
ScaleNet: Scale Invariant Network for Semantic Segmentation
in Urban Driving Scenes
Mohammad Dawud Ansari
1,2
, Stephan Krauß
1
, Oliver Wasenm
¨
uller
1
and Didier Stricker
1,2
1
German Research Center for Artificial Intelligence (DFKI), Germany
2
University of Kaiserslautern, Germany
Keywords:
Semantic Segmentation, Autonomous Driving, Labeling, Automotive, Scale.
Abstract:
The scale difference in driving scenarios is one of the essential challenges in semantic scene segmentation.
Close objects cover significantly more pixels than far objects. In this paper, we address this challenge with a
scale invariant architecture. Within this architecture, we explicitly estimate the depth and adapt the pooling
field size accordingly. Our model is compact and can be extended easily to other research domains. Finally,
the accuracy of our approach is comparable to the state-of-the-art and superior for scale problems. We evaluate
on the widely used automotive dataset Cityscapes as well as a self-recorded dataset.
1 INTRODUCTION
One basic technology for Autonomous Driving and
Advanced Driver Assistance Systems (ADAS) is a se-
mantic segmentation of the scene in front of the car.
This segmentation is used to understand the surroun-
ding of the car and adapt its actions accordingly. Such
a segmentation should be able to differentiate between
the road and the sidewalk as well as detect pedestri-
ans, cars, vegetation, traffic signs and many more.
The Computer Vision community applies for this
task so-called per-pixel semantic labeling algorithms
to images captured by a front-facing camera of the car.
These algorithms are usually based on Convolutional
Neural Network (CNN), and each pixel in the image
is labeled with an identifier (ID) indicating the seman-
tic class. The networks are trained with a huge dataset
like Cityscapes (Cordts et al., 2016) and achieve rea-
sonable accuracy.
One essential challenge in the context of driving
scenarios is the scale of objects. When looking at a
street similar objects can appear very close to the ca-
mera as well as very far. Since the depth of the objects
is inversely proportional to their scale, these objects
can cover a very different amount of pixels. The scale
difference can be multiple dozens. Thus, these scale
differences need to be explicitly considered in the net-
work architecture.
In this paper, we propose a new architecture for se-
mantic scene segmentation called Scale Invariant Net-
work (ScaleNet). Within this network, we explicitly
estimate the depth out of the input image and adapt
the pooling field size accordingly. With this appro-
ach, fine details in high distance can be preserved as
well as large objects in short range.
The main contributions of the paper are two-fold:
First, a quantized depth network is utilized to estimate
sufficient depth information which is further used by
the segmentation network to adjust the pooling field
size. Second, we describe a scale invariant seman-
tic segmentation neural network model, which can
cope with difficult scale changes for similar objects.
This model is found to perform robustly in challen-
ging automotive scenarios, like the Cityscapes data-
set (Cordts et al., 2016). One can use the same net-
work for much simpler datasets, such as PASCAL
VOC (Everingham et al., 2015) and MS COCO (Lin
et al., 2014). Finally, we provide a qualitative and
quantitative evaluation of our approach on the Citys-
capes dataset as well as a self-captured dataset.
2 RELATED WORKS
Semantic segmentation as dense per pixel labeling has
been studied from different perspectives for over a de-
cade. The algorithms in the state of the art can be ca-
tegorized into three groups. The first group is based
on using image pyramid methods. It is done by ge-
nerating a multi-scale input image, feeding it to the
CNN and then fusing all the feature maps from every
Ansari, M., Krauß, S., Wasenmüller, O. and Stricker, D.
ScaleNet: Scale Invariant Network for Semantic Segmentation in Urban Driving Scenes.
DOI: 10.5220/0006723003990404
In Proceedings of the 13th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2018) - Volume 5: VISAPP, pages
399-404
ISBN: 978-989-758-290-5
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
399

Figure 1: Qualitative evaluation of ScaleNet (ours) compared to the ground truth of the benchmark dataset Cityscapes (vali-
dation set).
scale. Small-scale input will encode contextual infor-
mation while the larger scale will encode small ob-
ject details. There are several implementation details:
(Farabet et al., 2013) converts input images to multi-
scale images through a Lapalacian pyramid and feeds
them to a CNN. In contrast, (Lin et al., 2016b), (Chen
et al., 2016b) and (Chen et al., 2016a) pre-process in-
put images by directly resizing them to different sca-
les. However, the limitation of this type of methods
is the amount of memory required for deeper/larger
models, especially to the high-resolution datasets (i.e.
Cityscapes), hence resizing can be done during infe-
rence phase only (Briggs et al., 2000).
The second group of approaches use encoder-
decoder networks. In the encoder the features map
are reduced by sets of convolution and max/average
pooling computation, while the spatial dimension and
object details of the input images are recovered in the
decoder. Several methods are proposed, for example
(Long et al., 2015a; Noh et al., 2015) use deconvolu-
tion layers to up-sample low resolution features map.
Another approach is to use skip connections (Ronne-
berger et al., 2015). The effectiveness of this met-
hod has been demonstrated by RefineNet (Lin et al.,
2016a), which achieves comparable results on several
benchmarks of semantic segmentation. Another vari-
ant is atrous convolution to up-sample feature maps
by using the decoder. DeepLab-v2(Res101) (Chen
et al., 2016a) proposes atrous convolution, which ex-
plicitly controls the resolution of the feature maps in
the CNN layers. It inserts a ’hole’ to the convolu-
tion kernel to enhance the receptive field in the feature
maps. Atrous convolution or dilation convolution has
been explored for semantic segmentation. For exam-
ple, (Wu et al., 2016) are experimenting with different
dilation rates to get better results.
The third group of approaches is motivated by spa-
tial pyramid pooling (Grauman and Darrell, 2005; La-
zebnik et al., 2006) to capture context from different
ranges. DeepLab-v2(Res101) (Chen et al., 2016a)
employs atrous convolution layers with different ra-
tes in parallel as in spatial pyramid pooling to capture
information from multi-scale feature maps. Pyramid
Scene Parsing Net (PSPNet) (Zhao et al., 2016) pro-
duces outstanding results in several benchmarks by
employing spatial pooling at several grid scales.
3 ADAPTIVE POOLING
Since the scale of distant objects is smaller compa-
red to an identical object close by, an ambiguity in the
appearance is created. We aim to resolve this shor-
tcoming of segmentation algorithms by utilizing the
depth of the scene as an additional modality to cope
with the changes in appearance following the work
of (Kong and Fowlkes, 2017). This can be stated
as depth is inversely proportional to scale. We esti-
mate depth out of the color input image to account
for the scale changes within the scene since depth ca-
meras are known to be error proven in automotive
context (Yoshida et al., 2017). Each depth estima-
tion corresponding to a pixel serves as an approxima-
tion for the scale of the pooling field that covers this
pixel. Unlike the conventional depth estimation net-
works where the accuracy of per-pixel depth affects
the overall performance of the algorithm, we quan-
tize the depth range in a small set, e.g., four. These
depth sets are then used to adapt the pooling field
size in the network during training. One can also use
raw depth value. As shown by (Kong and Fowlkes,
2017) using estimated depth boosts the performance
of the model. One reason for this increased perfor-
mance can be that the parameters are tuned in such a
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
400
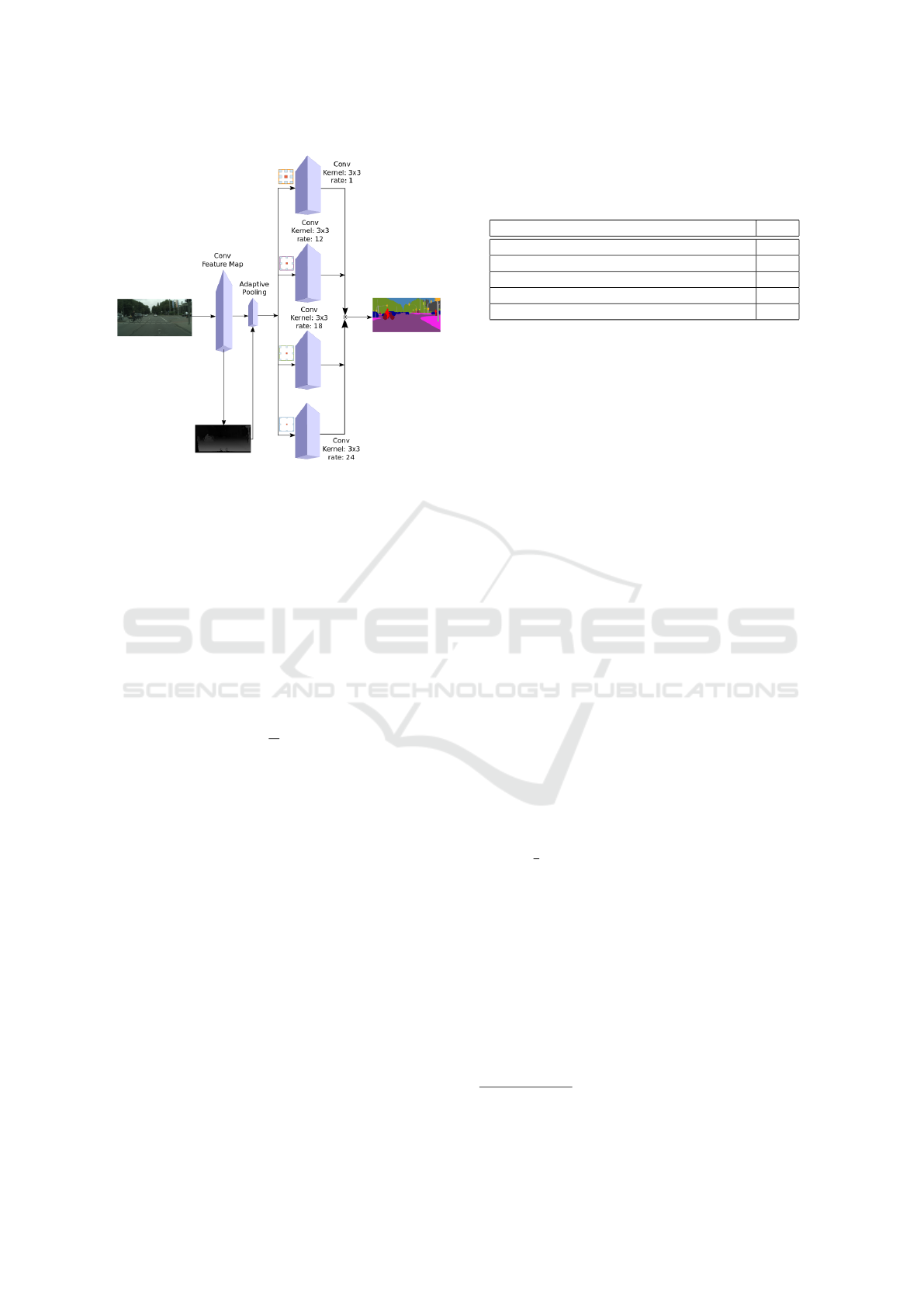
Figure 2: Architecture of the desired model is shown. This
model generates depth as the intermediate result, which is
used for adaptive pooling.
way that they predict depth which overall elevates the
performance of the segmentation network. Following
DeepLab-v2(Res101) (Chen et al., 2016a) atrous con-
volution is used to match the pooling field size. The
depth prediction network is a classification network
with a fixed number of classes. We used a simple re-
gression model which minimizes the Euclidean dis-
tance between the actual and the predicted depth for
all the valid pixels available in the ground truth data,
which is given as
l
depthReg
(D, D
∗
) =
1
V
∑
(i, j)∈V
D
i j
− D
∗
i j
2
2
. (1)
4 DILATED CONVOLUTION
Semantic segmentation is obtained using CNN in
a fully connected fashion and max/average pooling
(Long et al., 2015a; Li et al., 2016). A stack of these
operations reduces the resolution of the feature map
up to 32 times compared to the original size of the
image input (Chen et al., 2016a). This issue leads to
the diminishing response in a feature map as we go
deeper in the network. One remedy for this issue is
proposed by (Chen et al., 2016a). We follow a si-
milar method, which adjusts the pooling field size by
matching the dilation rate of the atrous convolution
(Kong and Fowlkes, 2017). This algorithm allows us
to compute the responses of any layer at any desired
resolution. This technique has proven to be very in-
tuitive and natural in the sense that we do not need to
tune any parameters manually.
Table 1: Quantitative evaluation of several state-of-the-art
approaches and ScaleNet (ours) for benchmark dataset Ci-
tyscapes (validation set). We use average IoU as the evalu-
ation metric. The metric is multiplied by 100.
Method IoU
FCN-8s (Long et al., 2015b) 65.3
RefineNet (Chen et al., 2016a) 73.6
RecurrentParsing (Kong and Fowlkes, 2017) 78.2
DeepLab-v2(Res101) (Chen et al., 2016a) 70.4
ScaleNet (ours) 75.1
Initially designed for wavelet transform in the
”algorithme
´
atrous” scheme of (Holschneider et al.,
1990), the method can also be used to find the
response of any feature map. Considering two-
dimensional signals, for each location i on the output
y and a filter w, atrous convolution is applied over the
input feature maps x as
y[i] =
∑
k
x[i + r · k]w[k], (2)
where r is the rate parameter that corresponds to the
stride with which the input is sampled (Chen et al.,
2016a).
5 MODEL ARCHITECTURE
The model architecture is shown in Figure 2 consists
of two sub-networks: An adaptive pooling, which is
controlled by a depth regression network, and a net-
work which fuses the responses of the atrous convo-
lution with different self-adjusting dilation rates. We
use a pre-trained ResNet101 model for feature gene-
ration with some modifications for maintaining the re-
solution of the output score maps according to (Chen
et al., 2016a; Kong and Fowlkes, 2017). The top glo-
bal 7 × 7 pooling layer and the last two 2 × 2 pooling
layers are removed, and an atrous convolution layer
with dilation rate of two is inserted. This will gene-
rate the
1
8
size of the output score map compared to
the input image size. Finally, a bilinear interpolation
is applied on the output score map to obtain the iden-
tical resolution as input. As a result, the feed-forward
network remains the same as DeepLab-v2(Res101),
but with two additional 3 × 3 kernel (without atrous
convolution) added above the generated feature maps
from the ResNet101 feature generation model. Af-
ter this, one 3 × 3 atrous convolution layer is added
whose rate is adjusted using adaptive pooling module.
Implementation. For the implementation we reused
parts of the open-source software
1
of (Kong and Fo-
wlkes, 2017), who uses the MatConvNet (Vedaldi and
1
https://github.com/aimerykong/Recurrent-Scene-
Parsing-with-Perspective-Understanding-in-the-loop
ScaleNet: Scale Invariant Network for Semantic Segmentation in Urban Driving Scenes
401
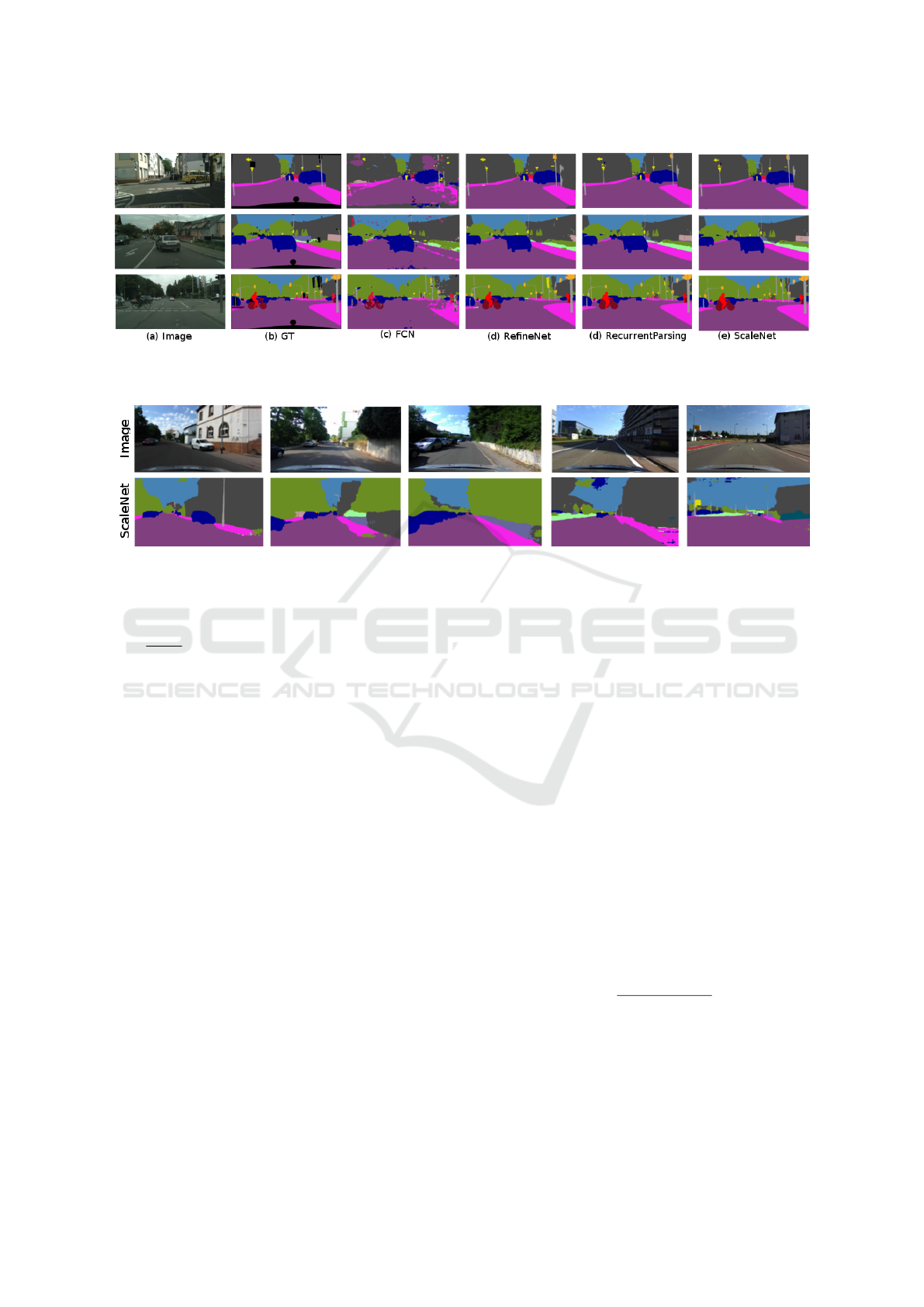
Figure 3: Qualitative evaluation of FCN-8s (Long et al., 2015b), RefineNet (Lin et al., 2016a), RecurrentParsing (Kong and
Fowlkes, 2017) and ScaleNet (our) for benchmark dataset Cityscapes (validation set).
Figure 4: Qualitative evaluation of ScaleNet (ours) for self captured ZED dataset.
Lenc, 2015) framework for designing the model. For
training, the batch size is set to one, and the learning
rate has a base value of 2.0 · 10
−5
which is scaled as
(1 −
iter
maxiter
)
0.7
. We trained the model by augmenting
extra datasets. Different data augmentation is perfor-
med for model training. A small image per object is
generated out of Cityscapes (Cordts et al., 2016) ima-
ges with an additional padding of 50px, and later we
create rotating inputs with additional zero-padded va-
lues to keep the input image a rectangular shape. The
rotation is performed in the range [−15
◦
, 15
◦
]. For
additional training coarse annotations including the
train-extra data is also available in Cityscapes. We
start the training with the fine annotated images, fol-
lowed by the coarse annotated images of Cityscapes
dataset. Later, augmented datasets are used in a se-
quence of small images followed by the rotated ima-
ges. Finally, the model is fine-tuned for ten more epo-
chs using fine annotation of Cityscapes. We trained
our model for 180 epochs.
6 EXPERIMENTS
We perform an experimental evaluation on the recog-
nized and widely used automotive semantic segmen-
tation dataset Cityscapes (Cordts et al., 2016). It con-
tains 2975 training, 1525 test and 500 validation set
images, which compose the fine annotation part of
the dataset. This dataset contains images from se-
veral German cities captured from a camera integra-
ted into a moving car. This dataset has been a stan-
dard for benchmarking an automotive semantic seg-
mentation algorithm, which is the reason why we also
choose this benchmark for our evaluation. We pro-
vide the quantitative results of our architecture on the
complete test set and provide our comparison with ot-
her well-known approaches such as FCN-8s (Long
et al., 2015b), RefineNet (Lin et al., 2016a), Recur-
rentParsing (Kong and Fowlkes, 2017) and DeepLab-
v2(Res101) (Chen et al., 2016a).
Additionally, we recorded a dataset ourselves.
This dataset is captured using a ZED stereo camera
installed on top of a car. We drive on multiple road
types with single and double lanes. For qualitative
evaluation, we take the images captured from the left
camera only.
For measuring the accuracy of our results we uti-
lize the intersection-over-union (IoU) metric, which
is well-known for the Cityscapes (Cordts et al., 2016)
and PASCAL VOC (Everingham et al., 2015) dataset.
The metric is defined as
IoU =
T P
T P + FP + FN
, (3)
where TP, FP, and FN are the numbers of true posi-
tive, false positive, and false negative pixels, respecti-
vely, determined over the whole test set (Cordts et al.,
2016). In Table 1 we compare our ScaleNet against
other approaches listed in Cityscapes. With an IoU
of 75.1% we achieve state-of-the-art performance. In
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
402

Table 2: Quantitative evaluation of FCN-8s (Long et al., 2015a), RefineNet (Lin et al., 2016a), RecurrentParsing (Kong and
Fowlkes, 2017), DeepLab-v2(Res101) (Chen et al., 2016a) and ScaleNet (ours) for benchmark dataset Cityscapes (validation
set). We use IoU as the evaluation metric. The metric is multiplied by 100.
Object FCN-8s RefineNet RecurrentParsing DeepLab-v2(Res101) ScaleNet (ours)
road 97.40 98.20 98.50 97.86 98.32
sidewalk 78.40 83.21 85.44 81.32 84.82
building 89.21 91.28 92.51 90.35 92.25
wall 34.93 47.78 54.41 48.77 50.05
fence 44.23 50.40 60.91 47.36 59.61
pole 47.41 56.11 60.17 49.57 62.75
traffic light 60.08 66.92 72.31 57.86 71.79
traffic sign 65.01 71.30 76.82 67.28 76.68
vegetation 91.41 92.28 93.10 91.85 93.16
terrain 69.29 70.32 71.58 69.43 71.35
sky 93.86 94.75 94.83 94.19 94.62
person 77.13 80.87 85.23 79.83 83.63
rider 51.41 63.28 68.96 59.84 65.15
car 92.62 94.51 95.70 93.71 95.05
truck 35.27 64.56 70.11 56.50 56.01
bus 48.57 76.07 86.54 67.49 71.64
train 46.54 64.27 75.49 57.45 59.88
motorcycle 51.56 62.20 68.30 57.66 66.28
bicycle 66.76 69.95 75.47 68.84 73.62
Table 2 we show the IoU for each class separately.
One can see that we achieve superior accuracy for
objects with fine geometry compared to other state-
of-the-art algorithms. This can be seen especially in
classes like fence, pole, traffic light, vegetation, bicy-
cle and many more. While we achieve superior accu-
racy for these classes, the remaining classes still have
comparable accuracies. Thus, we verified the scale
invariance of our network and showed the proper per-
formance of the adaptive pooling.
In Figure 1 we compare the labeling results of
ScaleNet with the ground truth of Cityscapes vali-
dation set. It can be seen that it highly matches the
ground truth labels in different driving scenarios. Ex-
cept for a few misclassifications ScaleNet provides
a decent accuracy comparable to state-of-the-art seg-
mentation algorithms. Homogeneous regions are cor-
rectly classified as well as objects with fine geometry.
In Figure 3 we qualitatively compare ScaleNet with
other state-of-the-art methods. First of all, ScaleNet
provides comparable accuracy since most labels are
classified correctly. When looking at objects with fine
structure – like poles or traffic lights – one can see
that we achieve higher accuracy there. This confirms
again the effectiveness of the scale invariant architec-
ture.
In Figure 4 we apply ScaleNet on the dataset we
recorded using the ZED camera. One can see that the
network performs well also on this dataset, although
it was trained on Cityscapes. Fine structures as well
as homogeneous regions are classified correctly. With
that we can verify that the network generalized well
to unknown images and scenes.
One remaining challenge in our approach is sharp
boundaries in the segmentation results – like for many
algorithms in the state-of-the-art. We tested several
approaches like edge-aware filtering (Wasenm
¨
uller
et al., 2015) with limited accuracy improvement.
7 CONCLUSION
In this paper, we proposed ScaleNet – a network ar-
chitecture for semantic scene segmentation – to ad-
dress scale differences. These scale differences occur
especially in driving scenarios, since objects can ap-
pear at very different distances. We showed that this
effect could be handled by an adaptive pooling depen-
ding on the depth of the respective pixel. In our evalu-
ation, we verified the state-of-the-art performance of
ScaleNet and showed the effect of the featured scale
handling.
Future work could be a combination of scene flow
(Schuster et al., 2018) or ego-motion (Wasenm
¨
uller
et al., 2016) estimation together with semantic seg-
mentation to support each estimation jointly while
computation.
ACKNOWLEDGEMENTS
This work was partially funded by the Euro-
pean project Eyes of Things under contract number
ScaleNet: Scale Invariant Network for Semantic Segmentation in Urban Driving Scenes
403

GA643924. Furthermore, we want to thank Alwi Hu-
sada for the fruitful discussions.
REFERENCES
Briggs, W. L., Henson, V. E., and McCormick, S. F. (2000).
A multigrid tutorial. SIAM.
Chen, L.-C., Papandreou, G., Kokkinos, I., Murphy, K., and
Yuille, A. L. (2016a). Deeplab: Semantic image seg-
mentation with deep convolutional nets, atrous con-
volution, and fully connected crfs. arXiv preprint
arXiv:1606.00915.
Chen, L.-C., Yang, Y., Wang, J., Xu, W., and Yuille, A. L.
(2016b). Attention to scale: Scale-aware semantic
image segmentation. In Computer Vision and Pattern
Recognition (CVPR), pages 3640–3649.
Cordts, M., Omran, M., Ramos, S., Rehfeld, T., Enzweiler,
M., Benenson, R., Franke, U., Roth, S., and Schiele,
B. (2016). The cityscapes dataset for semantic urban
scene understanding. In Computer Vision and Pattern
Recognition (CVPR).
Everingham, M., Eslami, S. M. A., Van Gool, L., Willi-
ams, C. K. I., Winn, J., and Zisserman, A. (2015).
The pascal visual object classes challenge: A retro-
spective. International Journal of Computer Vision
(IJCV), 111(1):98–136.
Farabet, C., Couprie, C., Najman, L., and LeCun, Y.
(2013). Learning hierarchical features for scene la-
beling. Pattern Analysis and Machine Intelligence
(PAMI), 35(8):1915–1929.
Grauman, K. and Darrell, T. (2005). The pyramid ma-
tch kernel: Discriminative classification with sets of
image features. In International Conference on Com-
puter Vision (ICCV), volume 2, pages 1458–1465.
IEEE.
Holschneider, M., Kronland-Martinet, R., Morlet, J., and
Tchamitchian, P. (1990). A real-time algorithm for
signal analysis with the help of the wavelet transform.
In Wavelets, pages 286–297. Springer.
Kong, S. and Fowlkes, C. (2017). Recurrent scene parsing
with perspective understanding in the loop. arXiv pre-
print arXiv:1705.07238.
Lazebnik, S., Schmid, C., and Ponce, J. (2006). Beyond
bags of features: Spatial pyramid matching for re-
cognizing natural scene categories. In Computer Vi-
sion and Pattern Recognition (CVPR), volume 2, pa-
ges 2169–2178. IEEE.
Li, Y., Qi, H., Dai, J., Ji, X., and Wei, Y. (2016). Fully
convolutional instance-aware semantic segmentation.
arXiv preprint arXiv:1611.07709.
Lin, G., Milan, A., Shen, C., and Reid, I. (2016a). Refi-
nenet: Multi-path refinement networks with identity
mappings for high-resolution semantic segmentation.
arXiv preprint arXiv:1611.06612.
Lin, G., Shen, C., van den Hengel, A., and Reid, I. (2016b).
Efficient piecewise training of deep structured models
for semantic segmentation. In Computer Vision and
Pattern Recognition (CVPR), pages 3194–3203.
Lin, T.-Y., Maire, M., Belongie, S., Hays, J., Perona, P.,
Ramanan, D., Doll
´
ar, P., and Zitnick, C. L. (2014).
Microsoft coco: Common objects in context. In Eu-
ropean conference on computer vision (ECCV), pages
740–755. Springer.
Long, J., Shelhamer, E., and Darrell, T. (2015a). Fully
convolutional networks for semantic segmentation. In
Computer Vision and Pattern Recognition (CVPR).
Long, J., Shelhamer, E., and Darrell, T. (2015b). Fully con-
volutional networks for semantic segmentation. In
Computer Vision and Pattern Recognition (CVPR),
pages 3431–3440.
Noh, H., Hong, S., and Han, B. (2015). Learning deconvo-
lution network for semantic segmentation. In Interna-
tional Conference on Computer Vision (ICCV), pages
1520–1528.
Ronneberger, O., Fischer, P., and Brox, T. (2015). U-
net: Convolutional networks for biomedical image
segmentation. In International Conference on Medi-
cal Image Computing and Computer-Assisted Inter-
vention, pages 234–241. Springer.
Schuster, R., Wasenm
¨
uller, O., Kuschk, G., Bailer, C., and
Stricker, D. (2018). Sceneflowfields: Dense interpo-
lation of sparse scene flow correspondences. In IEEE
Winter Conference on Computer Vision (WACV).
Vedaldi, A. and Lenc, K. (2015). Matconvnet – convoluti-
onal neural networks for matlab. In Proceeding of the
ACM Int. Conf. on Multimedia.
Wasenm
¨
uller, O., Ansari, M. D., and Stricker, D. (2016).
Dna-slam: Dense noise aware slam for tof rgb-d ca-
meras. In Asian Conference on Computer Vision
Workshop (ACCV workshop). Springer.
Wasenm
¨
uller, O., Bleser, G., and Stricker, D. (2015). Com-
bined bilateral filter for enhanced real-time upsam-
pling of depth images. In International Conference on
Computer Vision Theory and Applications (VISAPP),
pages 5–12.
Wu, Z., Shen, C., and Hengel, A. v. d. (2016). Bridging
category-level and instance-level semantic image seg-
mentation. arXiv preprint arXiv:1605.06885.
Yoshida, T., Wasenm
¨
uller, O., and Stricker, D. (2017).
Time-of-flight sensor depth enhancement for automo-
tive exhaust gas. In IEEE International Conference on
Image Processing (ICIP).
Zhao, H., Shi, J., Qi, X., Wang, X., and Jia, J. (2016).
Pyramid scene parsing network. arXiv preprint
arXiv:1612.01105.
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
404
