
Using Functional near Infrared Spectroscopy to Assess Cognitive
Performance of UAV Sensor Operators during Route Scanning
Jazsmine Armstrong
1
, Kurtulus Izzetoglu
1
and Dale Richards
2
1
School of Biomedical Engineering, Science and Health Systems, Drexel University,
3141 Chestnut Street, Philadelphia, PA, U.S.A.
2
School of Mechanical, Aerospace and Automotive Engineering, Coventry University, Coventry, U.K.
Keywords: Unmanned Aerial Vehicles, UAV, Sensor Operators, Cognitive Workload, Functional near Infrared
Spectroscopy, fNIRS.
Abstract: The composition of UAV (Unmanned Aerial Vehicle) crew will sometimes define roles specific to tasks
associated with the Ground Control Station (GCS). The sensor operator task is specific to both the type of
platform and GCS they are operating, but in many instances the role of this operator is critical in determining
mission success. In order to assess mission effectiveness we applied human performance measures that
focussed on neurological brain imaging techniques and other physiological biomarkers in conjunction with
behavioral data acquired from the sensor operator task. In the execution of the experiment, this included such
tasks as route scanning, target detection and positive identification, and the tracking of identified targets.
Within the scope of this paper, we reported the preliminary results for the route scanning task. Over the
duration of three trials brain activity measures from the prefrontal cortex region were acquired via functional
near infrared spectroscopy (fNIRS) in this research study. As the trials progressed, there was a significant
difference between low and high performers on the route scanning task as determined by specific biomarkers,
namely oxygenated haemoglobin. These findings support previous studies and indicates the benefits of
applying neurophysiological measures in order to gain further objective insight into human cognitive
performance. The use of fNIRS in this context is also discussed in terms of providing a key benefit in
dynamically evaluating human performance in parallel with personalized training for UAV operators.
1 INTRODUCTION
A great deal of research is currently underway that
focuses efforts on integrating routine flights of UAVs
(Unmanned Aerial Vehicle) into the national airspace
system (NAS). Of course this is not as straightforward
as simply allowing such operations in current air
traffic operations (utilising the same traffic
management infrastructure), but requires a fuller
understanding of not only the nature of UAV
operations from this perspective but also the role of
the human who is tasked to control such platforms.
Thus, herein lies a unique problem. Apart from the
obvious differences between operating a manned
platform versus an unmanned platform, the
composition and defined roles of a UAV flight crew
is somewhat more dependent on the platform and
nature of operations. In some instances several roles
within the UAV crew may be shared across several
crew members, alternate between them, or in some
instances be carried out by the same individual
(Wickens et al., 2005). This presents the operator as a
focal point for ensuring not only the safe flying of the
UAV, but also the operational effectiveness
associated with the mission. By examining the way in
which UAV missions are conducted within the
defence realm, it is possible to use this as a means by
which we can assess how the operator (in this instance
the operator directing the sensor, as opposed to the
pilot) may be assessed in terms of his/her
effectiveness.
Previous evidence has suggested that nearly 70%
of all UAV incidents may cite causal factors that
would suggest the role of human factors as a
contributing factor (Williams 2004). The sensor
operator (SO) adopts a role that dictates a number of
specific tasks. At some points these tasks may be to
assist the pilot in command, perform other tasks not
specific to the mission but pertinent to the safe
operation of the flight (e.g. liaise with Air Traffic
286
Armstrong, J., Izzetoglu, K. and Richards, D.
Using Functional near Infrared Spectroscopy to Assess Cognitive Performance of UAV Sensor Operators during Route Scanning.
DOI: 10.5220/0006731502860293
In Proceedings of the 11th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2018) - Volume 4: BIOSIGNALS, pages 286-293
ISBN: 978-989-758-279-0
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Control). However, we will focus on the SO tasks that
are related to the mission context. Primarily this
involves a great deal of sensor manipulation, either
self-directed or instructed via a Mission Commander
or third party. In many instances the sorts of tasks this
would involve include scanning areas along the flight
path both on the ground and in the air, searching and
classifying tracks (and possible threats/targets);
whilst also focussing on the operational requirements
for the specific mission which may include other
requirements of the SO, such as gathering intelligence
in relation to building Pattern of Life (POL) and any
behaviour that may stand-out from the norm within
such POL (Kenner & Wolf, 2003).
Therefore the development of an efficient SO
must therefore be entrenched within an effective
training programme that allows the individual to
develop appropriate cognitive styles (Kirton 2003)
that best suit SO- specific tasks. In some instances
these may present as a completely new skill set that
must be effectively conveyed to trainees who may
have prior knowledge/experience of SO tasks or even
piloting manned aircraft. An appropriate training
methodology must be therefore designed that will
help to reinforce SO-specific cognitive styles that will
best suit the SO tasks. This will not only provide a
more effective means of conveying training to the
individual, but also assist in effectiveness as related
to the SO task; such as improving SO performance.
This includes improved search behaviour and track
classification and reducing incidents of false
identification (Kowalski-Trakofler & Barrett, 2003).
Apart from taking into account the different
cognitive styles of operators during training, it is
important to consider the role of attention during the
SO task. To some extent an individual's cognitive
style (or aptitude for the task) will determine how
they guide and control attentional resource and
demand during the course of a task. However, it is
beneficial to train attentional focus through the use of
realistic scenarios that most accurately mimic those
found in real-life (Wolfe et al., 2005). Prior studies
have shown that repetitive visual search training does
indeed help to transfer the search task from an overly
active one to a task where it is nearly automatic. This
can lead to improved target detection, and quicker
response time in regards to identifying a track.
(Treisman, Viera & Hayes, 1992). However, the
ability to use training for facilitating preattentive
processing (in terms of developing an instinctual
pattern for attentional processing) remains elusive.
In order for the operator of the UAV to reach a
particular level of operational competence, it is
expected that the operator will present significant
cognitive effort and activity associated with the
region of the brain associated with performing those
tasks. As with other muscle masses in the body, when
effort is required then we can expect a great deal of
metabolic activity, in order for the muscle to produce
an output. This may be comparative to cortical
activity when confronted with a task that has a level
of cognitive demand on resources. In order to meet
the metabolic demand associated with a task that
requires cognitive effort we can observe increases in
blood flow to the area of the brain that is asscoaited
with the task. In essence this is the blood carrying the
oxygen to the parts of the brain that require 'feeding'
in order to address the task being considered.
Traditionally these metabolic changes in brain states
have been measured by MRI, fMRI, and EEG. While
these established measures have allowed us to better
understand the physiological mechanisms for
cognitive activity they also have large degree of
constraints that do not allow us to conduct real-time
studies of participants in naturalistic settings (and at a
reasonable cost).
However, the use of different brain-imaging
techniques have allowed us to appreciate which areas
of the brain are clossely associated with cognitive
functioning. Of particular interest are the higher level
cognitive functioninig that include such tasks as
decision-making, problem-solving and attentional
focus. Advances in optical brain imaging techniques,
and in particular functional near infrared
spectroscopy (fNIRS), allow us to monitor the
hemodynamic changes of the participant as they
progress through different tasks associated with SO
role.
1.1 Functional near Infrared
Spectroscopy
Functional near infrared spectroscopy is a
neuroimaging modality that exploits the optical
properties of biological tissues and hemoglobin
chromophores. fNIRS deploys wavelength in the
range between 700 to 900 nm. At this wavelength, the
majority of biological tissues, including neural
tissues, are transparent while the chromophores of
oxygenated and de-oxygenated hemoglobin (HbO2
and HB, respectively) are found to be the main
absorbers. By examining the manner in which light
passes through cortical tissue (utilising the modified
Beer Lambert Law), concentrations of oxygenated
and deoxygenated hemoglobin can be calculated
(Jobsis, 1977; Cope, 1988). The changes in
oxygenated and deoxygenated hemoglobin are
directly associated with changes in brain activity
Using Functional near Infrared Spectroscopy to Assess Cognitive Performance of UAV Sensor Operators during Route Scanning
287

changes (Izzetoglu et al., 2004, Villringer et al.,
1997).
Figure 1: 16-Channel fNIRS System.
The current fNIRS system (as shown in Fig.1)
used in this study is proven to be a safe, non-invasive
optical method that can be utilized to monitor activity
within the prefrontal cortex of the brain (Obrig et al.,
1997, Villringer et al., 1997). Because of its
portability and ability to capture continuous measures
of the hemodynamic response while allowing
measures in natural settings, fNIRS seems a suitable
neuroimaging modality for assessment of pilot
performance in high fidelity simulation as well as
field study conditions.
1.2 UAV Training Simulator
In order to accurately translate the results of SO skill
acquisition in the field, it would follow logically that
the training apparatus must not only resemble the
work environment of the SO, but also present a high
fidelity representation of the task. (Cooke & Shope,
2004). To address this, we utilized Simlat’s C-STAR
simulator in this proof of concept study. The C-STAR
system consists of Performance Analysis &
Evaluation module (PANEL) that collects and
processes simulation data, whilst producing
comprehensive reports of trainees’ performance in
various tasks during a mission. The simulator has the
capability to transfer views between sensor operator
and pilot, as well as a realistic landscape, targets, and
accurate representations of UAV operator controls.
The software allows for two trainees and one
instructor to operate the generic tactical unmanned
vehicle (G-TAC UAV) simultaneously and in
designated roles, as well as the capability of the
instructor to manually or automatically preset
‘emergency’ situations that the pilot(s) might
encounter such as cloud cover, precipitation, and
equipment failure. This robust system is ideal for real
world training of both the sensory operator and pilot
roles of the UAV (Fig. 2).
Figure 2: UAV Simulator: C-STAR system.
2 METHOD
2.1 Participants
Fifteen participants between the ages of 19 to 40 ( =
23.8; SD =5.3) participated in the Institutional
Review Board (IRB) approved study. Out of 15
participants, there was only one participant excluded
due to an incomplete session. All participants (no
prior UAV piloting experience) fulfilled inclusion
and exclusion criteria of the IRB; they had either
normal or corrected to normal vision, and were
verified as right handed via use of the Edinburgh
Handedness assessment.
2.2 Experiment Protocol
The experimental protocol incorporated scan and
target search tasks. The generic tactical unmanned
vehicle (G-TAC UAV) was utilized to automatically
follow a pre-determined route. The trainee screen was
separated into a GPS screen to the left and a sensor
payload screen to the right (Fig. 3). The map screen
was intended to show the location of the UAV and the
route that the UAV has travelled along. The map
screen was locked to the UAV position, so the SO
could see the UAV move in conjunction with the
map. However, the trainee was provided with the
option to zoom in and out of the map. This was
intentionally designed to rule out any confounding
Real 2018 - Special Session on Assessing Human Cognitive State in Real-World Environments
288

factors that may have occurred regarding the position
of the vehicle on the map and consequent loss of
situational awareness of the SO as they actively
searched using the sensor screen to the right.
Figure 3: Experimental design view: Payload screen.
The sensor screen displayed the simulated model
of the landscape of Mallorca, Spain. Within the
sensor display a crosshair and zoom level gauge were
utilised by the operator in order to complete their
tasks. The simulated time and the duration of each
session was provided to the operator and displayed
above this display (Fig. 3). Other instruments were
provided to the operator that displayed primary flight
data, but were not able to be changed by the operator.
Figure 4: The route where the search task was performed.
At the start of each session the UAV was at 2500
feet with a 64 degree heading angle, and set to travel
along a designated flight path at a fixed speed of 70
knots (80.55 miles per hour). Between each sub-area
there was a length of 'dead space' at which time the
instructor could reposition the camera angle to the
widest zoom angle and positioned facing the nose of
the UAV (Fig. 4).
As the vehicle proceeded along the waypoints,
participants were instructed to scan the designated
route. A successful scan was determined to be a scan
at a zoom level lower than 15 degrees. Each sub-area
consisted of one target that needed to be classified as
a threat (in this instance a red civilian bus). To track
and identify a target, the participant was instructed to
zoom in as close as possible in the payload screen
using the hat switch on the joystick. Once the target
was located, the participant was instructed to lock
onto the target when it was positioned in the camera’s
crosshairs. In order to ascertain successful
identification, the participant was advised to track the
target for three seconds before moving the sensor off
the target and continuing to scan the surrounding area.
Each trial lasted for approximately 17.5 minutes and
was repeated 3 times, resulting in 52 minutes of total
flight time in the session. The route and scanning area
of the map were identical for all three trials, however
location of the target component was changed each
time. Clearly, this approach was implemented to
prevent a participant from simply recalling the
location of the target from the previous mission. The
C-STAR simulator system recorded percentage of the
area scanned, the duration of each session, and the
time at which a target was identified.
2.3 Data Analysis
The following task protocol data was analysed within
the scope of this paper:
The Scan Task: Participants were separated into
low and high performers based on their behavioural
performance data to conduct comparisons between
fNIRS measurements amongst the trials. The
simulator software provided behavioural data that
determined the percentage of the designated area that
was properly scanned, over scanned, or not scanned.
The percentage of properly scanned areas and the
camera field of view was used as a direct metric for
determining these performance levels (as shown in
Fig. 5).
fNIRS Data Analysis: Continuous wave and 16-
channel, covering left and right hemispheres, fNIRS
system was used in this study. Sampling rate was
2Hz. For the fNIRS data analysis, a low pass filter
with a finite impulse response and linear phase was
applied to the raw light intensity data for each
wavelength at each channel to tease out high
frequency noise, respiration and cardiac cycle effects
(Izzetoglu et al., 2005). Then, modified Beer-Lambert
Law (MBLL) was used to calculate the oxygenated
Using Functional near Infrared Spectroscopy to Assess Cognitive Performance of UAV Sensor Operators during Route Scanning
289
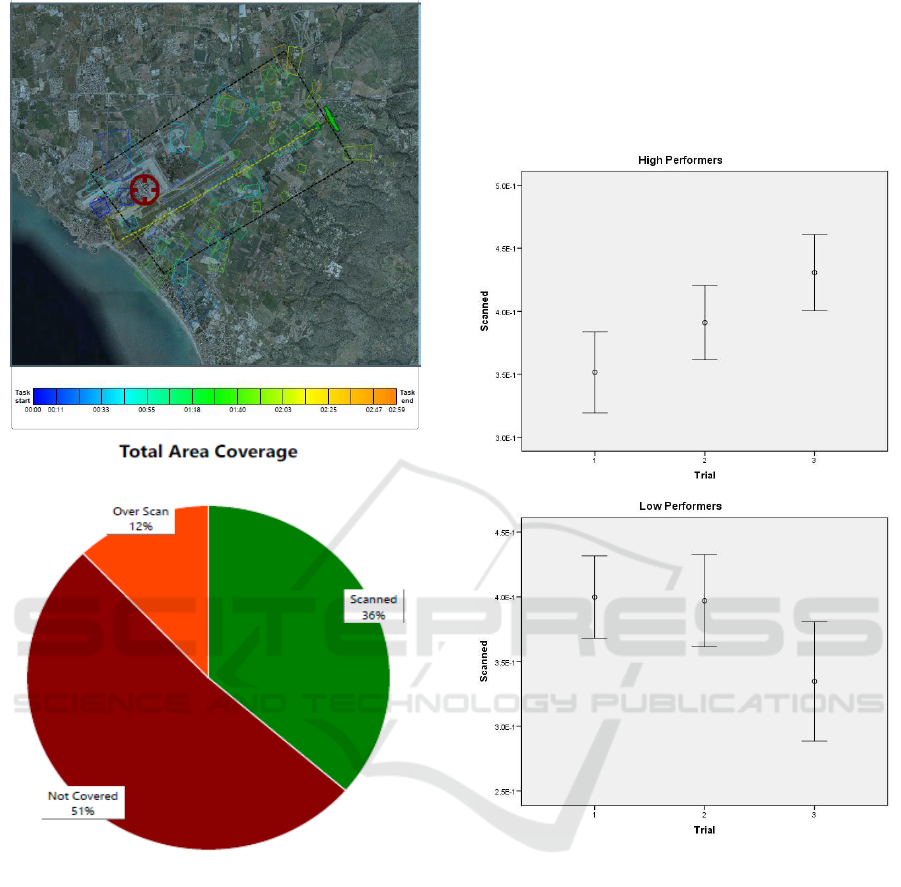
Figure 5: Example of performance analysis for scanning
task.
and deoxygenated haemoglobin changes at each
channel (Cope & Delpy, 1988; Villringer & Chance,
1988).
3 RESULTS
Based on the behavioural performance measures, the
trainees were classified into two groups within the
scope of the preliminary study reported here. Those
who increased their scan percentage within certain
field of view were placed in the high performers
group (Fig. 6a). If a participant performed worse
between initial trial and final trial, they were
classified as the low performer (Fig. 6b).
A significant difference in scanning task was
observed between initial and final trials, Trial 1 and
Trial 3, respectively. These results were also
confirmed by per participant analysis (Fig. 7). High
Figure 6: Scanned area measures (n=14 participants) versus
trials for a. high performers (F (2, 107) = 7.419, p=.001), b.
low performers, (F (2,143) =3.501; p= .033).
performers (n=6) revealed the expected task
performance progress, whereas low performers’
(n=8) task performance did not improve between
initial and final trials.
The preliminary analysis for the fNIRS
measures was to investigate the measures from the
prefrontal cortex (PFC) region area associated with
attention. We calculated oxygenation changes for low
and high performers using MBLL. We hypothesized
that the high performers would have higher
oxygenation than low performers’ levels. Figure 9
depicts oxygenation changes from Optode 11 located
over the middle frontal gyrus of the right hemisphere
Real 2018 - Special Session on Assessing Human Cognitive State in Real-World Environments
290
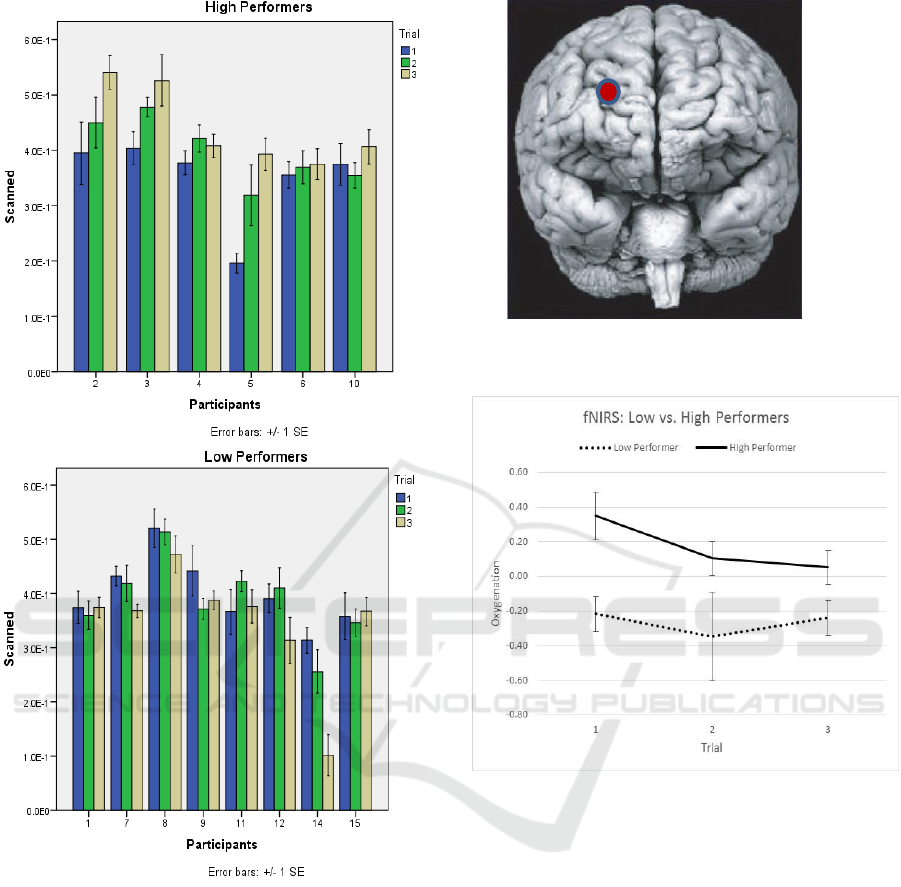
Figure 7: Performance measures by participant.
that was previously reported for the attention task
studies (Izzetoglu M, 2007). The oxygenations
changes were higher for the high performers as their
scanning performance improved over 3 trials.
On the other hand, low performers oxygenation
changes remained low, which would be expected
when we observe their scanning task performance.
However, a low oxygenation does not always mean a
lack of cognitive effort. For example, we found that
the high performers’ oxygenation levels decreased as
they became more proficient over time whilst
performing the scanning task. A finding that has
previously been reported using fNIRS when assessing
Figure 8: Approximate area of activation region related to
the task reported here- fNIRS oxygenation changes.
Figure 9: fNIRS results for the low and high performers.
(F= 3.095, p=.083 for high performers between initial trial
and final trial. For low performers, F<1).
unmanned and manned pilots while they were
acquiring new skills (Ayaz et al., 2012; Hernandez, et
al., 2015; Izzetoglu, et al 2014; Menda, et al., 2011).
Thus a similar trend was observed here for the high
performers. That is, while you become familiar with
the task, the oxygenation levels at the PFC region
decreased. This was not seen in the low performers
during this study. There was no significant
differences between final and initial trials for this
group.
Right
Left
Using Functional near Infrared Spectroscopy to Assess Cognitive Performance of UAV Sensor Operators during Route Scanning
291

4 DISCUSSION
The ability of a UAV crew to conduct effective
operations is based to a large extent on their training.
The role of the SO is critical in determining the
success of a mission and rapid decision making must
often be made in a timely manner, and sometimes
calls upon greater demand of attentional resources.
This is particularly true of missions that require both
rapid response to a changing environment, and also
missions where vigilance may result in mental fatigue
(and increased likelihood of human error). It is
essential therefore that training regimes for operators
takes these factors into account and in many cases this
will often rely upon high fidelity simulation and
scenario-based mission tasks. However, the
evaluation techniques currently being used to assess
such training tends to focus on behaviour markers
related to task, rather than the cognitive ability of the
operator. This study builds on the knowledge that we
have already gathered by using other functional
neurological imaging techniques (such as MRI, EEG)
and harnessed the utilisation of fNIRS within a field-
based study to demonstrate the benefits this form of
measurement may have when assessing operator
cognitive state. Further, there are vast amounts of
research reported fNIRS studies in the aerospace
domain. The training effect and expertise
development for manned aircraft pilots was studied
with the fNIRS and reported oxygenation decrease on
PFC (Hernandez, et al., 2015). Cognitive workload of
air traffic controllers was measured by using fNIRS
and explored assessment of working memory from
the PFC (Ayaz, et al., 2012). Further, we studied
UAV pilots on landing and approach task while
measuring the expertise development via fNIRS
(Izzetoglu, et al., 2014; Ayaz, et al., 2012).
The current study identified that as participants
acquired knowledge and gained new skills we are
able to observe how they draw on oxygenation to
increase their cognitive effort associated with
different elements localised within the PFC. On
closer inspection this localised oxygenation change is
associated with parts of the PFC closely aligned with
the middle frontal gyrus of the right hemisphere
associated with attention.
The experimental protocol reported here was very
complex task. Although these results, behavioural
and neuro-physiological measures, are in line with
previous reports, one should conduct further analysis
for all the sub-tasks for the payload operators and
investigate fNIRS measures acquired from all the
PFC regions for each sub-task and overall task
performance.
This study has demonstrated the benefit of
utilising fNIRS as a biomarker for cognitive function
of participants employed in conducting UAV sensor
operator tasks. While it has highlighted the nature of
cognitive function within the PFC, it also can be used
as an evaluation of expertise during multiple training
sessions.
ACKNOWLEDGEMENTS
The authors express their gratitude to Shahar Kosti
for his valuable review and support for scenario
design, UAV simulator setup and behavioral data.
The authors also would like to thank Simlat, Inc for
providing access to their UAV training simulator.
REFERENCES
Ayaz H, Shewokis PA, Bunce S, Izzetoglu K, Willems B,
Onaral B. (2012). Optical brain monitoring for operator
training and mental workload assessment. Neuroimage,
59(1):36-47. PMID: 21722738.
Cooke, N. J., & Shope, S. M. (2004). Designing a synthetic
task environment. In Schiflett, S. G.
Cope, M., and Delpy, D. T. (1988). System for long-term
measurement of cerebral blood flow and tissue
oxygenation on newborn infants by infra-red
transillumination. Med. Biol. Eng. Comput., 26: 289–
294.
Hernandez-Meza, G., Slason, L., Ayaz, H., Craven, P.,
Oden, K., & Izzetoglu, K. (2015). Investigation of
Functional Near Infrared Spectroscopy in Evaluation
of Pilot Expertise Acquisition. In D. D. Schmorrow &
C. M. Fidopiastis (Eds.), Foundations of Augmented
Cognition (Vol. 9183, pp. 232-243): Springer
International Publishing.
Izzetoglu, K., Bunce, S., Onaral, B., Pourrezaei, K.,
Chance, B (2004) Functional optical brain imaging
using near-infrared during cognitive tasks.
International Journal of Human-Computer Interaction
17, 211-227 (2004)
Izzetoglu, K., Ayaz, H., Hing, J., Shewokis, P., Bunce, S.,
Oh, P., & Onaral, B. (2014). UAV Operators Workload
Assessment by Optical Brain Imaging Technology
(fNIR). In K. P. Valavanis & G. J. Vachtsevanos (Eds.),
Handbook of Unmanned Aerial Vehicles (pp. 2475-
2500): Springer Netherlands
Izzetoglu M, Bunce S, Izzetoglu K, Onaral B, Pourrezaei K
(2007). Functional Brain Imaging Using Near Infrared
Technology for Augmented Cognition. IEEE Eng. in
Med. and Biol. Mag., Special issue on The Role of
Optical Imaging in Augmented Cognition, 26(4):38 –
46.
Real 2018 - Special Session on Assessing Human Cognitive State in Real-World Environments
292

Jobsis, F.F (1997) Noninvasive, infrared monitoring of
cerebral and myocardial oxygen sufficiency and
circulatory parameters. Science 198, 1264-1267
Kenner, N., & Wolfe, J. M. (2003). An exact picture of
your target guides visual search better than any other
representation. Journal of Vision, 3, 230a.
Kirton, M.J. (2003) Adaptation and innovation in the
context of diversity and change Routledge, London
Kowalski-Trakofler, K. M., & Barrett, E. A. (2003). The
concept of degraded images applied to hazard
recognition training in mining for reduction of lost-time
injuries. Journal of Safety Research, 34, 515-525.
Menda, J., Hing, J.T., Ayaz, H., Shewokis, P.A., Izzetoglu,
K., Onaral, B., Oh, P. (2011) Optical Brain Imaging to
Enhance UAV Operator Training, Evaluation, and
Interface Development. J. Intell. Robotics Syst. 61,
423-443 (2011)
Obrig, H., Villringer, A (1997) Near-infrared spectroscopy
in functional activation studies. Can NIRS demonstrate
cortical activation? Advances in Experimental Medicine
and Biology 413, 113-127
Treisman, A., Vieira, A., & Hayes, A. (1992).
Automaticity and Preattentive Processing. The
American Journal of Psychology,105(2), 341-362.
Villringer A, Chance B (1997). Non-invasive optical
spectroscopy and imaging of human brain function.
Trends in Neuroscience, 20:435-442.
Wickens, C.D., Dixon, S., Goh, J., & Hammer, B.
(2005). Pilot dependence on imperfect diagnostic
automation in simulated UAV flights: An attentional
visual scanning analysis. In Proceedings of the 13th
International Symposium on Aviation Psychology (pp.
919-923). Columbus, OH: Association of Aviation
Psychology
Williams, K.W (2004) A summary of unmanned aircraft
accident/incident data: human factors implications.
U. S. Department of Transportation Report, No.
DOT/FAA/AM—04/24 (2004)
Wolfe, J. M., Horowitz, T. S., & Kenner, N. M. (2005).Rare
items often missed in visual searches. Nature, 435, 439-
440.
Using Functional near Infrared Spectroscopy to Assess Cognitive Performance of UAV Sensor Operators during Route Scanning
293
