
Pedestrian Detection and Tracking in Thermal Images from Aerial
MPEG Videos
Ichraf Lahouli
1,2,3
, Robby Haelterman
1
, Zied Chtourou
3
, Geert De Cubber
1
and Rabah Attia
2
1
Royal Military Academy, Belgium
2
Tunisia Polytechnic School, Tunisia
3
Military Academy of Tunisia, Tunisia
Keywords:
Pedestrian Detection, Tracking, UAV, MPEG Motion Vectors, H.264.
Abstract:
Video surveillance for security and intelligence purposes has been a precious tool as long as the technology
has been available but is computationally heavy. In this paper, we present a fast and efficient framework for
pedestrian detection and tracking using thermal images. It is designed for automatic surveillance applications
in an outdoor environment like preventing border intrusions or attacks on sensitive facilities using image
and video processing techniques implemented on-board Unmanned Aerial Vehicles (UAV)s. The proposed
framework exploits raw H.264 compressed video streams with limited computational overhead. Our work is
driven by the fact that Motion Vectors (MV) are an integral part of any video compression technique, by day
and night capabilities of thermal sensors and the distinguished thermal signature of humans. Six different
scenarios were carried out and filmed using a thermal camera in order to simulate suspicious events. The
obtained results show the effectiveness of the proposed framework and its low computational requirements
which make it adequate for on-board processing and real-time applications.
1 INTRODUCTION
Pedestrian detection and tracking using thermal ima-
gery is a widely studied field for surveillance pur-
poses. Despite the lack of color and texture infor-
mation, the use of such images allows working on
both day and night-time. Classical image processing
techniques have been used to detect the presence of
pedestrians in both still and moving images, mainly
using stationary cameras. These cameras need power-
ful back-end computers and/or networks on which the
heavy lifting is done. When the problem is shifted
to low-performance processing platforms, the appli-
cability of this approach becomes hard. Indeed, new
platforms (e.g UAVs or wireless sensors networks)
are able to stream, in real time, videos captured by
optical or thermal sensors. However, the amount
of information transmitted is huge causing more po-
wer consumption due to video transmission which af-
fects the mission duration and also causing problems
of analysis and storage mostly because of unimpor-
tant information or redundancy. This paper propo-
ses an efficient framework to detect and track pede-
strians in thermal images for automatic surveillance
purposes with low processing requirements. The ROI
detection process is based on saliency maps in con-
junction with a contrast enhancement technique as a
first step to extract Regions Of Interest (ROI)s. Then,
the Discrete Chebychev Moments (DCM)s (Karaka-
sis et al., 2014) are used as a global image content
descriptor. Finally, a classification step is ensured by
a support Vector Machine (SVM) to distinguish be-
tween pedestrians and non pedestrians. The propo-
sed ROI detector is evaluated using two public ther-
mal pedestrian datasets: the OTCBVS benchmark -
OSU Thermal Pedestrian Database (Davis and Keck,
2005) and the nine thermal videos taken from the LI-
TIV2012 dataset (Torabi et al., 2012). In these two
datasets, humans are taken from a relatively high al-
titude which can simulate images taken from a low
altitude UAV. The performance of the proposed ROI
detector is compared to the Maximally Stable Extre-
mal Regions (MSER) detector (Matas et al., 2004) in
terms of true detections, false positives and calcula-
tion time. MSER is a fast and widely used region ba-
sed detector. Even though it was introduced in 2004,
MSER is still up to date and used in many works as
a region-based local extractor like recently in (Tun
et al., 2017; Sun et al., 2017; Kumar and Gupta, 2017;
Khosravi and Hassanpour, 2017; Alyammahi et al.,
Lahouli, I., Haelterman, R., Chtourou, Z., Cubber, G. and Attia, R.
Pedestrian Detection and Tracking in Thermal Images from Aerial MPEG Videos.
DOI: 10.5220/0006723704870495
In Proceedings of the 13th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2018) - Volume 5: VISAPP, pages
487-495
ISBN: 978-989-758-290-5
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
487

2017;
´
Sluzek, 2017). His popularity is due to his effi-
ciency to extract salient regions and his low complex-
ity which makes it adequate for real-time applications
and low-cost embedded systems. The obtained results
of comparison prove the robustness of the proposed
method in terms of true detection rate and its superio-
rity in terms of reducing false alarms and processing
time.
Furthermore, in order to test the proposed ROI
tracker in the context of outdoor surveillance, we ge-
nerated our own dataset by carrying out six different
scenarios of suspicious events and filmed the scene
using a thermal camera. The tracking process is ba-
sed on the MPEG MVs corresponding to the extracted
ROIs. In fact, the different bounding boxes are trac-
ked through the time and their intermediate estimated
positions are computed. However, we can not rely
exclusively on the MPEG MVs due to the estimation
errors generated by the codec. In order to compensate
these errors, the proposed ROI detector is launched
at a re-detection rate to update the positions and cor-
rect the small drifts. The proposed framework does
not need frame by frame, neither pixel by pixel pro-
cessing like in (Ma et al., 2016). It relies on some
frames for the ROI detection and on some MVs alre-
ady computed (as an integral part of the MPEG4 AVC
(H264 codec)) for tracking, which makes it suitable
for real-time applications with low-end computatio-
nal platforms.
The paper is organized as follows: In Section 2 we
review related state of the art works in motion-based
segmentation and tracking. In Section 3, the propo-
sed framework, composed of the ROI detector and
the ROI tracker, is explained in detail. Experiments
and results are presented in Section 4. We start by
presenting the different datasets and by setting the re-
direction rate. After that, we demonstrate the effecti-
veness of the proposed framework by presenting the
results of comparison between the proposed detector
and MSER in terms of accuracy and time consump-
tion and the performance of the tracking process. Fi-
nally, Section 5 concludes the present work and expo-
ses our perspectives for the future steps.
2 RELATED WORKS
The majority of the works in motion-based segmenta-
tion and tracking commonly uses Optical Flow (OF)
and local feature descriptors such as SIFT (Uemura
et al., 2008) or SURF (Bay et al., 2008) like re-
cently in (Zhang et al., 2017; Sundari and Manikan-
dan, 2017; Tun et al., 2017). For example, Wang and
Schmid worked on action recognition using improved
trajectories (Wang and Schmid, 2013). They estima-
ted camera motion by matching feature points using
dense OF and SURF descriptors. Then, they remo-
ved the corresponding trajectories to compensate the
camera motion( they relied on a human detector to re-
move inconsistent matches). Wu et al. used the dense
particle trajectories of the objects based on OF and
proposed an optimisation method to distinguish bet-
ween the trajectories of moving objects and those due
to the camera motion (Wu et al., 2011). Neverthe-
less, OF, whether sparse or dense, is time-consuming
and computationally heavy which limits the speed of
feature extraction and makes it inadequate for real-
time applications and challenges the mission auto-
nomy (duration of the UAV flight). Some works stu-
died the performance of MVs as an alternative to OF
for tracking, action recognition and surveillance pur-
poses. Among the first few who worked in this field,
are Park et al. in 2003, who proposed a tracking
scheme of an object in MPEG compressed domain
(Park and Lee, 2003). They estimated the camera mo-
tion using a generalised Hough transform and then
tracked the centre of the ROI based on the spatial
distribution of colors. In 2004, Babu et al. used
motion vectors of compressed MPEG video for seg-
mentation (Babu et al., 2004) then proposed MPEG
MV based features along with a Hidden Markov Mo-
del (HMM) modelling and motion history informa-
tion for action recognition (Babu and Ramakrishnan,
2004). In 2006, Yeo et al. made use of MV informa-
tion to capture the salient features of actions which
have independent appearances. They then computed
frame-to-frame motion similarity with a measure that
takes into account differences in both MV’s orienta-
tion and magnitude (Yeo et al., 2006). Aggarwal et
al. proposed a scheme for object tracking using back-
ground subtraction and motion estimation in MPEG
videos aggarwal2006object. However, their method
is mainly concerned with video surveillance applica-
tions where the cameras are fixed, which makes it not
suitable for implementation on an moving platform
like an UAV. Furthermore, the selection of the targets
is not automatic. The object to track is marked by
the user and not the result of any detection algorithm.
In 2013, Biswas et al. proposed an approach to clas-
sify H.264 compressed videos, by capturing orienta-
tion information from the motion vectors (Biswas and
Babu, 2013). They compute Histogram of Oriented
Motion Vectors (HOMV) in order to define the mo-
tion characteristics of space-time cubes that partially
overlap. They then used Bag of Features (BOF) ap-
proach for classification. K
¨
as and Nicolas present an
approach to trajectory estimation of moving objects
using the H264 MVs (K
¨
as and Nicolas, 2009). Their
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
488
method consists in performing a Global Motion Esti-
mation (GME) based on the MVs extracted from the
compressed stream. The generated outlier masks are
the input for an object detection stage, followed by
an object matching stage in order to estimate the tra-
jectories in the scene. However, the main drawback
of their method is that it can not deal with non mo-
ving people since the first step of their flowchart is
the GME.
In 2014, Kantorov et al. performed activity re-
cognition by computing Histograms of Optical Flow
(HOF) and Motion Boundary Histograms (MBH)
using the MPEG MVs as local descriptors, Fisher
Vector (FV) for coding and Support Vector Ma-
chine (SVM) for classification (Kantorov and Lap-
tev, 2014). They made a comparison to the OF and
showed that the use of MPEG MVs showed a sig-
nificant computational speedup ('66%) with a small
reduction of recognition accuracy. Recently, Zhang
et al. proposed a real-time action recognition met-
hod using MVs extracted directly during the decoding
process instead of OF. In order to boost the recog-
nition performance, they adapted the models of OF
Convolutional Neural Network (CNN) to MV CNN
(Zhang et al., 2016). Poularakis et al. proposed an
efficient motion estimation method for fast recogni-
tion of activities of daily living. They replaced OF
calculation with block matching randomly initialized
or based on the pre-computed MPEG MV (Poularakis
et al., 2017). Only data in Motion Boundary Activity
Area (MBAA)(Avgerinakis et al., 2013) are analysed
which means that full video decoding is not neces-
sary. These works are mostly dedicated for activity
recognition by describing short actions and non for
tracking people in long videos. In addition, non of
them worked with thermal images.
In this work, we consider detecting and tracking
pedestrians in UAV videos using thermal cameras for
day and night surveillance. We mainly focus on the
computational complexity and we use already avai-
lable MPEG MVs which makes it suitable for low-
performance processing algorithms and real-time ap-
plications.
3 PROPOSED METHODOLOGY
The proposed framework is mainly based on two al-
gorithms: the ROI detector and the ROI tracker. The
first one corresponds to the feature extractor which in
our case are pedestrians. Indeed, it consists of a hu-
man detector based on saliency maps in conjunction
with contrast enhancement techniques, while the dis-
crete Chebyshev moments are used as a global image
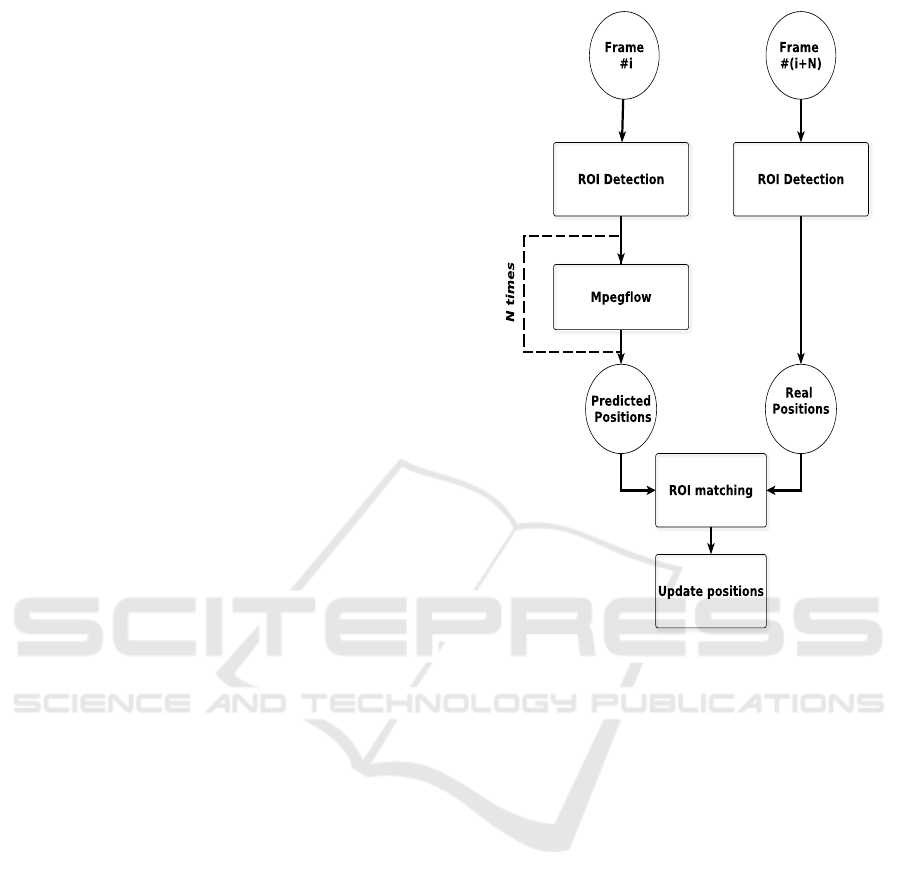
Figure 1: Flowchart of the proposed methodology.
i corresponds to the index of the reference frame and N cor-
responds to the re-detection rate (in frames) (see subsection
4.2 for details).
content descriptor and a linear support vector machine
(SVM) is used as a classifier. The second algorithm
aims to extract the MVs of the ROIs, drawn directly
from the MPEG compressed video. The aforemen-
tioned algorithms are combined to offer an efficient
framework for pedestrian detection and tracking with
low computational cost. It can be integrated within an
H.264 codec as it relies on the intermediary data that
is used to produce the output stream. We will present
consecutively the two algorithms in detail.
3.1 Proposed ROI Detector
In order to detect pedestrians in thermal images, we
extract hot spots assuming that a human is brighter
than his background, which is usually suitable for out-
door scenes. We detect ROIs taking into account cer-
tain restrictions regarding brightness and target size.
The pedestrian detection part is composed of the fol-
lowing three steps:
1. ROI extraction: A fusion between a saliency
map (produced on the basis of Lab colour space)
Pedestrian Detection and Tracking in Thermal Images from Aerial MPEG Videos
489

(Achanta et al., 2009) and a wavelet-based con-
trast enhancement technique (Arod
´
z et al., 2006),
2. Shape description: A global region content des-
criptor based on the DCMs (Karakasis et al.,
2014) up to order 4*4,
3. Classification: SVM in order to distinguish bet-
ween human and non-human blobs.
Initially, a Gaussian filter is applied to the input
image. The resulting output is fed to the saliency
map module and to the contrast enhancement mo-
dule. Then, the two outputs are normalized and fused
together using the geometric mean. Finally, the re-
sult is converted into a binary image by keeping only
hot spot areas, which are further filtered using a size
threshold to discard very small/large ROIs.
In this work, the saliency-based map is created
fast enough and highlights successfully the included
hot spots. The proposed method is kept intentionally
simple enough in order to combine efficiency and cal-
culation speed. We further enhance the results of the
saliency map by fusing its output with a contrast-
enhanced image. Another advantage of the propo-
sed method for ROI selection is that it darkens the
surrounding background of hot spots and at the same
time highlights them, preserving perfectly their shape.
This is very important, since, the shape of objects is
used by the Discrete Chebyshev Moment-based des-
criptor in order to further recognize human objects
using a linear SVM. In subsection 4.3, we will pre-
sent the results obtained after applying this algorithm
on the OSU Thermal Pedestrian Database (Davis and
Keck, 2005) and the LITIV2012 dataset (Torabi et al.,
2012).
3.2 Proposed ROI Tracker
The algorithms of ROI detection and MPEG MV ex-
traction are combined together to ensure the detection
and the tracking of pedestrians in thermal images
with low computational overhead. Initially, a refe-
rence frame is selected as an input image (Frame
#i). The detection algorithm is applied to extract the
ROIs (pedestrians). The resulting outputs are fed to
the MPEG MV extractor module which extracts the
MPEG MVs corresponding to the initial ROIs’ boun-
ding boxes. Actually, it starts by finding the macro-
blocks that cover each ROI (H264 codec splits each
frame in different macroblocs of 16 ∗ 16 pixels in our
case). Then, during the re-detection period (N times),
the algorithm keeps tracking the macroblocs by ex-
tracting their relative MPEG MVs and computing the
intermediate estimated positions. The figure 1 graphi-
cally illustrates the aforementioned process. Driven
by the fact that MVs are already computed as an in-
tegral part of the H264 codec, we gain a lot in terms
of computational cost. Indeed, during this period, we
avoid the cost of the frame by frame process since we
don’t require the image processing techniques (con-
trast enhancement + saliency map) to detect the pede-
strians. However, we cannot rely exclusively on the
MPEG MVs due to the errors generated by the es-
timation steps in the H.264 standard. The proposed
solution is to call the aforementioned ROI detector at
a re-detection rate N in order to compensate these er-
rors before pursuing the tracking. The choice of N de-
pends on different parameters such as the frame rate
and the resolution of the compressed video. An ana-
lysis in section 4.2 shows how N is set.
4 EXPERIMENTS & RESULTS
4.1 Presentation of the Different
Datasets
In order to validate the proposed ROI detector, we
used two different public datasets in outdoor urban
environment. Firstly, the OSU Thermal Pedestrian
Database (Davis and Keck, 2005), acquired by the
Raytheon 300D thermal sensor. It is composed of
10 test collections with a total of 284 frames taken
within one minute but not temporally uniformly sam-
pled. The OSU thermal dataset covers a panoply of
environmental conditions such as sunny, rainy and
cloudy days. Secondly, the nine thermal sequences ta-
ken from the LITIV2012 dataset (Torabi et al., 2012).
Actually, the dataset is composed of nine pairs of vi-
sualthermal sequences.
The public datasets, used to validate the propo-
sed ROI detector, are collections of frames that are
not temporally uniformly sampled and don’t provide
H.264 encoding data which make these datasets not
adequate to validate the proposed ROI tracker. In ad-
dition, they present pedestrians walking ’normally’ in
the street. However, our main purpose is to detect sus-
picious events of pedestrian taken from a thermal sen-
sor on-board an aerial platform and thus based on the
analysis of their trajectories and velocities. Therefore,
we have generated our own dataset by carrying out
some specific scenarios of suspicious events in out-
door environment. Video sequences were shot using
an MPEG thermal camera.
The different scenarios of abnormal events could
be described as follow:
1. Brutal Turn Back: two people move slowly in one
direction simulating two policemen. A suspicious
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
490

person walks in the opposite direction and will
quickly turn back as soon as he sees them.
2. Convergence/Divergence: three people converge
at a specific point. They quickly exchange a sus-
picious object and then diverge and quit the scene.
3. Velocity Changes: one person alternates between
walking and running.
4. Occlusion/Non Occlusion: one person tries to
hide behind a car.
5. Circular Trajectory: one person moves around a
car while focusing on it as if he has some robbery
intention.
6. Rapid Dump of Suspicious Object: one person is
walking and carrying a backpack. When he re-
ached a specific vehicle, he quickly throws his
backpack down and continues walking.
The thermal videos were shot using a stationary ca-
mera from a relatively high altitude (to simulate an
oblique view of an UAV) with a frame rate of 25
frames per second (fps) and an image resolution of
576*704 pixels.
4.2 Setting of the Re-detection Rate N
As mentioned before, we can not rely only on the
MPEG MVs to track the ROIs. In deed, a re-detection
is used at a specific rate N to avoid the propaga-
tion of the estimation errors caused by the extrac-
ted MPEG MVs. Choosing this rate is a trade-off
between guaranteeing good tracking accuracy and
keeping low computational requirements which are
our main worry. Firstly, we have taken as reference
image frame #i on which we applied the detection
process. We kept estimating the ROIs’ positions in
the following frames based on their MPEG MVs ex-
clusively. After that, we computed the overlap bet-
ween these estimated positions and the ROIs’ real po-
sitions. This overlap gives an indication of the esti-
mation performance and consequently the errors. The
re-detection rate should be as low as possible in order
to guarantee the low computational cost of the propo-
sed framework. In deed, starting from the reference
frame, we have to increase the number of frames af-
ter which we must re-launch the ROI detector process
because it is more costly than the MV extraction pro-
cess. At the same time, we have to ensure the robust-
ness of the MPEG MV based tracking algorithm. We
consider an estimation as good if it satisfies this con-
dition:
A
Detected
∩ A
Estimated
min(A
Detected
, A
Estimated
)
≥ 70% (1)
0 50 100 150
Re-detection period in frames (1 / re-detection rate)
0
10
20
30
40
50
60
70
80
90
100
Overlap ratio between estimated and real positions
X: 28
Y: 68.95
Figure 2: Estimation performance.
Where A
Detected
denotes the area of the detected ROI
(at Frame #(i)) and A
Estimated
is the area of the esti-
mated ROI (at Frame #(i +N)). We choose the same
criterion as in (Ma et al., 2016).
We tested the estimation performance on some
thermal videos with a frame rate equal to 25fps as
mentioned before. The examples are taken from the
same video of 676 frames in total. We started by de-
tecting the ROIs at frame #1 and then launched the
tracking process to determine their estimated positi-
ons in each successive frame. After that, we com-
puted the overlap between the real positions given
by the ROI detector and the estimated ones based on
their MPEG motion vectors. Figure 2 shows perfectly
how the estimation performance decreases dispropor-
tionally to the re-detection cycle. In order to satisfy
the condition in equation 1, N should be < 28.
As the frame rate is equal to 25fps, choosing N as
25 leads to a re-detection period of 1 second. In other
words, we will launch the ROI extraction algorithm
every 1 second. During this period, the tracking is en-
sured by the computation of the MPEG MVs relative
to the detected blobs. For the rest of the experiments,
N is set equal to 25.
The remainder of this section is organized as fol-
lows. We will present the performance of the propo-
sed ROI detector including the results of the compari-
son between the proposed ROI extractor and MSER.
After that, we will present some results of the pro-
posed ROI tracker using two examples that illustrate
how the trajectories are computed and the how positi-
ons are estimated.
Pedestrian Detection and Tracking in Thermal Images from Aerial MPEG Videos
491
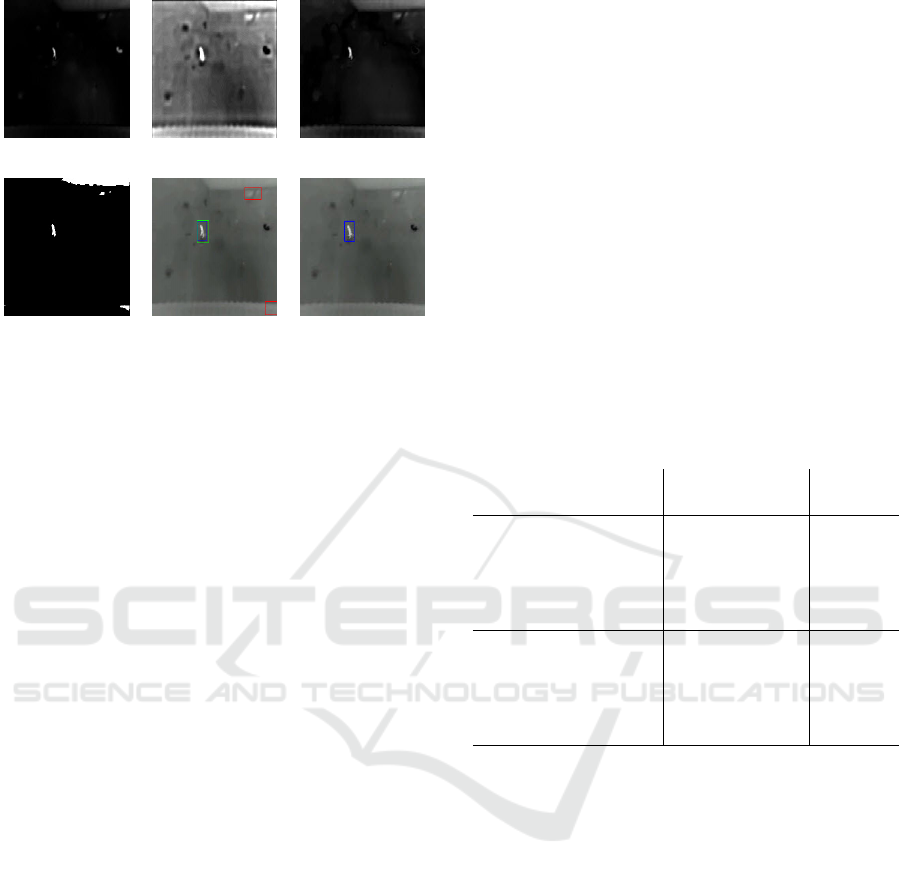
(a) (b) (c)
(d) (e) (f)
Figure 3: Examples of the different outputs of the proposed
ROI detector (LITIV2012 dataset).
(a): Saliency Map (b): Contrast Enhancement (c): geome-
tric mean of SM & CE (d): Binary image (e): Proposed ROI
extractor (f): SVM (green: Ground Truth ROIs, blue: true
detections, red: false positives).
4.3 Results of the Proposed ROI
Detector
Fig.3 illustrates the outputs of the different modules
that compose the proposed ROI detector including
SVM. The input is an image from the LITIV2012
dataset. 3.(a) presents the corresponding saliency
map and 3.(b) the result of the contrast enhancement
technique. These two outputs are combined together
based on their geometric mean to obtain 3.(c). At this
step, a brightness threshold is applied to obtain the bi-
nary image 3.(d) where the Hot Spots are highlighted.
After applying a size filter to discard very small/large
areas, ROIs are extracted like shown 3.(e). The green
bounding boxes correspond to the ground truth pre-
sented within the dataset. The blue bounding boxes
correspond to the true positives which satisfied the
equation (1) while the red ones clearly represent the
false positives. The DCMs of the detected ROIs are
computed as features vectors and fed to the SVM clas-
sifier. Figure 3.(f) shows how the SVM kept only the
true positives.
Firstly, the proposed ROI extractor (first stage of
the detector before the description and the classifica-
tion stages) is compared to the MSER detector (Matas
et al., 2004) which is a fast and widely used region
based detector. The implementation is done on Mat-
lab. Thus, we used the DetectMSERFeatures function
available within the Computer Vision System Tool-
box. For a reliable comparison, we kept the same
set of parameters as for the proposed ROI extractor.
The obtained results, shown in Table 1, prove
its robustness in terms of true detection with ap-
proximately 96% for the OSU Thermal Pedestrian
Database and 95% for the LITIV2012 dataset.
Furthermore, the proposed ROI extractor presents
the advantage of reducing number of false alarms
compared to the MSER detector which is a significant
gain and a great criterion for surveillance purposes.
In addition, it runs about two to three times faster.
At this point, the proposed method has not yet been
computationally optimized, which means that further
gains are possible if it is tweaked accordingly. These
two improvements are very important regarding the
final purpose which is a real time implementation
on a low-performance processing platforms. The
UAV should select and then send only pertinent
information to the central control station, that does
require human attention.
Table 1: Proposed ROI Extractor vs MSER.
Criterion Proposed ROI MSER
Extractor
OSU Thermal
True Detection Rate 95.55% 97.83%
False Alarms Rate 29.22% 51.63%
CPU-time per Image 0.17 s 0.46 s
LITIV2012
True Detection Rate 95.13% 85.28%
False Alarms Rate 26.25% 39.76%
CPU-time per Image 0.098s 0.151s
Once the ROIs are extracted, all of them are
resized at their mean size. These boxes are then
described using DCMs up to order (4,4) in order
to obtain a feature vector of 25 elements for each
sample. Half of the samples are reserved for the
training while the second half is used for test. Half
of the feature vectors are assigned for training
and the second half for testing the performance
of the classifier. Using the OSU Thermal Pede-
strian Database, we obtained 851 human samples
and 491 non human samples. We used different
kernels of SVM and we found out that the results
are quite similar so we keep using a linear SVM.
The maximum percentage of true positives is 88%.
Concerning the true negatives, all the kernels present
rates approaching 100% but this is explainable due
to their small number and nature as they are static
objects such as a public lighting pole or parked cars.
Using the thermal videos from the LITIV2012 da-
taset, we obtained 6237 human samples and 9997 non
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
492

(a) (b) (c)
Figure 4: Example of different outputs from the ROI detec-
tor (OSU thermal database).
(a): MSER detector (b): Proposed ROI extractor (c): SVM
(green: Ground Truth ROIs, blue: true detections, red: false
positives).
human samples. The increasing number of the
samples leads to a better training thus better classifi-
cation. For all the kernels, SVM gives a quite similar
true positives rate neighbouring the 98%.
Fig.4 illustrates the difference between the outputs
of MSER and the proposed ROI detector. It is shown
how the number of false alarms is reduced using the
proposed method while keeping a good true detection
rate.
4.4 Results of the Proposed ROI
Tracker
First of all, we will present how the two algorithms of
ROI detection and MEPG MV extraction work. Thus,
we start by showing in Fig.5 the outputs of the diffe-
rent algorithms applied between two re-detection ti-
mes (Frame #i & Frame #(i+N)). In this case, we
have selected i = 80 and N = 25. The figure 5.(a)
shows how the ROI detection algorithm is able to
detect the two pedestrians and trace two bounding
boxes around them (blue). These boxes define the
initial positions for the rest of the framework. The
figure 5.(b) illustrates how the estimation algorithm
proceeds. The macroblocks (blocs of 16*16 pixels)
that cover each ROI are determined, then their rela-
tive MPEG MVs are extracted. After that, we follow
these macroblocs through time during one cycle (from
Frame #(i+1) to Frame #(i+N)) in order to construct
the estimated trajectory for each one of them. The
estimated positions are then computed based only on
the resulting MPEG MVs. The figure 5.(c) presents
how the proposed algorithm traces the different esti-
mated trajectories of each macrobloc, by connecting
the intermediate positions and traces the final estima-
ted positions of each ROI (red). At this stage, the
ROI re-detection process is called in order to avoid
the propagation of the estimation errors in the rest of
the framework. Indeed, the final estimated position at
Frame #(i+N)) is updated by the real position obtai-
ned by the ROI detection algorithm.
Fig.6 shows the effectiveness of the proposed fra-
mework to predict the trajectories of three different
people in the convergence scenario. Like the first ex-
ample, blue boxes represent the output of the ROI ex-
tractor at the initial Frame #8. Red lines present the
estimated trajectories of each macrobloc. The green
boxes are the output of the ROI extractor at Frame
#(8+25). It shows how the framework is able to de-
tect the trajectories of the three people.
5 CONCLUSION & FUTURE
WORKS
This paper proposed an efficient framework for pede-
strian detection and tracking in thermal images with
low computational requirements. The fact that it is
not a frame by frame neither pixel level processing
and that it relies on MPEG MVs makes it suitable for
(a) (b) (c)
Figure 5: Example of the algorithms’ results applied between Frame #i and Frame #(i+N) (i=80, N=25).
(a): ROI detection results at Frame #i (b): ROI detection & estimation results (c): ROI detection at Frame #(i), estimation &
ROI re-detection at Frame #(i+N) results
(blue: Initial ROI positions, red: Estimated positions & trajectories, green: Real ROI positions).
Pedestrian Detection and Tracking in Thermal Images from Aerial MPEG Videos
493

(a) (b)
(c)
Figure 6: Example of trajectories’ estimations of three ROIs (convergence’s scenario).
(a): Initial Frame #8 Initial ROI positions,
(b): Final Frame #(8+25) final ROI positions,
(c): Estimated trajectories between Frame #(8) and Frame #(8+25).
real-time applications. The results show its effecti-
veness to detect and track the pedestrians. The pro-
posed framework can be used for automatic surveil-
lance purposes like suspicious behaviour detection.
As future works, the performance of the tracking al-
gorithm should be quantitatively measured using the
CLEAR MOT metrics (Bernardin and Stiefelhagen,
2008). After that, our perspectives consist on ex-
tracting not only trajectories but velocity and acce-
leration information from MVs. These features (tra-
jectory, velocity and acceleration) would be combined
to construct a complete system for action recognition
and abnormal event detection. Furthermore, the com-
putational cost can be reduced further if an online up-
date of the re-detection rate parameter is introduced.
REFERENCES
Achanta, R., Hemami, S., Estrada, F., and Susstrunk, S.
(2009). Frequency-tuned Salient Region Detection.
In IEEE International Conference on Computer Vision
and Pattern Recognition (CVPR 2009), pages 1597 –
1604.
Alyammahi, S. M. R., Salahat, E. N., Saleh, H. H. M., Slu-
zek, A. S., and Elnaggar, M. I. (2017). Hardware ar-
chitecture for linear-time extraction of maximally sta-
ble extremal regions (msers). US Patent 9,740,947.
Arod
´
z, T., Kurdziel, M., Popiela, T. J., Sevre, E. O., and
Yuen, D. A. (2006). Detection of clustered microcalci-
fications in small field digital mammography. Compu-
ter Methods and Programs in Biomedicine, 81(1):56–
65.
Avgerinakis, K., Briassouli, A., and Kompatsiaris, I. (2013).
Recognition of activities of daily living for smart
home environments. In Intelligent Environments (IE),
2013 9th International Conference on, pages 173–
180. IEEE.
Babu, R. V. and Ramakrishnan, K. (2004). Recognition of
human actions using motion history information ex-
tracted from the compressed video. Image and Vision
computing, 22(8):597–607.
Babu, R. V., Ramakrishnan, K., and Srinivasan, S. (2004).
Video object segmentation: a compressed domain ap-
proach. IEEE Transactions on Circuits and Systems
for Video Technology, 14(4):462–474.
Bay, H., Ess, A., Tuytelaars, T., and Van Gool, L. (2008).
Speeded-up robust features (surf). Computer vision
and image understanding, 110(3):346–359.
Bernardin, K. and Stiefelhagen, R. (2008). Evaluating mul-
tiple object tracking performance: The clear mot me-
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
494

trics. EURASIP Journal on Image and Video Proces-
sing, 2008(1):246309.
Biswas, S. and Babu, R. V. (2013). H. 264 compressed
video classification using histogram of oriented mo-
tion vectors (homv). In Acoustics, Speech and Signal
Processing (ICASSP), 2013 IEEE International Con-
ference on, pages 2040–2044. IEEE.
Davis, J. W. and Keck, M. A. (2005). A two-stage tem-
plate approach to person detection in thermal ima-
gery. In Application of Computer Vision, 2005.
WACV/MOTIONS ’05 Volume 1. Seventh IEEE Works-
hops on, volume 1, pages 364–369.
Kantorov, V. and Laptev, I. (2014). Efficient feature ex-
traction, encoding and classification for action re-
cognition. In Proceedings of the IEEE Conference
on Computer Vision and Pattern Recognition, pages
2593–2600.
Karakasis, E., Bampis, L., Amanatiadis, A., Gasteratos, A.,
and Tsalides, P. (2014). Digital elevation model fusion
using spectral methods. In 2014 IEEE International
Conference on Imaging Systems and Techniques (IST)
Proceedings, pages 340–345. IEEE.
K
¨
as, C. and Nicolas, H. (2009). An approach to trajectory
estimation of moving objects in the h. 264 compressed
domain. Advances in Image and Video Technology,
pages 318–329.
Khosravi, M. and Hassanpour, H. (2017). A novel image
structural similarity index considering image content
detectability using maximally stable extremal region
descriptor. International Journal of Engineering-
Transactions B: Applications, 30(2):172.
Kumar, A. and Gupta, S. (2017). Detection and recognition
of text from image using contrast and edge enhanced
mser segmentation and ocr. IJOSCIENCE (INTERNA-
TIONAL JOURNAL ONLINE OF SCIENCE) Impact
Factor: 3.462, 3(3):07–07.
Ma, Y., Wu, X., Yu, G., Xu, Y., and Wang, Y. (2016). Pe-
destrian detection and tracking from low-resolution
unmanned aerial vehicle thermal imagery. Sensors,
16(4):446.
Matas, J., Chum, O., Urban, M., and Pajdla, T. (2004).
Robust wide-baseline stereo from maximally sta-
ble extremal regions. Image and vision computing,
22(10):761–767.
Park, S.-M. and Lee, J. (2003). Object tracking in mpeg
compressed video using mean-shift algorithm. In In-
formation, Communications and Signal Processing,
2003 and Fourth Pacific Rim Conference on Multime-
dia. Proceedings of the 2003 Joint Conference of the
Fourth International Conference on, volume 2, pages
748–752. IEEE.
Poularakis, S., Avgerinakis, K., Briassouli, A., and Kompat-
siaris, I. (2017). Efficient motion estimation methods
for fast recognition of activities of daily living. Signal
Processing: Image Communication, 53:1–12.
´
Sluzek, A. (2017). Mser and simser regions: A link be-
tween local features and image segmentation. In
Proceedings of the 2017 International Conference on
Computer Graphics and Digital Image Processing,
page 15. ACM.
Sun, X., Ding, J., Dalla Chiara, G., Cheah, L., and Cheung,
N.-M. (2017). A generic framework for monito-
ring local freight traffic movements using computer
vision-based techniques. In Models and Technologies
for Intelligent Transportation Systems (MT-ITS), 2017
5th IEEE International Conference on, pages 63–68.
IEEE.
Sundari, V. K. and Manikandan, M. (2017). Real time im-
plementation of surf based target tracking algorithm.
International Journal on Intelligent Electronics Sys-
tems, 11(1).
Torabi, A., Mass
´
e, G., and Bilodeau, G.-A. (2012). An ite-
rative integrated framework for thermal-visible image
registration, sensor fusion, and people tracking for vi-
deo surveillance applications. Comput. Vis. Image Un-
derst., 116(2):210–221.
Tun, W. N., Tyan, M., Kim, S., Nah, S.-H., and Lee, J.-
W. (2017). Marker tracking with ar. drone for visual-
based navigation using surf and mser algorithms. ,
pages 124–125.
Uemura, H., Ishikawa, S., and Mikolajczyk, K. (2008). Fe-
ature tracking and motion compensation for action re-
cognition. In BMVC, pages 1–10.
Wang, H. and Schmid, C. (2013). Action recognition with
improved trajectories. In Proceedings of the IEEE
International Conference on Computer Vision, pages
3551–3558.
Wu, S., Oreifej, O., and Shah, M. (2011). Action recogni-
tion in videos acquired by a moving camera using mo-
tion decomposition of lagrangian particle trajectories.
In Computer Vision (ICCV), 2011 IEEE International
Conference on, pages 1419–1426. IEEE.
Yeo, C., Ahammad, P., Ramchandran, K., and Sastry, S. S.
(2006). Compressed domain real-time action recogni-
tion. In Multimedia Signal Processing, 2006 IEEE 8th
Workshop on, pages 33–36. IEEE.
Zhang, B., Wang, L., Wang, Z., Qiao, Y., and Wang, H.
(2016). Real-time action recognition with enhanced
motion vector cnns. In Proceedings of the IEEE Con-
ference on Computer Vision and Pattern Recognition,
pages 2718–2726.
Zhang, S., Zhang, L., Gao, R., and Liu, C. (2017). Mobile
robot moving target detection and tracking system. In
Proceedings of the 2017 The 7th International Confe-
rence on Computer Engineering and Networks. 22-23
July, 2017 Shanghai, China (CENet2017).
Pedestrian Detection and Tracking in Thermal Images from Aerial MPEG Videos
495
