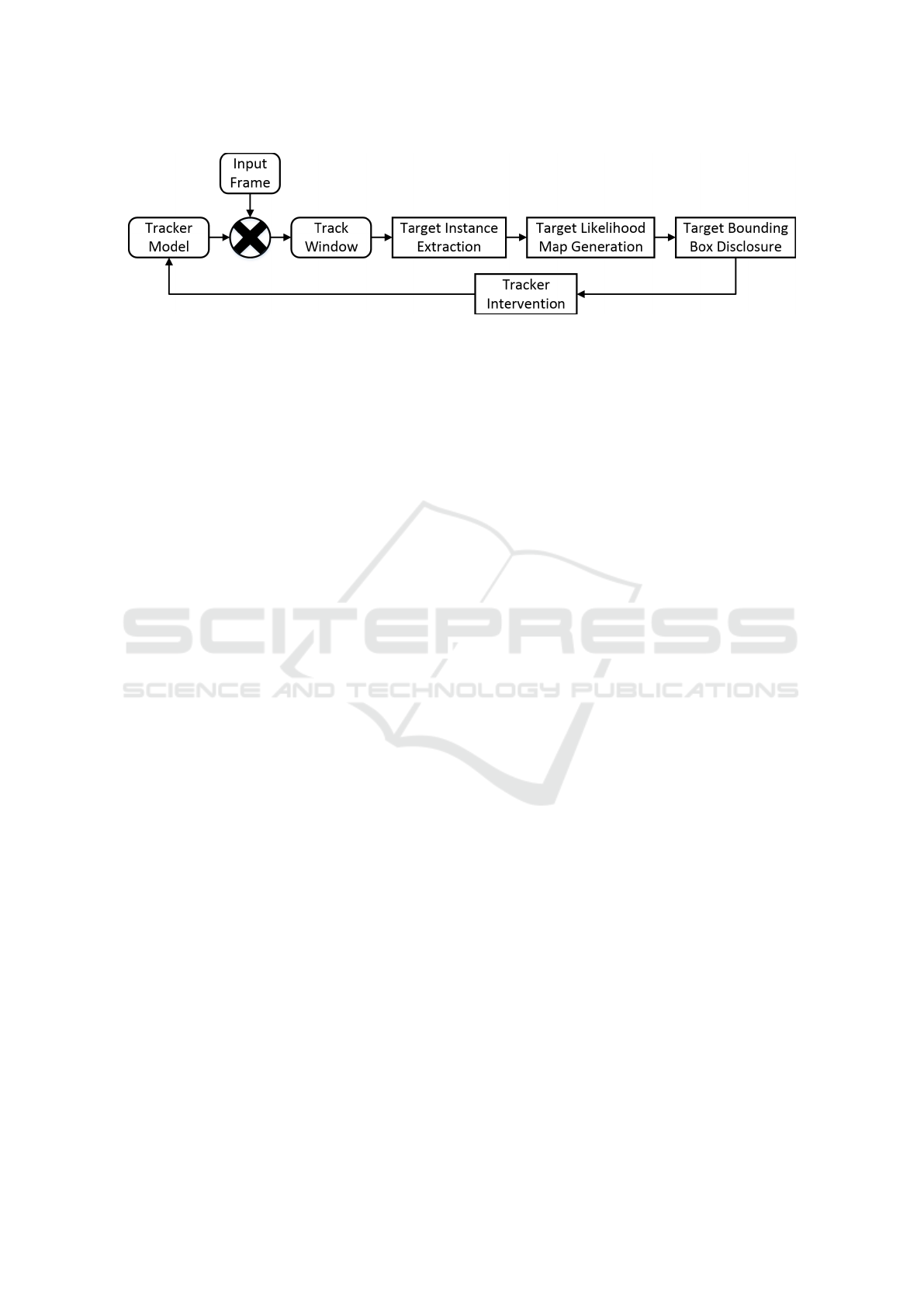
Figure 2: Overview of the proposed algorithm.
relation with synthetic outputs and inverts this map-
ping to produce ideal filters. Average of Synthetic
Exact Filter (ASEF) (Bolme et al., 2009a) and Mi-
nimum Output Sum of Squared Error (MOSSE) filter
(Bolme et al., 2010) are well-known examples of this
approach which results in complete control over cor-
relation plane rather than specifying a single peak as
is done in previous CFs, hence fits better for the visual
tracking purposes.
The superiority of CF based visual tracking comes
from not only their unique way of template (filter) le-
arning; but also their speed in matching. The simplest
form of matching utilizes following steps. Firstly,
the carefully designed template and query image is
cross-correlated. Then, correlation output is searched
for the most prominent peak by using a metric, such
as peak-to-sidelobe ratio (PSR) or peak-to-correlation
energy (PCE), which is designed to indicate likeli-
hood of the target presence. More prominent the peak,
target existence likelihood is higher at the indicated
location. If the match quality is above a threshold, lo-
cation of the prominent peak reveals location of the
target. If not, target is stated to be occluded or lost.
This matching scheme is employed by (Bolme et al.,
2009b; Bolme et al., 2010; Henriques et al., 2015)
and can be applied regardless of filter learning me-
chanism.
Joint Segmentation and Tracking. Image segmen-
tation is the task of assigning each pixel of an image to
a particular class label and has been extensively stu-
died (Donoser and Schmalstieg, 2014; Taylor, 2013)
since it is considered as a critical task for scene un-
derstanding. Benefiting from temporal information,
video segmentation extends this idea to video volu-
mes (Galasso et al., 2014). Hence, the main objective
turns into assigning consistent pixel labels throughout
scene that is being analyzed.
Tracking and segmentation can be considered as
related issues since a successful object/background
segmentation also means successful tracking. Si-
milarly, tracking also provides strong cues for ob-
ject/background segmentation especially in videos
that are taken by moving camera. Therefore, literature
includes examples of joint segmentation and tracking
(Wen et al., 2015). In these methods, segmentation
is mainly achieved for revealing exact contours of the
object of interest. However, this task can be consi-
dered as over complex for our objectives. Actually,
our goal is to give feedback to tracker for both enhan-
ced localization and adaptation of track window size
in real-time. Therefore, obtaining bounding box of
object would be sufficient rather than revealing fine
boundaries which is more appropriate for real-time
processing. (Stalder et al., 2012), benefits from “ob-
jectness” definition to give feedback to tracker for bet-
ter localization and drift prevention. Although size
adaptive tracking is achieved in (Stalder et al., 2012),
algorithm is limited to 5 fps and no effort is made for
generalizing solution to other trackers.
3 METHODOLOGY
Our method integrates CF based trackers with propo-
sed adaptive segmentation strategy with a feedback
loop to adjust tracker models and parameters in on-
line and non-disturbing manner. Procedure starts with
the resultant track window produced by any CF based
tracker. Then, target instance is obtained by executing
(Zhu et al., 2014) within this track window. Superim-
posing instances according to proposed adaptive le-
arning scheme, target likelihood map is obtained and
used for target bounding box disclosure. This boun-
ding box is not only reported as tracker output but also
used for aligning track window with tracker templates
(CFs) and adjusting other size dependent tracker para-
meters. Although tracker intervention has numerous
merits, non-smooth changes of templates or track pa-
rameters may abruptly decrease track quality. Hence,
adjustment pace is arranged in order not to disturb
own flow of the tracker. General overview of algo-
rithm flow is illustrated in Fig. 2.
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
474

3.1 Target Instance Extraction
Proposed solution benefits from two simple yet ef-
fective priors: (1) Track window always contains an
object of interest; (2) Target object is more frequently
visible than background. Actually, both of these as-
sumptions are very natural for numerous tracking sce-
narios due to general tendency that tracker is initiated
to observe specific objects in varying conditions.
To achieve target/background segmentation inde-
pendent of object models, visual saliency exploration
is one of the most commonly used strategy in the lite-
rature. Although a recent visual saliency benchmark
(Borji et al., 2015) reveals various solutions, we em-
ployed RBD (Zhu et al., 2014) since it has unique be-
nefits that are fitting better for our task. First of all,
apart form many conventional methods, RBD does
not depend only on contrast difference; it also bene-
fits from the geometrical interpretation of the given
image by examining boundary connectivity. This me-
tric is based on the statement “object regions are much
less connected to image boundaries than background
ones” which fits perfectly for our application since
the proposed tracker aims centralization of target re-
sulting in decreased probability of target contact with
track window boundaries. Secondly, usage of SLIC
super pixels, (Achanta et al., 2012), in calculation of
saliency map results in better fits for target boundaries
leading to better target bounding box estimation. Fi-
nally, according to (Borji et al., 2015) and experimen-
tal results, it is revealed that RBD can achieve real-
time processing constraints with less computational
power requirement than other methods with compa-
rable performance. Therefore, at each frame we em-
ployed RBD in track window for achieving target in-
stances as saliency maps independent from temporal
information. Each instance is treated as new infor-
mation about target and superimposed in an adaptive
manner for target likelihood map generation.
3.2 Target Likelihood Generation via
Instance Quality Assessment
In order to reveal target likelihood, all extracted tar-
get instances should be examined. However, effect of
each instance on likelihood map should differ since
instances cannot represent the common properties of
the target with the same quality or they are aged over
time. For this reason, target likelihood is generated
by following 1
st
order IIR filter structure with adap-
tive learning rate λ[n]. By applying Eqn.1, instan-
ces (S
instance
[n]) are superimposed in form of saliency
maps to disclose target likelihood (S
target
[n]) at each
frame (n).
S
target
[n] = (1−λ[n])·S
target
[n−1]+λ[n]·S
instance
[n] .
(1)
Learning rate is directly proportional to quality of
instances which is measured based on two properties:
distinctiveness and consistency. Distinctiveness me-
tric is designed to measure distribution of saliency
between foreground and background pixels. In other
words, higher saliency values in target pixels rather
than background indicates clear representation of tar-
get instance which should be benefited in higher ra-
tes. Distinctiveness (d
s
(t)), is calculated as in Eqn.2
where target instance is binarized and foreground is
classified as the pixels having saliency values grea-
ter than the binarization threshold achieved by Otsu’s
(Otsu, 1979).
d
s
[n] =
∑
x∈Foreground
S
instance
(x)
∑
∀x
S
instance
(x)
. (2)
One should note that distinctiveness metric bene-
fits from target instance only; hence does not include
any temporal information. However, consistency of
target instances inherently shows the absence of ab-
rupt changes indicating high quality of instances. In
this manner, consistency score c
s
[n], is calculated as
the maximum value of the normalized cross correla-
tion score between target instance and target likeli-
hood. Since high consistency is signature of confi-
ding target, consistency metric also determines when
tracker should be intervened.
Using these metrics, adaptive learning rate λ[n]
is calculated as in the Eqn.3 at each frame where α
is maximum learning rate constant, β is penalization
constant which is defined to prevent mislearning of
target model in the presence of inconsistent target in-
stances and C
thres
is the consistency threshold.
λ[n] =
(
α · d
s
[n] · c
s
[n], c
s
[n] > C
thres
β · α · d
s
[n] · c
s
[n], c
s
[n] ≤ C
thres
. (3)
3.3 Target Bounding Box Disclosure
Although likelihood for intended target pixels is
known to be high, all pixels having high likeli-
hood do not necessarily belong to target since the
track window may also contain other objects or their
parts in the vicinity of intended target. In other
words, after binarization, target pixels should be se-
lected among the foreground pixels. Intuitively spea-
king, target bounding box should contain most sa-
lient region with minimum distance to the center.
Target Bounding Box(T BB) is disclosed by revealing
the Bounding Box(BB) of the connected component
Enhancing Correlation Filter based Trackers with Size Adaptivity and Drift Prevention
475
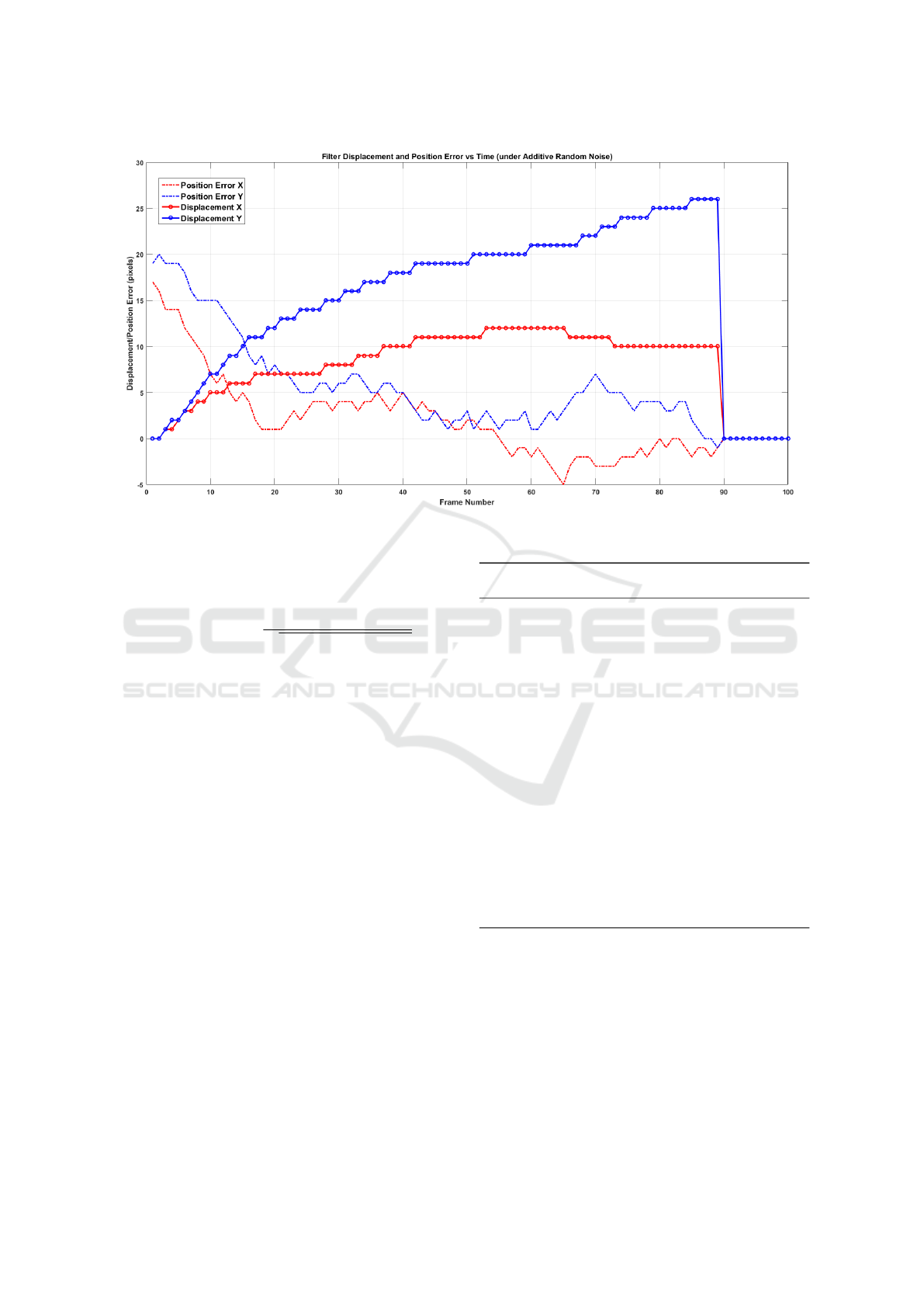
Figure 3: Exemplary filter shift pace to cover [17,19] pixel distance. Random noise in range [-2,2] is introduced at each frame
to simulate localization error of tracker.
maximizing the targetness cost given by Eqn.4 as pro-
posed in (Tunali and
¨
Oz, 2014).
T BB = BB
argmax
C
i
∑
x∈C
i
S
target
[n](x)
q
(x
i
− x
c
)
2
+ (y
i
− y
c
)
2
,
(4)
Note that, C
i
is the 2D label matrix with values 1
for i
th
connected component and 0 otherwise, (x
i
,y
i
),
(x
c
,y
c
) are centers of each connected components and
track window.
3.4 Tracker Intervention
In CF based trackers, filters (templates) are learned
being unaware of the target. Therefore, when track
is initiated imperfectly, unaligned with the target, or
tracker faces with drifts during the process, generated
filters become misplaced and that makes track drifts
permanent. To achieve drift prevention, filters should
be shifted back to their ideal locations without poiso-
ning their history and nature. By aligning filter center
with target bounding box obtained in Sec.3.3, CF fil-
ters achieves awareness on shape of target object.
Even though energy of the filter can be kept same
by applying circular shifts, shifted filter would in-
clude some artificial responses that can only be re-
covered through combining with natural samples in
time. In this sense, applying shifts in large amounts or
repeatedly in consecutive frames would poison natu-
rality of filter yielding abrupt decreases in track qua-
lity. On the contrary, limiting shifts too harshly
Algorithm 1: Target Center and Correlation Filter (Tem-
plate) Alignment Procedure.
INPUT:position error: ~e[n] ∈ ℜ
2
, step size: ~µ[n] ∈
ℜ
2
, Template: H[n](u,v) ∈ ℜ
NxM
, consistency score:
c
s
[n] ∈ ℜ
1: while (c
s
[n] > C
thres
) do
2: ~v[n] ←~µ[n] ·~e[n]
3: ~a[n] ←~v[n]−~v[n − 1]
4: if (~a[n] > a
thres
) then ~v[n] ←~v[n − 1] + a
thres
5: if (~v[n] > v
thres
) then ~v[n] ← v
thres
6: ∆~x
acc
[n] ← ∆~x
acc
[n − 1] +~v[n]
7: ∆~x
integer
[n] ← f ix(∆~x
acc
[n])
8: if (∆~x
integer
[n] > v
thres
) then ∆~x
integer
[n] ←
v
thres
9: ∆~x
acc
[n] ← ∆~x
acc
[n] − ∆~x
integer
[n]
10: H[n](u,v) = H[n](u,v). ∗
exp(− j2π · [u/N,v/M] ·~x
integer
[n])
11: end while
12: return H[n](u,v)
would reduce convergence rate in filter alignment. To
achieve proper shifting pace; adaptive step sizes, pro-
portional to target likelihood learning rate λ[n], are
utilized while covering distance between current and
ideal filter position. Maximum velocity or accele-
ration thresholds are used for allowing consecutive
shifts in minimum N frames. Filter alignment pro-
cess is summarized in Algorithm 1 where ~v[n], ~a[n]
are velocity and acceleration; ∆~x
integer
[n] is integer
part of accumulated desired filter shift (∆~x
acc
[n]) and
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
476

Table 1: Real-time processing constraints can be satisfied
up to 128x128 target sizes.
Track Window Size 32x32 64x64 128x128 256x256
Processing Time (ms) 2.272 10.129 35.961 151.056
represents amount of filter shift applied at each frame.
Online parameter tuning is another interaction
with tracker. In many CF based tracker, size depen-
dent parameters are set at the track initialization and
kept fixed since target size is not known. Although
size dependent parameters can vary from different
trackers, our method allows their online adjustments
resulting in better adaptability and increased capabi-
lity of rejection of similar targets in the vicinity. For
(Bolme et al., 2010), density distribution of prepro-
cessing window and size of PSR window are such pa-
rameters. Unified effect of online parameter update
together with filter alignment are given in Sec.4.
4 EXPERIMENTAL RESULTS
Testing our solution in the presence of scale chan-
ges, track drifts and erroneous track initialization is
crucial since these issues are primarily addressed in
this paper. Therefore, we evaluated performance on
scenarios from three different datasets. From Vivid
(Collins et al., 2005) egtest01-02-03; from Aircraft
tracking (Mian, 2008) small1, occlusion1; and from
CVPR2013 benchmark (Wu et al., 2013) Sylvester,
Walking, Walking2 are selected. These datasets fits
for testing amendments of drift prevention and size
adaptivity since they are dominated by targets having
maneuvers, in-plane and out-of plane rotations, scale
changes and deformations that generally causes track
drifts and loses. To achieve more solid results, num-
ber of scenarios obtained from egtest01-02-03 is in-
creased to 10 in total (5, 3, and 2 respectively) by
tracking auxiliary targets,whose ground truths are ma-
nually labeled, in addition to main targets given in
(Collins et al., 2005).
During the experiments main attention is paid on
quantifying the performance improvement by compa-
ring base trackers with their enhanced versions. For
evaluating performance of trackers, methodology and
metrics proposed in (Wu et al., 2013) is followed.
Hence, success and precision plots are generated to
reveal track success rates (percentage of frames in
which tracking is maintained) by measuring two dif-
ferent error types; target bounding box overlap and
centralization errors. To be more precise, success
plots uses a common overlap score which is defined
as S =
|
r
t
∩r
g
|
|
r
t
∪r
g
|
where r
t
is output target bounding box
and r
g
ground truth bounding box. Although compa-
ring overlap score with a fixed threshold is enough to
obtain track success rate, success plot is generated by
sweeping this threshold from 0 to 1 for better charac-
terization. In precision plot, track success rate is dis-
closed based on center location error (CLE) that me-
asures euclidean distance between ground truth and
output track window centers. Similar to success plot,
precision plot is also generated by comparing distance
with a threshold ranging from 0 to 50. In order to rank
trackers in precision plot, performances at CLE 15 is
used while 0.5 is selected for success plot. To investi-
gate whether the proposed scheme introduces robust-
ness to initializations, temporal robustness evaluation
(TRE) and spatial robustness evaluation (SRE) are
carried out together with one-pass evaluation (OPE)
as is proposed in (Wu et al., 2013). OPE is the con-
ventional scheme in which initialization is achieved
perfectly at the first frame and tracker runs through
whole scenario. In TRE analysis, scenario is divi-
ded into 20 segments and tracks are perfectly initi-
alized at the first frame of these segments. In SRE
analysis, erroneous track initializations are simulated
by giving 8 spatial shifts including 4 center shifts and
4 corner shifts, and 4 scale variations. Spatial shifts
are given in 10% of target size while scale ratios are
0.8, 0.9, 1.1 and 1.2 to the ground truth. For the pa-
rameter setting of the base trackers, we set them as
default. Target instance extraction requires single pa-
rameter that is slic super pixel area and set to 65. For
target likelihood map generation maximum learning
rate constant α = 0.05, penalization constant β = 0.3
and consistency threshold = 0.85 are used. For filter
alignment maximum acceleration (a
thres
) and velocity
(v
thres
) thresholds are set to 0.2, and 2 while step size
µ[n] is set to 0.3λ[n].
Figure 4 illustrates success and precision plots of
6 base trackers together with their enhanced versions
while Table 2 quantitatively compares base trackers
directly with their enhanced versions to disclose the
impact of proposed solution on each of the trackers
and the effect on the average. According to Table 2,
proposed solution boosts performance of almost each
tracker at each performance aspect. Achieved im-
provement on CLE and overlap metrics indicates that
proposed solution is successful at both centralization
and size disclosure. Smallest performance increase is
achieved in TRE (overlap 6.2%, CLE 5.1) since base
trackers also cannot achieve high track success rates
due to low contrast and frequent occlusions. Obvi-
ously, boost in OPE (overlap 10.2%, CLE 12.6) is
much better than TRE since base trackers have higher
track success rates which provides proposed solution
additional time for better target learning. SRE is the
Enhancing Correlation Filter based Trackers with Size Adaptivity and Drift Prevention
477
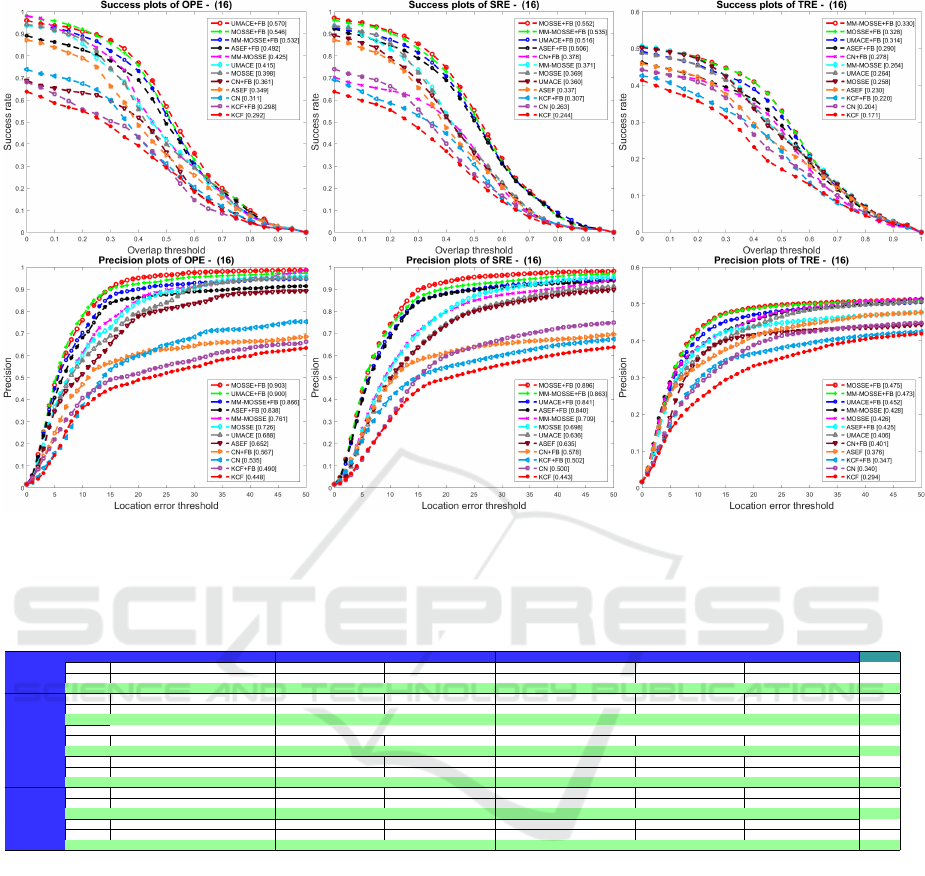
Figure 4: Success and precision plots for all base tracker and enhanced versions on 16 different scanarios from Vivid (Collins
et al., 2005), Aircraft tracking (Mian, 2008) and CVPR2013 benchmark (Collins et al., 2005) datasets. Performance scores
are shown in the legend (best viewed in color).
Table 2: Performance gains obtained in OPE, SRE and TRE analysis by proposed solution for each tracker. Highest and
second highest gains are represented by red and blue.
All Scenarios MM-Mosse (Tanisik and Gundogdu, 2015) Mosse (Bolme et al., 2010) ASEF (Bolme et al., 2009a) UMACE (Mahalanobis et al., 1994) CN (Danelljan et al., 2014) KCF (Henriques et al., 2015) Average
Base 0.425 0.398 0.349 0.415 0.311 0.292 0.365
Base+FB 0532 0.546 0.492 0.570 0.361 0.298 0.467OPE-overlap
Gain 0.107 0.148 0.143 0.155 0.050 0.006 0.102
Base 0.371 0.369 0.337 0.360 0.263 0.244 0.324
Base+FB 0.535 0.552 0.506 0.516 0.378 0.307 0.466SRE-overlap
Gain 0.164 0.183 0.169 0.156 0.115 0.063 0.142
Base 0.264 0.258 0.230 0.264 0.204 0.171 0.232
Base+FB 0.330 0.328 0.290 0.314 0.278 0.220 0.293TRE-overlap
Gain 0.066 0.070 0.060 0.050 0.074 0.049 0.062
Base 0.761 0.726 0.652 0.688 0.535 0.448 0.635
Base+FB 0.866 0.903 0.838 0.900 0.567 0.490 0.761OPE-distance
Gain 0.105 0.177 0.186 0.212 0.032 0.042 0.126
Base 0.709 0.698 0.635 0.636 0.500 0.443 0.604
Base+FB 0.863 0.896 0.840 0.841 0.578 0.502 0.753SRE-distance
Gain 0.154 0.198 0.205 0.205 0.078 0.059 0.149
Base 0.428 0.426 0.376 0.406 0.340 0.294 0.378
Base+FB 0.473 0.475 0.425 0.452 0.401 0.347 0.429TRE-distance
Gain 0.045 0.049 0.049 0.046 0.061 0.053 0.051
most significant analysis type for proposed solution
since it directly evaluates robustness gained against
erroneous initialization and track drifts, which are the
major contributions of the paper. In addition to signi-
ficant average SRE gains (14.2%, 14.9%), comparing
OPE and SRE scores also reveals impact of proposed
solution. To be more precise, for any tracker, SRE
scores are expected to be lower than OPE since per-
fect initialization is achieved in OPE while SRE ex-
poses perturbed initializations. Examining Table 2 re-
veals that perturbed initializations yields less perfor-
mance decrease in trackers enhanced with feedback.
Obviously, these improvements requires computatio-
nal load proportional to track window size. Table 1,
indicates required average processing times for vari-
ous target sizes. Results are obtained from a single
core of an Intel i7-2670QM CPU @2.20 GHz proces-
sor with an unoptimized MATLAB code.
5 CONCLUSIONS
We presented a novel adaptive segmentation and feed-
back mechanism to enhance any CF based tracker
with target size output and more robustness. Key to
the achieved performance boost is benefiting from tar-
get bounding box to align target and template (filter)
centers by applying gradual shifts in a non-disturbing
manner. Experiments revealed that proposed solution
makes CF based trackers more practical in real-life
scenarios by tolerating erroneous track initializations.
It would be interesting to investigate effect of rota-
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
478
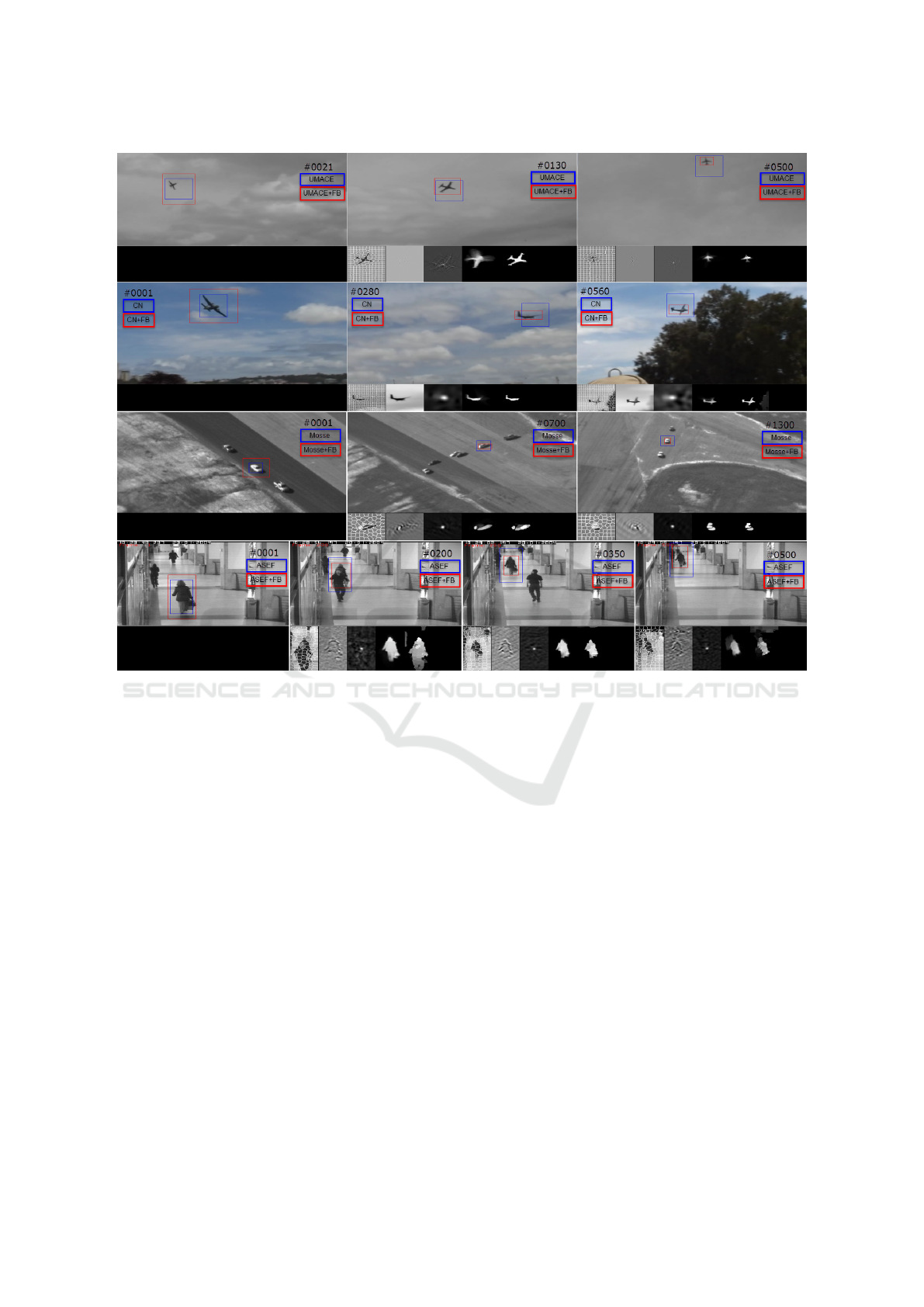
Figure 5: Exemplary results of performance boosts. Base and boosted versions are illustrated in blue and red. Informa-
tion rows on each subfigure includes Slic superpixels, correlation filter, correlation output, target likelihood map and target
instance, respectively.
ting and scaling filters to achieve even more robust-
ness and extend our experiments to other challenging
datasets.
REFERENCES
Achanta, R., Shaji, A., Smith, K., Lucchi, A., Fua, P., and
Ssstrunk, S. (2012). Slic superpixels compared to
state-of-the-art superpixel methods. IEEE Transacti-
ons on Pattern Analysis and Machine Intelligence,
34(11):2274–2282.
Bolme, D. S., Beveridge, J. R., Draper, B. A., and Lui, Y. M.
(2010). Visual object tracking using adaptive correla-
tion filters. In Computer Vision and Pattern Recogni-
tion (CVPR), 2010 IEEE Conference on, pages 2544–
2550. IEEE.
Bolme, D. S., Draper, B. A., and Beveridge, J. R. (2009a).
Average of synthetic exact filters. In Computer Vision
and Pattern Recognition, 2009. CVPR 2009. IEEE
Conference on, pages 2105–2112. IEEE.
Bolme, D. S., Lui, Y. M., Draper, B. A., and Beveridge, J. R.
(2009b). Simple real-time human detection using a
single correlation filter. In Performance Evaluation
of Tracking and Surveillance (PETS-Winter), 2009
Twelfth IEEE International Workshop on, pages 1–8.
IEEE.
Borji, A., Cheng, M.-M., Jiang, H., and Li, J. (2015). Sa-
lient object detection: A benchmark. Image Proces-
sing, IEEE Transactions on, 24(12):5706–5722.
Collins, R., Zhou, X., and Teh, S. K. (2005). An open
source tracking testbed and evaluation web site. In
IEEE International Workshop on Performance Eva-
luation of Tracking and Surveillance, volume 2,
page 35.
Danelljan, M., Khan, F., Felsberg, M., and Weijer, J. (2014).
Adaptive color attributes for real-time visual tracking.
In Proceedings of the IEEE Conference on Computer
Vision and Pattern Recognition, pages 1090–1097.
Donoser, M. and Schmalstieg, D. (2014). Discrete-
continuous gradient orientation estimation for faster
image segmentation. In Proceedings of the IEEE Con-
ference on Computer Vision and Pattern Recognition,
pages 3158–3165.
Galasso, F., Keuper, M., Brox, T., and Schiele, B. (2014).
Spectral graph reduction for efficient image and strea-
ming video segmentation. In Proceedings of the IEEE
Conference on Computer Vision and Pattern Recogni-
tion, pages 49–56.
Enhancing Correlation Filter based Trackers with Size Adaptivity and Drift Prevention
479

Henriques, J. F., Caseiro, R., Martins, P., and Batista, J.
(2015). High-speed tracking with kernelized corre-
lation filters. Pattern Analysis and Machine Intelli-
gence, IEEE Transactions on, 37(3):583–596.
Kumar, B. V., Mahalanobis, A., Song, S., Sims, S. R. F.,
and Epperson, J. F. (1992). Minimum squared error
synthetic discriminant functions. Optical Engineer-
ing, 31(5):915–922.
Mahalanobis, A., Kumar, B., and Casasent, D. (1987). Mi-
nimum average correlation energy filters. Applied Op-
tics, 26(17):3633–3640.
Mahalanobis, A., Vijaya Kumar, B., Song, S., Sims, S., and
Epperson, J. (1994). Unconstrained correlation filters.
Applied Optics, 33(17):3751–3759.
Mian, A. S. (2008). Realtime visual tracking of aircrafts. In
Digital Image Computing: Techniques and Applicati-
ons (DICTA), 2008, pages 351–356. IEEE.
Otsu, N. (1979). A threshold selection method from gray-
level histogram. IEEE Transactions on System Man
Cybernetics, SMC-9.
Ravichandran, G. and Casasent, D. (1992). Minimum noise
and correlation energy optical correlation filter. App-
lied Optics, 31(11):1823–1833.
Refegier, P. and Figue, J. (1991). Optimal trade-off filters
for pattern recognition and their comparison with the
wiener approach. Optical Computing and Processing,
1(3):245–266.
Smeulders, A. W., Chu, D. M., Cucchiara, R., Calder-
ara, S., Dehghan, A., and Shah, M. (2014). Visual
tracking: An experimental survey. Pattern Analy-
sis and Machine Intelligence, IEEE Transactions on,
36(7):1442–1468.
Stalder, S., Grabner, H., and Van Gool, L. J. (2012). Dyn-
amic objectness for adaptive tracking. In ACCV (3),
pages 43–56.
Tanisik, G. and Gundogdu, E. (2015). Multiple model adap-
tive visual tracking with correlation filters. In Image
Processing (ICIP), 2015 IEEE International Confe-
rence on, pages 661–665. IEEE.
Taylor, C. (2013). Towards fast and accurate segmentation.
In Proceedings of the IEEE Conference on Computer
Vision and Pattern Recognition, pages 1916–1922.
Tunali, E. and
¨
Oz, S. (2014). A real-time, semi-automatic
method for discriminant target initialization in ther-
mal imagery. In Image Processing (ICIP), 2014 IEEE
International Conference on, pages 5117–5121.
Wen, L., Du, D., Lei, Z., Li, S. Z., and Yang, M.-H. (2015).
Jots: Joint online tracking and segmentation. In Pro-
ceedings of the IEEE Conference on Computer Vision
and Pattern Recognition, pages 2226–2234.
Wu, Y., Lim, J., and Yang, M.-H. (2013). Online object
tracking: A benchmark. In The IEEE Conference on
Computer Vision and Pattern Recognition (CVPR).
Yilmaz, A., Javed, O., and Shah, M. (2006). Object
tracking: A survey. Acm computing surveys (CSUR),
38(4):13.
Zhu, W., Liang, S., Wei, Y., and Sun, J. (2014). Saliency op-
timization from robust background detection. In The
IEEE Conference on Computer Vision and Pattern Re-
cognition (CVPR).
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
480
