
Reviewing Task and Planning Ontologies: An Ontology Engineering
Process
Julita Bermejo-Alonso
UPM Autonomous Systems Laboratory (ASLab) c/Jos
´
e Guti
´
errez Abascal, 2, 28006 Madrid, Spain
Keywords:
Task Ontologies, Planning Ontologies, Ontological Engineering, Autonomous Systems.
Abstract:
Bermejo-Alonso and colleagues (Bermejo-Alonso et al., 2018) define an ontology for tasks and planning in
the autonomous system domain. It focuses on an emergency scenario for Unmanned Ground Vehicles (UGVs)
or Unmanned Aerial Vehicles (UAVs). In this context, it is necessary to define how the autonomous system
will act, detailing how the actions should be done to achieve system goals. The planning process starts with
detailing the planning domain knowledge: the initial state, the goals, the actors, the resources, etc. This domain
knowledge is then fed into a planner that, if a solution exists, will produce a plan or a set of plans to be used
by the robotic system. Ontologies are a useful way to provide this domain knowledge and can be used to
characterise the planning domain knowledge. However, there is a number of available ontologies for planning,
being unclear which one is best for autonomous systems. This paper presents a review of existing task and
planning vocabularies, taxonomies and ontologies, as a necessary first step in an ontology engineering process
that addressed the autonomous system planning needs. This paper describes the analised ontologies, their
main features, and how the process to integrate them was carried out.
1 INTRODUCTION
To solve a problem, we would need two kinds of
knowledge: the domain knowledge and the problem–
solving knowledge (Chandrasekaran et al., 1998).
If this problem relates to planning, the knowledge
about the domain represents the objects, states, cau-
ses of change states, tasks, effects, etc. The problem–
solving knowledge would represent the goal, the dom-
ain data, the problem–solving state, the methods and
algorithms, etc. The challenge is how to integrate
the planning algorithms and methods (i.e. problem–
solving knowledge) with a rich representation of plan-
ning and task knowledge in terms of e.g. plans, tasks,
actions and events (i.e. domain–specific knowledge)
(Gil, 2005). The idea would be to provide the planner
a consistent representation of the complete domain to
work with for any individual planning problem (Har-
tanto and Hertzberg, 2009).
Defining the different elements involved in a plan-
ning problem tends to be a time–consuming task,
since it requires to detail all the elements involved
in the planning process, each time the planning pro-
blem is approached. It would be a key element not
only that the knowledge about processes and activi-
ties could be shared among the stakeholders, but also
that this knowledge could be reused from planning to
planning problem.
An ontology that provides the concepts and rela-
tionships of the domain can ease the planning pro-
cess. Firstly, ontologies can be used to characterise
and share the planning domain knowledge, as some
kind of knowledge base. They represent an approach
to enable richer plan representations, as well as kno-
wledge reuse across planning applications (Gil and
Blythe, 2000). Secondly, ontologies are the core ba-
sed on which the planning reasoning mechanisms do
produce the plan (Moreno et al., 2000).
However, there is not a unique, agreed view on
a planning ontology. This is the problem we faced
when attempting to find an existing ontology as back-
bone for our particular planning problem for an auto-
nomous system in an emergency scenario. This pa-
per describes the review process and not the resulting
ontology that has been described elsewhere. The re-
view process analysed and compared existing vocabu-
laries and ontologies, to evaluate their possible re-use
or their integrability into a single ontology. The re-
sulting ontology would become a reusable component
integrated in the Ontology for Autonomous Systems
(OASys) (Bermejo-Alonso et al., 2011), (Bermejo-
Alonso et al., 2013).
Bermejo-Alonso, J.
Reviewing Task and Planning Ontologies: An Ontology Engineering Process.
DOI: 10.5220/0006922401830190
In Proceedings of the 10th International Joint Conference on Knowledge Discovery, Knowledge Engineering and Knowledge Management (IC3K 2018) - Volume 2: KEOD, pages 183-190
ISBN: 978-989-758-330-8
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
183

The paper is organised as follows: Section 2 re-
views the different ontologies found in the literature.
Section 3 summarises the performed ontological en-
gineering process. Finally, Section 4 provides some
concluding remarks, as well as future lines of rese-
arch.
2 A SUMMARY OF PLANNNING
ONTOLOGIES
This sections summarises the main features of the re-
viewed ontologies. They are classified based upon
the formalisation mechanism or language used in their
definition.
2.1 Natural Language Task Ontologies,
Vocabularies and Taxonomies
Natural language was the first approach to develop
vocabularies, taxonomies and ontologies for the plan-
ning domain. Sometimes, the conceptualisation fo-
cuses on tasks only. Other times, the ontologies also
provide additional concepts to characterise the goals,
the actions, and plan features.
An initial attempt to provide a planning ontology
in natural language is proposed in (Valente, 1995)
with a set of concepts or vocabulary at knowledge-
level to compare different planning approaches exis-
ting at that time. They define the kind of knowledge
involved in the planning task, specifying the dynamic
and static roles involved. The dynamic role refers to
the plan as the goal of the planning task. It will be
equivalent to the problem–solving knowledge. The
static roles relate to the plan model consisting of the
world description and the plan description. Concepts
are defined in natural language, with a medium level
of formalisation. The same approach is further de-
tailed and extended in (Benjamins et al., 1996) but
with an even lower level of formalisation.
To standardise process and plan interchanges, ot-
her natural language ontology is proposed in (Tate,
1996), (Tate, 1998). The ontology is structured as dif-
ferent elements: meta-ontology, top level ontology, li-
brary of shared ontological elements and detailed on-
tology section. The concept definitions includes terms
such as plan, agent, constraint , environment, and is-
sue. Strictly speaking, it consist more of a dictionary
or taxonomy of plan related concepts than a proper
ontology. Some relations are verbally expressed bet-
ween the concepts Agent and Constraint, but no other
elements required in an ontology, such as axioms, are
provided.
An ontology for a problem solver is described in
(Chandrasekaran et al., 1998), considering two diffe-
rent levels of ontologies. The first one relates to the
domain knowledge. The second–level one to the met-
hods and algorithms to be used in the planning pro-
cess. As part of the first–level one, the Domain Fac-
tual Knowledge (objects, properties, relations, classes
and subclasses, states, processes, events, and parts),
the Problem Solving Goal (world description), or the
Problem State components (goals, subgoals, require-
ments as preconditions, etc). Within the second–level
ontology, a Control Ontology where tasks are charac-
terised as sequential, conditional, iteration, and recur-
sion. Despite of being called ontologies, the actual
descriptions do not sum up. A series of concepts are
considered and merely defined.
A comprehensive effort to conceptualise the plan-
ning process is the PLANET ontology (Gil and
Blythe, 2000), where different planning related con-
cepts and relationships are provided in natural lan-
guage. The notion of a plan is represented using a se-
ries of concepts: initial-planning-context, goals, acti-
ons, tasks, and choice-points. The initial-planning-
context consists of an initial state, goal description,
and external constraints and a resulting plan is repre-
sented as a set of commitments to actions taken by an
agent to achieve the specified goals. The goals des-
cribe what needs to be achieved when developing a
plan. A solution plan is validated against completion,
consistency, feasibility, and justified criteria. The on-
tology does not include traditional planning elements
related to actors or agents, locations, time and resour-
ces. Neither the evaluation of plans according to a
criterion.
The viewpoint of planning consisting of dynamic
and static roles defined in (Valente, 1995) is reused
and extended in (Rajhpathak and Motta, 2004). In
this case, the authors provide a task ontology in terms
of the initial world state, the goal to be achieved with
the planning process, the plan tasks, the actions, the
agents, the constraints, the preferences as soft con-
straints, and the evaluation through a cost function.
The ontology is aimed at representing a generic plan-
ning task ontology, not related to a particular planning
paradigm, specific domain or application. It is forma-
lised at a high level, with a precise and comprehen-
sive description of planning related terms for the plan-
ning problem. However, it uses the Operational Con-
ceptual Modelling Language (OCML) (Motta, 1997)
which was used during some years but lacks an upda-
ted version.
A recent effort to characterise a Task Ontology
within the robotics domain is provided by (Balakir-
sky et al., 2017). The authors propose doing task
KEOD 2018 - 10th International Conference on Knowledge Engineering and Ontology Development
184

characterisation in terms of different task dimensions
(description, property, implementation, and context)
to suitably organise the ontological elements. These
definitions are an initial step towards the ontological
engineering of a Robot Task Representation ontology
to be standardised by IEEE. The dimensions appro-
ach is a good mechanisms to approach the different
ontology perspectives.
2.2 Description Logics based Ontologies
Other ontologies have been formalised using Des-
cription Logics (DL) (Baader et al., 2010), a family
of knowledge representation languages used to for-
malise the knowledge of an application domain in a
structured manner. There are several efforts to cha-
racterise or analyse the planning knowledge from a
DL perspective, as reviewed in (Gil, 2005). Gene-
rally speaking, these ontologies focused on the dom-
ain representation only, as taxonomies of objects in
the domain, action, plan, and goals. Procedural or
problem–solving knowledge is rarely considered in
these ontologies. Using DL allows to organise the
class description in a taxonomic hierarchy, which is
useful when a Hierarchical Task Network approach is
used to solve the planning problem. Moreover, DL
reasoners provide two interesting capabilities: class
subsumption and instance recognition. Additional DL
benefits include inference, modularity and tolerance
for inconsistent descriptions. This paper also lists use
of these taxonomies by different planning algorithms
and reasoners.
The DOLCE+DnS Plan Ontology (DPPO) (Gan-
gemi et al., 2005), where DnS stands for the Onto-
logy of Descriptions and Situations, is an ontology
for planning based in DOLCE (Borgo and Masolo,
2010). The intended use of DPPO is to specify plans
at an abstract level, without considering existing re-
sources. The underlying idea is to provide an onto-
logy to specify social or cognitive plans, not so much
computationally executable plans. This example fo-
cuses more on conceptualising the domain object re-
presentation, not so much on procedural knowledge
about how to tackle the planning process. It is worth
mentioning that the different kinds of tasks initially
mentioned in (Chandrasekaran et al., 1998) are de-
tailed and extended in this ontology. This way a task
is not only defined as an activity to perform, but also
on how it should be performed as part of a plan.
Additional research attempted to integrate the
domain knowledge with the planning process. A DL
ontology for the Hierarchical Task Network (HTN)
planning paradigm is described in (S
´
anchez-Ruiz
et al., 2007). The authors consider that to resolve a
planning problem, two different kinds of knowledge
need to be formalised. On the one hand, the domain
description as the rules of the world where the planner
will act in terms of domain constraints and operators
(this term being understood from a HTN perspective,
not a human-being within the planning problem). On
the other hand, the description of the problem in terms
of the initial state and the goal, where a plan becomes
a sequence of grounded operators to evolve the world
from this initial state to a final one that fulfils or satis-
fies the expressed goal.
A combination of OWL-DL and HTN planning
is proposed in (Hartanto and Hertzberg, 2009), (Har-
tanto, 2009), where DL is used to express the planning
domain by an ontology. The HTN Planning Ontology
includes a DL formalisation of concepts such as plan-
ning domain, planning problem, HTN method, opera-
tor, and task network. Once the ontology is defined,
it is used by a DL reasoner, to obtain a concrete or
filtered DL model. The overall process was applied to
a mobile robotic navigation domain. However, the re-
search focuses more on the reasoning process phases
as a combination of DL reasoning and a HTN planner,
where the problem–solving knowledge is formalised
as an ontology. No mention is made to the domain
knowledge.
Behnke et al. (Behnke et al., 2015a), (Behnke
et al., 2015b) provide an approach to integrate onto-
logies within the planning problem. Their objective is
twofold. Firstly, to define an ontology as the central
element of domain knowledge. This ontology con-
sists of two ontologies, one for the planning domain
concepts (O1) and a second one for the domain kno-
wledge (O2). Within O1, different planning-related
concepts in terms of abstract tasks (compound tasks),
subtasks, task hierarchy, refinement or decomposition
method, relations and axioms are defined following
the HTN planning formalism. O2 contains the know-
ledge about the objects and elements in the domain.
The overall ontology is used as the knowledge ele-
ment. The level of formalisation is not high, but too
oriented to the HTN planning paradigm.
2.3 OWL Related Ontologies
Another set of ontologies for task and planning have
made use of OWL (W3C, 2012). In (Sirin et al.,
2004), an OWL reasoner was integrated with an ar-
tificial intelligence planner. The reasoner was used
to store the world state, answer the planner’s queries
about the evaluation of preconditions, and update the
state when the planner simulated the effects of ope-
rators. An HTN planning system was integrated with
an OWL DL reasoner to explore the use of semantic
Reviewing Task and Planning Ontologies: An Ontology Engineering Process
185
reasoning over the ontology. Some general notions
on concepts supporting the planning process, such as
action, effects, or states are given. No detailed des-
cription of the ontology is provided, with a focus on
the planning mechanisms from a HTN perspective.
Bouillet et al. (Bouillet et al., 2007) propose a
domain-independent, general purpose knowledge en-
gineering and planning framework to construct plan-
ning domains and problems based on OWL ontolo-
gies. The planning model is described as a set of
OWL facts, represented as RDF graphs. Actions are
described as RDF graph transitions. In turn, precon-
ditions, effects as well as planning goals are also spe-
cified as RDF graph pattern. The framework allows
for the different stakeholders to participate as dom-
ain experts, action specifiers or end-users to specify
the ontologies, actions and planning goals respecti-
vely. The justification to use OWL ontologies is to
be able to reuse available OWL ontologies with com-
mon and general concepts for planning, such as time
and so.
An OWL ontology is developed for planning dom-
ains using Prot
´
eg
´
e, based on the HTN (Hierarchical
Task Network) paradigm in (Freitas et al., 2014). The
ontology provides a set of concepts such as: Domain-
Definition as the definition of the planning domain,
Operator to represent the primitive tasks, Method to
decompose compound tasks, Axioms to infer precon-
ditions for methods and operators, Predicates to repre-
sent the preconditions and postconditions of actions
and world state, Goal as method invocations, etc. To
exemplify its use, they instantiated the ontology for a
multi–agent scenario known as gold miners, with one
instance for the operator and the methods. They also
proposed algorithms to convert the OWL planning
ontology to other formalisms such AgentSpeak lan-
guage or to SHOP (an HTN planning system). This
way, they solved both the knowledge representation
(as an ontology) with the problem solving (automated
planning).
Balakirsky (Balakirsky, 2015) proposes an OWL
ontology within agile manufacturing. The ontology is
divided in three parts. The first part contains know-
ledge on elements involved in the application: basic
elements such as point to conceptualise 3-D positions
or more complex elements such as parts to define how
a part is composed of, where is stored, and its name.
The second part contains all the action-related con-
cepts, with a focus on robotic and vision aspects. The
third part of the ontology contains the specific instan-
ces for this particular domain. The actual contents of
the three ontologies are provided in a graphical way,
with not much level of detail on actual definitions,
properties or axioms.
3 ONTOLOGICAL
ENGINEERING PROCESS
This section describes the different stages followed
in the ontological engineering of a planning ontology
for our robotic application, by analysing in detail the
reviewed ontologies described in Section 2.
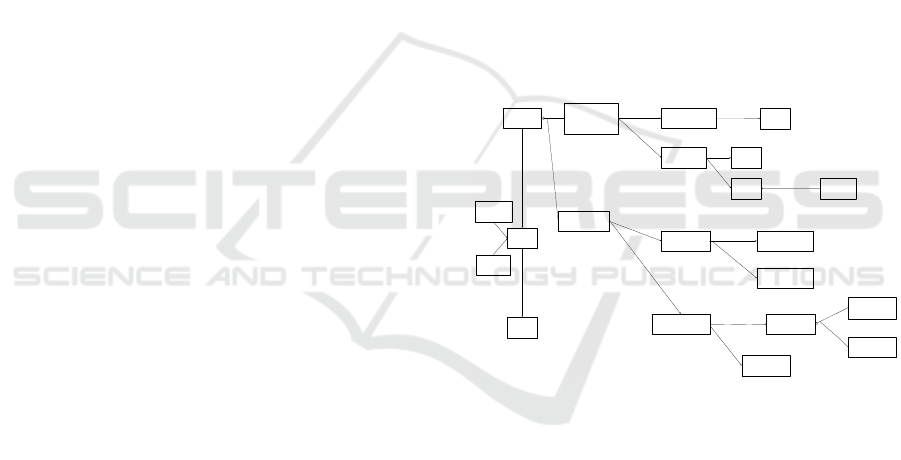
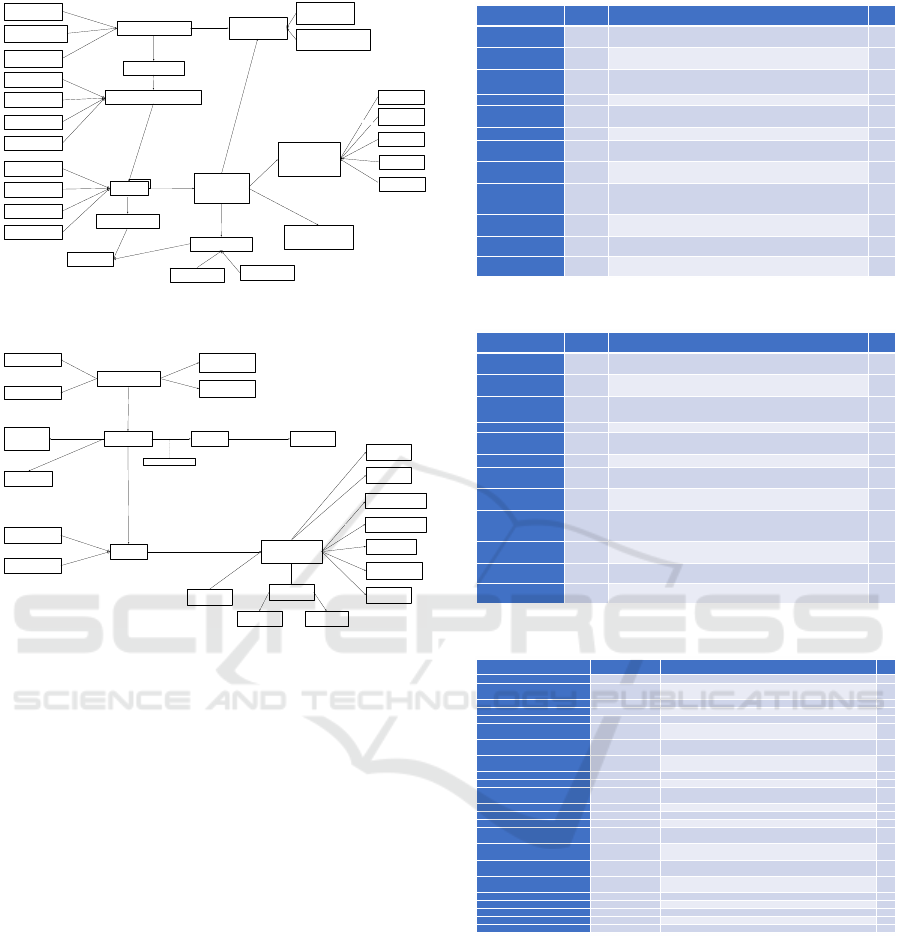
3.1 Graphical Representations
As described in Section 2, different formalisms have
been used in planning ontologies. To establish a com-
parison of them, the first step was to represent them
on a common ground. To prevent committing to a par-
ticular implementation language (natural, DL, OWL,
etc) or planning mechanism (HTN, etc), the represen-
tation of the ontologies was made as a diagram where
most important concepts and relationships were de-
tailed. This process was carried out for all the revie-
wed ontologies. For the sake of space in this paper,
partial examples are provided in Fig. 1, Fig. 2, and
Fig. 3.
WorldDescription
usedIn
PlanModel
PlanDescription
consistsOf
performs
Actor
Planning
StateDescription
StateChanges
consistsOf
PlanStructure
State
consistsOf
Event
Action
consistsOf
PlanAssessment
consistsOf
PlanComposition
consistsOf
StateChangeData
consistsOf
Constraints
Intended/
DesiredGoal
evaluates
considers
HardConstraint
SoftConstraint
obtains
Plan
InitialState
GoalState
Figure 1: Graphical representation of (Valente, 1995).
The goal was to represent the different planning
vocabularies, taxonomies and ontologies in a com-
mon and straightforward representation. This way, we
could analyse the main concepts and relationships, to
determine if any of them was suitable to be applied to
our particular robotic system application. The analy-
sis of the graphical representations provided different
outcomes.
Firstly, the different vocabularies and ontologies
focused on the main concepts for the planning dom-
ain knowledge, such as plan, task, action, actor, con-
straint, etc, however with different level of detail. The
two main problems were that i) the same term was
used with different purposes and ii) different terms
were used to represent the same concept. Aproaching
the analysis with a graphical representation helped
providing some insights on the main concepts to be
considered as the core of the integrated ontology.
KEOD 2018 - 10th International Conference on Knowledge Engineering and Ontology Development
186
GoalSpecificationPlanningProblemContext
Capability
PlanTask
(InstantiatedTask)
accomplishes
PlanTaskTemplate
(TaskModel or Tree)
consistsOf
Precondition
specifiedBy
has
Task Commitments
PlanTaskDescription
(Operator/
ActionSchema)
describedBy
considers
Ordering
Temporal
Subplan
Plan
InitialState/
WorldState
ExternalConstraints
JustifiedPlan
CompletePlan
ConsistentPlan
FeasiblePlan
spanInto
DesiredGoals
specifies
StateBasedGoal
ObjectiveBasedGoal
Objects
Effect
has
has
has
PlanningProblem
has
CandidatePlan
becomes
Rejected
Feasible
Selected
Unexplored
consistOf
Commitment
PlanningLevel
has
PlanCommitments
considers
Figure 2: Graphical representation of (Gil and Blythe,
2000).
PlanningTask
Parameter
consistsOf
Precondition
PlanTask
(Operator/
ActionSchema)
considers
PlanModel
InitialWorldState
Constraints
(hard constraint)
Complete
Valid
GoalDescription
HasTimeRange
Postcondition
(effect)
obtains
CandidatePlan
satisfies
Preference
(soft
constraint)
AchievedByAction
considers
Action
RequiresAgent
TimeHorizon
CostFunction
achievedBy
Agent
Duration
Precondition
Postcondition
(effect)
has
becomesA
performedwithin
Plan
representedBy
Constraints
SolutionCriterion
has
has
has
has
perfoms
has
has
has
has
consistOf
consistOf
satisfies
Figure 3: Graphical representation of (Rajhpathak and
Motta, 2004).
However, it was clear that further work was nee-
ded to establish commonalities among the different
ontologies. Not so much on the terms themselves, but
the underlying ontological conceptualisations.
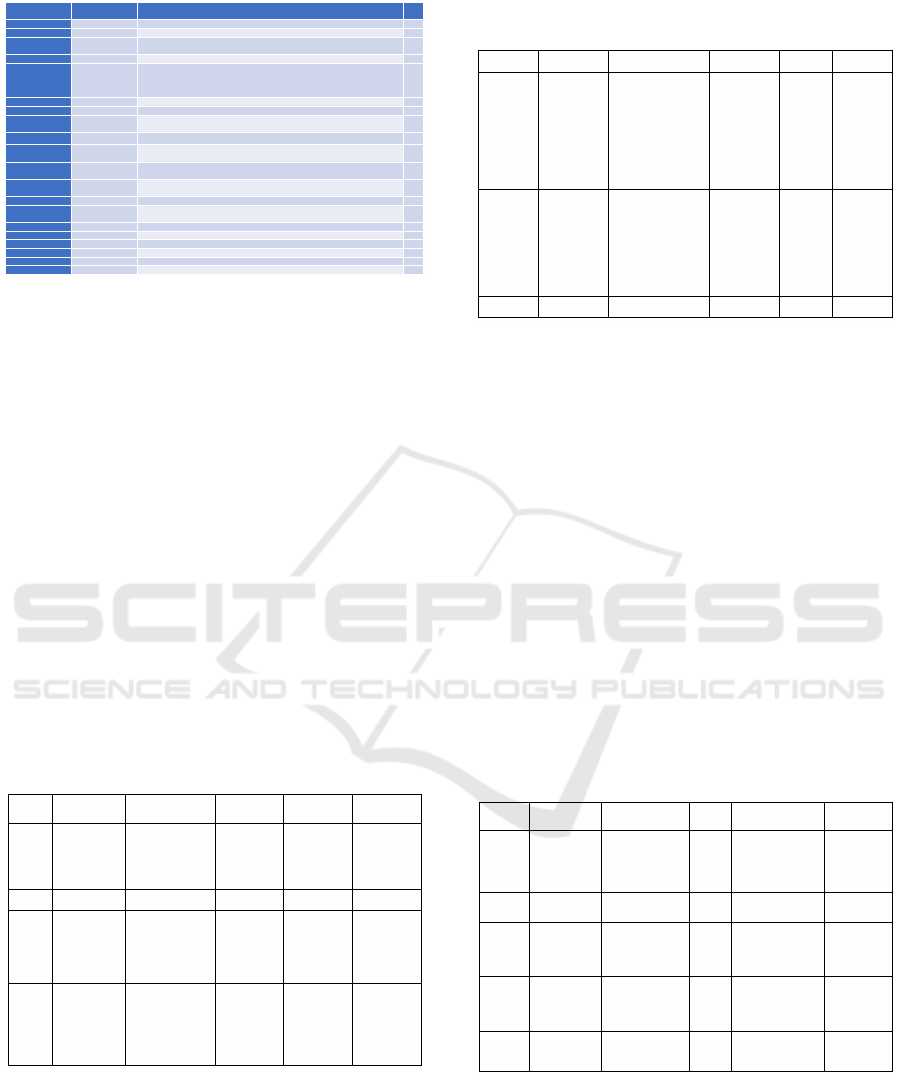
3.2 Tabular Representation
As a first step to reuse and integrate the ontological
contents, the different terms from the vocabularies,
taxonomies and ontologies were represented in an in-
termediate tabular form. Some partial views of the
tabular representation for the same graphical repre-
sentation in Section 3.1 are shown in Fig. 5, Fig. 6,
and Fig. 7.
These tables collected the definitions of the diffe-
rent terms, either explicitly provided in the original
paper or extracted from its text. The terms were furt-
her classified as concepts (C), attributes (A), or relati-
onships (R).
The ontological contents of these tables were later
divided and classified according to different dimensi-
ons as described in Section 3.3.
!"#$
%&'('&$%
)"*+'+!+('
!&,"
,-./$012-
!"#$%#%&'#(%)*%#(+%,"#$%)*%-#+.%/01%2$%3/(*)*$*%/0%$".%
!/4'+5.*34)&$)/( #(+%$".%
6'#(5.*34)&$)/(
7
304-1)256478970/
8(/,'.+9.%#:/;$%$".%!/4'+%)(%,")3"%$".%6'#(()(9%,)''%$#<.%&'#3.1%2$%3/-&4)*.*%
=$#$.5.*34)&$)/(
#(+%=$#$.7"#(9.
7
304-1%9.92
>".%=$#$.%/0%$".%!/4'+
7
%9.92)256478970/
6#4$%/0%
!/4'+5.*34)&$)/(1%8(/,'.+9.%$/%4.&4.*.($%$".%!/4'+=$#$.
7
%9.92:;./<25
6#4$%/0%
!/4'+5.*34)&$)/(1%8(/,'.+9.%$/%4.&4.*.($%$".%3"#(9.*%)(%$".%!/4'+=$#$.1%
=&.3)0)3#$)/(%/0%$".%.'.-.($*%#%6'#(%)*%3/-&/*.+%/01
7
,-./
7
%=>8-./
?/;$)(.*%$"#$%#4.%3/-&/*.+%/0%3/--#(+*%,")3"%#4.%.)$".4%@3$)/(*%/4%/$".4%
=;:&'#(*
1
7
,-./)256478970/
8(/,'.+9.%#:/;$%$".%6'#(%$/%:.%9.(.4#$.+1%2$%3/(*)*$*%/0%
6'#(=$4;3$;4. #(+%
6'#(@**.**-.($8(/,'.+9.
1
7
,-./%94=69=42
2$%*&.3)0).*%"/,%$".%$*%/0%#%6'#(%*;3"%#*%@3$)/(*%/4%
=;:&'#(* #4.%#**.-:'.+%
$/9.$".41%2$%3/(*)*$*%/0%
6'#(7/-&/*)$)/( #(+%=$#$.7"#(9.5#$#
7
,-./:0?8057970/
5.*34)&$)/(%/0%$".%&'#(%,)$"%4.*&.3$%$/%"/,%$".%
=$#$.7"#(9.* #4.%#44#(9.+%$/%-#<.%
;&%#%&'#(1
7
%9.92:;./<2).9.
8(/,'.+9.%#:/;$%$".%?.*/;43.*%A@9.($B%$)-.B%
.$3C%#**)9(.+%$/%=$#$.7"#(9.*1
7
,-./@55255?2/9A/0B-21<2
D#3$/4*%$"#$%-#<.%#%3.4$#)(%6'#(%A/4%
=;:&'#(C%:.$$.4%$"#$%#(/$".4
7
Figure 4: Tabular representation of (Valente, 1995).
!"#$
%&'('&$%
)"*+'+!+('
!&,"
,-./$012-
!"#$%#%&'#(%)*%#(+%,"#$%)*%-#+.%/01%2$%3/(*)*$*%/0%$".%
!/4'+5.*34)&$)/( #(+%$".%
6'#(5.*34)&$)/(
7
304-1)256478970/
8(/,'.+9.%#:/;$%$".%!/4'+%)(%,")3"%$".%6'#(()(9%,)''%$#<.%&'#3.1%2$%3/-&4)*.*%
=$#$.5.*34)&$)/(
#(+%=$#$.7"#(9.
7
304-1%9.92
>".%=$#$.%/0%$".%!/4'+
7
%9.92)256478970/
6#4$%/0%
!/4'+5.*34)&$)/(1%8(/,'.+9.%$/%4.&4.*.($%$".%!/4'+=$#$.
7
%9.92:;./<25
6#4$%/0%
!/4'+5.*34)&$)/(1%8(/,'.+9.%$/%4.&4.*.($%$".%3"#(9.*%)(%$".%!/4'+=$#$.1%
=&.3)0)3#$)/(%/0%$".%.'.-.($*%#%6'#(%)*%3/-&/*.+%/01
7
,-./
7
%=>8-./
?/;$)(.*%$"#$%#4.%3/-&/*.+%/0%3/--#(+*%,")3"%#4.%.)$".4%@3$)/(*%/4%/$".4%
=;:&'#(*
1
7
,-./)256478970/
8(/,'.+9.%#:/;$%$".%6'#(%$/%:.%9.(.4#$.+1%2$%3/(*)*$*%/0%
6'#(=$4;3$;4. #(+%
6'#(@**.**-.($8(/,'.+9.
1
7
,-./%94=69=42
2$%*&.3)0).*%"/,%$".%$*%/0%#%6'#(%*;3"%#*%@3$)/(*%/4%
=;:&'#(* #4.%#**.-:'.+%
$/9.$".41%2$%3/(*)*$*%/0%
6'#(7/-&/*)$)/( #(+%=$#$.7"#(9.5#$#
7
,-./:0?8057970/
5.*34)&$)/(%/0%$".%&'#(%,)$"%4.*&.3$%$/%"/,%$".%
=$#$.7"#(9.* #4.%#44#(9.+%$/%-#<.%
;&%#%&'#(1
7
%9.92:;./<2).9.
8(/,'.+9.%#:/;$%$".%?.*/;43.*%A@9.($B%$)-.B%
.$3C%#**)9(.+%$/%=$#$.7"#(9.*1
7
,-./@55255?2/9A/0B-21<2
D#3$/4*%$"#$%-#<.%#%3.4$#)(%6'#(%A/4%
=;:&'#(C%:.$$.4%$"#$%#(/$".4
7
Figure 5: Tabular representation of (Valente, 1995).
!"#$
%&'('&$%
)"*+'+!+('
!&,
"
,-.//0/,123-4562/7487
!"#$#%&'(#)*"'%++,-.$#/"+'%0/,$'$1*'2&%""#"(23/0&*-
4
,-.//0/9,123-45
5.*6#7#6'8/%&+9'4/"+$3%#"$+'%":'%++,-.$#/"+'%0/,$'$1*'
;</3&:=>!"#$#%&5$%$*
4
:21-;%7.74
?/:*&'/7'$1*'@")#3/"-*"$'7/3'A1#61'$1*'2&%"'#+'#"$*":*:
4
:21-;
@")#3/"-*"$
:21-;+/070.-%7.74
!"#$#%&</3&:5$%$*
B'6*3$%#"'</3&:5$%$*':*+63#.$#/"
4
)4<014;=2.-
<1%$'#+'$/'0*'%66/-.&#+1*:'#"'$1*'.3/6*++'/7'+/&)#"('$1*'
2&%""#"(23/0&*-
4
"8741/.-62/<71.0/7
C*+#3%0&*'/3',":*+#3%0&*'.3/.*3$#*+'/3'@77*6$+'/7' 5/&,$#/"+'$/'
$1*'2&%""#"(23/0&*-9' +,61'%+',+*3'%:)#6*'%":'.3*7*3*"6*+
4
,-./
B'+*$'/7'4/--#$-*"$'/7'B6$#/"+'$%D*"'0E'%"'B(*"$'$/'%61#*)*'
+/-*'+.*6#7#*:'8/%&+F
4
6./;0;.74,-./
2/$*"$#%&'+/&,$#/"'$/'%'2&%""#"(23/0&*-
4
>/7104;
B'
4%":#:%$*2&%" $1%$'#+' E*$'$/'0*'*G.&/3*:'/3'$*+$*:
4
#4?4@74;
H/3'+/-*'3*%+/"9'
4%":#:%$*2&%" $1%$'1%+'0**"'3*I*6$*:'%+'$1*'
.3*7*33*:'/"*
4
*4.<03-4
B'
4%":#:%$*2&%" $1%$'1%+' 0**"'$3#*:'%":'"/$'3*I*6$*:
4
%4-4@74;
B'
4%":#:%$*2&%" $1%$'1%+' 0**"'
4
=2.-%A4@0B0@.702/
B"E$1#"('$1%$'(*$+'%66/-.&#+1*:'0E'%'2&%"9'
5,0.&%" /3'J%+D
4
%7.74C.<4;=2.-%A4@0B0@.702/
8/%&5.*6#7#6%$#/"
$/'3*.3*+*"$'8/%&+'$1%$'3*7*3'$/'+/-*'
.3*:#6%$*',+*:'$/':*+63#0*'$1*'
</3&:5$%$*
4
(3?4@70D4C.<4;=2.-%A4@0B0@.72/
8/%&5.*6#7#6%$#/"
$/'3*.3*+*"$')*30K /3'%6$#/"K0%+*:'
*G.3*++#/"+
4
EF5./#4.;.3-4)4<@10A702/
8/%&5.*6#7#6%$#/"
$/'.3/)#:*'%':*+63#.$#/"'/7'%'8/%&'$/'%"'
@":L+*3
4
,-./!.<G)4<@10A702/
J%+DC*6/-./+#$#/"
J%+DJ3**
B6$#/"+'/3'/.*3%$#/"+'$1%$'6%"'0*'$%D*"'#"'$1*'
</3&:5$%$*
4
,-./!.<G
J%+D
B"'#"+$%"$#%$#/"'/7'%'J%+D'%+'#$'%..*%3+'#"'%'2&%"
4
,-./!.<G!45A-.74
J%+DJ*-.&%$*
B"'B6$#/"'$1%$'6%"'0*'.*37/3-*:'#"'$1*'
</3&:5$%$*
4
%F37.<G
B'
J%+DC*+63#.$#/" ;%D%'J%+D>
4
,105070D4,-./!.<G)4<@10A702/
B'.3#-#$#)*'
J%+DJ*-.&%$*
4
6.A.30-07H
B'8/%&'7/3'A1#61'$1*'J%+D'6%"'0*',+*:
4
Figure 6: Tabular representation of (Gil and Blythe, 2000).
3.3 Concept Integration
To establish a criterion on how to organise the ontolo-
gical conceptualisations, we considered that the main
component in any planning process is the task. As
such, a task theory enables addressing tasks at class
level through the definition of tasks, environment, and
their characteristics from a formal viewpoint (Thoris-
son et al., 2016). Being impossible to represent or
characterise all possible tasks, such a theory should
focus on characterising the main features of different
Reviewing Task and Planning Ontologies: An Ontology Engineering Process
187
!"#$
%&'('&$%
)"*+'+!+('
!&,
"
+-./.0123415%/0/6
!"#$%&'()*+,+#$,+$+"#$-#./00/0.$ &1$+"#$2(,00/0.$2'&3#44
5
7301
6#4/'#)$%&'()*+,+#$+&$,3"/#7#$+"'&8."$ +"#$2(,00/0.$2'&3#449
5
,10-!089
:$4#+$&1$2(,0+,4;$<"/3"$42#3/1=$/0+#'>#)/,+#$?&,(4$<"/3"$0##)$+&$-#$
,33&>2(/4"#)$+&$,3"/#7#$+"#$&7#',(($?&,($&1$+"#$@(,00/0.$ !,4;
5
:;/.3-
:$1/0/+#$4#+$&1$:3+/&04$+&$-#$#A#38+#)$+&$,33&>2(/4"$,$@(,0!,4;
5
:<6-/
:$4#+$&1$:.#0+4$<"&$,'#$'#42&04/-(#$1&'$,3"/#7/0.$@(,0!,4;4$+"'&8."$+"#$
#A#38+/&0$&1$:3+/&049$:$2#'4&0B$.'&82$&'$#0+/+=$<"/3"$"&()4$,$28'2&4#$,0)$/4$
'#42&04/-(#$1&'$,3"/#7/0.$)/11#'#0+$@(,0!,4;4$+"'&8."$+"#$#A#38+/&0$&1$
:3+/&049
5
,040=6/64
@&/0+#'$+&$)&>,/0$#0+/+/#4$'#(#7,0+$+&$+"#$@(,00/0.$@'&3#44
5
!.=6>34.?3-
:$+/>#$</0)&<$ </+"/0$<"/3"$+"#$@(,0$/4$'#C8/'#)$+&$+,;#$2(,3#
5
@3-8/40.-/
D,')
5&04+',/0+
:$4#+$&1$3&04+',/0+4$0&+$+&$-#$7/&(,+#)$-=$+"#$@(,09$:$@'&2#'+=$+",+$>84+$0&+$
-#$7/&(,+#)$-=$,$7,(/)$*&(8+/&09
5
,46A646-;68
*&1+$3&04+',/0+
:$4#+$&1$3'/+#'/,$1&'$2,'+/,((=$',0;/0.$3&>2#+/0.$2(,04
5
@38/*B-;/.3-
:$1803+/&0$<"/3"$2'&7/)#4$,$.(&-,($>#3",0/4>$1&'$3&>2,'/0.$+"#$5&4+$&1$
:(+#'0,+/7#@(,0
5
%31B/.3-@4./64.3-
:$>,22/0.$1'&>$,$@(,0$+&$E+'8#B$1,(4#F$<"/3"$)#+#'>/0#4$<"#+"#'$,$
5,0)/),+#@(,0$/4$,$*&(8+/&0
5
,10-(C/.=.?0/.3-
@4./64.3-
:$5'/+#'/&0$+&$3"&&4#$,0$G2+/>,(@(,0$</+"$+"#$(#,4+$5&4+
5
(C/.=01,10-
:$@(,0$</+"$+"#$(#,4+$5&4+$,33&')/0.$+&$4&>#$#7,(8,+/&0$1803+/&0
5
,10-$3561
5,0)/),+#
@(,0
:$4#C8#03#$&1$E@(,0!,4;B:.#0+F$2,/'4$<"#'#$+"#$:.#0+$/4$,-(#$+&$#A#38+#$+"#$
:3+/&04$,44&3/,+#)$</+"$+"#$@(,0!,4;
5
D08,040=6/64
@,',>#+#'$,44&3/,+#)$</+"$,$@(,0!,4;
:
D08,46;3-5./.3-
5&0)/+/&0$ +&$-#$+'8#$-#1&'#$,$@(,0!,4;$/4$#A#38+#)
:
D08,38/;3-5./.3-
5&0)/+/&0$ +&$-#$+'8#$,1+#'$,$@(,0!,4;$/4$#A#38+#)
:
0;D.6E65FG:;/.3-
:3+/&0$+&$-#$#A#38+#)$+&$,3"/#7#$+"#$@(,0!,4;
:
46HB.468:<6-/
:$@(,0!,4;$/4$,44&3/,+#)$</+"$&0#$&'$>&'#$:.#0+4$+&$,3"/#7#$/+
:
D08!.=6#0-<6
!"#$!/>#%/0)&<$</+"/0$<"/3"$,$@(,0!,4;$>84+$+,;#$2(,3#9
:
Figure 7: Tabular representation of (Rajhpathak and Motta,
2004).
task-related concepts: the task itself, the environment
where it takes place, the goals, the effects, and the
agents that perform the task. With this approach, the
tabular representations made for each one of the vo-
cabularies, taxonomies and ontologies considered in
Section 2 were further classified to characterise diffe-
rent dimensions of the concept of task:
• Task Context: this set of concepts were focused
on the world (aka the environment) and its state.
Considered concepts such WorldInitialState, Wor-
ldDescription, etc.
• Task Description: the concept of task is the cor-
nerstone of the ontology. How the concept of task
has been named and conceptualised was conside-
red within this dimension. A partial view of the
result is shown in Table 1.
Table 1: Some concepts for the Task Description dimension.
!"#$
%&!'!&#
($)*!*+*'!
+&,$
!'+$%
%'-./$
!"#$
%&'
%()*+&',*)-'./+.0/'
*&.1)'
"&2'+1).1)'
*&3+/4")*+&')-")'4+50#'
)-0'"..6*(")*+&'3/+4'+&0'
7)")0'
)+'"&+)-0/8
9+&(0.)
:"6"$*/#$;<=>?
!"#$
%()*5*);
%&'"()*5*);'"#'."/)'+3'"'
@6"&
9+&(0.)
:0-&$0<=>AB
@6"&!"#$
!"#$
%&'*&#)"&)*")*+&'+3'"'
!"#$'"#'*)'"..0"/#'*&'"'
@6"&
9+&(0.)
@6"&'C1#)'"#'"'
./03*D')+'*4.6;'*)'*#'
"'!"#$'."/)'+3'"'
@6"&E',-*(-'60"2#'
)+'+/20/*&F'+/'
)04.+/"6'"#.0()#8
G*6<===
@6"&!"#$
%'#0)'+3'@6"&'!"#$#'
,-*(-'#.0(*3;'
*&)0/402*")0'G+"6#'
,-*(-'&002')+'B0'
"((+4.6*#-02')+'
"(-*050')-0'+50/"66'
G+"6'+3')-0'
@6"&'!"#$
9+&(0.)
H"C)".-"$<==I
• Task Decomposition: different types of tasks were
included, such as CompoundTask to characterise
tasks to be further decomposed, as well as Primiti-
veTask to be used for single tasks. Synonyms were
established from all the analysed ontologies. A
partial view on different task decomposition con-
cepts are shown in Table 2.
Table 2: Some concepts for the Task Decomposition dimen-
sion.
!"#$
%&!'!&#
($)*!*+*'!
+&,$
!'+$%
%'-./$
!"#$#%#&'()*+
,%-$#.()*+
/#$01'()*+
21'$'3%)1()*+
234#35()*+
('"$#3)1()*+
,6*#351'6()*+6%7)%6.)368'6
0'"9-"$'468:6)6*#351'6,5'3%6
;,.%-"
<=
,6
()*+6%7)%6.)33-%68'6
4'.-$0-*)81'
=
,6()*+6%7)%6.)368'64#"'.%1:6
'>'.?%'468:6%7'6@*'"6
;,5'3%A,.%-"B<=
C-3.'0%
/?8.1)**6-96()*+
D)"#-?*6
)?%7-"*
D)"#-?*6)?%7-"*
E'73+'FGHI8
C-$0-?34()*+
C-$01'>6()*+
,6()*+6%7)%6.)368'6
4'.-$0-*'46#36-%7'"6
/?8()*+*
,8*%").%6()*+6-"67#57
J1'&'16
()*+6%7)%67)*6%-68'6"'9#3'46
#3%-6$-"'6%)35#81'6()*+*K6
8'#356
!"#$#%#&'()*+ -"6-%7'"6
C-$0-?34()*+
=
C-3.'0%
/?8.1)**6-96()*+
D)"#-?*6
)?%7-"*
E'73+'FGHI8
/?8%)*+
,6()*+6-3'6#*64'.-$0-*'46
#3=
C-3.'0%
E)1)+#"*+:FGHL
• Task Implementation: from our viewpoint, there
is a subtle difference between the concept of Task
and Action. Task is regarded from a conceptual
viewpoint, whereas action will be used in the ac-
tual planning process to assign actors and resour-
ces. In this sense, the implementation concepts
included Precondition or Effect to represent the
conditions to and the result of performing a par-
ticular action. Among this set of concepts, it is
also needed to characterise the Actor that per-
forms the action, to make possible to further dis-
tinguish among the human or the artificial actors
in the system. Also, preconditions and constraints
are part of this dimension, as they will be used to
determine whether an action can or cannot be per-
formed to fulfil a required task. Some concepts
are shown in Table 3, and Table 4.
Table 3: Precondition concepts for the Task Implementation
dimension.
!"#$
%&!'!&#
($)*!*+*'!
+&,$
!'+$%
%'-./$
!"#$%&'()(%&
*+&#$#,,-".+$%&'()(%&+
/%"+-+0-,1
2
*,+-+$3-,,+%"+-,+-))"(45)#+
%/+0-,16
7(38999
!"#$%&'()(%&
2%&'()(%&+5&'#"+:;($;+-+
!"(<()(=#0-,1
$-&+4#+
->>3($-43#+(&+-+?)-)#
!-")+%/+!"(<()(=#0-,1@+
A#/(&#'+-,+3()#"-3
B#;&1#89CD4
*E(%<
!"#$%&'()(%&,+&%)+
#E>3($()3.+-,,#")#'+(&+);#+
$5""#&)+?)-)#
2
AF?2*GAHAI+-E(%<+(,+-+
"#,#"=#'+:%"'
J"#()-,89CKL+
89CK4
!"#'($-)#
HE>"#,,(%&+5,#'+)%+
"#>"#,#&)+!"#$%&'()(%&L+
!%,)$%&)(%&
2
J"#()-,89CKL+
89CK4
!-"-<#)#"
!%(&)#"+)%+'%<-(&+
#&)()(#,+"#3#=-&)+)%+);#+
>3-&&(&M+>"%$#,,
2
G-N)->;-1899K
• Task Evaluation: an important part of the plan-
ning process is to define the goal and some evalu-
ation mechanism to choose among feasible plans.
The latter is usually made using some kind of cost
evaluation in terms of resources or time. With this
purpose, concepts such as Goal or CostFunction
were included in the integrated ontology.
KEOD 2018 - 10th International Conference on Knowledge Engineering and Ontology Development
188
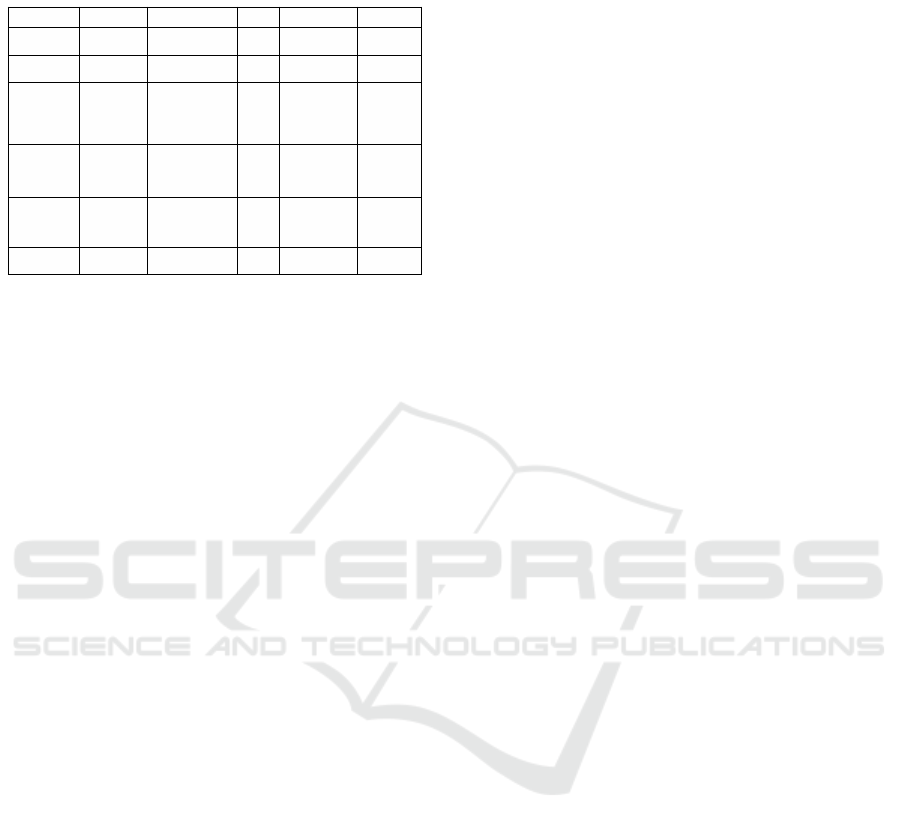
Table 4: Constraint concepts for the Task Implementation
dimension.
!"#$
%&!'!&#
($)*!*+*'!
+&,$
!'+$%
%'-./$
!"#$%&'#()"*'(
%&'#()"*'(
+
,*-*("(*&' ./0*'*'1
(2/
./#*)/.
3)&3/)(*/# &0
(2/
!"#$
4
%&'5/3(
6","$*)#$789:;
%&'#()"*'(
+'<"##/)(*&'<(2"(<5"'<=/<
/>",?"(/.<@*(2<)/#3/5(<
(&<"<1*>/'<A,"'
!"(/:BBC
%&'#()"*'(
D").%&'#()"*'(
+<#/(<&0<5&'#()"*'(#<'&(<
(&<=/<>*&,"(/.<=7<(2/<
A,"'4<
+<A)&3/)(7<(2"(<-?#(<'&(<
=/<>*&,"(/.<=7<"<>",*.<
E&,?(*&'4
%&'5/3(
+<5&'#()"*'(<5"'<=/<
(2/&)/(*5",F<(/52'*5",F<
/'1*'//)*'1F<#&5*",<
&)<5&1'*(*>/<5&'()&,<
"5(*&'#
G"H("32"$899I
JK(/)'",%&'#()"*'(
L/#*)"=,/<&)<?'./#*)"=,/<
3)&3/)(*/#<&)<J00/5(#<&0<
E&,?(*&'#<(&<(2/<
A,"''*'1A)&=,/-
F<#?52<
"#<?#/)<".>*5/<"'.<
3)/0/)/'5/#
%&'5/3(
M*,8999
%&--*(-/'(
E&-/<$*'.<&0<52&*5/<(&<
=/<("$/'<*'(&<"55&?'(N<+<
%&'#()"*'(<(2/<+1/'(<
/,/5(#<(&<"..<"#<"<3")(*",<
#3/5*0*5"(*&'<&0<"<A,"'
%&'5/3(
GJO+!PQRES<+'<
+1/'(<-"7<P'(/'.F<
L/#*)/F<J'0&)5/<&)<
E7'(2/#*#/<"<
%&--*(-/'(
M*,8999
A)/0/)/'5/
E&0(<5&'#()"*'(
+<#/(<&0<5)*(/)*"<0&)<
3")(*",,7<)"'$*'1<
5&-3/(*'1<3,"'#
%&'5/3(
G"H("32"$899I
For each aspect, related concepts from the ana-
lysed vocabularies and ontologies were grouped, to
identify similarities, becoming synonyms, e.g. sim-
ple tasks are named PrimitiveTask, EndingTask, Sing-
leTask, TerminalTask are used. The underlying con-
ceptualisation was the same, so a single concept Sim-
pleTask was chosen. Names were analysed to use a
meaningful one, e.g. between Agent and Actor, the
second one was chosen to remove the software rela-
ted meaning of agent. Around 175 concepts regarding
task and planning were identified, defined, grouped,
and analysed for the final ontology.
4 CONCLUSIONS
As a result of the review and the ontological engi-
neering process described in former sections, an in-
tegrated ontology to provide a common terminology
and relationships to define the planning problem in
a high–level and abstract way was obtained. The
ontology rationale, the initial set of concepts inclu-
ded, and its application in an emergency scenario for
a combined UAV/UGV robotic system is detailed in
(Bermejo-Alonso et al., 2018). The ontology is un-
der extension, as additional information needs to be
added.
To provide the flexibility and the autonomy requi-
red in a robotic unmanned system, it will be important
to detail additional aspects for tasks. For example,
concurrency among tasks being performed, or delibe-
ration tasks for deliberation states in the autonomous
system. It is also important to extend the HTN ap-
proach of compound tasks to be decomposed. With
this purpose, a general concept TaskRepresentation
was chosen to expando to other representations, such
as behaviour trees (Colledanchise and Ogren, 2018)
that address reactive behaviour depending on the set
of action decided by the player in a game. Another
example would be the need for deliberation tasks as a
task to represent deliberation states in the autonomous
system.
The ontology obtained as result of the ontological
engineering process described in this paper focused
mainly in the domain knowledge, that is, the concepts
needed to conceptualise a task theory from different
viewpoints (context, implementation, evaluation, etc)
as described in Section 3.3. Nevertheless, as stated
in Section 1, for the planning process is necessary
to consider both this domain knowledge, but also the
problem–solving knowledge. The set of concepts re-
lated to the latter are not yet conceptualised in the
current ontology. Among other elements, future de-
velopment should pay attention to the decomposition
methods for task trees, to behaviour trees handling, or
to other algorithms to obtain the final plan according
to the selected cost or evaluation, where actors and
resources are clearly allocated to specific actions.
We would also explore using UML (OMG, 2015b)
and SysML (OMG, 2015a), to represent both dom-
ain knowledge and the problem-solving knowledge.
Domain knowledge could be represented as class
diagrams, object diagrams, SysML BDD or IBD.
Problem– solving knowledge can be formalised as
activity, sequence and state machine diagrams, allo-
cation diagrams, etc. The purpose would be to in-
tegrate metamodelling, modelling and ontologies for
the planning domain from a systems engineering per-
spective: to define the plan requirements based on the
domain knowledge ontology, how preconditions and
constraints are considered, how to allocate the actions
to specific actors, how the reasoning and deliberation
process takes place to obtain the possible and candi-
date plans from the ontology, and how the evaluation
process can be implemented to select among feasible
plans.
ACKNOWLEDGEMENTS
We acknowledge the support of the Spanish Go-
vernment through grants RTC-2016-5191-8 Sistema
Aut
´
onomo de VIgilancia y SEguridad basado en
multirrotores (ADVISE), and RTC-2016-5059-8 Sis-
tema Aut
´
onomo para La INtervenci
´
on en Emergen-
cias (SALINE).
REFERENCES
Baader, F., Calvanese, D., McGuinness, D., Nardi, D., and
Patel-Schneider, P. F., editors (2010). The Description
Reviewing Task and Planning Ontologies: An Ontology Engineering Process
189

Logic Handbook: Theory, Implementation and Appli-
cations. Cambridge, 2nd edition edition.
Balakirsky, S. (2015). Ontology based action planning and
verification for agile manufacturing. Robotics and
Computer–Integrated Manufacturing, (33):21–28.
Balakirsky, S., Schlenoff, C., Fiorini, S., Redfield, S., Bar-
reto, M., Nakawala, H., Carbonera, J., Soldatova,
L., Bermejo-Alonso, J., Maikore, F., Goncalves, P.,
de Mori, E., Ragavan, S. V., and Haidegger, T. (2017).
Towards a robots task ontology standard. In Proc.
ASME 2017 International Manufacturing Science and
Engineering Conference, Los Angeles, CA, USA.
Behnke, G., Bercher, P., Biundo, S., Glimm, B., Ponoma-
ryov, D., and Schiller, M. (2015a). Integrating onto-
logies and planning for cognitive systems. In Proc.
28th International Workshop on Description Logics
(DL 2015). CEUR Workshop Proceedings.
Behnke, G., Ponomaryow, D., Schiller, M., Bercher, P., Not-
hdurft, F., Glimm, B., and Biundo, S. (2015b). Co-
herence across components in cognitive systems - on
ontology to rule them all. In Proc. 24th Internatio-
nal Joint Conference on Artificial Intelligence (IJCAI
2015), pages 1442–1449. AAAI Press.
Benjamins, R., de Barros, L. N., and Va-
lente, A. (1996). Constructing planners
through problem-solving methods. At
http://ksi.cpsc.ucalgary.ca/KAW/KAW96/benjamins/.
Bermejo-Alonso, J., Salvador, J., and Sanz, R. (2018). To-
wards an ontology for task and planning in autono-
mous systems: An emergency scenario. In Advances
in Intelligent Systems and Computing,, volume 693,
pages 429–440. Springer, Cham.
Bermejo-Alonso, J., Sanz, R., Rodr
´
ıguez, M., and
Hern
´
andez, C. (2011). An ontological framework for
autonomous systems modelling. International Jour-
nal on Advances in Intelligent Systems, 3(3):211–225.
Bermejo-Alonso, J., Sanz, R., Rodr
´
ıguez, M., and
Hern
´
andez, C. (2013). Ontology engineering for the
autonomous systems domain. In Communications in
Computer and Information Science, volume 348, pa-
ges 263–277. Springer Berlin Heidelberg.
Borgo, S. and Masolo, C. (2010). Ontological Foundations
of Dolce, pages 279–295. Springer Netherlands.
Bouillet, E., Feblowitz, M., Liu, Z., Ranganathan, A., and
Riabov, A. (2007). A knowledge engineering and
planning framework based on owl ontologies. In Pro-
ceedings of the Second International Competition on
Knowledge Engineering.
Chandrasekaran, B., Josephson, J., and Benjamins, V. R.
(1998). Ontology of tasks and methods. In Proc. of the
11th Workshop on Knowledge Acquisition, Modeling
and Management (KAW98), Banff, Alberta, Canada.
Colledanchise, M. and Ogren, P. (2018). Behavior Trees in
Robotics and AI: An Introduction. Taylor and Francis.
Freitas, A., Schmidt, D., Panisson, A., Meneguzzi, F.,
Vieira, R., and Bordini, R. H. (2014). Semantic Re-
presentations of Agent Plans and Planning Problem
Domains, volume 8758 of Lecture Notes in Artificial
Intelligence (LNAI), pages 351–366. Springer Inter-
national Publishing.
Gangemi, A., Borgo, S., Catenacci, C., and Lehmann, J.
(2005). Task tanomies for knowledge content. Techni-
cal Report D07, Laboratory for Applied Ontology.
Gil, Y. (2005). Description logics and planning. AI Maga-
zine, 26(2):73–84.
Gil, Y. and Blythe, J. (2000). PLANET: a shareable and
reusable ontology for representing plans. In Proc.
of the AAAI Workshop on Representational Issues for
Real-world Plannning Systems, pages 28–33.
Hartanto, R. (2009). Fusing DL Reasoning with HTN Plan-
ning as Deliberative Layer in Mobile Robotics. PhD
thesis, Universit
¨
at Osnabr
¨
uck.
Hartanto, R. and Hertzberg, J. (2009). On the benefit of
fusing dl-reasoning with htn-planning. In B. Mert-
sching, M. H. and Aziz, Z., editors, Lecture Notes
in Artificial Intelligence, volume 5803, pages 41–48.
Springer-Verlga Berlin Heidelberg.
Moreno, R., Borrajo, D., and Meziat, D. (2000). Process
modelling and AI planning techniques: A new appro-
ach. In Proc. 2nd International Workshop on Infor-
mation Integration and Web-based Applications and
Services, Indonesia.
Motta, E. (1997). An overview of the OCML modelling
language. Technical report, KMI.
OMG (2015a). OMG systems modeling language (SysML)
version 1.4.
OMG (2015b). Unified modeling language (UML) version
2.5 modeling language (SysML) version 1.4.
Rajhpathak, D. and Motta, E. (2004). An ontological forma-
lization of the planning task. In Proc. of the Interna-
tional Conference on Formal Ontology in Information
Systems (FOIS), Torino, Italy.
S
´
anchez-Ruiz, A., Gonz
´
alez-Castro, P. A., and D
´
ıaz-
Aguado, B. (2007). Planning with description logics
and syntactic updates.
Sirin, E., Parsia, B., Wu, D., Hendler, J., and Nau, D.
(2004). HTN planning for web service composition
using SHOP2. Journal of Web Semantics, 1(4):377–
396.
Tate, A. (1996). Towards a plan ontology. AI*IA Notizie
(Journal of the Italian Association for AI, 9(1).
Tate, A. (1998). Roots of SPAR - shared planning and acti-
vity representation. The Knowledge Engineering Re-
view, 13(1):121–128.
Thorisson, K. R., Bieger, J., Thorarensen, T., Sigurdardot-
tir, J. S., and Steunebrink, B. R. (2016). Why artificial
intelligence needs a task theory and what it might look
loke. In Artificial General Intelligence, number 9782
in LNAI, pages 118–128. Springer International Pu-
blishing.
Valente, A. (1995). Knowledge-level analysis of planning
system. SIGART Bulletin, 6(1):33–41.
W3C (2012). OWL 2 Web Ontology Language, second edi-
tion edition.
KEOD 2018 - 10th International Conference on Knowledge Engineering and Ontology Development
190
