
An Ontology-based Approach to Generate the Advanced Driver
Assistance Use Cases of Highway Traffic
Wei Chen
1,2
and Le
¨
ıla Kloul
1
1
Laboratory DAVID, Versailles Saint-Quentin-en-Yvelines University, 45, avenue des
´
Etats-Unis, 78000, Versailles, France
2
Institute of Technological Research SystemX, 8, Avenue de la Vauve, 91120, Palaiseau, France
Keywords:
Autonomous Vehicle, Ontology, Use Cases.
Abstract:
Autonomous vehicles perceive the environment with different kinds of sensors (camera, radar, lidar...). They
must evolve in an unpredictable environment and a wide context of dynamic execution, with strong interacti-
ons. In order to generate the safety of the autonomous vehicle, its occupants and the others road users, it is
necessary to validate the decisions of the algorithms for all the situations that will be met. These situations are
described and generated as different use cases of automated vehicles. In this work, we propose an approach
to generate automatically use cases of autonomous vehicle for highway. This approach is based on a three
layers hierarchy, which exploits static and mobile concepts we have defined in the context of three ontologies:
highway, weather and vehicle. The highway ontology and the weather ontology conceptualize the environ-
ment in which evolves the autonomous vehicle, and the vehicle ontology consists of the vehicle devices and
the control actions. To apply our approach, we consider a running example about the insertion of a vehicle by
the right entrance lane of a highway.
1 INTRODUCTION
Autonomous vehicles must evolve in an unpredicta-
ble environment and a wide context of dynamic exe-
cution, with strong interactions. Since the 1970s,
the research on autonomous vehicle became a ten-
tancy in the industry. After years of exploration,
certain progress has been made. In early 2018,
Audi expanded Traffic Light Information Vehicle-
to-Infrastructure (V2I) system to Washington (Krok,
2018). Nissan plans to continue the collaboration
with NASA to adapt NASA technology for use in
their Seamless Autonomous Mobility platform (Bar-
tosiak, 2018). Not only is the traditional auto industry
dedicated to this research domain, but other compa-
nies, such as Google and Intel, have also participa-
ted to the development of the autonomous vehicles.
Waymo, which started as Google’s self-driving car
project, canceled the design of the steering wheel and
pedals (Gain, 2017), which completely overturns the
design of traditional cars.
Recently, the world’s first driverless taxi was put
into use in Dubai (Caughill, 2017). Tesla has made
the first delivery of fifty (50) out of two hundreds
(200) vehicles to Dubai. The goal is for the cars to
evolve into a fully autonomous taxi service. Auto-
nomous vehicles are no longer just in the scenes of
science fiction movies. They come to real life and will
become more commonplace as ordinary cars. Howe-
ver, at the same time, autonomous vehicles brought
new problems to our lives, for example, the issue
of accident liability determination, and most impor-
tantly, the issue of safety.
The recent fatal crash in California of Tesla’s Au-
topilot System shows that safety assessment of intelli-
gent systems is a high-priority topic in the automated
vehicle industry. The driver’s hands were not detected
on the wheel for six seconds prior to the collision
(BBC, 2018) while the owners guide specifies that the
driver must keep the hands on the steering wheel at all
times (Tesla, 2018). The autopilot is not smart enough
to hold all the situations it meets. Human driver needs
to be involved at critical moments, but its attention
cannot be focused for a long time since most of the
time the driver has nothing to do in such vehicles.
To ensure the safety of the autonomous vehicle,
its occupants and the other road users, when autono-
mous vehicles evolve in the dynamic environment, it
is necessary to simulate all possible situations to test
and validate the decisions of the algorithms of the Ad-
vanced Driver-Assistance Systems (ADAS) inside the
vehicle. These situations are described and genera-
Chen, W. and Kloul, L.
An Ontology-based Approach to Generate the Advanced Driver Assistance Use Cases of Highway Traffic.
DOI: 10.5220/0006931700750083
In Proceedings of the 10th International Joint Conference on Knowledge Discovery, Knowledge Engineering and Knowledge Management (IC3K 2018) - Volume 2: KEOD, pages 75-83
ISBN: 978-989-758-330-8
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
75

ted as different use cases of automated vehicles. A
use case is defined as one or several scenarios app-
lied to functional ranges and behaviors to simulate the
ADAS. A scenario describes the temporal develop-
ment between several scenes in a sequence of scenes.
In this work, we propose an approach to gene-
rate automatically use cases of autonomous vehicle
in the context of highway. This approach is based on
a three layers hierarchy, which exploits static and mo-
bile concepts we have defined in the context of three
ontologies: highway, weather and vehicle. We con-
sider a running example: “Insertion of vehicle by the
right entrance lane of a highway”, to show the con-
cepts and their relationships in the ontologies. We in-
troduce the approach of use cases generation with dif-
ferent scenarios constructed using several scenes and
we show how to apply this approach on the running
example.
Structure of the paper: Section 2 is dedicated to
Related Works. In Section 3, we describe our run-
ning example. The three ontologies are presented in
Section 4. Our approach of use cases generation is
presented in Section 5. Finally, we conclude our work
in Section 6.
2 RELATED WORKS
Several researchers have used ontologies for the con-
ceptualization of the ADAS or the control of the au-
tonomous vehicle.
An ontology of recognition for the ADAS system
is presented in (Armand et al., 2014). The authors de-
fine an ontology composed of concepts and their in-
stances. This ontology includes contextual concepts
and context parameters. It is able to process human-
like reasoning on global road contexts. Another on-
tology is proposed by Pollard et al. (Pollard et al.,
2013) for situation assessment for automated ground
vehicles. It includes the sensors/actuators state, envi-
ronmental conditions and driver’s state. However, as
the classes of both ontologies are highly generalized,
they are not enough to describe use cases to simulate
and validate ADAS.
To build a knowledge base for smart vehicles and
implement different types of ADAS, Zhao et al. (Zhao
et al., 2015) proposed three ontologies: map ontology,
control ontology and car ontology. They focus on al-
gorithms for rapid decision making for autonomous
vehicle systems. They provide an ontology-based
knowledge base and decision-making system that can
make safe decisions about uncontrolled intersections
and narrow roads. However, the authors did not con-
sider the equipment of the road infrastructure in their
map ontology, for example the traffic signs which are
an important part for use cases construction.
Morignot et al. (Morignot and Nashashibi, 2012)
propose an ontology to relax traffic regulation in unu-
sual but practical situations, in order to assist drivers.
Their ontology represents the vehicles, the infrastruc-
ture and the traffic regulation for the general road.
It is based on the experience of the members of the
lab with driving license, not based on a texts corpus.
That may be useful for modelling the concepts invol-
ved in traffic regulation relaxation, but we need more
rigorous ontologies for modelling the concepts invol-
ved in general situations.
In (Bagschik et al., 2017), the authors propose,
using ontology, to create scenarios for development of
automated driving functions. They propose a process
for an ontology based scene creation and a model for
knowledge representation with 5 layers: road-level,
traffic infrastructure, temporary manipulation of the
first two levels, objects and environment. A scene is
created from first layer to fifth layer. This ontology
has modelled German motorways with 284 classes,
762 logical axioms and 75 semantic web rules. A
number of scenes could be automatically generated
in natural language. However, the natural language
is not a machine-understandable knowledge and the
transformation of natural language based scenes to si-
mulation data formats with such a huge ontology is a
tremendous work.
In (H
¨
ulsen et al., 2011) and in (Hummel et al.,
2008) use a description logic to describe the sce-
nes. The first work provides a generic description of
road intersections using the concepts Car, Crossing,
RoadConnection and SignAtCrossing. They use des-
cription logic to reason about the relations between
cars and describe how a traffic intersection situation is
set up in this ontology and define its semantics. The
results are presented for an intersection with 5 roads,
11 lanes and 6 cars driving towards the intersection.
Hummel et al. (Hummel et al., 2008) also propose
an ontology to understand road infrastructures at in-
tersections. This approach focuses on the geometri-
cal details related to the multilevel topological infor-
mation. It presents scene comprehension frameworks
based on the description logic, which can identify un-
reasonable sensor data by checking for consistency.
All these ontologies are limited to the situation of in-
tersection which is not enough to simulate an environ-
ment and validate the ADAS.
KEOD 2018 - 10th International Conference on Knowledge Engineering and Ontology Development
76
3 RUNNING EXAMPLE
We consider the situation “Insertion of vehicle by the
right entrance lane of a highway” as the running ex-
ample. It is in daylight and the temperature is c
◦
C.
The humidity is h % and the pressure is p mPa. The
wind speed is v
w
km/h and its direction is d
w
◦
(from
0 to 360
◦
, 180
◦
refers to a southerly wind).
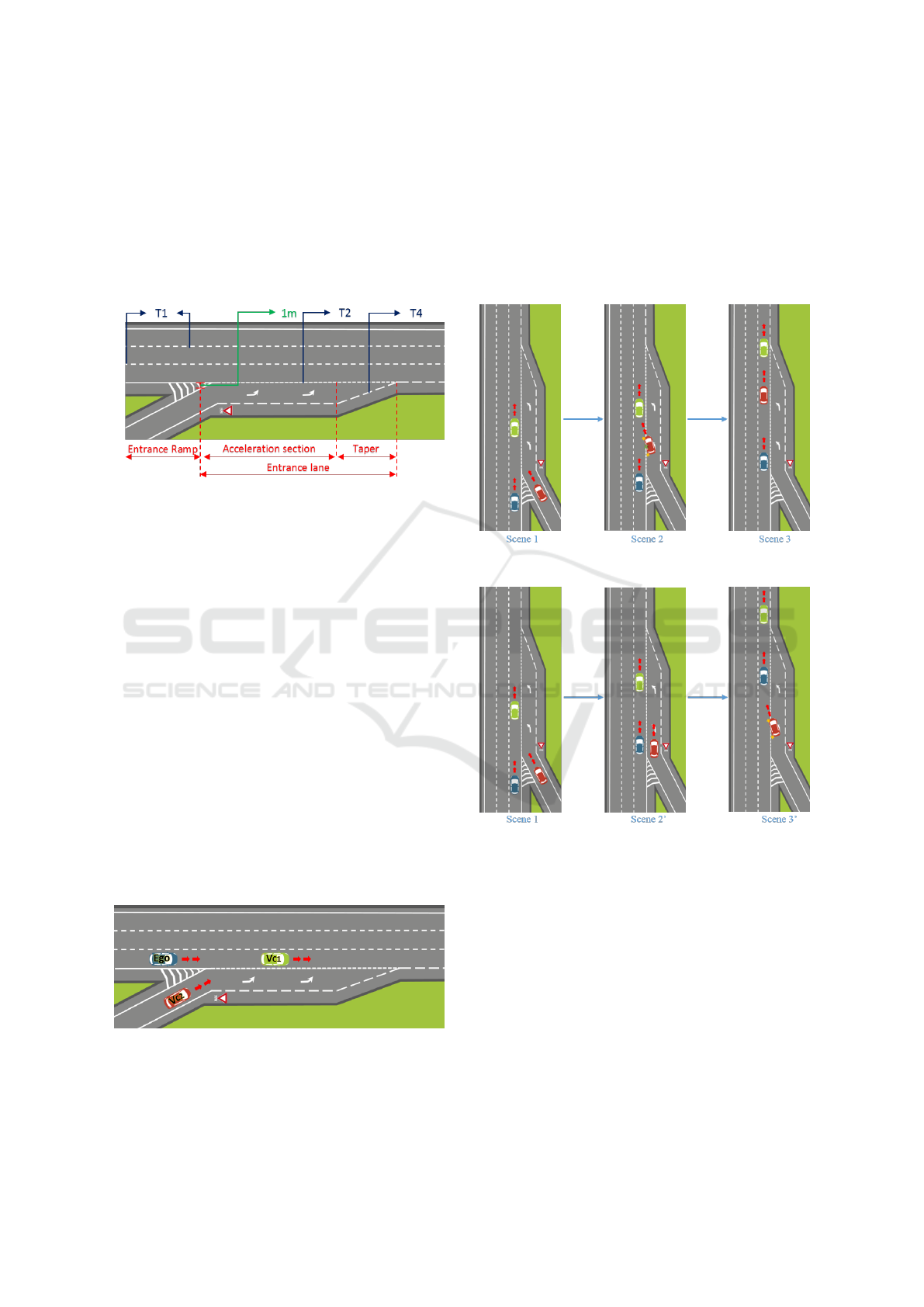
Figure 1: Scenography of the running example.
The highway is separated into two carriageways
by median. In the scenography of this running ex-
ample (Figure 1), a portion of one carriageway is se-
lected. The left hard shoulder is located on the imme-
diate outside of the median. The edge of the left hard
shoulder is marked by two single solid white lines.
This carriageway has three main lanes and an entrance
lane. There is a chevrons marking placed between the
outside lane and the entrance lane. The entrance lane
is composed of an acceleration section and a taper.
An entrance ramp is connected with the entrance lane
at the point where the width of the chevrons reduces
to one meter (1m). The right soft shoulder is located
on the immediate outside of the right hard shoulder.
In the beginning of the acceleration section, a give
way sign is placed on the right soft shoulder. There
are two deflection arrows marking on the acceleration
section. The types of dashed lines are provided on Fi-
gure 1. Their definitions are those provided in the offi-
cial French document for road symbols (Minist
`
ere de
l’
´
ecologie, 1988).
Figure 2: Initial scene of the running example.
In the initial scene (Figure 2) of running exam-
ple, the Ego vehicle (blue) rolls on the right lane of
a separated lane road. The speed of Ego is given
by v
e
km/h on the portion which speed is limited to
130 km/h. The System Traffic Jam Chauffeur (TJC)
is active and regulates the speed of Ego with respect
to a target vehicle V c
1
(green) that is located d
1
m in
front of Ego. A third vehicle V c
2
(red) arrives on the
entrance lane and wants to insert the highway. V c
1
and V c
2
roll at a speed equal to v
1
km/h and v
2
km/h,
respectively.
Figure 3: Vehicle insertion before Ego.
Figure 4: Vehicle insertion after Ego.
We suppose that v
e
= v
1
= v
2
in this running ex-
ample. From the initial scene, there are two possi-
bilities: V c
2
inserts before or after Ego. In the first
case (Figure 3), Ego decelerates and V c
2
turns on the
left direction lights and begins to insert before Ego.
It follows that the radar of Ego detects this vehicle
which becomes the new target vehicle. Ego follows
V c
2
. In the second case, if Ego makes the decision to
accelerate, obviously this action will lead to another
scene and influence the whole scenario as showed in
Figure 4. Of course Ego may do nothing and conti-
nue driving. In this case, it is the turn of V c
2
to make
decision to decelerate or accelerate. There are also
situations where both Ego and V c
2
do the same acti-
An Ontology-based Approach to Generate the Advanced Driver Assistance Use Cases of Highway Traffic
77

ons. For example, they accelerate. But eventually all
these situations will render in either of two possibili-
ties: V c
2
inserts before or after Ego. Note that Ego
cannot change to the left lane because on that lane,
there is no vehicle and thus no possible target vehicle
to follow.
4 ONTOLOGIES
An ontology is a structural framework for the repre-
sentation of knowledge about a domain. It is often
conceived as a set of concepts with their definitions
and relationships (Uschold and Gruninger, 1996). In
this work, we define three ontologies: highway onto-
logy and weather ontology to specify the environment
in which evolves the autonomous vehicle, and the
vehicle ontology which consists of the vehicle devices
and control actions. The ontologies we have defined
have been edited in Protege (protege.stanford.edu,
2012).
4.1 The Concepts
In the following, we describe the concepts of the three
(3) ontologies.
Highway Ontology: The highway infrastructure
consists of the physical components of highway sy-
stem providing facilities essential to allow the vehicle
driving on the highway. We have built highway onto-
logy based on the French official documents (Minist
`
ere de l’
´
ecologie, 1988) (Minist
`
ere de l’
´
equipement,
2000). This ontology involves four main concepts:
RoadPart, Roadway, Zone and Equipment. The
concept RoadPart refers to the long profile of the
highway. We consider that the highway is compo-
sed of connected segments and interchanges. There
are two types of interchanges on highway: Branch
and Ramp. The branch connects to another highway
and the ramp connects to other types of roads. The
concept Roadway refers to the longitudinal profile
of the highway. The special areas on the highway
(Toll, Sa f etyArea, RestArea, etc.) are classified
in the concept Zone. The concept Equipment re-
fers to the facilities that guarantee the normal ope-
ration of highways. It could be Barrier, Fence,
Tra f f icSymbol, Lighting or EmergencyTelephone.
The concepts of this ontology are defined in terms
of entity, sub-entities and properties. For example,
the concept EntranceLane is defined as in Table 1.
In the running example, the ID of EntranceLane is
EnLane
1
.
Table 1: Definition of the concept EntranceLane.
Concept EntranceLane
Entity entrance lane
Definition A lane which allows vehicles
accessing a highway to accelerate
until integrating the highway flow.
Properties ID, Alignment (Horizontal & Ver-
tical), Length, Width, SpeedLimit
Sub-entities Acceleration Section, Taper
Figure 5 shows all the fifty-four (54) concepts we
have defined for highway ontology. The framed con-
cepts are the concepts that can be used for the running
example.
Weather Ontology: The weather describes the
state of the atmosphere at a particular place and time.
Some phenomena influence the visibility of captors
Figure 5: Concepts of highway ontology (framed concepts for running example).
KEOD 2018 - 10th International Conference on Knowledge Engineering and Ontology Development
78
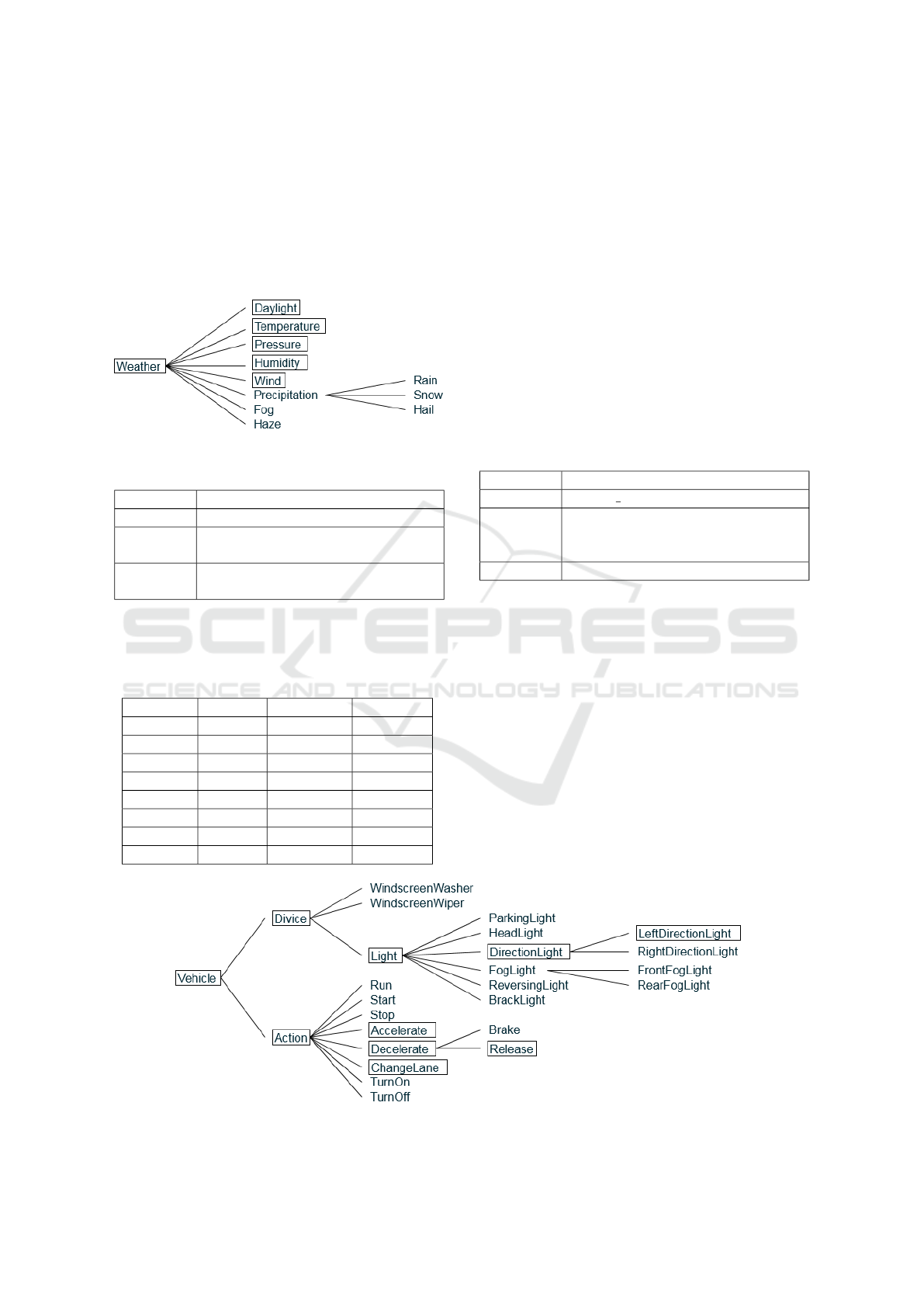
on the autonomous vehicle, for exemple the concepts
Daylight, Precipitation, Fog and Haze. As the pro-
perties of the concept Daylight presented in Table 2,
the visibility of the autonomous vehicle is reflected
by the distance at which an infrastructure or a vehicle
can be clearly discerned. Some concepts have their
properties to show the physical quantity, such as the
concepts Temperature, Pressure and Humidity.
Figure 7: Concepts of Weather ontology.
Table 2: Definition of the concept Daylight
Concept Daylight
Entity daylight
Definition The combination of all direct and in-
direct sunlight during the daytime.
Properties Direction (from 0 to 360
◦
, 180
◦
re-
fers to south light), Visibility (m)
We have defined twelve (12) concepts for the we-
ather ontology (Figure 7). The framed concepts are
those that can be used for the running example.
Table 3: Properties of concept Vehicle.
ID Ego V c
1
V c
2
Role EgoCar TargetCar OtherCar
Category Class1 Class1 Class1
Height H
e
H
1
H
2
Width W
e
W
1
W
2
Length L
e
L
1
L
2
Weight m
e
m
1
m
2
Color Blue Green Red
Speed v
e
v
1
v
2
Vehicle Ontology: This ontology describes the per-
formance of a vehicle with nine (9) properties. Table
3 shows the properties of three vehicles in the ini-
tial scene of running example. All roles (EgoCar,
TargetCar and OtherCar) of vehicles can be repre-
sented. There are five classes of vehicle category pro-
vided in (Minist
`
ere de l’
´
equipement, 2000), where
Class1 refers to light vehicles whose hight is less than
or equal to 2m and GVWR (Gross Vehicle Weight
Rating) is less than or equal to 3,5t. The concept
Vehicle consists of two main sub-entities: Device
and Action. Device refers to the devices actionable
during the performance of the vehicle, such as the
WindscreenWiper and the Light. Action refers to the
control actions that could be made by pilot, such as
action ChangeLane defined in Table 4.
Table 4: Definition of the concept ChangeLane.
Concept ChangeLane
Entity change lane
Definition An action indicating a lane change to
enter or exit the highway or overta-
king another vehicle.
Properties Direction (Left/right)
Figure 6 shows the twenty-six (26) concepts we
have defined for vehicle ontology. The framed con-
cepts are those that can be used for the running exam-
ple.
4.2 The Relationships and Rules
In order to represent the complex and intricate relati-
onships between the entities, we consider three kinds
of relationships (Figure 8): the relationships between
the highway entities, the relationships between the
vehicle entities, and the relationships between the en-
tities of highway and vehicle. Moreover, the traffic
regulation and the interactions between the concepts
are written as rules to simulate the environment of au-
tonomous vehicle. We use first-order logic to repre-
Figure 6: Concepts of vehicle ontology.
An Ontology-based Approach to Generate the Advanced Driver Assistance Use Cases of Highway Traffic
79

sent these relationships and rules. Note that we use
the ID of concepts as the variables in the relationship
formulas.
Figure 8: Relationships (solid lines) and effects (dashed li-
nes).
a. Relationships between Highway Entities
There are three types of relationships between the en-
tities of the highway ontology:
– inheritance relationship (unary). For exam-
ple the relationship isShoulder(RightSo f tShoulder
1
)
means that RightSo f tShoulder
1
is a sub-entity of
Shoulder.
– composition relationship (binary). For example
hasCarriageway(Roadway
1
,RightSo f tShoulder
1
)
means that Roadway
1
is composed of
RightSo f tShoulder
1
.
– position relationship (binary) which con-
sists of the longitudinal position, the trans-
verse position and the vertical position. For
example the vertical position relationship
hasPrioritySign(RightSo f tShoulder
1
,PrioritySign
1
)
means that PrioritySign
1
is located on
RightSo f tShoulder
1
.
Combining the three previous types of re-
lationships, we can infer more complex relati-
onships. For example, combining relationships
isShoulder, hasCarriageway, hasPrioritySign with
isPrioritySign and isRoadway relationships, we can
infer the following one (Formula (1)).
isRoadway(Roadway
1
)
^
isShoulder(RightSo f tShoulder
1
)
^
isPrioritySign(PrioritySign
1
)
^
hasCarriageway(Roadway
1
,RightSo f tShoulder
1
)
^
hasPrioritySign(RightSo f tShoulder
1
,PrioritySign
1
)
→ hasPrioritySign(Roadway
1
,PrioritySign
1
)
(1)
Where
V
is the conjunction logical connector and
→ is the implication logical connector.
Table 5 lists out all relationships bet-
ween the entities of highway for running
example. We note that the relationships
hasRightHardShoulder(Median
1
,Le f thardshoulder
1
)
means that there is Le f thardshoulder
1
at the right
hand of Median
1
. Le f thardshoulder
1
is the ID of
entity le f t hard shoulder. This entity is different
from right hard shoulder which refers to the hard
shoulder at the edges of the highway.
Table 5: Relationships between highway entities for run-
ning example.
Type Relationship
Inheritance isHighway, isInterchange,
isRamp, isShoulder,
isEquipment, isSymbol,
isMarking, isSpeci f icMarking,
isSign, isPrioritySign
Composition hasSegment, hasInterchange,
hasRoadway, hasMedian,
hasCarriageway, hasShoulder,
hasLane, hasMainLane,
hasAuxilaryLane,
hasAccelerationSection,
hasTaper
Position Longitudinal position:
connecteToSegment,
connecteToAccelerationSection,
connecteToTaper
Transverse position:
hasLe f tMedian,
hasLe f tShoulder,
hasRightShoulder,
hasLe f tLine, hasRightLine,
hasLe f tChevronMarking,
hasRightChevronMarking,
hasLe f tSo f tShoulder,
hasRightSo f tShoulder
Vertical position:
hasSignCedezlepassage,
hasDe f lectionArrowMarking
b. Relationships between Vehicle Entities
There are eight (8) binary relationships bet-
ween EgoCar and the other cars (TargetCar and
OtherCar). We consider that the EgoCar position is
the origin point as shown in Figure 9.
The EgoCar can have a TargetCar in front, which
is conceptualised using relationship hasAheadVehicle
and each OtherCar around it is considered using the
KEOD 2018 - 10th International Conference on Knowledge Engineering and Ontology Development
80
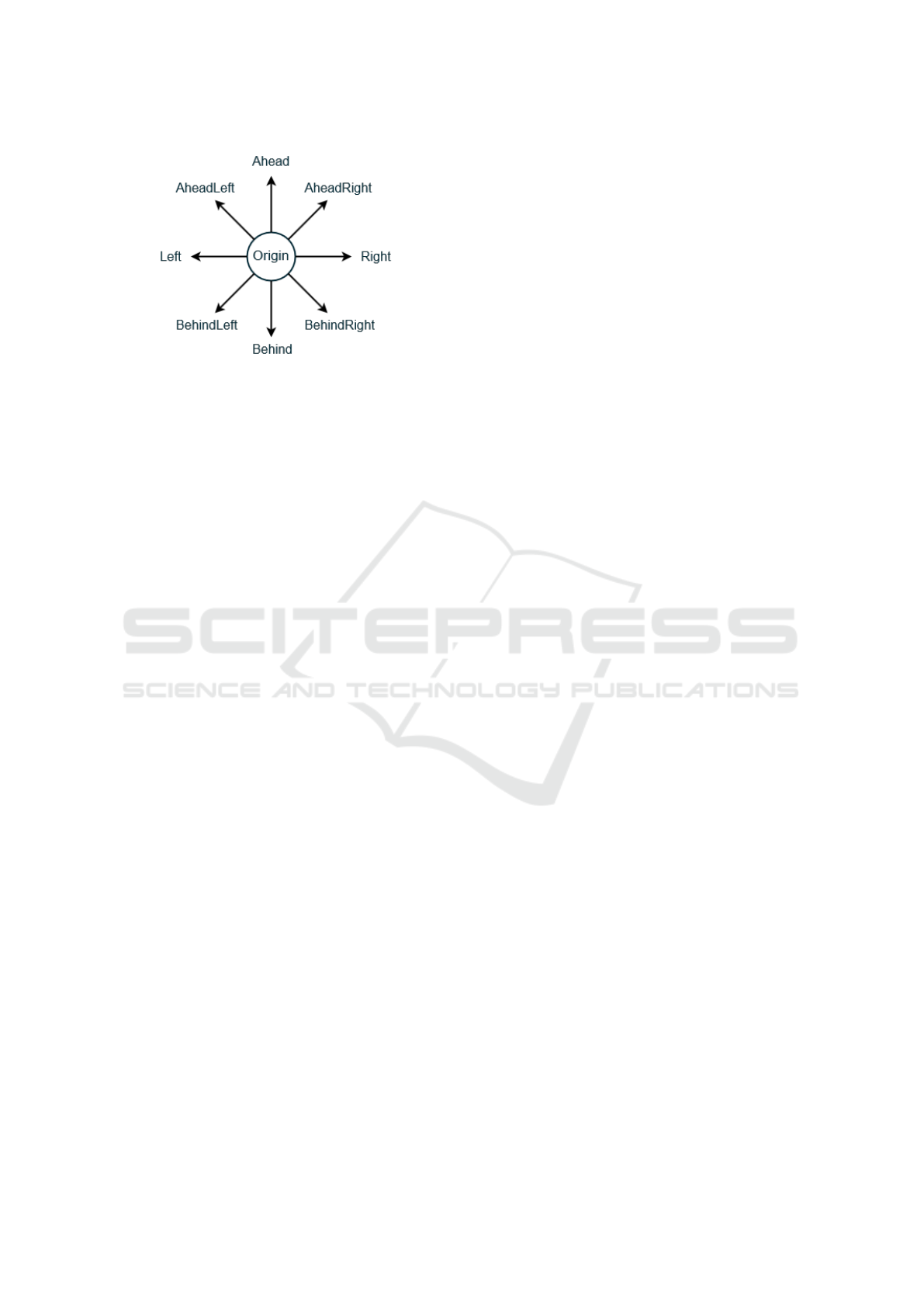
Figure 9: Vehicles around the EgoCar.
following relationships:
- hasAheadLeftVehicle
- hasLeftVehicle
- hasBehindLeftVehicle
- hasBehindVehicle
- hasBehindRightVehicle
- hasRightVehicle
- hasAheadRightVehicle
In the first scene of our running example, the rela-
tionship between EgoCar and TargetCar can be des-
cribed using Formula (2), and the relationship bet-
ween EgoCar and OtherCar can be described using
Formula (3).
hasAheadVehicle(Ego, V c
1
) (2)
hasRightVehicle(Ego, V c
2
) (3)
Where Ego, V c
1
and V c
2
are the ID of EgoCar,
TargetCar and OtherCar, perspectively.
c. Relationships between Highway and Vehicle
Entities
In this study, we consider that all vehicles obey the
traffic rules. Therefore, the binary relationships bet-
ween vehicle and highway entities are the followings:
- enters
- leaves
- on
The formulas of these relationships have two va-
riables, the ID of concept Vehicle and the ID of
a concept which can be any of Lane, Shoulder or
Sa f etyArea. For example, in the first scene, the rela-
tionships between the entities of vehicle and highway
can be described as:
on(Ego, Lane
3
) (4)
on(V c
1
, Lane
3
) (5)
on(V c
2
, EnLane
1
) (6)
Where Lane
3
is the ID of Lane and EnLane
1
is
the ID of EntranceLane.
We consider the traffic regulation as rules to define
the features and significance of highway infrastruc-
ture, and regulate the behavior of vehicles. In the run-
ning example, the speed on Carriageway
1
, which is
the ID of Carriageway, is limited to 130 km/h. This
rule limits the speed of EgoCar and this can be speci-
fied as:
Speed(Ego) ≤ SpeedLimit(Carriageway
1
) (7)
Where Speed is a function to generate the speed
of vehicles and SpeedLimit is a function to show the
speed limit on a portion of highway. Note that v
e
≤
130km/h can be derived from Formula (7).
The weather phenomena can have an effect on the
highway, the vehicle and on itself (Figure 8). These
effects are also written as rules. For example, the
Snow phenomenon can only appear at very low tem-
peratures, and it can make the vehicle make action
TurnOn the FogLight to increase the visibility of Ego
for the other cars. And the Snow phenomenon can af-
fect the visibility of the Equipment of highway. In
this work, we assign values directly to the function
Visibility because there is not enough available data
to build the model which simulates the effects of we-
ather phenomena.
5 USE CASES GENERATION
Simon Ulbrich et al. (Ulbrich et al., 2015) present
a definition of interfaces for the design and test of
functional modules of an automated vehicle. Based
on that, we define the scene as a snapshot of the vehi-
cle environment including the static and mobile ele-
ments, and the relationships among those elements.
A scenario describes the temporal development bet-
ween several scenes in a sequence of scenes (Figure
10). These scenes are developped by the actions made
by EgoCar or the events occuring due to the actions
made by other vehicles, and this from the point of
view of EgoCar. A use case describes one or several
scenarios applied to some ranges and behaviors to si-
mulate the ADAS.
In order to generate use cases based on the ontolo-
gies we have defined, we define a three-layers appro-
ach. This approach follows a bottom-up hierarchy of
an ontology with three layers for semantic expression
of dynamic events in dynamic traffic scenes (Yun and
Kai, 2015). Our approach consists of the following
three layers:
An Ontology-based Approach to Generate the Advanced Driver Assistance Use Cases of Highway Traffic
81
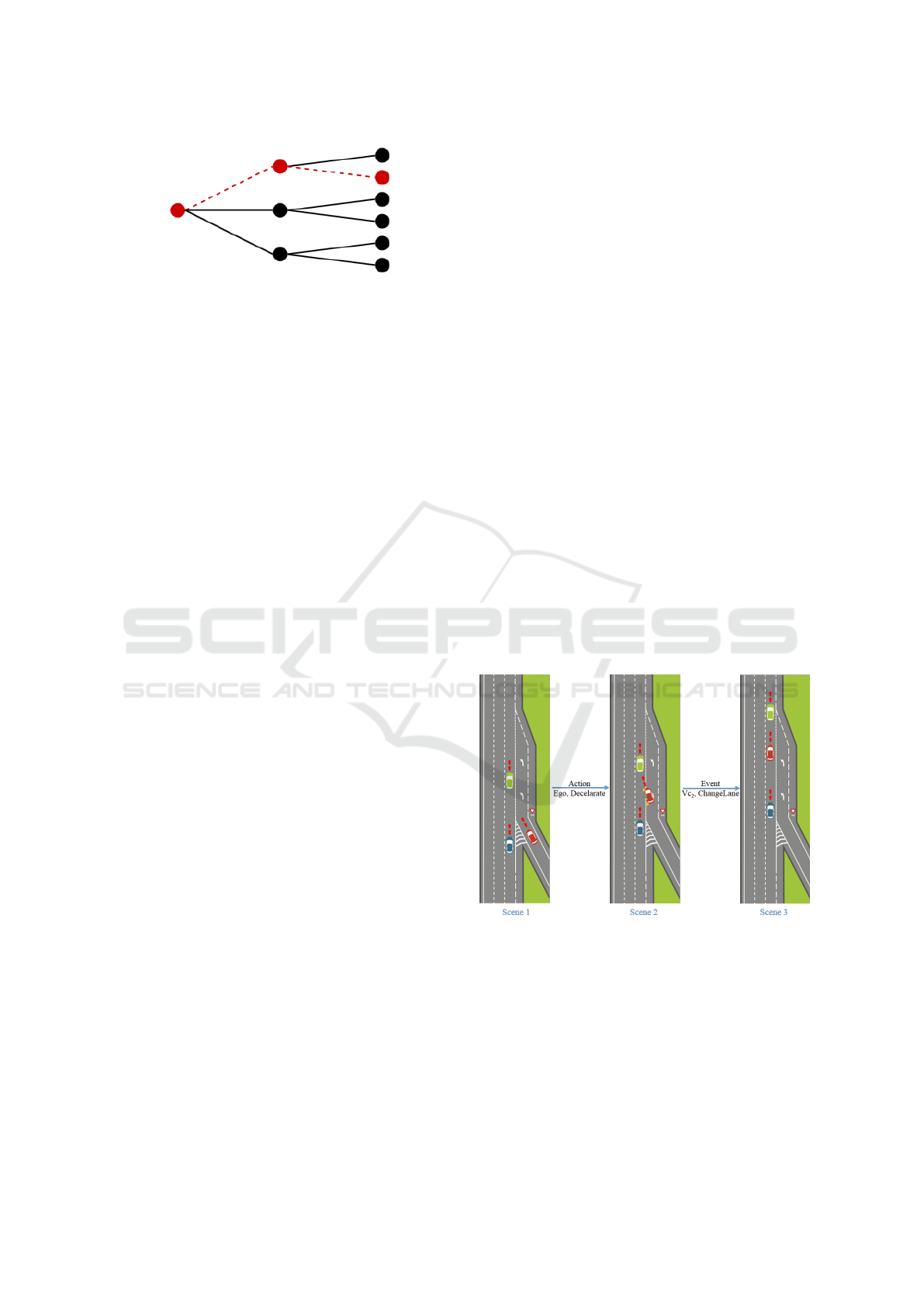
Figure 10: A scenario (red dashed line) made by acti-
ons/events (edges) and scenes (nodes).
Basic Layer: The basic layer includes the static
concepts and the mobile concepts of the highway, the
weather and the vehicle ontologies. The entities that
do not change position are considered as static. The
infrastructure and the weather are considered as the
static concepts, while EgoCar and the traffic are con-
sidered as the mobile ones. Some of the static con-
cepts, such as the lighting and the weather, can change
state but not their position. We call them dynamic
concepts, in order to distinguish them from the mo-
bile ones. All the concepts that appear in the running
example are framed in Figure 5, Figure 6 and Figure
7.
Interaction Layer: The static concepts and the mo-
bile concepts of the basic layer are defined in terms
of entity, sub-entities and properties. The interaction
layer describes the interaction relationships, between
on the one hand the static entities, and on the other
hand the mobile ones. Moreover this layer describes
the relationships between static and mobile entities.
With the first order logic, we describe the relations-
hips between the entities using formulas such as those
used for the running example in Subsection 4.2. Then
the scene generated is described as the logic formulas
with the concepts in the basic layer and the relations-
hips in the interaction layer. For example, in the first
scene of the running example, the vehicles part can be
described as follows:
on(Ego, Lane
3
) (8)
on(V c
1
, Lane
3
) (9)
on(V c
2
, EnLane
1
) (10)
hasAheadVehicle(Ego, V c
1
) (11)
Distance(Ego, V c
1
) = d
1
(12)
hasRightVehicle(Ego, V c
2
) (13)
Distance(Ego, V c
2
) = d
2
(14)
Generation Layer: The task of the generation layer
is to build use cases which include one or several
scenarios. In the beginning of this section, the sce-
nario is defined as a sequence of scenes, associated
with the goals, values and actions of EgoCar, the
values and events from the other actors, and the va-
lues of the properties defined in the static concepts.
In the running example, the objective is the insertion
of V c
2
(OtherCar) by the right entrance lane of the
highway. The actions which can possibly be made by
Ego (EgoCar) are Decelerate, Accelerate and Run.
The actions possibly made by other vehicles, which
are considered as events from Ego’s point of view,
are Decelerate, Accelerate, Run, ChangeLane and
TurnOn (Figure 6).
With the same initial scene, it is evident that dif-
ferent actions or events lead to different scenes, and
make different scenarios. In the running example, we
describe two of several possibilities. The scenario in
the first case (Figure 11) can be generated as:
Scene1 = {Concepts} ∨ {Relationships} (15)
Scene2 = (Scene1, Decelerate) (16)
Scene3 = (Scene2, Event
1
) (17)
Where
Event
1
≡ (V c
2
, ChangeLane(Le f t)) (18)
In Scene 2, Vc
2
is on EnLane
1
which is presented
in formula (6) and the relationship between EnLane
1
and Lane
3
is hasLe f tLane(EnLane
1
, Lane
3
). The-
refore, Event
1
means that V c
2
makes action
ChangeLane from Enlane
1
to Lane
3
.
Figure 11: Scenario “Insertion before Ego”.
One scenario is one possibility of a use case (Fi-
gure 10). A use case includes one or several scenarios.
The use case of autonomous vehicle is the simulation
of the driving environment, the traffic and the pilot.
As the role of the pilot, system ADAS limits to a set
of decisions that will be made by EgoCar. For ex-
ample, the existence of a target vehicle is necessary
for the EgoCar to activate the system TJC. Therefore,
the EgoCar cannot make the action ChangeLane to
KEOD 2018 - 10th International Conference on Knowledge Engineering and Ontology Development
82

the left lane because there is no target vehicle. These
ranges and behaviors are presented as rules to make
sure that only reasonable use cases will be generated.
6 CONCLUSIONS
In this article, we propose an ontology-based appro-
ach for the generation of use cases with a hierarchy
in three layers: basic layer, interaction layer and ge-
neration layer. We built three ontologies for the con-
ceptualization and characterization of the components
of use cases: a highway ontology and a weather on-
tology to specify the environment in which evolves
the autonomous vehicle, and a vehicle ontology which
consists of the vehicle devices and the control actions.
Relationships and rules, such as traffic regulation, are
expressed using a first-order logic.
An autonomous vehicle is a safety-critical system
for which all behaviors must be predictable. The-
refore, the generated use cases need to be modelled
with a semantically explicit formal language to im-
prove their reliability and robustness. In the future,
we are interested in the formalisation of these use ca-
ses considering also the time factor.
ACKNOWLEDGEMENTS
This research work has been carried out in the fra-
mework of IRT SystemX, Paris-Saclay, France, and
therefore granted with public funds within the scope
of the French Program “Investissements d’Avenir”.
REFERENCES
Armand, A., Filliat, D., and Guzman, J. I. (2014).
Ontology-based context awareness for driving assis-
tance systems. In 2014 IEEE Intelligent Vehicles Sym-
posium Proceedings, Dearborn, MI, USA, June 8-11,
2014, pages 227–233.
Bagschik, G., Menzel, T., and Maurer, M. (2017). Ontology
based scene creation for the development of automa-
ted vehicles. CoRR Computing Research Repository,
abs/1704.01006.
Bartosiak, D. (2018). Nissan and nasa extend partnership
on autonomous tech. http://www.thedrive.com/
sheetmetal/17607/nissan-and-nasa-extend-
partnership-on-autonomous-tech.
BBC (2018). Tesla in fatal california crash was on au-
topilot. http://www.bbc.com/news/world-us-canada-
43604440.
Caughill, P. (2017). Dubai jump starts autonomous taxi
service with 50 tesla vehicles. https://futurism.com/
dubai-jump-starts-autonomous-taxi-service-with-50-
tesla-vehicles/.
Gain, B. (2017). Waymo patent shows plans to replace
steering wheel & pedals with push buttons. https://
driverless.wonderhowto.com/news/waymo-patent-
shows-plans-replace-steering-wheel-pedals-with-
push-buttons-0179498/.
H
¨
ulsen, M., Z
¨
ollner, J. M., and Weiss, C. (2011). Traffic in-
tersection situation description ontology for advanced
driver assistance. In IEEE Intelligent Vehicles Sym-
posium (IV), 2011, Baden-Baden, Germany, June 5-9,
2011, pages 993–999.
Hummel, B., Thiemann, W., and Lulcheva, I. (2008). Scene
understanding of urban road intersections with des-
cription logic. In Logic and Probability for Scene In-
terpretation, 24.02. - 29.02.2008.
Krok, A. (2018). Audi expands traffic light information
v2i to washington. https://www.cnet.com/roadshow/
news/audi-v2i-traffic-light-information-washington-
dc/.
Minist
`
ere de l’
´
ecologie, E. d. r. e. d. r. (1988). Arr
ˆ
et
´
e du 16
fvrier 1988 relatif l’approbation de modifications de
l’instruction interministrielle sur la signalisation rou-
tiere, instruction interministerielle sur la signalisation
routiere. Journal officiel du 12 mars 1988.
Minist
`
ere de l’
´
equipement, des Transports, d. L. d. T. e. d.
l. M. (2000). Dcret n 2000-1355 du 30/12/2000 paru
au jorf n 0303 du 31/12/2000. JORF n0303 du 31
dcembre 2000.
Morignot, P. and Nashashibi, F. (2012). An ontology-based
approach to relax traffic regulation for autonomous
vehicle assistance. CoRR Computing Research Repo-
sitory, abs/1212.0768.
Pollard, E., Morignot, P., and Nashashibi, F. (2013). An
ontology-based model to determine the automation le-
vel of an automated vehicle for co-driving. In Procee-
dings of the 16th International Conference on Infor-
mation Fusion, FUSION 2013, Istanbul, Turkey, July
9-12, 2013, pages 596–603.
protege.stanford.edu (2012). Protg. http://protege.
stanford.edu/.
Tesla (2018). Model x. https://www.tesla.com/modelx.
Ulbrich, S., Menzel, T., Reschka, A., Schuldt, F., and Mau-
rer, M. (2015). Defining and substantiating the terms
scene, situation, and scenario for automated driving.
In IEEE 18th International Conference on Intelligent
Transportation Systems, ITSC 2015, Gran Canaria,
Spain, September 15-18, 2015, pages 982–988.
Uschold, M. and Gruninger, M. (1996). Gruninger, m.: On-
tologies: Principles, methods and applications. know-
ledge eng. rev. 11(2), 93-155. 11.
Yun, Y. and Kai, C. (2015). A method for semantic repre-
sentation of dynamic events in traffic scenes. Infor-
mation and control, 44(1): 83-90. http://ic.sia.cn/CN/
10.13976/j.cnki.xk.2015.0083.
Zhao, L., Ichise, R., Mita, S., and Sasaki, Y. (2015). Core
ontologies for safe autonomous driving. In Procee-
dings of the ISWC 2015 Posters & Demonstrations
Track co-located with the 14th International Semantic
Web Conference (ISWC-2015), Bethlehem, PA, USA,
October 11, 2015.
An Ontology-based Approach to Generate the Advanced Driver Assistance Use Cases of Highway Traffic
83
