
TS Artificial Neural Networks Classification: A Classification
Approach based on Time & Signal
Fatima Zahrae Ait Omar and Najib Belkhayat
Cady Ayad University, Marrakech, Morocco
Keywords: Artificial Neural Networks, Architectures, Classification, Artificial Intelligence, Prediction, Deep Learning.
Abstract: Artificial neural networks (ANN) have become the state-of-the-art technique to tackle highly complex
problems in AI due to their high prediction and features’ extraction ability. The recent development in this
technology has broadened the jungle of the existing ANNs architectures and caused the field to be less
accessible to novices. It is increasingly difficult for new beginners to categorize the architectures and pick the
best and well-suited ones for their study case, which makes the need to summarize and classify them
undeniable. Many previous classifications tried to meet this aim but failed to clear up the use case for each
architecture. The aim of this paper is to provide guidance and a clear overview to beginners and non-experts
and help them choose the right architecture for their research without having to dig deeper in the field. The
classification suggested for this purpose is performed according to two dimensions inspired of the brain’s
perception of the outside world: the time scale upon which the data is collected and the signal nature.
1 INTRODUCTION
Artificial intelligence has stolen the show recently
and been a subject of an intensive media hype. It is
one of the newest and most fertile fields of research,
attracting thusly more people in and making huge
advances. AI aims to automate tasks performed by
humans (Chollet, 2018) and circles as such machine
learning and deep learning applications, to which
ANN belongs. Learning in ML and DL is broadly
classified as supervised and unsupervised. Supervised
learning consists of training a model to predict an
output based on a given input while unsupervised
learning is used to recognize the underlying structure
or pattern in the data.
Artificial neural networks are an inspiration of the
actual neural networks of the brain (Gerven et al.,
2018), seeing that the animal brain learns due to
experience made researchers strongly believe that
artificial neural networks might be a huge step
towards the big dream of building an intelligent
machine. The human brain is composed of 100 billion
cell known as neurons (Blinkov S. M., 1998). Each
neuron can reach a 200000 connection with other
neurons, composing in that way large networks to
process different kinds of information coming from
our five senses. These complex interactions between
neurons is what makes the human being able to store
information, think and learn from past experiences to
perform future actions (Sporns, 2011).
The fundamental processing element of an ANN
is an artificial neuron, it translates the flow of a
natural neuron. The natural neuron receives input
signals through its dendrites, processes them in the
soma and outputs them to the axon to be sent out
through synapses to other neurons. Likewise, the
artificial neuron receives the Data in the input layer,
inputs multiplied by their connection weights are then
fed to an activation function (sigmoid, hyperbolic,
ReLU, hard limiter…) which is an algorithm that
adjusts the input and turns it into a real output. The
error of the prediction is calculated and back-
propagated to modify the weights of another cycle.
The same operation is repeated until a desired
accuracy is achieved.
A network is a system composed of many
interconnected neurons, ANN is thusly a network of
interconnected neurons organized in layers: input
layer, hidden layer and output layer. Unlike other
traditional AI algorithms, ANN has a high ability to
extract features on its own and learn the underlying
rules in the data. This is one the advantages that make
of it the ideal technique that is driving AI
advancement nowadays. Therefore, as a hot area of
research, ANN encompasses now a large variety of
178
Omar, F. and Belkhayat, N.
TS Artificial Neural Networks Classification: A Classification Approach based on Time & Signal.
DOI: 10.5220/0006927701780185
In Proceedings of the 10th International Joint Conference on Knowledge Discovery, Knowledge Engineering and Knowledge Management (IC3K 2018) - Volume 1: KDIR, pages 178-185
ISBN: 978-989-758-330-8
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

architectures that have appeared to tackle specific
tasks. Such a progress is solving problems that are
more complicated but is making the field less
accessible to non-experts, students, and non-
researchers. The need to classify the existing
architectures and clarify their applications is thus
increasing.
The first part of this paper is a literature review
that will introduce the reader to the most used ANN
architectures and previous attempts to classify them.
In the second part, our aim is to give the reader a
roadmap that will clear up the use case of each
architecture. The classification we suggest for this
purpose is inspired of the human perception of the
external world, which is the way we collect data
through our five senses and process it in the brain.
Our five senses are the tools through which we
perceive the outside world, sensing organs receive
information in different forms: light patterns, sound
waves, tactile sensations, chemicals from the air and
chemicals from the food (Goldstein et al., 2009 )
(Gregory, 1987). Each organ contains some particular
local nerve cells called peripheral neurons. Those
local neurons are in charge of preprocessing the
information received, turning it into a signal and
passing it in to the cortex. For example, our eyes
capture the light of a car on the street, the peripheral
neurons will translate it into an electrical signal and
send it to the brain to process it, the brain will decide
then that it is a car and spot its location in each
moment in time, as it is moving.
As mentioned previously, ANNs are an
inspiration of the human brain working mechanisms.
They act like biological neurons to extract
information and they have the same standard
components. However, to process raw data that has
not been preprocessed yet, they need special
architectures that are adapted for each form like
images, audios and text. It is also necessary to
consider the time scale of the data to put it in a proper
context.
2 ARTIFICIAL NEURAL
NETWORKS
CLASSIFICATION:
A LITERATURE REVIEW
Different architectures of artificial neural networks
are used in the literature for the same final aim, which
is machine learning, but in different contexts. Each of
the architectures is a special structure of neurons,
arranged in a way to handle a particular data. Since
the first work of McCulloch and Pitt (McCulloch and
Pitts, 1943), active research in the field has never
stopped developing new models and improving
previous ones to better fit the data and optimize
hyper-parameters. Choosing the best suited
architecture for each problem has thus become a
struggle for new beginners, who have to study every
possible case to end up with the right choice. The two
following sections will contain a brief description of
the most used ANN architectures in the literature and
a broad presentation of previous attempts to classify
them.
2.1 ANNs Most Used Architectures
The core structure of an ANN is typically represented
as a couple of layers, the first is used to input data, the
last is an output producer and any layers in between
are called hidden layers which are in charge of
extracting useful features (Zell, 1994). The flow in
the network goes in two directions, forward to do
prediction and backward for training (Werbos, 1975).
Therefore, the different existing architectures are
variants of this structure, and the most commonly
used ones are: Multilayer perceptrons, Radial basis
function network, Convolutional neural networks,
recurrent and recursive neural networks.
2.1.1 Multilayer Perceptron
The Multilayer perceptron (MLP) is a feed-forward
architecture, information in the network is allowed to
move only in the forward direction. MLP consists of
multiple layers with each layer is composed of
multiple processing elements called perceptrons
(Rosenblatt, 1958). Each perceptron is a
computational unit that sums the weighted input and
feeds it to an activation function to produce an output.
The output of each neuron is given by the formula:
.
(1)
In a MLP network, all neurons in each layer are
connected to all neurons in the next one (see figure 1)
and a bias neuron is generally added in each layer
except in the input.
Different activation functions can be
accommodated in the MLP, the simplest one is the
step unit, which is a threshold that outputs the result
only if it exceeds a certain value and is mainly used
for linear problems. Other non-linear functions like
Sigmoid, Tanh and ReLU are the most commonly
used for being able to learn non-linear complex
patterns in the data.
TS Artificial Neural Networks Classification: A Classification Approach based on Time & Signal
179
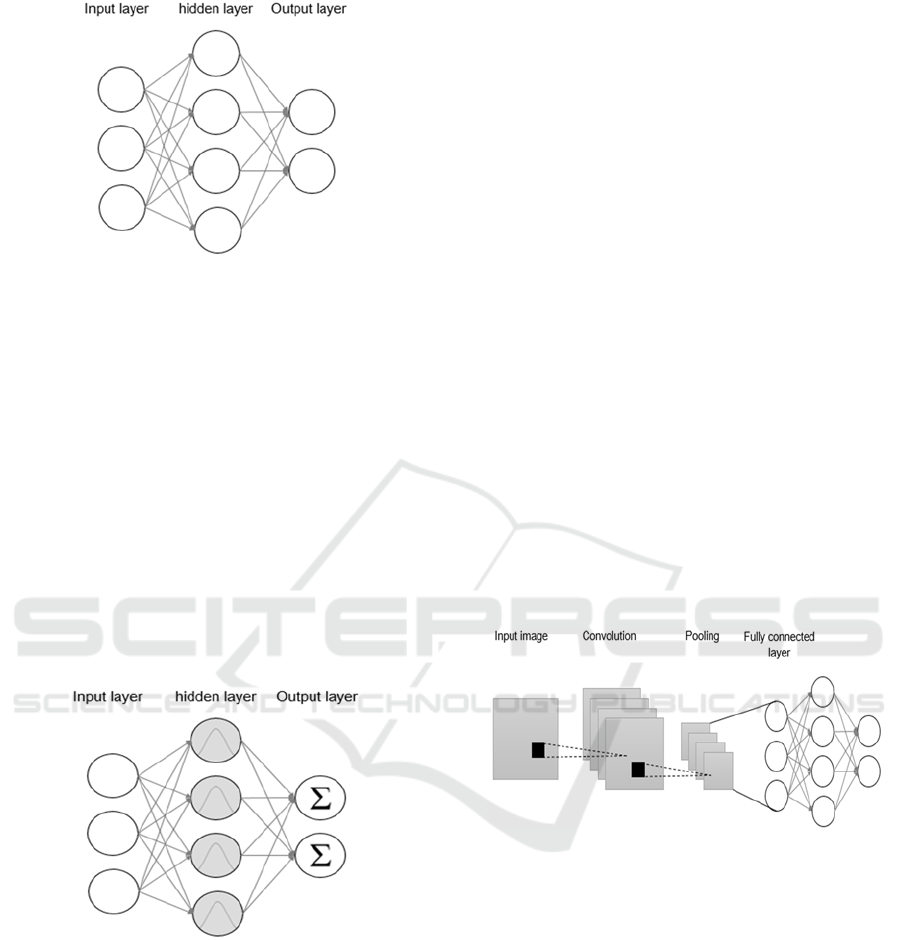
Figure 1: MLP architecture.
To train MLPs, we want to find weights so that the
cost function is as close as possible to 0. To do that,
an approach called Back-propagation is used (D.
Rumelhart, 1986). Back-propagation consists of
propagating the derivatives of the cost function to
compute the part of the error that each weight is
responsible for and then update them to produce a
better prediction.
2.1.2 Radial Basis Function Network
Radial Basis Function Network (RBFN) are another
feed-forward network, it shares the main structure
with MLPs, comprising many fully interconnected
layers, an input layer a hidden layer and an output
layer.
Figure 2: RBFN architecture.
RBFNs use a radial basis function as an activation
function (Broomhead, 1988), which makes their
concept unique and somewhat intuitive. The radial
function is generally taken as a symmetric bell-
shaped (Gaussian) function, It computes the radial
distance between each input vector and the centers
(prototypes) of the hidden units which are determined
with a clustering over the training samples, so the
center of the unit is actually the center of a given
cluster. The distance refers to how similar is the input
vector to the center vector, if they are very similar
than the value will be close to one but as the input
vector is far from the prototype as the value will be
close to zero. Then each of the hidden units outputs
its result to the output layer that will apply a linear
weight for each neuron and compute the weighted
sum (see figure 2), which will be typically the score
for the given input to belong to a given class
(Broomhead et al., 1988; Schwenker et al., 2001).
2.1.3 Convolutional Neural Networks
Standard ANNs we saw previously take input vectors,
process them through a number of fully connected
hidden layers and send them out to an output layer.
Those networks can still tackle image classification
but only when the number of pixels is not very large.
Therefore, when we have a colored 200x200 pixel
image, flattening it would give a 120,000 vector,
which is very difficult to manage for a regular ANNs
and would lead to over-fitting the model. Here comes
the advantage of Convolutional Neural Network
(CNN) in containing a three dimensional partially
connected layers of neurons and reducing features
number (LeCun, 1998), by the end of a CNN the
image is reduced to one single vector that contains the
most expressive features, which is easy to process by
a fully connected neural network later.
Figure 3: Convolutional Neural Network Architecture.
The CNNs architecture is a process of many steps
that starts with convolution and then pooling,
flattening and finally a fully connected layer (see
figure 3) like the one we have seen in the MLP
(LeCun, 2013).
Convolutional Layer: this layer consists of a set
of feature maps that are generated by running
multiple filters over the same image. Each filter is a
feature detector that is used to select only a special
kind of features (Aghdam et al., 2007).
Pooling: the pooling layer is also called down-
sampling layer for its ability to reduce the size of the
feature maps and hence control overfitting. Pooling is
done by running a small sized filter over the feature
maps that would condense their values using a max or
an average operation (Krizhevsky, 2013).
KDIR 2018 - 10th International Conference on Knowledge Discovery and Information Retrieval
180
Fully connected layers: the convolution and the
pooling may be applied multiple times before
producing a shrined feature maps containing the most
expressive features. Each matrix is then flattened into
one column vector that will be processed by a fully
connected neural network. The regular ANN at the
end of the CNN is not the only step concerned by the
weights training but all the process back to the
convolutional layer and the weights used to generate
the feature maps.
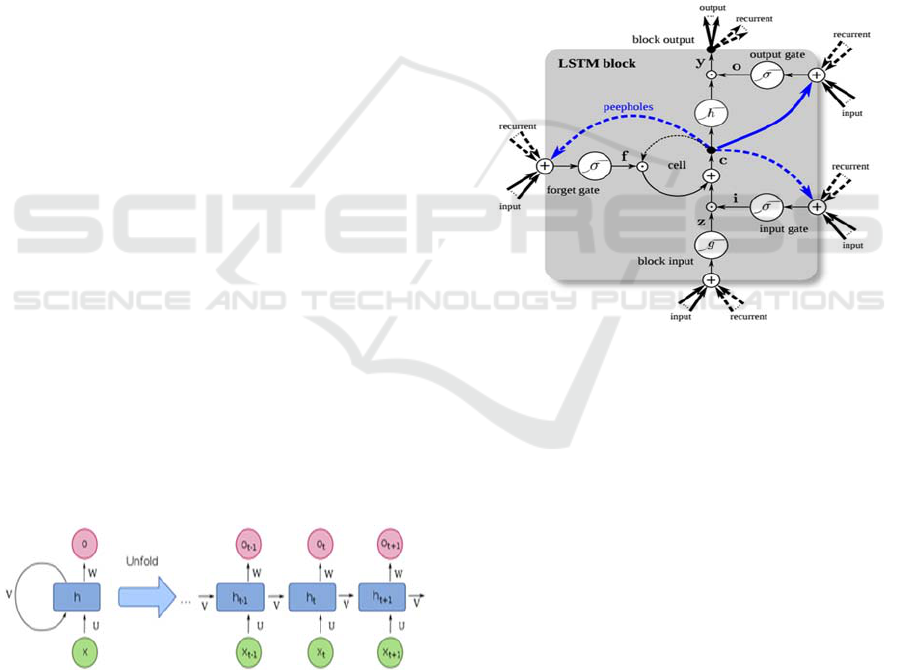
2.1.4 Recurrent Neural Networks
Recurrent Neural Networks (RNN) (Elman, 1990) are
another class of ANNs that is more adapted and
optimized to deal with sequence data such as speech
(Li et al., 2014),text (Graves et al., 2009) and stock
market (Hsieh et al., 2011). Like any other ANN,
RNN is composed of an input layer, hidden layer and
an output layer. What makes it different is a loop
around the hidden layer (figure 4) that enables it to
feed into itself and capture long-term dependencies.
The figure 4 shows a network of one recurrent hidden
layer that was unfolded through time. For example,
is the state of the hidden neuron at the time step t,
it receives the input of the current time step
and the
state at the previous time step
.
RNNs or fully RNN called also Valilla RNNs are
generally known as hard to train though. The big
problem with their training is the vanishing or
exploding gradient. Weights of the network are
generally initialized to some small values, so when
updating weights several times into the past, they get
very small and diminished or they get very large and
unstable, therefore, the first weights are poorly
trained or not at all and information is lost on the way
back. To solve this problem other extensions of
recurrent neural networks have appeared, of which
long short-term memory (LSTM) and Gated
Recurrent Unit (GRU) are the most considered.
Figure 4: Recurrent Neural Networks architecture.
Long Short-Term Memory (LSTM): this network
addresses the problem of vanishing/exploding
gradient by attaching an LSTM block to each
recurrent unit. An LSTM contains a cell memory and
3 gates; input gate, output gate and a forget gate( See
figure 5), each of which uses a sigmoid function to
regulate the flow of information going into and out of
the cell memory (Hochreiter, 1997). The forget gate
would decide how much information of the previous
time step will be remembered or forgotten, so 0
means clear all data, 1 means keep all data and so
on… The input gate would decide how much
information coming from the RNN output should be
allowed into the memory cell and the output gate
would decide how much information would be
outputted from the cell memory back to the RNN unit.
This architecture allows the network to remember
only useful information and forget information that is
no longer needed which would thus facilitate training
the data. LSTM is therefore a mechanism to control
the memory of the network and limit long-term
dependencies problems
Figure 5: LSTM block (Klaus Greff, 2015).
Gated Recurrent Unit (GRU): like in LSTM,
GRU uses gates as well to control the flow of the data
but reduces the number to 2 instead of 3 gates (Chung,
2014). GRU has only an update gate and a reset gate
without having an output gate neither a separate
memory cell, which exposes the whole content of the
hidden neuron and reduces computations, thus makes
this model simpler and faster to train. Others than
LSTM and GRU, there are many variants of RNNs
that are useful for the same context but with different
manipulation of the memory aspect, like the
following listed models:
Liquid state machine
Echo state machine
Elman and Jordan networks
Neural Turing machines
Neural history compressor
Multiple timescales model
TS Artificial Neural Networks Classification: A Classification Approach based on Time & Signal
181

2.1.5 Recursive Neural Network
Recursive Neural Network (RecNN) is another kind
of neural networks that falls within the category of
RNN, both have the same core idea but with different
structures. RecNNs is a tree-like network (Frasconi,
1998), It is more suitable and commonly used for data
with a hierarchical structure.
Figure 6: Example of a RecNN architecture.
As shown in Figure 6, the network is composed of
roots and leaves groups, also called parents and
children nodes. In the first level, the Leaves are vector
representations of the words “the” and “Window”,
they are concatenated, multiplied by a weight matrix
and fed to an activation function (Tanh) in the root to
produce two outputs: the class of the input and the
score of the parsing. The score represents the quality
of parsing, based on what the network will pick up the
best parse to merge it with another representation in
the next level and so on and so forth. The score is also
useful for training the network through
backpropagation by comparing the actual structure of
the sentence with the output of the network, the best
scored parses are generally the closest to the real
sentence.
2.2 Point at Issue
The different ANN architectures presented in this
setion are the most popular ones used for supervised
learning. Each one of them is adjusted to tackle a
specific problem. Even after reading the short
description provided above of how each architecture
works, a new ANN researcher or a data science
student would still be unable to determine which one
of them is best suited for which problem. It would
take them more research and more blind applications
to settle on one, which is time and effort consuming.
In this paper, we aim to classify the ANN applications
according to some well-defined variables so that
beginners in the field and researchers may finger the
class where their problem belong and go straight to
the relevant architecture. It is also a new approach to
structure ANN and deep learning courses for its
purpose to give a clear map of what is out there and
how it can be used.
3 ANN CLASSIFICATION:
RELATED WORK
The need to outline the different existing ANN
models has grown at the hand of their undeniable
efficiency and the rising confusion that novices go
through once joining the field. Classification of those
existing architectures has been done according to
different variables in the literature. Most of the
attempts aim to summarize what is out there for the
readers and help them track the fast advances in the
field. We mention some of them in the coming lines
and their main missed points.
The Neural network zoo (Veen, 2016) is a typical
exhaustive classification of ANNs architectures. The
aim of the article is to help the reader keep track of
the architectures popping up every now and then,
presenting them in simple visualizations and short
explanations. The detailed list in the article might be
useful for an expert but is not the right place where to
start for a newbie. The chart does not gather the
variants of the same family of ANNs together and
does not give the typical use case for each
architecture.
Deep learning timeline (Vázquez, 2018) is
another kind of classification that places the
architectures on a timeline according to their
invention date. The timeline is a useful tool to
introduce the existing architectures and their
improved versions over time. However, it would take
the readers more than just knowing the ANN
evolution to pick the applicable architecture for their
problems. The article does not give a description of
the mentioned architecture and doesn’t specify the
applications of each one which leaves the readers
with only a big idea of what ANNs are, their history
but the best applicable architecture for each case is a
mystery that they should clear up elsewhere.
The jungle of ANNs architectures is very large
and growing fast with all the active research that is
done in the field. Therefore, new beginners are lost
and overwhelmed when trying to pick the best and
well-suited architecture for their research case. The
existing classifications are not very practical to meet
this aim, either for being too detailed or for being too
introductive. We have seen that a list, a history
timeline and a chart were not very efficient to provide
guidance for the readers, so it’s time to come up with
KDIR 2018 - 10th International Conference on Knowledge Discovery and Information Retrieval
182
a new approach to achieve this goal in a way to clear
up confusions and structure the learning of ANNs.
4 TOWARDS A NEW APPROACH
FOR ANN CLASSIFICATION
4.1 TS-ANN Classification: A
Classification Approach based on
Time & Signal
Electrical signals travel along the human body
through neuronal synaptic connections to transport
information. Signals going to the brain carry
information captured by sensing organs and has been
pre-processed by the peripheral neurons to be
processed by the brain. Therefore, the data is first
received as a raw signal such as voice, image or
chemicals to be pre-processed into a signal that the
brain can understand.
As the data is perceived by the human brain in
different sources, some of those sources are also fed
to the ANNs to perform similar tasks like speech
recognition, image recognition and natural language
processing, which are all forms of unprocessed data.
In the other hand, Pre-processed data is a more
organized data presented as a fixed field of
measurements.
The time scale upon which the data is collected is
also a deciding variable to choose the appropriate
ANN architecture. The time scale is cross-sectional
when the data is collected at the same point in time
for different features and time series when collected
over time for the same features.
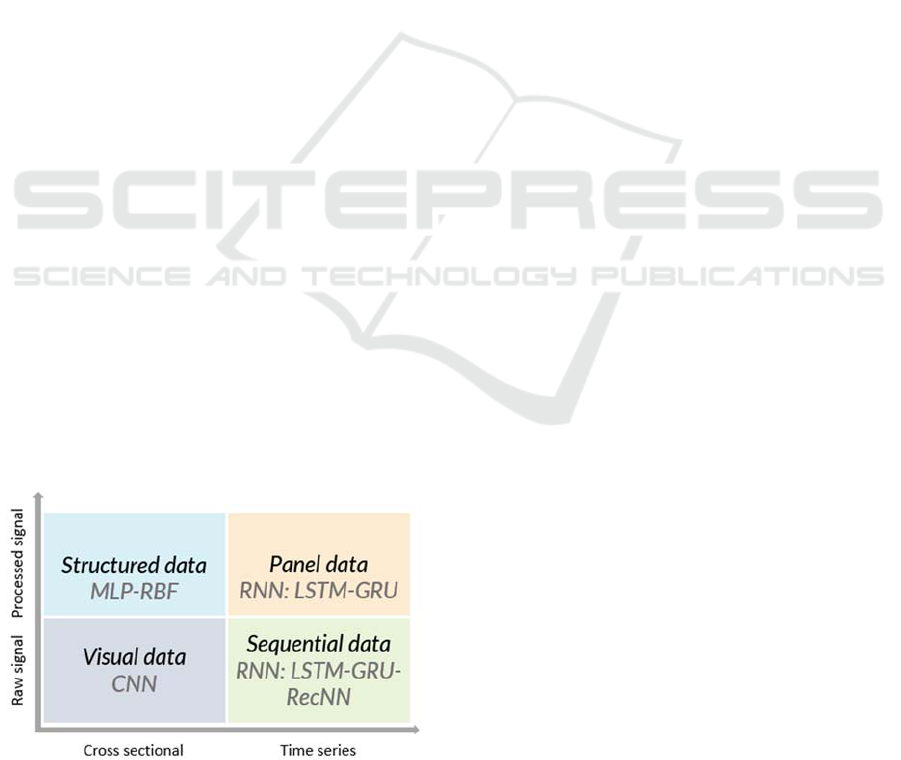
According to both variables, the signal (data)
nature and the time scale, we define four major
classes: Structured data, panel data, visual data and
sequential data as shown in figure 7.
Figure 7: ANNs classification matrix.
4.1.1 Structured Data
Structured data refers to data stored in spreadsheets
and databases and organized in rows of records, for
example: advertising data, credit scoring data, cancer
data …. The reason behind ranking structured data as
a cross-sectional pre-processed signal is for being
presented as a fixed field of structured measurements
collected for different features at the same point in
time. This type of data is typically used in standard
regression and classification problems and thus, they
generally do not need very complex and deep
networks, neither a lot of preprocessing and
engineering, MLP and RBF are therefore the most
commonly used networks for this case.
4.1.2 Panel Data
Panel data is also a structured data but collected over
time for the same set of features in order to capture
their evolution. As such, panel data is generally used
for forecasting in business and social studies for an
upcoming period of time such as companies’
performance data, stock market data, countries data…
This kind of data has a flexibility advantage, it can be
considered as a structured cross-sectional data to
analyze the differences between observations and it
can be considered as time series to capture the
differences over time. Fully RNN and its variants
LSTM and GRU are gaining popularity to handle this
kind of data for their power to capture the impact of
previous occurring values on the following one.
4.1.3 Visual Data
The human ability to visualize things is one of the
wonders of the human brain. This human gift is due
to the visual cortex of the brain, once the eyes capture
the light coming from our environment, the light
information goes through a reprocessing process and
then it is sent out to the neural networks in the visual
cortex to analyze it and make sense out of it (Hubel,
1968). When it comes to the computer, the vision
ability is not as intuitive as it seems for us. The
computer is unable to see the whole picture but only
the intensity of pixels that compose it. It also faces
other challenges to distinguish contours of the object,
separate it from its background and give the right
guess when parts of the image are missing.
Now thanks to the advancements in artificial
neural networks, an accurate computer vision is no
longer a big challenge. Convolutional neural
networks is an ANNs architecture that is beating all
the traditional methods as far as accuracy is
concerned. CNNs can tackle other tasks as well, like
TS Artificial Neural Networks Classification: A Classification Approach based on Time & Signal
183

video analysis and natural language processing but
computer vision is their field of expertise as they were
specifically designed to deal with image data.
4.1.4 Sequential Data
Speech or Audio is the way we communicate as
humans, training accurate models to communicate
with machines efficiently has been a great
achievement. Audio is however perceived by the
machine as a sequence of frequencies. At this point,
all networks we have seen need fixed size vector
representations of the data to learn. However, most
of our daily life activities require an analysis of
sequences like text, speech and videos. Sequential
data requires understanding of the previous elements
in the record to make sense out of it.
Long-term memory networks like MLP, RBF or
CNN are no longer the best in this case. Another
architecture of neural networks is the most commonly
used instead, which is RNN. Variants of Fully RNN
like LSTM and GRU present a better option though
to avoid the vanishing/exploding gradient problem.
Recursive neural networks are another variant as well
but are more adapted for text and natural language
processing, as they require an architectural structure.
TS classification as can be seen does not take the
existing architectures as a foundation but rather starts
with the data types inspired of the human perception
and defines each type according to two dimensions
(Time and signal) which results in four different data
types: structured, panel, visual and sequential. Each
of the architectures presented in the first part of this
paper is then affected to the data type that goes with
it. As such, the reader is not supposed to go through
all the architectures but just define to which type
belongs the study data and go straight to the relevant
ones.
4.2 TS-Classification: Example
Different artificial networks can be used for different
problems but this is intended to give the reader a clear
map of the most commonly used and the most
efficient and adapted architectures for each Data type.
Therefore, the classification is designed to help the
new beginners to identify the best suited ANN
architecture for their study case. For this matter, a
couple of questions should be answered first to
determine to which of the classes the data belong,
including:
• Does the data include the dependent variable?
• What is the data nature?
• What is the data time scale?
The first question will decide if the learning will be
supervised or unsupervised which is the first step to
eliminate a variety of irrelevant networks. The second
and third questions will position the data on the
classification matrix. The tree given by figure 8 is
suggested to help structure and guide the answers to
finally keep one option and its attributed networks.
This classification is a guideline to help non-
experts and democratize ANN applications for a large
public. It is not nevertheless exhaustive nor
restrictive, each of the architectures can still be used
for a different data class if the data is pre-processed
to fit it. The researcher is thus free to try different
architectures and keep the best as far as accuracy is
concerned.
Figure 8: ANNs Classification Tree.
5 CONCLUSION
Artificial neural networks are the strongest machine-
learning tool and the future of computing. A variety
of architectures is used in the literature, which makes
it hard for new researchers to choose the one that
applies. A classification summarizing and clearing up
the use case of each one has never been this crucial.
Many previous attempts tried to give a classification
of the existing architectures, by either listing them or
putting them on a timeline according to their creation
date. Both approaches were inefficient to achieve the
democratization aim for not setting clear criteria upon
which the architectures will be preferred.
In this paper, we have suggested a classification
based on the human brain perception of the most
popular existing architectures of ANNs to provide
guidance for new beginners and help them identify
the best-suited architecture for their study case. The
classification matrix is divided into 4 quadrants
KDIR 2018 - 10th International Conference on Knowledge Discovery and Information Retrieval
184

derived on the signal nature and time scale. As such,
the matrix accommodates 4 different data types:
Structured, panel, visual and sequential. Each of the
data types is adapted for a particular ANN
architecture within the scope of supervised learning.
Future research opportunities would be to enlarge the
criteria set of this classification approach and include
unsupervised learning architectures in the study.
REFERENCES
Baldi, P. P. (2003). The Pricipled Design of Large-Scale
Recursive Neural Networks Architectures-DAG-RNNs
and the Protein Structure Prediction Problem. Journal
of Machine Learning Research, 575-602.
Blinkov S. M., G. (1998). The Human Brain in Figures and
Tables: A Quantitative Handbook. New York: Plenum.
Broomhead, D. S. (1988). Radial basis functions, multi-
variable functional interpolation and adaptive
networks.
Chung, J. e. (2014). Empirical evaluation of gated recurrent
neural networks on sequence modeling. arXiv preprint
arXiv.
Costa, F. F. (2003). Towards Incremental Parsing of
Natural Language Using Recursive Neural Networks.
Applied Intelligence, 9-25.
D. Rumelhart, G. H. (1986). Learning Internal
Representations by Error Propagation.
Elman, J. L. (1990). Finding structure in time. Cognitive
science 14.2, 179-211.
Frasconi, P. G. (1998). A General Framework for Adaptive
Processing of Data Structures. IEEE Transactions on
Neural Networks, 768-786.
Gers, F. A., Schmidhuber, J., & Cummins, F. (2000).
Learning to Forget: Continual Prediction with LSTM.
Neural Computation, 2451–2471.
Gerven, M. v., & Bohte, S. (2018). Artificial neural
networks as models of neural information processing.
Frontiers in Computational Neuroscience.
Goldstein, J. R., Sobotka, T., & Jasilioniene, A. (2009). The
End of “Lowest‐Low” Fertility? Population and
development review, 663-699.
Hochreiter, S. a. (1997). Long short-term memory. Neural
computation 9.8 , 1735-1780.
Hsieh, T.-J., Hsiao, H.-F., & Yeh, C. (2011). Forecasting
stock markets using wavelet transforms and recurrent
neural networks. Applied Soft Computing, 2510-2525.
Hubel, D. H. (1968). Receptive fields and functional
architecture of monkey striate cortex. The Journal of
Physiology, 215-243.
Krizhevsky, A. (2013). ImageNet Classification with Deep
Convolutional Neural Networks.
LeCun, Y. (2013). LeNet-5, convolutional neural networks.
LeCun, Y. e. (1998). Gradient-based learning applied to
document recognition. Proceedings of the IEEE 86.11,
2278-2324.
McCulloch, W., & Pitts, W. (1943). A Logical Calculus of
Ideas Immanent in Nervous Activity. Bulletin of
Mathematical Biophysics, 115–133.
Richard Socher, A. P. (2013). Recursive Deep Models for
Semantic Compositionality Over a Sentiment
Treebank. Stanford University.
Rosenblatt, F. (1958). The perceptron: a probabilistic model
for information storage and organization in the brain.
Sporns, O. (2011). Networks of the brain. The M IT Press.
Vázquez, F. (2018, March 23). A “weird” introduction to
Deep Learning. Retrieved April 10, 2018, from
https://towardsdatascience.com/.
Veen, F. V. (2016, September 14). The neural netwok Zoo.
Retrieved April 10, 2018, from ASIMOV institute:
http://www.asimovinstitute.org/neural-network-zoo/
Chollet, F., 2018. Deep learning with Python. s.l.:Manning.
Gregory, R., 1987. Perception" in Gregory. Zangwill, p.
598–601.
Zell, A., 1994. Simulation of Neural Networks. s.l.:
Addison-Wesley.
Werbos, P., 1975. Beyond Regression: New Tools for
Prediction and Analysis in the Behavioral Sciences.
Schwenker, F., Kestler, H. A. & Palm, G., 2001. Three
learning phases for radial-basis-function networks.
Neural Networks, p. 439–458.
Aghdam, H. H. & Heravi, E. J., 2007. Guide to
convolutional neural networks: a practical application
to traffic-sign detection and classification. Cham:
Springer.
Graves, A. et al., 2009. A Novel Connectionist System for
Improved Unconstrained Handwriting Recognition.
IEEE Transactions on Pattern Analysis and Machine
Intelligence.
Klaus Greff, 2015. LSTM: A Search Space Odyssey. IEEE
Transactions on Neural Networks and Learning
Systems, pp. 2222 - 2232.
TS Artificial Neural Networks Classification: A Classification Approach based on Time & Signal
185
