
Super-Resolution 3D Reconstruction from Multiple Cameras
Tomoaki Nonome, Fumihiko Sakaue and Jun Sato
Department of Computer Science and Engineering, Nagoya Institute of Technology,
Gokiso, Showa, Nagoya 466-8555, Japan
Keywords:
Super-Resolution, Multiple Cameras, 3D Reconstruction, High Resolution.
Abstract:
In this paper, we propose a novel method for reconstructing high resolution 3D structure and texture of the
scene. In the image processing, it is known that image super-resolution is possible from multiple low resolution
images. In this paper, we extend the image super-resolution into 3D space, and show that it is possible to
recover high r esolution 3D structure and high resolution texture of the scene from low resolution images taken
at different viewpoints. The experimental results from real and synthetic images show the efficiency of the
proposed method.
1 INTRODUCTION
Recovering struc ture of the scene is one of the very
important objectives in computer vision, and many ef-
ficient reconstruction methods have been proposed in
the past research.
The early studies in this field revealed what kind
of constraints exist in multiple images, and what
kind of information can be obtained from these ima-
ges (Hartley and Zisserman, 2000; Faugeras et al.,
2004). For this objective, two-view, three-view
and multi-view geometry have been studied extensi-
vely (Longuet-Higgins, 1 981; Shashua and Werman,
1995; Hartley and Zisserman, 2000; Faugeras et al.,
2004). The bundle adjustment (Triggs et al., 1999)
has been combined with these theoretical advances,
and the sparse 3D reconstruction has been achieved.
More rece ntly, multiple images are used for reco-
vering large scale structures of the scene efficiently.
One of the mile stone research in this field was pre-
sented by Agarwal et al. (Agarwal et al., 2011), who
showed that whole buildings and cities ca n be re con-
structed autom atically from vast amount of images.
Furthermore, the accuracy of 3D reconstruction of
large scale scenes has been im proved drastically in
recent years (Galliani e t al., 2015; Schonbe rger et al.,
2016). However, these existing methods use multi-
ple images mainly for reducing outliers and noises
in reconstructed 3D structures. That is, the multiple
images have been used for improving the stability of
3D reconstruction. On the contrary, we in this paper
propose a method which uses multiple images for re-
covering finer 3D structu res of the scene.
In the image processing research field, the super-
resolution of 2D images has been studies extensively.
The existing methods in this field can be classified
into two groups. The first group of methods are based
on statistical priors which are obtained from advanced
learning (Glasner et al., 200 9; K im et al., 2016; Ledig
et al., 2016). Th ese method s can obtain a high reso-
lution image ju st from a single low resolution ima ge,
since the statistical prio rs can compensate th e lack of
high frequency ter m in the image. However, these
methods are heavily depend on the priors, and if the
priors do no t agree with the input images, they out-
put wrong high r esolution images. The seco nd group
of methods are based on mu ltiple observations (Har-
die et al., 1997; Tom et al., 19 94). Altho ugh these
methods needs multiple images, they can recover high
resolution images accurately without any wrong infe-
rence. In this paper, we prop ose a new method for re-
covering fine 3D structures of the scene by extending
the image super-resolution based on multiple images.
In our method, we recover fine 3D structures of
the scene, whose resolu tions are much higher than the
input image resolutions. For this objective, we reco-
ver th e high resolution structures of the scene directly
from the image intensity of low resolution image s.
Thus point correspond ences among multiple images
are not required in our method. Instead, we recover
the high resolution texture of the scene as well a s the
high resolution 3D structure of the scene. By esti-
mating the high resolution textures and the high reso-
lution 3D structures simultaneously, we can recover
Nonome, T., Sakaue, F. and Sato, J.
Super-Resolution 3D Reconstruction from Multiple Cameras.
DOI: 10.5220/0006718304810486
In Proceedings of the 13th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2018) - Volume 5: VISAPP, pages
481-486
ISBN: 978-989-758-290-5
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
481

۷
۷
ଵ
܅
Figure 1: Image super-resolution from multiple images. By
obtaining multiple image, I
0
and I
1
, wi th different sam-
pling phases, a high resolution image W can be recovered
by combining these images.
fine structure of the scene from low resolu tion ima-
ges. As as result, w e can recover fine 3D structures,
which could not be recovered by the existing multiple
view reconstruction methods.
2 IMAGE SUPER-RESOLUTION
Before considering the super-resolution 3D recon-
struction, we revise the standard image super-
resolution from multiple images. In the ima ge super-
resolution, multiple images observed at different vie-
wpoints are combined together, so that these mu lti-
ple observations compensate the lack of observation
in single image as shown in Fig. 1. The maximum a
posteriori probability (MAP) estimation is often used
for obtaining a high resolution image W fr om multi-
ple low resolution images I
i
(i = 1, ··· , N) under the
existence of image noise as follows:
ˆ
W = argmin
W
N
∑
i=1
kI
i
− A
i
Wk
2
+ αkL Wk
2
(1)
The first term in Eq.(1 ) is a data term, and A
i
deno-
tes a matrix which represents down sampling in ith
image, i.e. a down sampling at ith viewpoint. The
second term is a r egu la rization term, and L denotes
the Laplacian filter for smoothness constraints. k · k
2
denotes the L
2
norm, and α de notes the magnitude of
the regularization term.
The image super-resolution assumes that the ob-
jective surface is planar, and the difference of sam-
pling phase in each image is constant. Thus, if the
objective surface is not planar, the standard image
super-resolution fails. On the contrary, we in this pa-
per consider non-planar objects, and propose a met-
hod for reconstructing high resolution 3D su rfaces as
well as their high re solution textures. We call it super-
resolution 3D reconstru ction.
(a) 3D scene
⋯
(b) observed images
⋯
(c) reprojection images
Figure 2: observed images and reprojection images.
3 SUPER-RESOLUTION 3D
RECONSTRUCTION
Our super-resolution 3D re c onstruction is a c hieved by
estimating hig h resolution 3D structures and high re-
solution textures simultane ously by minimizing a cost
functions defined by low resolution im ages observed
at multiple viewpoints.
Let us consider a 3D surface whose high resolu-
tion structure and texture are D and W respectively.
Suppose the 3D surface is p rojected into N cameras
C
i
(i = 1, · · · , N), and N low resolution images I
i
(i =
1, ··· , N) are observed as shown in Fig. 2. Then, these
projections can be described by projection functions
P
i
(i = 1, ·· · , N) as follows:
I
i
= P
i
(D, W) (2)
The projection functions P
i
represent not only the re-
lative position and orientation among N cameras, but
also the down sampling in the se cameras. In this rese-
arch, we assume that the cameras are calibrated , and
the projection functions P
i
are known. Also, we as-
sume the ambient light is constan t in all th e orienta-
tions around the 3D surface, and the local orientation
of the surface does not affect the intensity in images.
Then, the objective of our method is to estimate
the hig h resolution structure D and the high resolution
texture W simultaneously, which best fit low resolu-
tion images I
i
(i = 1, · ·· , N) observed by N came ras
as fo llows:
{
ˆ
D,
ˆ
W} = argmin
D,W
N
∑
i=1
kI
i
− P
i
(D, W)k
2
(3)
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
482

In the real scenes, we can assume that the struc-
ture and the texture of the 3D surface does not change
drastically except the boundary of objects and the
boundary of textures.Thus, we can make the estima -
tion more stable by adding the smoothness constraints
S (·) on structure an d texture as follows:
{
ˆ
D,
ˆ
W} = argmin
D,W
N
∑
i=1
kI
i
− P
i
(D, W)k
2
+S (D) + S (W) (4)
Unfortu nately, the simultaneous estimation of
high resolution structures and textures described in
Eq.(4) is very difficult and unstable, since we have
to minimize the cost function in very high dimensio-
nal sp ace. In the n ext section, we describe a p ractical
method for estimating high resolution structures and
high r esolution textures based on Eq.(4).
4 PRACTICAL
SUPER-RESOLUTION 3D
RECONSTRUCTION
Suppose we have N cameras, and each of which
obtains a low resolution image I
i
= [I
1
, ··· , I
P
]
⊤
(i =
1, ··· , N), where P de notes the number of pixels in
a low resolution image. Then, we consider one of
these camera s as a basis camera, and its came ra coor-
dinates a re considered as the basis 3D coordinates of
the scene. T hus, the high resolution 3D structure of
the scene is represented by a high resolution depth
image D = [D
1
, ··· , D
Q
]
⊤
observed at the basis ca-
mera, where Q denotes the number of pixels in a high
resolution image. Also, the high resolution texture of
the scene is represented by a high resolution inten-
sity image W = [W
1
, ··· , W
Q
]
⊤
observed at the ba sis
camera. Naturally, we assume P ≤ Q. Then, our ob-
jective is to estimate D and W from I
i
.
Since the simultaneous estimation of high resolu-
tion structures and textures shown in Eq.(4) is difficult
and unstable, we in this paper estima te high resolution
structures and high resolution textures alternately by
iterating th e following two steps.
4.1 Estimation of High Resolution
Textures
We fist estimate a high resolution texture W given an
estimated hig h resolutio n structure D.
Suppose we have a high resolution structure D =
[D
1
, ··· , D
Q
]
⊤
. Then, the low resolution images I
i
(i = 1, · ·· , N) observed by N cameras can be descri-
bed by using the high resolution texture W as follows:
I
i
= A
i
(D)W (5)
where, A
i
(D) denotes a P × Q matrix, wh ic h repre-
sents a projec tion from the high resolution texture at
the basis camera to the low resolution ima ge at th e ith
camera given a high resolution structure D. Thus, the
high resolution texture W can be estimated from low
resolution images I
i
observed at N cameras by solving
the following minimization problem:
ˆ
W(D) = arg min
W
N
∑
i=1
kI
i
− A
i
(D)Wk
2
+ αkLWk
2
(6)
where, L denotes a matrix for computing the La p-
lacian of W, and k · k
2
denotes the L
2
norm. Thus
the second term represents the smoothness constraints
S (W) on high resolution textures, and α is its weight.
From Eq.(6), the high resolution texture W can be es-
timated given a high re solution structur e D.
Note, the estimation of W in Eq.(6) is a linear pro-
blem, and thus W can be estimated linearly.
4.2 Estimation of High Resolution
Structures
We next estimate a high resolution structure D given
an estimated high resolution texture W.
Given a high resolution texture W =
[W
1
, ··· , W
Q
]
⊤
, the low re solution camera ima-
ges I
i
can be described by Eq.(5) as before. Then,
the high resolution structure D can be estimated from
low resolution images I
i
observed at N cameras as
follows:
ˆ
D(W) = argmin
D
N
∑
i=1
kI
i
− A
i
(D)Wk
2
+ βkLDk
2
(7)
The second term represents the smooth ness con-
straints S (D) on high resolution structures, and β is
its weight. α and β are chosen empirically in our ex-
periments.
By iteratin g Eq.(6) and Eq.(7) alternately, we can
estimate the high resolution structure D and texture
W of 3D surfaces. In this estimation, we also use co-
arse to fine technique to stabilize the super resolution
estimation. That is, we gradually increase the scale
of estimated texture and stru c ture during the iteration.
Since we need initial values o f 3D structure and 2D
texture in our estimation, we used a flat surface as the
initial structure and used the low resolution image of
the basis camera as the initial texture. By using the
proposed method, th e high resolution structures and
textures can be estimated efficiently.
Super-Resolution 3D Reconstruction from Multiple Cameras
483

(a) 3D object and 7 × 7 cameras
(b) low resolution camera images
Recovered high resolution 3D structure
(c) proposed (d) stereo (e) ground truth
Recovered high resolution texture
(f) proposed (g) bi-cubic (h) ground truth
Figure 3: Results of super-resolution reconstruction (lenna).
5 EXPERIMENTS
We next show the efficiency of the proposed me thod
by using synthetic images as well as real images.
(a) 3D object and 7 × 7 cameras
(b) low resolution camera images
Recovered high resolution 3D structure
(c) proposed (d) stereo (e) ground truth
Recovered high resolution texture
(f) proposed (g) bi-cubic (h) ground truth
Figure 4: Results of super-resolution reconstruction (man-
drill).
5.1 Synthetic Image Experiments
We first show that high resolution 3D structures and
textures can be obtained from th e pro posed meth od
by using sy nthetic images.
Fig. 3 (a) shows a 3D object used in our synthe-
tic image experiment. The 7 × 7 quadrangular py-
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
484
ramids in this figure show the position and the orienta-
tion of 49 cameras used in our super resolution recon-
struction. These cameras were assumed to be calibra-
ted in this experiment. The image resolution of each
camera is 6 pix × 6 pix, and 49 images obtained from
Fig. 3 (a ) are shown in Fig . 3 (c). The intensity r ange
of these images is 0 to 1, and the random Gaussian
noise with the standard deviation of 0.01 was added to
the image intensity for simulating th e image noise in
observation. These low resolution images were used
for recovering high resolution 3D structures and tex-
tures with the resolution of 24 pix × 24 pix.
Fig. 3 (c) shows a high resolutio n 3D structure
obtained from the proposed method. The ground truth
structure is shown in Fig. 3 (e). For comparison, we
also reconstructed the 3 D structure from the low re-
solution images by using the standard stereo metho d.
The obtained 3D structures is shown in Fig. 3 (d). As
shown in these figures, the proposed method provides
us fine structure of the original shape, while the stan-
dard stereo method suffers from the aliasing problem,
and cannot recover correct shape of object.
We next show a high resolution texture, i.e. high
resolution image at th e basis camera, recovered from
the proposed method. Fig. 3 (f) shows the resu lt from
the proposed method, and Fig. 3 (h) shows the groun d
truth textur e. For compariso n, the result from the
standard bi-cubic interpolation is also shown in Fig. 3
(g). As shown in these figures, the proposed method
provides us the high resolution texture of the object
accurately, even if the input im ages ar e very low re-
solution. On the contrary, the result from the standard
bi-cubic interpolation is very bad.
Fig. 4 shows the results from another synthetic 3D
object. Again, the proposed method provides us very
accurate high resolutio n structure and texture, while
the standard stereo method and bi-cubic interpolation
cannot recover high resolution structure and texture.
The numerical accuracy of recovered structures and
textures shown in tab le 1 and table 2 also show the
efficiency of the proposed method.
Table 1: Accuracy of recovered high resolution 3D struc-
ture.
proposed method existing method
lenna 0.0185 0.0405
mandrill 0.0195 0.0406
Table 2: Accuracy of recovered high resolution texture.
proposed method existing method
lenna 0.0636 0.0910
mandrill 0.1035 0.1734
5.2 Real Image Experiments
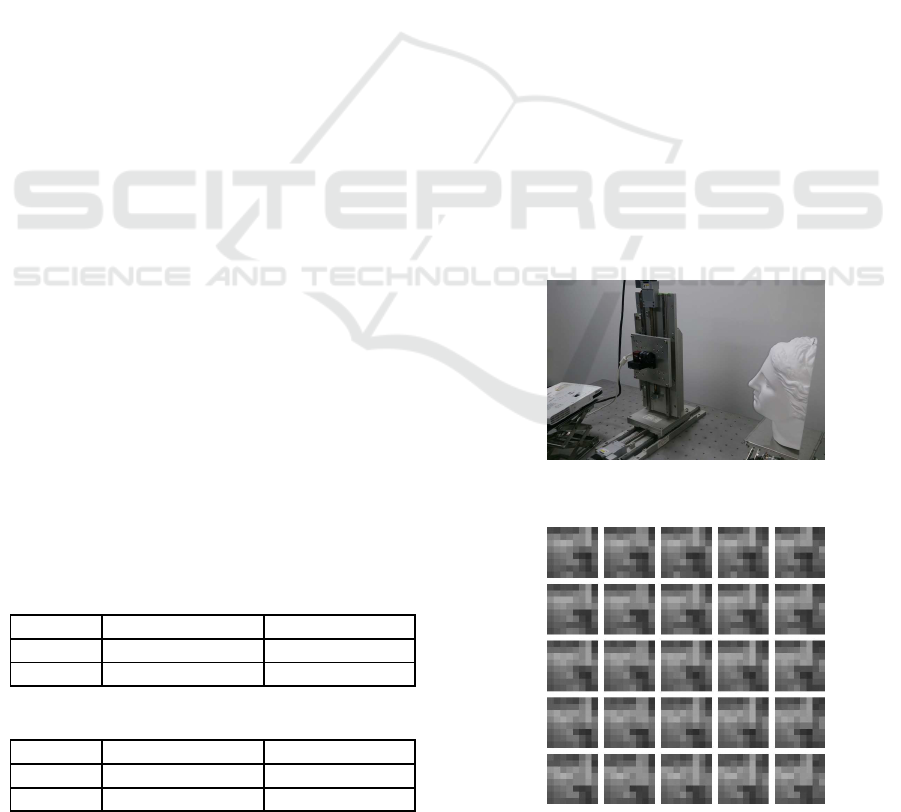
We n ext show the results from real image experiment.
In this experiment, we recovered the high reso lution
structure and texture o f a plaster face shown in Fig. 5.
The plaster face was observed by a camera whic h was
translated in 2 directions by usin g a moving stage
shown in Fig. 5, and 5 × 5 images were obtained with
every 2cm translation. For o btaining the ground truth
image of high resolution texture, we generated the
low resolution images by taking the average of 4 × 4
pixels, and used th e se low resolution images for super
resolution 3D reconstruction. The ground tr uth shap e
of the object was measured by using structured lig-
hts projected from the projector in Fig. 5, and the ca-
mera internal parameters were calibrated in advance
by using a calibration board. Fig. 6 shows 5 × 5 low
resolution images obtained from the camera. The re-
solution o f these images is 8 × 8. We used these low
resolution images for recovering the high resolution
structure and texture whose resolution is 3 2 × 32.
Fig. 7 (a) shows the high resolution 3D structure
recovered from the pr oposed method, and (c) shows
the ground truth of the structure. For comparison the
result from the standa rd stereo me thod is shown in
Fig. 7 (b). As shown in this figure, the result from the
proposed method is very fine and accurate, while the
result f rom the standard stereo is very rough and in-
accurate. The high resolution textures recovered from
the pr oposed method is also com pared with that of the
Figure 5: The experimental setup of our real i mage experi-
ment.
Figure 6: Low resolution images obtained from a moving
camera.
Super-Resolution 3D Reconstruction from Multiple Cameras
485
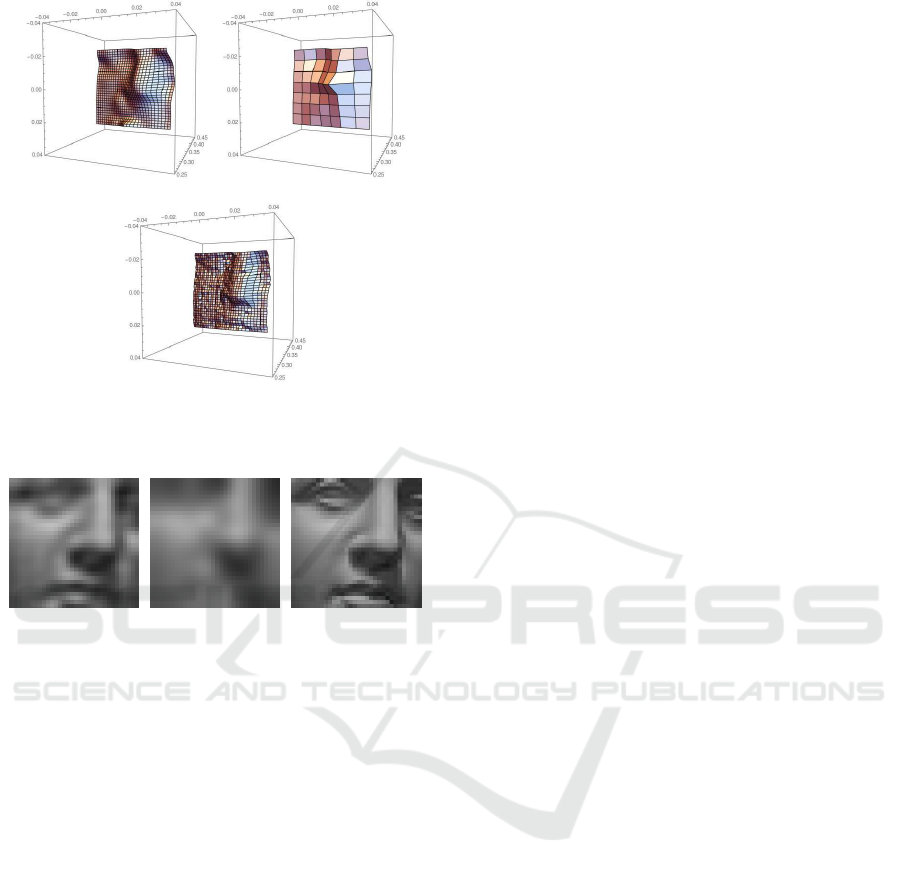
(a) proposed (b) stereo
(c) ground truth
Figure 7: The high resolution 3D structures recovered from
low resolution images.
(a) proposed (b) bi-cubic (c) ground truth
Figure 8: The high resolution textures recovered from low
resolution images.
bi-cubic interpolation in Fig. 8. Again, the proposed
method is superior to the standard bi-cubic method.
From these results, we find that the proposed met-
hod is very efficient to recover accurate high resolu-
tion 3D structures and textures.
6 CONCLUSION
In this paper, we proposed a novel method for recon-
structing high resolution 3D structure and texture of
the scene. For this objective, we extended the 2D
image super-resolution into 3D space, and showed
that it is possible to recover high resolution 3D struc-
ture and high resolution texture of the scene from low
resolution images taken at different viewpoints.
We showed the efficiency of the prop osed method
by using real and synth etic image experimen ts com-
paring with the existing methods.
REFERENCES
Agarwal, S., Furukawa, Y., Snavely, N., Simon, I., Curless,
B., Seitz, S. M., and Szeliski, R. (2011). Building
rome in a day. Commun. ACM, 54(10):105–112.
Faugeras, O., Luong, Q., and Papadopoulo, T. (2004). The
geometry of multiple images: the laws that govern the
formation of multiple images of a scene and some of
their applications. MIT press.
Galliani, A., K.Lasinger, and Schindler, K. (2015). Mas-
sively parallel multiview stereopsis by surface normal
diffusion. In Proc. ICCV.
Glasner, D., Bagon, S ., and Irani, M. (2009). Super-
resolution from a single image. In Proc. ICCV.
Hardie, R., Barnard, K., and Armstrong, E. (1997). Joint
map registration and high-resolution image estima-
tion using a sequence of undersampled images. IEEE
Transactions on Image Processing, 6(12):1621–1633.
Hartley, R. and Zisserman, A. (2000). Multiple View Ge-
ometry in Computer Vision. Cambridge University
Press.
Kim, J., Lee, J., and Lee, K. (2016). Accurate image super-
resolution using very deep convolutional networks. In
IEEE Conference on Computer Vision and Pattern Re-
cognition, pages 1646–1654.
Ledig, C., Theis, L., Huszar, F., Caballero, J., Cunning-
ham, A., Acosta, A., Aitken, A., Tejani, A., Totz, J.,
Wang, Z., and Shi, W. (2016). Photo-realistic single
image super-resolution using a generative adversarial
network. In Proc. IEEE Conference on Computer Vi-
sion and Pattern Recognition, pages 2414?–2423.
Longuet-Higgins, H. (1981). A computer algorithm for re-
constructing a scene from two projections. Nature,
293:133–135.
Schonberger, J., Zheng, E., Pollefeys, M., and Frahm, J.-
M. (2016). Pixelwise view selection for unstructured
multi-view stereo. In Proc. ECCV.
Shashua, A. and Werman, M. (1995). Trilinearity. In Proc.
ICCV, pages 920–925.
Tom, B., Katsaggelos, A., and Galatsanos, N. (1994). Re-
construction of a high resolution image from registra-
tion and restoration of low resolution i mages. In Proc.
IEEE International Conference on Image Processing,
pages 553–557.
Triggs, B., McLauchlan, P., Hartley, R., and Fitzgibbon, A.
(1999). Bundle adjustment - a modern synthesis. In
Proc. International Workshop on Vision Algorithms.
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
486
