
Physiologically Attentive User Interface for Robot Teleoperation
Real Time Emotional State Estimation and Interface Modification using
Physiology, Facial Expressions and Eye Movements
Gaganpreet Singh
1
, Sergi Bermúdez i Badia
1,2
, Rodrigo Ventura
3
and José Luís Silva
1,4
1
Madeira-ITI, Universidade da Madeira, Funchal, Portugal
2
Faculdade de Ciências Exatas e da Engenharia, Universidade da Madeira, Funchal, Portugal
3
Institute for Systems and Robotics, Instituto Superior Técnico, Universidade de Lisboa, Lisboa, Portugal
4
Instituto Universitário de Lisboa (ISCTE-IUL), ISTAR-IUL, Lisboa, Portugal
Keywords: Psychophysiology, Biosignals, Bitalino, Robot Teleoperation, Facial Emotions, Electroencephalography,
Electrocardiogram, Electrodermal Activity, Electromyography, Eye Tracking, Sikuli, Picture-driven
Computing, Automation, ISI, Emotions.
Abstract: We developed a framework for Physiologically Attentive User Interfaces, to reduce the interaction gap
between humans and machines in life critical robot teleoperations. Our system utilizes emotional state
awareness capabilities of psychophysiology and classifies three emotional states (Resting, Stress, and
Workload) by analysing physiological data along with facial expression and eye movement analysis. This
emotional state estimation is then used to create a dynamic interface that updates in real time with respect to
user’s emotional state. The results of a preliminary evaluation of the developed emotional state classifier for
robot teleoperation are presented, along with its future possibilities are discussed.
1 INTRODUCTION
Due to many fold increase in computing capabilities,
we have seen tremendous evolution in Human-
Computer Interaction (HCI). And through
technological improvements and robotics evolution;
we are witnessing another form of interaction which
is between Humans and Robots; and widely known
as Human-Robot Interaction (HRI). No matter if it is
HCI or HRI, the ways we are interacting with
machines have evolved to such an extent that
science is now looking for methods that help
understand human intentions without much need of
physical input from humans.
From the emergence of computers to the
development of personal computers, and then
becoming an ubiquitous entity, the relationship
between humans and computers shifted from many-
to-one to one-to-one, and now it is one-to-many.
This technological shift brings in the demand for
smarter Human-Computer Interfaces.
To optimize HCI, Vertegaal (2003) proposed a
framework for Attentive User Interfaces (AUI). AUI
uses sensing, communication, augmentation, control,
and availability of human to strategically optimize
communication between Humans and Machines.
AUIs designed by different authors (Vertegaal,
2003; Siewiorek et al., 2003; Vertegaal et al., 2006)
use sociable forms of interaction by sensing user’s
attention levels for their surroundings and more
preciously for the Interface itself.
However, current AUIs depend on overt
measurements of user's attention, such as eye
contact, which may not always accurately indicate
user’s availability for notifications or interruptions.
Although overt measures of user’s attention may tell
us that a user is performing a given task, they do not
necessarily indicate the covert state of mind.
Due to this one-to-many relationship between
humans and computer systems, traditionally
designed approaches are not capable enough to
convey information from these devices to humans in
a precisely uninterrupted way. On the opposite, these
information hungry devices trigger un-timely
notifications and information delivery, and they are
becoming heavier and more demanding with time
(Dirican & Gokturk, 2009).
294
Singh, G., Badia, S., Ventura, R. and Silva, J.
Physiologically Attentive User Interface for Robot Teleoperation - Real Time Emotional State Estimation and Interface Modification using Physiology, Facial Expressions and Eye Movements.
DOI: 10.5220/0006733002940302
In Proceedings of the 11th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2018) - Volume 4: BIOSIGNALS, pages 294-302
ISBN: 978-989-758-279-0
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Alongside, robot teleoperation also caught into
this attention’s demand created by interface and
robot operations. This eventually creates lots of
workload and stress on operators, and sometimes
operators also experience boredom, interest loss, and
focus issues. Drones like Global Hawks from US Air
Force have such a sophisticated system that they
need more attention and mental presence than
normally flying a plane. In other situations these
drones do not require attention and mental focus
every single time, which creates windows of
unawareness and lack of attention which decreases
performance and could cause problems. Secondly,
the complexity of these systems could be very high
in some situations, leading to very high mental
workload and induced stress on operators.
Fortunately, we have improved cognitive
abilities to understand covert emotional states that
are particularly not possible for current Graphic User
Interfaces (GUIs) or Attentive User Interfaces
(AUIs) (Dirican & Göktürk, 2011).
Psychophysiological activities provide a quiet,
hidden, and implicit way to understand cognitive
and affective states of users with respect to their
mind-body relationship (Dirican & Göktürk, 2011).
Human physiology is highly affected by the activity
of the Central Nervous System (CNS) and the
Autonomic Nervous System (ANS), and reflects
physiology in the form of physical signals generated
by human body in real time (Sapa, 2011; Dirican &
Göktürk, 2011), which could be helpful in telling
emotional state of a person.
We explored the field of Psychophysiology to
understand covert states of human mind alongside
integrated this with overt measurements of facial
expressions and eye movements, and prepared an
Artificially Intelligent system to precisely detect
three Emotional states (Resting, Stress, and
Workload).
These emotional predictions were then used in
real time to create a Physiologically Attentive User
Interface (PAUI) that changes dynamically with
respect to the emotional state of the person in real
time.
However, this generated PAUI developed over
an older GUI to reduce the complexity (e.g. reducing
the amount of information provided) and to increase
both usability and development flexibility for a
closed system. In which the older GUI was a frozen
12 years old interface with very complex user
interaction and feedback view. This new interface
reduces the complexity of the older one by
displaying only the more relevant information
(reducing unnecessary user’s cognitive overload)
and updates itself in real time with respect to the
emotional state of the person. In addition, it will also
communicate with the older GUI, via a picture-
driven computing approach e.g. (Silva et al., 2016),
to eliminate the need of creating a new interactive
system from scratch.
Following in this paper we have discussed
current state of physiologically driven interfaces and
Human-Machine interactions. Then explained the
solution we developed for PAUI creation and the
framework designed. Then next, emotion
classification processes, experiments, and there
results are discussed. It is then followed by the
conclusion and its future perspective.
2 REVIEW
Due to emotional state awareness capabilities of
Psychophysiological measures, they are catching lot
of attention these days in areas like Autonomous
systems, Military, Medicine, among others. Few of
them relevant to the project were studied and their
findings are discussed below.
Bulling (2016) provides an analytical and
projective view on current and future aspects of User
Interfaces, with an insight to the possibilities and
requirements for Pervasive Attentive User
Interfaces. User interfaces will shift their focus from
being an attention demanding to attention managing
systems; interfaces adapt for amount, type, and time
of information delivery on the basis of current
attention capacities of the users. Bulling (2016)
defined Unobtrusiveness, Accuracy, Large scale,
Long-lividness, Seamlessness, and Context
awareness are 6 important categories that defines
new Pervasive Attentive User Interfaces.
Chen & Vertegaal (2004) used LF spectral
components for mental workload and analyzed EEG
for motor activity to find four distinguish states of
user, and use them to predict the availability of the
user for interrupts. These four states have
interruption costs for speech and motor related
activities. And by using user’s physiological state
and cost of interruption (calculated by user’s
preferences for mode of interrupt for email, IM, and
calls in all four states), system decides if the user has
to be interrupted or not. First state of this system
exhibits very lower degree of attention, in which
user is not actively engaged with any task and could
be interrupted for having relatively very low
interruption cost. However, this was not generalized
with other relaxing states where interruption cost
could be high. Second state has low interruption cost
Physiologically Attentive User Interface for Robot Teleoperation - Real Time Emotional State Estimation and Interface Modification using
Physiology, Facial Expressions and Eye Movements
295

for audio related interrupts but has high interruption
cost for motor related interrupts like messaging. This
state is associated with transit activities like walking
or running. Third state is mental engagement while
at rest which results into high cost for auditory
interrupts that could interface with mental state of
the user. And the fourth state is of higher activity
engagement in which interrupt cost of any kind is
high and should not be disturbed.
A Human-Computer Interface (HCI) was
developed by (Chapin et al., 1999; Wessberg, 2000)
in Duke University to establish communication
between a Monkey’s brain and a Robot arm. To
achieve this communication they used multiple EEG
electrodes implanted over a greater area of monkey’s
brain. Neural activity of large population of
monkey’s brain was recorded and then decoded the
arm movements out of them. This information was
then used to reproduce the movements in robot arm.
Another example of Brain-Machine
communication was demonstrated jointly by Honda
Research Institute Japan, Advanced
Telecommunications Research Institute International
(ATR) and Shimadzu Corporation in March 2009, in
which a Robot was controlled only by Human
thoughts. They measured electric signals and blood
flow changes in the brain while imagining body part
movements and used these to predict user’s thought
process. These predicted motions are then supplied
to Honda’s ASIMO humanoid robot to perform
similar movements like raising its arm. More than
90% of accuracy rate was achieved (Zhang et al.,
2010).
Caproni et al. (2009) has developed a
comprehensive hemodynamic pattern classification
framework to enhance Human-Robot Interaction
(HCI) for medical robotics using Near-Infrared BCI.
Caproni et al. (2009) studied different simulations
for Motor Imagery (MI) and Non-Motor Imagery
(NMI) frameworks. Simulation combinations
depends on three channel combinations i.e. left,
right, and all channels; two classifier i.e. Support
Vector Machine (SVM) and AdaBoost; and three
aggregation policies i.e. Majority Voting, Weighted
Majority Voting, and Correcting Classifiers. Out of
which they found NMI as a best performer. After
scrutinizing all of their experiments and their results,
Caproni et al. (2009) concluded Near InfraRed
Spectroscopy (NIRS) based Brain Computer
Interfaces has a huge potential to help enhance
existing Human-Machine Interfaces.
3 PAUI
3.1 Approach
We created a basic Physiologically Attentive User
Interface (PAUI) to read and understand user’s
Psychophysiology in real time with an intention to
classify three different emotional states (Resting,
Stress, and Workload) of a person while
teleoperating a robot. These classification results are
then use to change the interface in such a way that
improves user performance in the task and ease the
process of robot teleoperation.
3.2 Apparatus Used and Placement
We are using Bitalino by Plux (Bitalino, 2017) for
reading biosignals that are Electroencephalography,
Electrocardiogram, Electrodermal activity, and
Electromyography. For eye tracking, we use Tobii
4c from Tobii Technologies (Tobii Technologies,
2017) and a normal webcam to extract facial
emotions.
Once the person is at the station s(he) will be
attached with Ag/AgCl electrodes under right
clavicula (Plus), under left musculus pectoralis
major (Minus), and under left clavicula (Neutral) for
ECG’s best suggested placement by (Němcová et al.,
2016); for EDA two electrodes were used on left
palm; for EMG negative and positive electrode are
placed at Abductor pollicis brevis muscle of left
hand and reference electrode at left arm’s Head of
ulna; and for EEG negative and positive electrodes
were placed at forehead and reference electrode at
left earlobe.
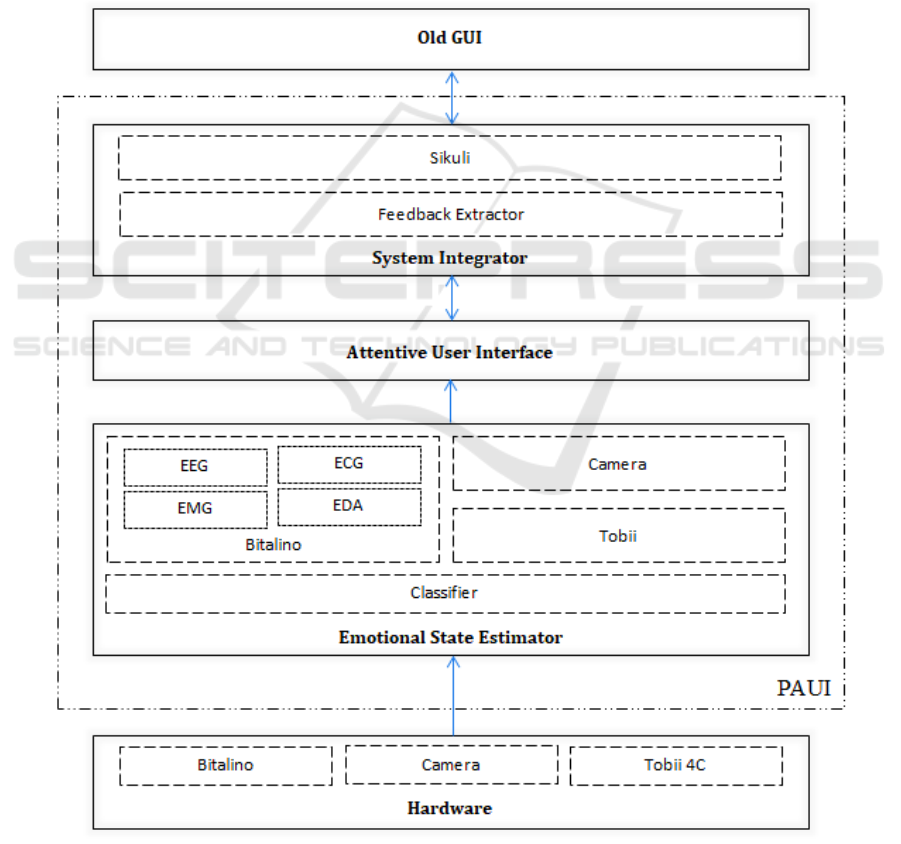
3.3 Architecture
PAUI application’s architecture shown in figure 1 is
divided into three sub modules that work alongside
to achieve overall goal of creating Physiologically
Attentive User Interface (PAUI) for robot
teleoperation. The three sub modules are Emotional
State Estimator (ESE), Attentive User Interface
(AUI), and System Integrator (SI).
ESE interacts with external hardware modules to
extract covert and overt data of the user and process
that for emotion prediction. This predicted emotional
state is then fed to AUI that makes changes to its
interface with respect to that. And SI is helping in
filling the communication gap between old GUI and
new PAUI. Moreover, communication between
Hardware layer – ESE and ESE – AUI is one way,
but between AUI – SI and SI – Old GUI is two way.
Real 2018 - Special Session on Assessing Human Cognitive State in Real-World Environments
296
3.3.1 Emotional State Estimator (ESE)
This module is sub divided into 4 parallel
threads: Bitalino thread extracts data at 1000 Hz for
processing physiological signal; Camera thread
processes camera images and extracts facial
emotions at 15 Hz; Tobii thread extracts data at 90
Hz for tracking eye movements; and the Classifier
thread runs at 2000 Hz that reads data from Bitalino,
Camera, and Tobii thread, and performs emotion
extraction and provides predicted emotion.
Bitalino thread processes ECG signal for Heart
Rate (HR), Heart Rate Variability i.e. Standard
Deviation of Normal to Normal (SDNN) and Root
Mean Square of the Successive Differences
(RMSSD), and Frequency components i.e. Very
Low Frequency (VLF from 0.0033 to 0.04), Low
Frequency (LF from 0.04 to 0.15 Hz), and High
Frequency (HF from 0.15 to 0.4 Hz). It processes
EEG for Delta (0.5 – 3.5 Hz), Theta (3.5 – 8 Hz),
Alpha (8 – 13 Hz), Beta (13 – 30 Hz), Gamma (30 –
45 Hz), and Engagement (Engagement = Beta /
(Alpha + Theta)) suggested by McMahan et al.
(2015). Processes EDA for Skin Conductance Level,
Skin Conductance Response. And EMG is processed
for Muscle Fiber Excitation (MFE). Table 1 contains
the list of parameters extracted from each device.
The camera thread uses common webcam and
Emotion SDK from Affectiva (Affectiva, 2017) to
processes image frames and extracts emotions from
Figure 1: PAUI Architecture.
Physiologically Attentive User Interface for Robot Teleoperation - Real Time Emotional State Estimation and Interface Modification using
Physiology, Facial Expressions and Eye Movements
297
faces present in the frames. In that we are extracting
9 facial emotions, 21 facial expressions, and facial
orientation information.
Tobii thread is continuously monitoring eye
movements on the screen and keeps on updating
custom designed data set for fixations map on the
screen. It contains comprehensive information of
fixation map like average fixation, biggest fixation
at, among fixation specific information like number
of fixations at particular location, fixation coming
from and fixation going to, and so on.
Classifier thread works above all three threads, it
takes data from them approximately every 500 micro
seconds, do the average of data of 3 seconds and use
this averaged data with trained Support Vector
Machine (SVM) classifier for Emotion prediction
out of three trained emotional states (i.e. Resting,
Stress, and Workload).
Table 1: Extracted parameters from all three sensors.
Sensor
Category
Features
Bitalino
ECG
▪ HR
▪ SDNN
▪ RMSSD
▪ VLF
▪ LF
▪ HF
EEG
▪ Delta
▪ Theta
▪ Alpha
▪ Beta
▪ Gamma
▪ Engagement
EMG
▪ Number of Peaks
▪ Total Peak Time
▪ Max Peak Magnitude
▪ Current Peak Magnitude
EDA
▪ SCL
▪ SCR
Tobii
General Fixation
Information
▪ Number of Fixations
▪ Total Time
▪ Total Fixation Duration
▪ Average Fixation
Duration
▪ Repeated Fixations
▪ Biggest Fixation At
▪ Maximum Visited Counts
▪ Maximum Visited At
Fixation Map
*Containing
information for
each fixation
▪ Number of Visits
▪ Start Time
▪ Fixation Duration
▪ Total Fixation Duration
▪ Total Interval Between
Visits
▪ List of Locations Coming
From and its count
▪ List of Locations Going
To and its count
Camera
Emotions
▪ Joy
▪ Fear
▪ Disgust
▪ Sadness
▪ Anger
▪ Surprise
▪ Contempt
▪ Valence
▪ Engagement
Expressions
▪ Smile
▪ Inner Brow Raise
▪ Brow Raise
▪ Brow Furrow
▪ Nose Wrinkle
▪ Upper Lip Raise
▪ Lip Corner Depressor
▪ Chin Raise
▪ Lip Pucker
▪ Lip Press
▪ Lip Suck
▪ Mouth Open
▪ Cheek Raise
▪ Dimplier
▪ Eye Widen
▪ Jaw Drop
▪ Lip Tighten
▪ Lip Stretch
▪ Smirk
▪ Eye Closure
▪ Attention
Face Orientation
▪ Pan
▪ Tilt
▪ Yaw
3.3.2 Attentive User Interface (AUI)
This is the interactive interface with which user is
meant to interact and it changes with respect to users
psychophysiological state predicted by Emotional
State Estimator (ESE). It keeps on reading
psychophysiological state predicted by ESE along
with data provided by Tobii, and performs required
changes in its design along with sending required
operations to SI for old GUI.
3.3.3 System Integrator (SI)
System Integrator (SI) is the communication bridge
between new Physiologically Attentive User
Interface (PAUI) and any old GUI (used for robot
teleoperation in our example, figure 2). It needs to
perform two basic functionalities in between PAUI
and old GUI. One is to extract data from old GUI in
a reliable and continuous manner to provide working
information to the user (Feedback Extractor sub-
layer). And secondly, it needs to take action
commands from AUI and perform required activities
Real 2018 - Special Session on Assessing Human Cognitive State in Real-World Environments
298

on old GUI using Sikuli’s task automation properties
(Sikuli sub-layer).
Figure 2: Old GUI for robot teleoperation.
3.4 Experiment Setup
3.4.1 Virtual Environment Experiments
Experiments were divided into two categories:
Virtual Environment and Robot Teleoperation. To
get initial understanding of the data and to perform
preliminary tests, we created a virtual setup using
games that help generating emotional stimulus in
subjects.
In virtual environment experiments the subject
were given 2 minutes of relaxing time in the
beginning, afterwards s(he) needs to perform
Relaxing task for 5 minutes. It was then followed by
self-assessment in NASA-TLX and SAM.
Afterwards, the person was either put on Workload
or Stress task randomly.
In the Workload task, subjects were asked to
perform 3 tasks in Rigs of Rods (Rigsofrods.org,
2017) for 5 minutes each, in which difficulty was
increased linearly. These 3 sessions of workload
were separated by 0.30 minute of break and self-
assessment on NASA-TLX.
The Stress test is also divided into 3 sessions on
a modified Tetris game to make it very hard for
whole time play. All three sessions of Stress were
separated by 0.30 minutes of self-assessment on
SAM and break alongside.
After finishing first session of Workload or
Stress task, subjects were introduced to Relaxing
session for 5 minutes and then again put on either
Workload or Stress task. The Workload and Stress
sessions were pseudo randomized in such a way that
if the first session is of Workload then the second
should be of Stress and same should be other way
around.
3.4.2 Robot Teleoperation Experiments
After conducting preliminary experiments on virtual
environments, we performed experiments on robot
teleoperation while imitating search and rescue
operations of Fire fighters.
In which Resting was performed by driving the
robot from one end to other end in a long room for
five minutes at minimum speed, to simulate
inactivity and lack of mental and physical demand.
Then in the Stress task subjects need to teleoperate
the robot through a very difficult environment and
have to finish this task within 5 minutes. And in the
Workload task, subjects have to search for five items
in the environment alongside answering basic
arithmetic operations.
However, to keep things unbiased we
randomized the whole testing procedure. Each
subject has to perform 2 sessions of each task in a
randomly controlled way. A home like test setup
was used for the experiments that contains a
bedroom, living room, and a Kitchen; installed in
our lab. Alongside, this home like test setup, we also
used some parts of the lab for these experiments.
And for Stress tests, 2 specially designed areas in the
lab were used to intensify task difficulty and to
elevate stress.
Figure 3: Graph containing engagement data from resting test in virtual environment experiments, in which engagement
value shows very less intensity.
Physiologically Attentive User Interface for Robot Teleoperation - Real Time Emotional State Estimation and Interface Modification using
Physiology, Facial Expressions and Eye Movements
299
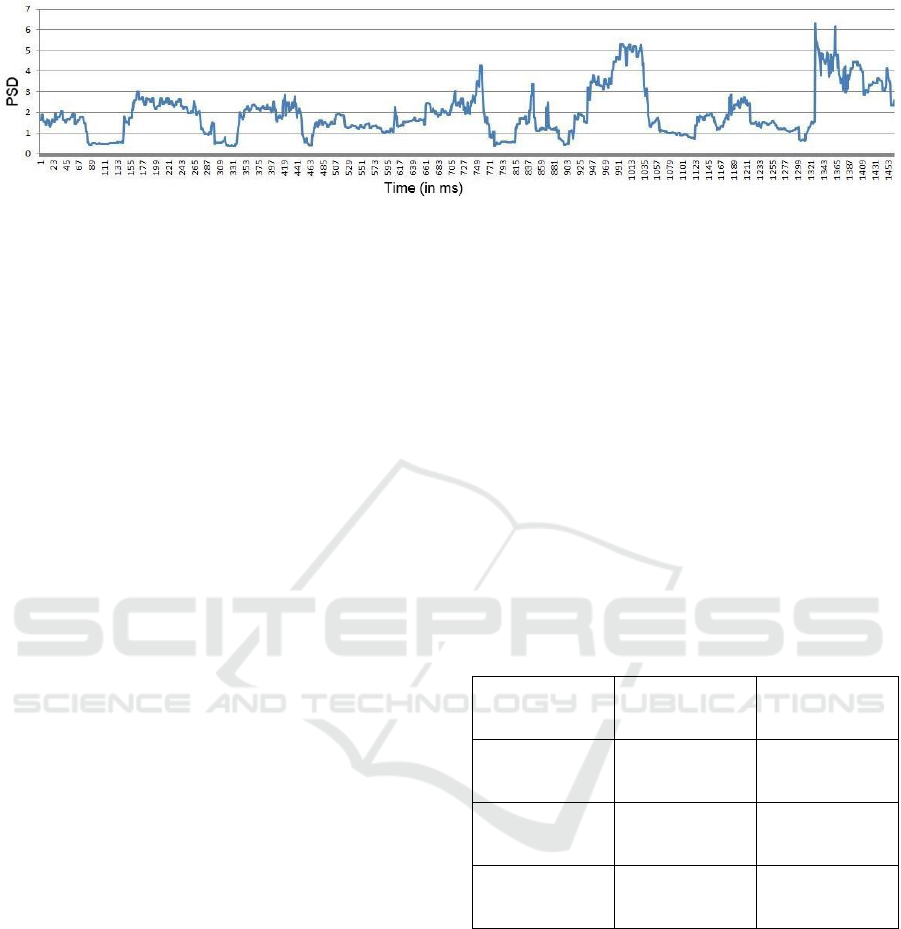
Figure 4: Graph containing engagement data from stress test in virtual environment experiments, in which engagement
value shows very high intensity.
After attaching all required electrodes and test
them thoroughly, each subject then put onto
realisation session, in which they introduced with
the tests and robot controls, and let them play with
the robot for five minutes. Then out of 6 sequential
combinations of resting, stress, and workload test, a
random combination was chosen and performed
with five minutes of wash away time in between
each session, in which they also needed to fill
NASA-TLX questionnaire for workload and 5 scale
Self-Assessment Manikin (SAM) containing
Valence and Arousal for stress. After completing the
combination of three tests, another combination was
selected out of remaining 5 combinations. Then for
the next subject only remaining combinations were
used and this continued until all 6 combinations
were used.
As proof of concept for this project, five subjects
participated and performed two sessions of each task
(Resting, Stress, and Workload) by each subject.
4 CLASSIFICATION AND
RESULTS
For benchmarking of our system we performed K-
Nearest Neighbour (KNN) and Support Vector
Machine (SVM) classification on data from both
Virtual Environment Experiments (VEE) and Robot
Teleoperation Experiments (RTE). And out of all
extracted features we used 46 features (without
normalization or scaling) for each vector space
As the physiological data is dependent on task
and varies from person to person, we try to evaluate
both the conditions. The data from VEE and RTE
were arranged into three different categories: Task
Specific (Gaming and Teleoperation) and Person
Specific, which then classified and evaluated.
In Task Specific, data from VEE and RTE were
trained and tested separately with SVM and KNN. In
which, 70% of VEE data was used for training SVM
and KNN and remaining 30% of VEE data was used
for testing, similar training and testing percentage
was used with RTE data. Thus the classification
results of SVM outperformed KNN in both the tasks.
With VEE data SVM gave 80.00% of accuracy and
KNN gave 77.63% of accuracy. And with RTE data
SVM gave 84.75% of accuracy and KNN gave
79.84% of accuracy.
In Person Specific, data of single subject from
RTE was used. In which, both SVM and KNN were
trained with 70% data and tested with remaining
30% of data. As the data represent only one single
person, classifiers performed relatively better than
Task Specific, and gave 88.37% of accuracy by
SVM and 82.95% of accuracy by KNN. Please refer
table 2 for classification results.
Table 2: Classification Results.
DATA
SVM
KNN
Task Specific
(VEE)
80.00%
77.63%
Task Specific
(RTE)
84.75%
79.84%
Person Specific
88.37%
82.95%
As we conducted a validatory research, to
support the framework for Physiologically Attentive
User Interface, small amount of training data was
used which may have interfered with the
classification accuracy. Nevertheless, SVM gave
expectedly good results to support the framework for
real time emotional state processing.
Alongside, the engagement data from resting and
stress tests conducted in virtual environment
experiments shows clear differences in the patters
and intensity in both the measurements. Intensity of
engagement value in stress test is relatively very
Real 2018 - Special Session on Assessing Human Cognitive State in Real-World Environments
300

high as compared to resting, and it also stayed high
in whole stress session, shown in figure 3 and 4.
5 CONCLUSIONS AND FUTURE
PERSPECTIVE
User’s psychophysiological state was measured and
predicted in real time and autonomy is provided to
the system to improve its interface dynamically with
respect to the mental workload and stress level on
the user. A PAUI was created, that performs
dynamic updations to its interface and helps in
decelerating the effects of workload and stress.
Moreover, the classification findings are quite
impressive. We have explored different aspects of
psychophysiology and combined them with external
emotional and attentional clues. Getting 88.37% of
accuracy in Person specific data and 84.75%
accuracy in Task specific data with this small
amount of training samples gives a valid indication
of having huge potential of improvement.
Current findings clearly suggest that the use of
Deep learning techniques could be a promising
measure to achieve higher degree of accuracy in
emotion classification.
Future aspects of this research are with the
improvements in emotion classification techniques
with current state of the art classifiers. One
important field to scrutinize is with Recurrent Neural
Networks that could be helpful in understanding the
changing patterns of the data and make prediction on
them. And to introduce more emotional states for
classification which helps in bring more dynamicity
and understandability to PAUI.
ACKNOWLEDGEMENTS
This work was supported from Fundação para a
Ciência e a Tecnologia (FCT, Portugal), through
project UID/EEA/50009/2013.
REFERENCES
Affectiva. 2017. SDK & API. [online] Available at:
https://www.affectiva.com/product/emotion-sdk/
[Accessed 7 Nov. 2017].
Bitalino, 2017. EEG Sensor | Biomedical Sensors |
BITalino Board Kit. [online] Bitalino.com. Available
at: http://bitalino.com/en/plugged-kit-bt [Accessed 7
Nov. 2017].
Bulling, A., 2016. Pervasive Attentive User
Interfaces. IEEE Computer, 49(1), pp.94-98.
Caproni, M., Orihuela-Espina, F., James, D.R., Menciassi,
A., Dario, P., Darzi, A.W. and Yang, G.Z., 2009,
October. An analysis framework for near infrared
spectroscopy based brain-computer interface and
prospective application to robotic surgery.
In Intelligent Robots and Systems, 2009. IROS 2009.
IEEE/RSJ International Conference on(pp. 2143-
2148). IEEE.
Chapin, J.K., Moxon, K.A., Markowitz, R.S. and
Nicolelis, M.A., 1999. Real-time control of a robot
arm using simultaneously recorded neurons in the
motor cortex. Nature neuroscience, 2(7), pp.664-670.
Chen, D., 2006. The Physiologically Attentive User
Interface Towards A Physiological Model of
Interruptability (pp. 2836-2836). Queen's University.
Chen, D. and Vertegaal, R., 2004, April. Using mental
load for managing interruptions in physiologically
attentive user interfaces. In CHI'04 extended abstracts
on Human factors in computing systems (pp. 1513-
1516). ACM.
Dirican, A.C. and Gokturk, M., 2009. Attentive
computing. In Human-Computer Interaction. InTech.
Dirican, A.C. and Göktürk, M., 2011. Psychophysiological
measures of human cognitive states applied in human
computer interaction. Procedia Computer Science, 3,
pp.1361-1367.
McMahan, T., Parberry, I. and Parsons, T.D., 2015.
Evaluating player task engagement and arousal using
electroencephalography. Procedia Manufacturing, 3,
pp.2303-2310.
Němcová, A., Maršánová, L. and Smíšek, R., 2016
RECOMMENDATIONS FOR ECG ACQUISITION
USING BITALINO.
Rigsofrods.org. 2017. Rigs of Rods Soft Body Physics
Simulator. [online] Available at: https://rigsofrods.org/
[Accessed 7 Nov. 2017].
Sapa, M., 2011. Psychological state estimation from
physiological recordings during robot-assisted gait
rehabilitation. Journal of rehabilitation research and
development, 48(4), p.367.
Siewiorek, D.P., Smailagic, A., Furukawa, J., Krause, A.,
Moraveji, N., Reiger, K., Shaffer, J. and Wong, F.L.,
2003, October. SenSay: A Context-Aware Mobile
Phone. In ISWC (Vol. 3, p. 248).
Silva, J.L., Ornelas, J.D. and Silva, J.C., 2016, June. Make
it ISI: interactive systems integration tool.
In Proceedings of the 8th ACM SIGCHI Symposium
on Engineering Interactive Computing Systems (pp.
245-250). ACM.
Tobii Technologies. 2017. Get your Tobii Eye Tracker 4C.
[online] Available at: https://tobiigaming.com/eye-
tracker-4c/ [Accessed 7 Nov. 2017].
Vertegaal, R., 2003. Attentive user
interfaces. Communications of the ACM, 46(3),
pp.30-33.
Vertegaal, R., Shell, J.S., Chen, D. and Mamuji, A., 2006.
Designing for augmented attention: Towards a
Physiologically Attentive User Interface for Robot Teleoperation - Real Time Emotional State Estimation and Interface Modification using
Physiology, Facial Expressions and Eye Movements
301

framework for attentive user interfaces. Computers in
Human Behavior, 22(4), pp.771-789.
Wessberg, J., Stambaugh, C.R., Kralik, J.D., Beck, P.D.,
Laubach, M., Chapin, J.K., Kim, J., Biggs, S.J.,
Srinivasan, M.A. and Nicolelis, M.A., 2000. Real-time
prediction of hand trajectory by ensembles of cortical
neurons in primates. Nature, 408(6810), pp.361-365.
Zhang, B., Wang, J. and Fuhlbrigge, T., 2010, August. A
review of the commercial brain-computer interface
technology from perspective of industrial robotics.
In Automation and Logistics (ICAL), 2010 IEEE
International Conference on(pp. 379-384). IEEE.
Real 2018 - Special Session on Assessing Human Cognitive State in Real-World Environments
302
