
Experimental Evaluation of Point Cloud Classification using the PointNet
Neural Network
Marko Filipovi
´
c, Petra Ðurovi
´
c and Robert Cupec
Faculty of Electrical Engineering, Computer Science and Information Technology Osijek,
J. J. Strossmayer University, 31000 Osijek, Croatia
Keywords:
Point Cloud, Point Set, Point Cloud Classification, PointNet, RGB-D, Depth Map.
Abstract:
Recently, new approaches for deep learning on unorganized point clouds have been proposed. Previous appro-
aches used multiview 2D convolutional neural networks, volumetric representations or spectral convolutional
networks on meshes (graphs). On the other hand, deep learning on point sets hasn’t yet reached the “matu-
rity” of deep learning on RGB images. To the best of our knowledge, most of the point cloud classification
approaches in the literature were based either only on synthetic models, or on a limited set of views from
depth sensors. In this experimental work, we use a recent PointNet deep neural network architecture to reach
the same or better level of performance as specialized hand-designed descriptors on a difficult dataset of non-
synthetic depth images of small household objects. We train the model on synthetically generated views of 3D
models of objects, and test it on real depth images.
1 INTRODUCTION
In this paper, classification of objects in depth ima-
ges obtained by a 3D camera is considered. Object
classification is the problem of categorization of an
object in the image in one of the previously defined
classes according to similarity of its features to cer-
tain features characteristic to a particular class. Ob-
ject classification is, for example, an important ca-
pability of an intelligent robot, which should handle
previously unseen objects. Classification is also im-
portant for higher level tasks like object recognition.
Object recognition can also be referred to as object
detection, since normally it is desirable both to loca-
lize an object in a scene, whether its bounding box or
per-point mask, and to simultaneously determine its
class. Once we have a good classification method, it
can be applied to object recognition using a sliding
box or a rough pre-segmentation method followed by
classification.
RGB image classification and related tasks on
RGB images have, arguably, already reached a ma-
ture state. Although classical methods like “hand-
designed” descriptors have proven useful, state-of-
the-art results were mostly obtained by deep neural
network-based methods. The benchmark example is
ImageNet dataset and related task of classification of
RGB images into one of 1000 categories (classes)
(Russakovsky et al., 2015). Building on the success
of methods for RGB image modality processing, cor-
responding applications to point sets, i.e. unorgani-
zed point clouds
1
obtained from depth sensors, were
most often based either on a combination of RGB
and intensity-image classification methods applied to
RGB and depth channels separately (for example (So-
cher et al., 2012); see (Cai, 2017) for more detailed
overview), or volumetric methods (for example (Wu
et al., 2015)), which encode a point set as a sparse
3D tensor. Viewing a depth image as an intensity
image and using corresponding 2D image patch pro-
cessing, as in convolutional neural networks (CNN-
s), however, doesn’t directly make use of geometric
properties of point sets. On the other hand, volume-
tric methods also have several problems: computatio-
nal complexity which quickly becomes high with in-
creasing resolution, quantization effect (point sets are
inherently non-uniform in density) and related pro-
blem of not-adapting to data density. Methods were
introduced that reduce the problem of computatio-
nal complexity of volumetric methods, but the main
problem still remained: none of these representations
is “native” to point sets, which results in the above
mentioned problems. Therefore, other types of re-
presentations for point sets were introduced. These
1
We will use the term point set in this paper to empha-
size the “unorganized” nature of point clouds.
Filipovi
´
c, M., Ðurovi
´
c, P. and Cupec, R.
Experimental Evaluation of Point Cloud Classification using the PointNet Neural Network.
DOI: 10.5220/0006889200470054
In Proceedings of the 10th International Joint Conference on Computational Intelligence (IJCCI 2018), pages 47-54
ISBN: 978-989-758-327-8
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
47

include graph-based and point set-based representati-
ons. Graph-based representations are based on forma-
tion of a graph using local neighbourhood information
of points in the point set. Point set-based representa-
tions are the most general, since they don’t introduce
any prior information and instead use raw points. We
adopt such a representation in this work.
1.1 Contributions of this Paper
To the best of our knowledge, the existing point cloud
classification approaches based on neural networks
were tested either only on 3D models (Qi et al.,
2017a; Qi et al., 2017b), on a limited set of views
from depth sensors (Socher et al., 2012) or using mul-
tiple views of an object (Qi et al., 2016; Su et al.,
2015). However, it is not clear how the classifier trai-
ned on a limited number of views would generalize to
different views, which are not covered by the training
set. From our perspective, it is advantageous to have
3D models of objects to be able to synthetically gene-
rate every possible view, or, more precisely, all realis-
tic views of an object. On the other hand, we want to
test the classifier on real RGB-D images. Therefore,
we train the network using many synthetically gene-
rated views of an object. Namely, we use a dataset of
3D models of objects, randomly rotate every model
multiple times, and capture partial views from a fixed
virtual camera location. In this way, the model is ho-
ped to be general enough to be robust to viewpoint
variation. This also practically removes the need to
pre-align the models (i.e. depth maps) in both the
training and test sets. On the other hand, the model
is tested on real images from depth sensors. A similar
approach was used in a few papers before, for exam-
ple in (Song and Xiao, 2014), but not for our parti-
cular application: object classification from a single
partial view, i.e. a depth map obtained from a depth
sensor.
We use the PointNet architecture (Qi et al.,
2017b), which has some important advantages com-
pared to commonly used volumetric methods, as dis-
cussed in the Introduction. Originally it was used only
for processing of full 3D models, but partial data in
the form of depth maps are more challenging.
We test this methodology on 3DNet (Wohlkinger
et al., 2012), a dataset of small household objects, and
obtain the same level of accuracy as the specialized
hand-designed descriptor (ESF) (Wohlkinger et al.,
2012; Wohlkinger and Vincze, 2011). However, one
of the advantages of neural network-based approaches
like the one we use here is speed
2
.
2
Actually, to be precise, here we refer to optimized GPU
implementations; as shown for example in (Ku et al., 2018),
1.2 Organization of the Paper
Related work is discussed in Section 2. PointNet (Qi
et al., 2017a) and PointNet++ (Qi et al., 2017b) neu-
ral network architectures for processing of point sets,
as well as data preparation procedure and training de-
tails, are reviewed in Section 3. The datasets used in
the experiments, the experimental setup and the obtai-
ned results are presented in detail in Section 4. Con-
cluding discussion can be found in Section 5.
2 RELATED WORK
Classification methods based on RGB and intensity
image-based representations of RGB-D images in-
clude Convolutional-Recursive Neural Networks (So-
cher et al., 2012) and Multiview CNN-s (Qi et al.,
2016; Su et al., 2015). They share the common
flaws of this type of methods, mentioned in the intro-
duction. Volumetric representations were studied for
example in (Maturana and Scherer, 2015; Wu et al.,
2015; Qi et al., 2016). Methods that reduce the com-
putational complexity of volumetric representations
include (Engelcke et al., 2017; Li et al., 2016). Graph-
based deep learning has also been intensively resear-
ched in recent years (Kipf and Welling, 2016; Verma
et al., 2017; Simonovsky and Komodakis, 2017; Def-
ferrard et al., 2016; Monti et al., 2017; Bronstein
et al., 2017; Klokov and Lempitsky, 2017). Point
set-based representations include (Qi et al., 2017a; Qi
et al., 2017b; Savchenkov, 2017; Monti et al., 2017;
Shen et al., 2017; Hua et al., 2017; Wang et al., 2018).
Regarding available datasets, here we review
some of the main representatives. ShapeNet (Chang
et al., 2015) is a large dataset of 3D models col-
lected from various places. It contains more than
3000 semantic categories and is an attempt to extend
the famous ImageNet (Deng et al., 2009) to 3D mo-
dels. Also, it contains rich annotations: language-
related (WordNet taxonomy), geometric (alignment,
part, symmetry, object size) and other. RGB-D Object
Dataset (Lai et al., 2011) contains RGB-D images of
300 objects from 51 categories. Since it contains non-
synthetic objects, it is well suited for testing classifi-
cation algorithms on real data. It is (much) smaller
than ShapeNet, but still contains significant number
of classes. It contains only a limited number of views
and, as discussed in Section 2, it s not clear how a
classifier trained on this dataset would generalize to
different views. ModelNet (Wu et al., 2015) is anot-
her dataset of synthetic 3D models. It was used in
classical hand-crafted processing can potentially compete
with deep neural networks when implemented properly.
IJCCI 2018 - 10th International Joint Conference on Computational Intelligence
48

the literature both for 3D object and depth map, i.e.
partial view, classification, as in (Maturana and Sche-
rer, 2015; Wu et al., 2015). The 3D models in Mo-
delNet are pre-aligned, which reduces the number of
degrees of freedom and makes the classification task
easier. In addition to these, there are many other avai-
lable RGB-D datasets created for different purposes
(Firman, 2016), but for our application we found no
better dataset than 3DNet (Wohlkinger et al., 2012).
Namely, it contains 3D models of objects from diffe-
rent classes as the training set, and RGB-D images of
objects from the corresponding classes in the training
set.
A comprehensive literature review on 3D classi-
fication and recognition was done in (Carvalho and
Wangenheim, 2017). However, here we provided
more focused and, to the best of our knowledge, more
up-to-date references. Another recent performance
comparison of deep learning methods for RGB-D ob-
ject classification can be found in (Cai, 2017). They
used a different methodology (more precisely, diffe-
rent point cloud representation and architectures of
neural network), and evaluated on different datasets.
3 METHODOLOGY
One of the first methods for processing of raw point
sets was PointNet (Qi et al., 2017a). It is a deep
3
neural network that operates directly on point sets.
In the follow-up paper (Qi et al., 2017b), the impro-
vement of PointNet, named PointNet++, was introdu-
ced. PointNet processes a point set point-wise, and
doesn’t take into account neighbourhood information
around every point, as 2D convolution does. The main
idea of PointNet++ is to introduce local processing
into the PointNet architecture. However, extension
of 2D convolution to point sets is not straightforward
because of non-organized nature of point sets. Point-
Net++ doesn’t actually extend the 2D convolution to
point sets, but only applies PointNet architecture to
local point neighbourhood. However, it still proces-
ses local information hierarchically, and in that sense
is similar to 2D convolution. In many recent papers
(Monti et al., 2017; Shen et al., 2017; Hua et al., 2017;
Wang et al., 2018), various extensions of 2D convo-
lution to 3D point sets were proposed. Here we used
only the PointNet++ architecture for simplicity and
speed.
3
Historically, even networks with more than one hid-
den layer have been referred to as “deep”. Therefore, even
though we use less than 10 layers, as in the original Point-
Net architecture, we use the term deep network.
Figure 1: Architecture of PointNet++ network. N is the
number of points, d the input dimension, C the number of
input features (e.g. RGB or normals; we used C = 0), K the
number of nearest neighbours, N
i
the number of subsampled
points in layer i and C
i
is the number of channels of layer
i. Each pointnet layer operates first pointwise, and finishes
with region-wise max pooling.
The overall architecture of PointNet++ is shown
in Figure 1. The first part of the network serves as
a feature extractor. Its input is unorganized point
cloud, i.e. just a set of 3D points, optionally with
some features, like color or local surface normal for
every point. A very useful property of this network
is the invariance to the exact number and ordering
of input points. The output is a set of region (lo-
cal) features. This part consists of aggregation steps,
where points are grouped based on geometric distance
calculated from (x, y, z) coordinates and intermediate
PointNet-like layers which consist of convolutional,
Rectified Linear Unit (ReLU) nonlinearity and max-
pooling layers. The second part of the network is
basically a multi-layer perceptron (several fully con-
nected convolutional layers followed by ReLU), and
serves as a neural network classifier. For more details
the reader is referred to the original paper (Qi et al.,
2017b).
The basic PointNet++ architecture, diagrammed
in Figure 1, can be improved by using multi-scale or
multi-resolution grouping. Here we briefly describe
the multi-scale grouping (MSG). The reader is refer-
red to the original paper (Qi et al., 2017b) for more
details. Multi-resolution grouping was described as
more computationally efficient in (Qi et al., 2017b),
but we use MSG here and sacrifice little speed for
accuracy. Neighbourhood grouping in PointNet++
can be performed in two basic ways: grouping based
on the number of nearest neighbours, and grouping
based on radius. We use grouping based on radius,
use multiple radii at each point, and concatenate the
resulting multiple features into one region-feature.
The notation we use to describe the ex-
act architecture used and its hyperparameters
is the following (it is the same as used in
Experimental Evaluation of Point Cloud Classification using the PointNet Neural Network
49

the original paper (Qi et al., 2017b)). With
SA(K, [r
1
, . . . , r
m
], [[l
(1)
1
, . . . , l
(1)
d
], . . . , [l
(m)
1
, . . . , l
(m)
d
]])
we denote a multi-scale Set Abstraction (SA) layer
which groups input points into K regions (centered at
a subset of points selected using the Iterative Farthest
Point sampling), uses multiple scales with m radii r
i
,
with each scale followed by d per-point convolutional
pointnet layers, each having l
(i)
j
output channels
4
.
Per-point convolutional layers are all followed by
Rectified Linear Unit (ReLU) nonlinearity. Features
for m scales are concatenated into one l
(1)
d
+ . . . +l
(m)
d
region feature vector. Additional parameters should
be selected to account for the non-uniformity of
point sets: a number of points at every scale in every
neighbourhood. We add those as a third parameter to
the above definition of SA. SA ([l
1
, . . . , l
d
]) denotes
a global set abstraction layer that outputs a single
global feature. Basically, it is a set abstraction layer
that uses all points as one region. The output is then
an l
d
-element feature vector obtained by max-pooling
over all points. Fully connected layers are denoted by
FC(l, d p), where l is the width and d p denotes dro-
pout ratio. Fully-connected layers without dropout
are denoted by FC (l). The particular architecture
used in our research, as well as the values of all the
parameters, are presented in Section 4.
3.1 Preparation of Training Data
Here we describe the procedure for data preparation
and pre-processing used in the experiments.
For each instance in each class we generate a re-
asonably large number of synthetic views by rand-
omly rotating the model and capturing the view from
a fixed virtual camera location. Our implementa-
tion of random rotation is based on Euler angles,
which doesn’t exactly cover the view sphere uni-
formly, but we consider it “uniform enough” to re-
present the views of an object from all angles. For
classes with smaller number of object instances, we
generate more views to make the training dataset ba-
lanced. A random subset of views, approximately ba-
lanced, is used as a validation set
5
during training for
early stopping. It should be noted that, in this way,
the stopping is done based on generalization to other
views of same instances and not to other instances.
We have tried using separate instances in each class
as a held-out validation set, but without improving the
4
Please refer to the original paper (Qi et al., 2017b) if
more clarifications are needed.
5
That is, a held-out set which is not used in training and
serves as an indication of training progress in terms of ge-
neralization accuracy
results. Because we generate reasonably large num-
ber of views for each model, views in the validation
set are expected to be similar to some of the views in
the training set. However, it doesn’t seem to negati-
vely effect the generalizationn performance on the test
set, according to the obtained results. All point sets
are randomly subsampled to contain a fixed number
of points, centralized, and normalized to unit sphere
prior to training. The same preprocessing is applied
to the validation and test sets. In (Wohlkinger et al.,
2012), a sub-sampling scheme based on the size of
mesh faces was used, which doesn’t assign all points
equal probability, but considering the relatively large
number of sampled points we use here, random sub-
sampling should suffice.
3.2 Training Details
Robustness of deep neural networks, i.e. stability to
input perturbations is, unfortunately, not really their
known characteristic. This subject is an important to-
pic of current research, and many methods to achieve
robustness have already been proposed. Here we use
a common approach of input data augmentation: we
randomly perturb the input data during training, si-
mulating noise. More precisely, we split the training
process in two parts: in the first part, we use no pertur-
bation, and train the network until the accuracy on the
validation set approximately reaches its maximum; in
the second part, we fine-tune the resulting network
by perturbing the inputs both during training and va-
lidation, and again stop when validation accuracy on
the perturbed validation set approximately reaches its
maximum. Thereby, certain degree of stability to in-
put noise is achieved. Data augmentation as described
above also has another important purpose of reducing
the risk of overfitting.
We also note that previous works, e.g. (Song and
Xiao, 2014), have shown that it is advantageous to
train the model on synthetically generated views rat-
her than depth maps from depth sensors, due to sensor
noise and missing depth; namely, it improves the re-
sults on real depth maps compared to the model trai-
ned on noisy data only. Hence, we used the same stra-
tegy in our experiments.
4 EXPERIMENTS
We perform experiments on image clasification on the
3DNet dataset (Wohlkinger et al., 2012). We used the
original code for PointNet++
6
. All experiments were
6
https://github.com/charlesq34/pointnet2
IJCCI 2018 - 10th International Joint Conference on Computational Intelligence
50
performed on a PC with 16GB RAM and with Nvidia
GeForce GTX 1060 GPU with 6GB memory.
3DNet dataset
7
contains 3 sets of CAD
8
models,
organized in 10 (Cat10), 60 (Cat60) and 200 (Cat200)
classes, respectively. Number of instance objects per
class varies. Since Cat10 model database contains
only colorless 3D models, only depth information is
used in our experiments. CAD models are generally
not aligned. For each instance in each class we gene-
rate 200 synthetic views, as described in Section 3.1.
In this way we obtain 15000 views per class for 10-
class 3DNet set. For larger, 200-class set, we generate
a smaller number (5000) of views per class. A random
subset of 10000 views is used as a validation set. All
point sets were randomly subsampled to contain 2048
points and preprocessed as described in Section 3.1.
Next, we describe the exact hyper-parameters of
the network. The following architecture was used for
the Cat10 dataset:
SA(256, [0.1, 0.2, 0.4], [32, 64, 128],
[[8, 16, 16], [16, 32, 32], [32, 64, 64]]) →
SA(64, [0.2, 0.4, 0.8], [16, 32, 64],
[[64, 64, 128], [128, 128, 256], [128, 128, 256]]) →
SA([256, 256, 256]) →
FC(256, 0.4) → FC(128, 0.4) → FC(10)
Also, batch normalization was used for all but the last
layer. We experimented with several combinations of
hyper-parameters, keeping the number of layers fixed.
Also, we couldn’t reach the same accuracy with the
PointNet (Qi et al., 2017a) network, despite using the
same training procedure and hyperparameter-tuning.
Gaussian perturbations were added for data augmen-
tation, as described in Section 3.2, with standard devi-
ation 0.01. Optimization parameters were as follows:
initial learning rate was set to 0.001, with staircase
exponential decay every 200000 training samples and
decay rate of 0.7, and Adam was used as an optimiza-
tion algorithm with default values of exponential de-
cay rate for moments suggested in the original paper
(Kingma and Ba, 2014): β
1
= 0.9 and β
2
= 0.999.
Batch size was 32. The number of training epochs
was set to 200. The training took about 24 hours.
The test database in 3DNet consists of 1652 RGB-
D images of objects on the table, in various positi-
ons. Some of the images were corrupted, so we used
1612 of them for testing. The objects in the test ima-
ges are from the same set of classes as the training
7
https://repo.acin.tuwien.ac.at/tmp/permanent/3d-
net.org/
8
The acronym CAD refers to “Computer-Aided De-
sign”; here it means that the models are synthetically ge-
nerated.
set. Segmentation masks are not provided; therefore,
segmentation was performed as a preprocessing step.
Although object segmentation is not the topic of this
research, for the purpose of completeness, we provide
a brief explanation of the heuristic procedure used to
segment the objects of interest in the test images from
the background. Since the camera is mounted on a
fixed position with respect to the scene, one image
is used to estimate the parameters of the supporting
plane and these parameters are then used to remove
the supporting plane from the other images. Further-
more, only the points within a cylindrical volume of
a specified radius around the camera were conside-
red. Then, connected sets of points, referred to in this
paper as clusters, were identified within this volume.
The object of interest is usually represented in the test
image by a single cluster, but in some cases it can be
split into two or more clusters. Hence, nearby clusters
are merged according to the proximity of their convex
hulls. Finally, the largest cluster is considered to be
the object of interest.
The results are shown in Table 1. The confusion
matrix can be seen in Table 2. Classes apple and
bowl are often confused, resulting in low accuracy on
apple class. However, other classes are discriminated
very well. The confusion matrix is similar to the one
in (Wohlkinger et al., 2012), where two classes are
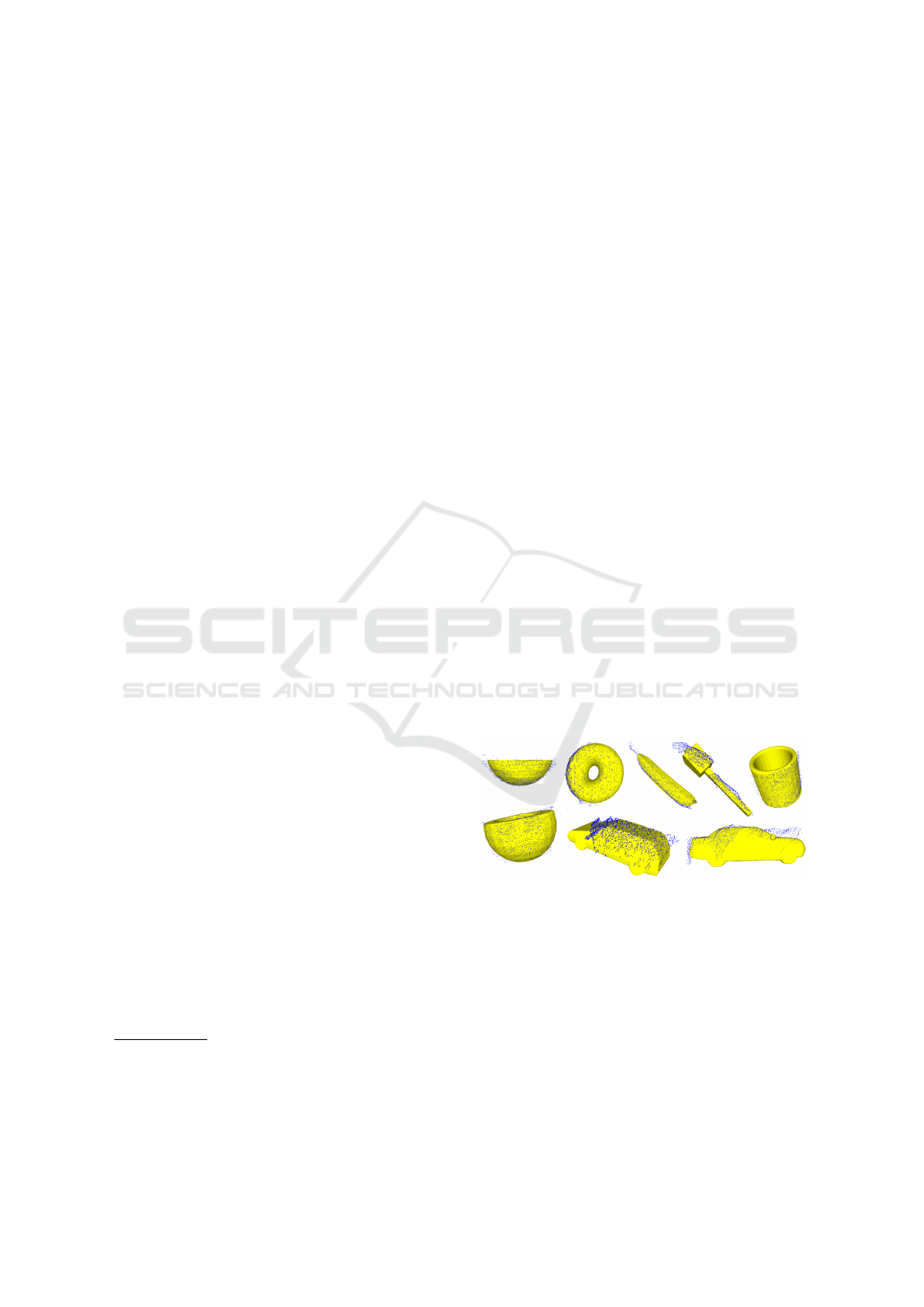
confused and the rest are very well separated. Figure
2 shows examples of misclassified views on top of 3D
models from the predicted classes. In Figure 3 we also
show t-SNE (Maaten and Hinton, 2008) visualization
of features (before the fully connected layers) of point
clouds from the test set.
Figure 2: Examples of misclassified views, represented by
point clouds (blue points) on top of 3D models (yellow)
from the corresponding predicted classes. Left to right, top
to bottom: label apple, prediction bowl; label apple, pre-
diction donut; label bottle, prediction banana; label bottle,
prediction hammer; label toilet paper, prediction mug; label
mug, prediction bowl; label tetra-pak, prediction car; label
bottle, prediction car. Best viewed in color and zoomed in.
In overall, we get the same level of accuracy as
(Wohlkinger et al., 2012). The overall testing time for
1612 images in the test set, using our non-optimized
implementation, was 9 s. The testing speed is one of
the advantages of neural network-based classification;
for example, in (Wohlkinger et al., 2012), the repor-
Experimental Evaluation of Point Cloud Classification using the PointNet Neural Network
51

Figure 3: t-SNE visualization of features of point clouds
from the test set. missed_{class} denotes examples that
were misclassified by the network. Best viewed in color
and zoomed in.
ted processing time for one image is 45 ms, which
makes their method significantly slower
9
. It should
be noted that most probably a better result could have
been obtained by generating (many) more views of
each object, and in a more formal manner, for exam-
ple by covering the 3D rotation parameter space uni-
formly and more densely. However, here we restricted
the training set to a reasonably large number of views
to make the training and hyperparameter tuning more
practical. Better results could possibly be obtained
by filtering low-entropy views (i.e. non-informative /
non-realistic views) in the training and validation sets,
as in (Wohlkinger et al., 2012).
Table 1: Classification accuracy on Cat10 subset of 3DNet
dataset. ESF refers to the descriptor that was used to obtain
the best results in (Wohlkinger et al., 2012), in combination
with 10-NN classifier. OVERALL refers to average per-
class accuracy.
class ESF (Wohlkinger et al., 2012) our
apple 99% 35%
banana 89% 100%
bottle 94% 94%
bowl 88% 100%
car 98% 97%
donut 96% 98%
hammer 100% 100%
mug 100% 96%
tetra pak 91% 97%
toilet paper 61% 98%
OVERALL 92% 92%
The 3DNet dataset also contains a larger and more
difficult Cat200 subset, with actually more than 200
classes. The overall accuracy reported in (Wohlkin-
ger et al., 2012) on that dataset is 71%. A significant
hardware strength (most importantly, GPU memory)
and/or training time is needed to train the network for
9
Again, to be precise, hand-crafted processing can be
optimized for speed for real-time applications. Please see
footnote 2.
Table 2: Confusion matrix for the classification on the
Cat10 dataset.
Predicted
apple
banana
bottle
bowl
car
donut
hammer
mug
tetra pak
toilet paper
Actual
apple
44 0 0 74 0 1 0 4 0 5
banana
0 69 0 0 0 0 0 0 0 0
bottle
0 3 307 0 13 0 1 0 0 0
bowl
0 0 0 68 0 0 0 0 0 0
car
0 0 0 0 153 0 1 0 0 0
donut
0 0 0 0 1 49 0 0 0 0
hammer
0 0 0 0 0 0 173 0 0 0
mug
0 0 0 9 1 0 0 357 0 5
tetra pak
0 0 2 0 1 0 0 1 168 0
toilet paper
0 0 0 0 0 0 0 0 0 90
such a large-scale dataset. Because of our hardware
limitations, we reduced the number of views per class
to 5000. This is probably the main reason why we
couldn’t reach the same level of accuracy. We show
the results on the Cat200 subset in Table 3.
Table 3: Classification accuracy on Cat200 subset of 3DNet
dataset. ESF refers to the descriptor that was used to obtain
the best results in (Wohlkinger et al., 2012), in combination
with 10-NN classifier. OVERALL refers to average per-
class accuracy. Please see the text for the explanation of
poor results on this subset and possibilities to improve them.
class ESF (Wohlkinger et al., 2012) our
apple 98% 0%
banana 70% 92%
bottle 79% 45%
bowl 76% 51%
car 44% 1%
donut 62% 78%
hammer 96% 50%
mug 99% 70%
tetra pak 72% 45%
toilet paper 17% 95%
OVERALL 71% 54%
The code for reproducing the results is available
upon request.
5 CONCLUSIONS
We have experimentally tested the promising point
set-based neural network acrhitecture PointNet on a
dataset of depth map images of small household ob-
jects. PointNet operates directly on unorganized point
clouds. The network is trained on synthetically gene-
rated views of 3D models of objects, and tested on
real depth images from depth sensor. We used only
geometric, i.e. depth information; no color informa-
tion was used. On the Cat10 subset of the 3DNet da-
taset, we obtained the same level of accuracy as the
IJCCI 2018 - 10th International Joint Conference on Computational Intelligence
52

original approach in (Wohlkinger et al., 2012), which
is, to the best of our knowledge, the best result on this
dataset. Neural network-based approaches, like the
one we used here, are, however, much faster. Also,
PointNet architecture was used mostly for processing
of full 3D data, and not partial scans, as we use it
here. On the Cat200 subset of the 3DNet dataset,
which is significantly more computationally involved,
we couldn’t reach the same level of accuracy as re-
ported in (Wohlkinger et al., 2012); arguably, due to
GPU memory limitations. Generally, it would be inte-
resting to see a result analogous to those obtained on
the famous ImageNet classification challenge, on a si-
milar dataset of 3D objects or depth scans from depth
sensors. We are aware of several related challenges
on the ShapeNet collection (Chang et al., 2015), but
not for classification.
There are, of course, similar approaches to object
recognition and detection in scenes, also based on ge-
nerated views of 3D models of objects. However, they
are mostly based on volumetric or multi-view repre-
sentations, which can, arguably, be less practical in
certain applications. Also, here we were interested in
evaluating the performance on the specialized point
cloud classification problem; namely, if a classifica-
tion method performs well, especially the one based
on neural networks, it can be used as a basis for more
interesting problems of object detection (recognition)
in more complex scenes. For example, such approa-
ches were used for object detection in both RGB and
RGB-D images; however, that is still a very active
area of research.
ACKNOWLEDGEMENTS
This work has been fully supported by the Croa-
tian Science Foundation under the project number IP-
2014-09-3155.
REFERENCES
Bronstein, M. M., Bruna, J., LeCun, Y., Szlam, A., and Van-
dergheynst, P. (2017). Geometric deep learning: going
beyond euclidean data. IEEE Signal Processing Ma-
gazine, 34(4):18–42.
Cai, Z. (2017). Feature Learning for RGB-D Data. PhD
thesis, University of Sheffield.
Carvalho, . L. E. and Wangenheim, . A. (2017). Literature
review for 3d object classification/recognition.
Chang, A. X., Funkhouser, T., Guibas, L., Hanrahan, P., Hu-
ang, Q., Li, Z., Savarese, S., Savva, M., Song, S., Su,
H., et al. (2015). Shapenet: An information-rich 3d
model repository. arXiv preprint arXiv:1512.03012.
Defferrard, M., Bresson, X., and Vandergheynst, P. (2016).
Convolutional neural networks on graphs with fast lo-
calized spectral filtering. In Advances in Neural Infor-
mation Processing Systems, pages 3844–3852.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-Fei,
L. (2009). Imagenet: A large-scale hierarchical image
database. In Computer Vision and Pattern Recogni-
tion, 2009. CVPR 2009. IEEE Conference on, pages
248–255. IEEE.
Engelcke, M., Rao, D., Zeng Wang, D., Hay Tong, C.,
and Posner, I. (2017). Vote3Deep: Fast Object De-
tection in 3D Point Clouds Using Efficient Convolu-
tional Neural Networks. In Proceedings of the IEEE
International Conference on Robotics and Automation
(ICRA).
Firman, M. (2016). Rgbd datasets: Past, present and future.
In Proceedings of the IEEE Conference on Computer
Vision and Pattern Recognition Workshops, pages 19–
31.
Hua, B.-S., Tran, M.-K., and Yeung, S.-K. (2017). Point-
wise convolutional neural network. arXiv preprint
arXiv:1712.05245.
Kingma, D. P. and Ba, J. (2014). Adam: A method for sto-
chastic optimization. arXiv preprint arXiv:1412.6980.
Kipf, T. N. and Welling, M. (2016). Semi-supervised clas-
sification with graph convolutional networks. arXiv
preprint arXiv:1609.02907.
Klokov, R. and Lempitsky, V. S. (2017). Escape from
cells: Deep kd-networks for the recognition of 3d
point cloud models. CoRR, abs/1704.01222.
Ku, J., Harakeh, A., and Waslander, S. L. (2018). In defense
of classical image processing: Fast depth completion
on the cpu. arXiv preprint arXiv:1802.00036.
Lai, K., Bo, L., Ren, X., and Fox, D. (2011). A large-scale
hierarchical multi-view rgb-d object dataset. In Robo-
tics and Automation (ICRA), 2011 IEEE International
Conference on, pages 1817–1824. IEEE.
Li, Y., Pirk, S., Su, H., Qi, C. R., and Guibas, L. J. (2016).
Fpnn: Field probing neural networks for 3d data. In
Advances in Neural Information Processing Systems,
pages 307–315.
Maaten, L. v. d. and Hinton, G. (2008). Visualizing data
using t-sne. Journal of machine learning research,
9(Nov):2579–2605.
Maturana, D. and Scherer, S. (2015). Voxnet: A 3d convo-
lutional neural network for real-time object recogni-
tion. In Intelligent Robots and Systems (IROS), 2015
IEEE/RSJ International Conference on, pages 922–
928. IEEE.
Monti, F., Boscaini, D., Masci, J., Rodola, E., Svoboda, J.,
and Bronstein, M. M. (2017). Geometric deep lear-
ning on graphs and manifolds using mixture model
cnns. In Proc. CVPR, volume 1, page 3.
Qi, C. R., Su, H., Mo, K., and Guibas, L. J. (2017a). Point-
net: Deep learning on point sets for 3d classification
and segmentation. Proc. Computer Vision and Pattern
Recognition (CVPR), IEEE.
Qi, C. R., Su, H., Nießner, M., Dai, A., Yan, M., and Gui-
bas, L. J. (2016). Volumetric and multi-view cnns for
object classification on 3d data. In Proceedings of the
Experimental Evaluation of Point Cloud Classification using the PointNet Neural Network
53

IEEE Conference on Computer Vision and Pattern Re-
cognition, pages 5648–5656.
Qi, C. R., Yi, L., Su, H., and Guibas, L. J. (2017b). Point-
net++: Deep hierarchical feature learning on point sets
in a metric space. arXiv preprint arXiv:1706.02413.
Russakovsky, O., Deng, J., Su, H., Krause, J., Satheesh,
S., Ma, S., Huang, Z., Karpathy, A., Khosla, A.,
Bernstein, M., Berg, A. C., and Fei-Fei, L. (2015).
ImageNet Large Scale Visual Recognition Challenge.
International Journal of Computer Vision (IJCV),
115(3):211–252.
Savchenkov, A. (2017). Generalized convolutional neu-
ral networks for point cloud data. arXiv preprint
arXiv:1707.06719.
Shen, Y., Feng, C., Yang, Y., and Tian, D. (2017). Neig-
hbors do help: Deeply exploiting local structures of
point clouds. arXiv preprint arXiv:1712.06760.
Simonovsky, M. and Komodakis, N. (2017). Dynamic
edge-conditioned filters in convolutional neural net-
works on graphs. In Proc. CVPR.
Socher, R., Huval, B., Bhat, B., Manning, C. D., and Ng,
A. Y. (2012). Convolutional-Recursive Deep Learning
for 3D Object Classification. In Advances in Neural
Information Processing Systems 25.
Song, S. and Xiao, J. (2014). Sliding shapes for 3d ob-
ject detection in depth images. In Fleet, D., Pajdla,
T., Schiele, B., and Tuytelaars, T., editors, Computer
Vision – ECCV 2014, pages 634–651, Cham. Springer
International Publishing.
Su, H., Maji, S., Kalogerakis, E., and Learned-Miller, E.
(2015). Multi-view convolutional neural networks for
3d shape recognition. In Proceedings of the IEEE
international conference on computer vision, pages
945–953.
Verma, N., Boyer, E., and Verbeek, J. (2017). Dynamic
filters in graph convolutional networks. arXiv preprint
arXiv:1706.05206.
Wang, Y., Sun, Y., Liu, Z., Sarma, S. E., Bronstein,
M. M., and Solomon, J. M. (2018). Dynamic graph
cnn for learning on point clouds. arXiv preprint
arXiv:1801.07829.
Wohlkinger, W., Aldoma Buchaca, A., Rusu, R., and Vin-
cze, M. (2012). 3DNet: Large-Scale Object Class Re-
cognition from CAD Models. In IEEE International
Conference on Robotics and Automation (ICRA).
Wohlkinger, W. and Vincze, M. (2011). Ensemble of shape
functions for 3d object classification. In Robotics and
Biomimetics (ROBIO), 2011 IEEE International Con-
ference on, pages 2987–2992. IEEE.
Wu, Z., Song, S., Khosla, A., Yu, F., Zhang, L., Tang, X.,
and Xiao, J. (2015). 3d shapenets: A deep represen-
tation for volumetric shapes. In Proceedings of the
IEEE conference on computer vision and pattern re-
cognition, pages 1912–1920.
IJCCI 2018 - 10th International Joint Conference on Computational Intelligence
54
