
Safe Driving Mechanism: Detection, Recognition and Avoidance of
Road Obstacles
Andrea Ortalda
1,3
, Abdallah Moujahid
2,3
, Manolo Dulva Hina
3
,
Assia Soukane
3
and Amar Ramdane-Cherif
4
1
Politecnico di Torino, 24 Corso Duca degli Abruzzi,10129 Turin, Italy
2
Université Internationale de Casablanca, Casablanca, Morocco
3
ECE Paris School of Engineering, 37 quai de Grenelle, 75015 Paris, France
4
Université de Versailles St-Quentin-en-Yvelines, 10-12 avenue de l’Europe, 78140 Velizy, France
Keywords: Ontology, Formal Specification, Machine Learning, Safe Driving, Smart Vehicle, Cognitive Informatics.
Abstract: In an intelligent vehicle (autonomous or semi-autonomous), detection and recognition of road obstacle is very
important for it is the failure to recognize an obstacle on time which is the primary reason for road vehicular
accidents that very often leads to human fatalities. In the intelligent vehicle of the future, safe driving is a
primary consideration. This is accomplished by integrating features what will assist drivers in times of needs,
one of which is avoidance of obstacle. In this paper, our knowledge engineering is focused on the detection,
classification and avoidance of road obstacles. Ontology and formal specifications are used to describe such
mechanism. Different supervised learning algorithms are used to recognize and classify obstacles. The
avoidance of obstacles is implemented using reinforcement learning. This work is a contribution to the
ongoing research in safe driving, and a specific application of the use of machine learning to prevent road
accidents.
1 INTRODUCTION
The statistics on global traffic accidents
(World_Health_Organization 2017) are disturbing:
Every year, about 1.24 million people die each
year in road traffic accidents;
Road traffic injury is the leading cause of death
on young people, aged 15–29 years;
Half of those dying on the world’s roads are
“vulnerable road users”, namely the
pedestrians, cyclists and motorcyclists;
If no remedy is employed, road traffic
accidents are predicted to result in the deaths of
around 1.9 million people annually by 2020.
Here lies the importance of researches on
intelligent transportation intended to detect,
recognize and avoid road obstacles, such as ours. An
intelligent transportation (Kannan et al. 2010)
(Fernandez et al. 2016) denotes advanced application
embodying intelligence to provide innovative
services related to road obstacles, enabling various
users to be better informed and makes safer, more
coordinated, and smarter decisions.
Our vision of an innovative vehicle (Hina et al.
2017) is shown in Figure 1. Within this vehicle is an
intelligent architecture with three main components:
(1) Embedded System, (2) Intelligent System, and (3)
Network and Real-time System.
Figure 1: Smart services for an intelligent vehicle.
96
Ortalda, A., Moujahid, A., Hina, M., Soukane, A. and Ramdane-Cherif, A.
Safe Driving Mechanism: Detection, Recognition and Avoidance of Road Obstacles.
DOI: 10.5220/0006935400960107
In Proceedings of the 10th International Joint Conference on Knowledge Discovery, Knowledge Engineering and Knowledge Management (IC3K 2018) - Volume 2: KEOD, pages 96-107
ISBN: 978-989-758-330-8
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
The intelligent system component, for its part, has
a built-in intelligence that enables the vehicle to
detect, classify and avoid an obstacle. Embedded
Machine learning (Ithape 2017, Saxena 2017)
intelligence makes it appropriate to decide on behalf
of the driver and other passengers. In this paper, we
explain machine learning and types of machine
learning in details. We intend to use machine learning
in the detection, classification and avoidance of
obstacles. To realize this, we developed a driving
setting in which the driving environment is described.
In such environment, we distinguished the road
objects, the near objects and the obstacles. We then
make use of supervise learning to identify and
classify these obstacles. The work is completed by
designing reinforcement learning mechanism to
avoid a generic obstacle. The case is applicable to all
other types of obstacles.
2 RELATED WORKS
Many researches have been made on obstacle
detection, classification and avoidance as this type of
system helps insuring road safety and therefore has
become one of the key enablers in Advanced Driver
Assistance System (ADAS). For example, the Euro
New Car Assessment Program requires providing
vehicles with a Front Collision Warning function
(Pyo et al. 2016). Several carmakers started
implementing obstacle detection and avoidance based
systems such as Front Assist, Crash avoidance and
Automatic Emergency Braking (AEB) in their middle
and high range cars (Coelingh et al. 2010,
ResearchNews 2013). Image processing techniques
and computer vision models are extensively used in
obstacle detection and classification researches
(Bevilacqua and Vaccari 2007, Zeng et al. 2008)
(Wolcott and Eustice 2016). This is justified by the
use of different types of cameras such as stereo and
monocular ones, which are less expensive than high-
density laser scanners like LiDAR (Levi et al. 2015).
Other research works, such as (Linzmeier et al. 2005,
Bertozzi et al. 2008, García et al. 2013, Shinzato et al.
2014, Wang et al. 2014) use combined information
obtained from several lasers and imaging sensors to
detect road obstacles namely vehicles and
pedestrians. The main reason being the
complementarity between these different sensors and
the fact that the imaging sensors do not provide
enough information on the distance between the
vehicle and the obstacles of the road, which is
essential for obstacle avoidance systems.
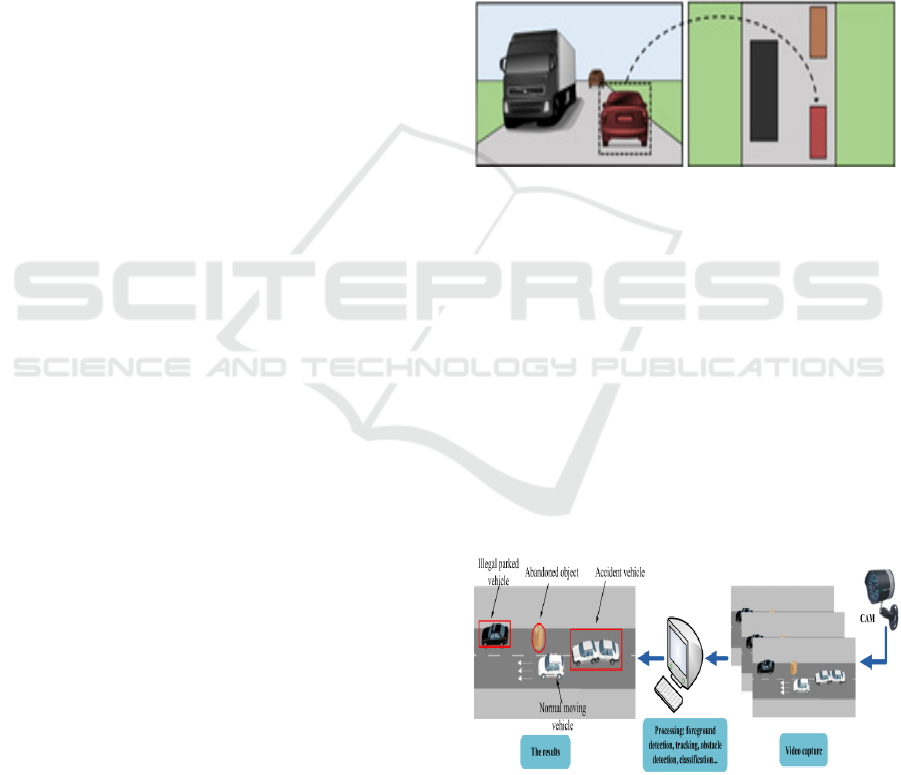
In (Bazilinskyy et al. 2018), the authors proposed
a system based on a deep network for road scene
visualization (Figure 2). The system generates a
bird’s eye map showing the surrounding vehicles that
are visible to the dashboard camera. To train the
model, authors used a video game called GTAV to
generate a massive dataset of more than one million
images. Each image has two variants, one
corresponding to vehicle dashboard view and the
second to bird’s eye view. Other information like
yaw, location and distance are also collected. Authors
claims the usefulness of the system to help the driver
in making a better decision being more aware of the
driving environment.
Figure 2: Input and output of Bazilinskyy, P. et al. system.
The authors in (Lan et al. 2016) worked on a real-
time approach to detect and recognize road obstacles.
A special focus has been made on three types of
obstacles, namely abandoned objects, illegally parked
vehicles and accident vehicles (Figure 3). The system
follows three main consequent steps. It starts by
removing the objects outside the road using a Flushed
Region of Interest (FROI) algorithm. It then uses a
Histogram Orientation Gradient (HOG) descriptor to
detect road obstacles based on the speed of tracked
objects and finally applying a Support Vector
Machine (SVM) algorithm to classify the ROI and to
separate abandoned objects from vehicles (both
accident and illegally parked vehicles).
Figure 3: Overview of detection system.
The two types of vehicles are then distinguished
using a special algorithm for accident vehicles
identification. The authors contend that the proposed
system achieved a detection rate of 96%.
Safe Driving Mechanism: Detection, Recognition and Avoidance of Road Obstacles
97

Most of collision avoidance systems start by
detecting and classifying the obstacle that may cause
the collision before calculating the time to collision
(TTC) which indicates the remaining time two
consecutive vehicles are to collide. In the event of
TTC, the system reacts either by alerting or warning
the driver or even by acting on the vehicle causing
braking (Rummelhard et al. 2016). In 2011, Volvo
has commercialized its “Volvo S60” car with
"Collision Warning with Auto Brake and Cyclist and
Pedestrian Detection" feature to assist the driver in
case of a risk of collision with a vehicle, cyclist or
pedestrian (Coelingh, Eidehall et al. 2010). Other
auto manufacturers such as Ford, Honda, and Nissan
Mercedes-Benz have equipped their vehicles with
Collision Avoidance Systems (ResearchNews 2013).
The authors of (Shinzato, Wolf et al. 2014)
proposed an obstacle detection method that processes
a data from a LIDAR sensor combined with single
camera-generated images. The obstacles are then
classified using the LIDAR point’s height
information. In (Lee and Yeo 2016), the authors
proposed a system for real time Collision Warning
based on a Multi-Layer Perceptron Neural Network
(MLPNN). The input layer was composed of five
input neurons: the distance between preceding and
following vehicle, speed and acceleration of the
following vehicle, speed and deceleration of the
preceding vehicle. The final output used a threshold
discriminator of 0.5 to come out with a value of zero
or one indicating whether a rear-end collision
warning should be displayed.
In (Iqbal et al. 2015), the authors worked on a
Dynamic Bayesian Network (DBN) method to train a
model using information gathered by IMU sensor and
a camera. The system was designed to provide two
types of support: warning on nearby vehicles and
brake alert for potential collision with the calculation
of the speed and acceleration of the vehicle. The test
showed a convenient performance that can be
improved by adding other sensors like radar and
LIDAR. Most features here have to be integrated in
smart vehicle’s intelligent component.
3 THE DRIVING ENVIRONMENT
The driving environment is a set of all the elements
describing the driver, the vehicle and all entities,
animate or inanimate, present during the conduct of a
driving activity. In this section, we will analyse the
features that makes an object found within the
environment an obstacle.
3.1 Environment Representation
Here, we identify the elements that are present during
the conduct of a driving activity. We will describe
these elements in a mathematical notion. The sets of
elements present in the environment during a driving
activity are: (i) the road object collection (R); (ii) the
nearby object collection (C); and (iii) the obstacle
object collection (O)
Let R be the set of all the road objects present in
the environment E. Let C be the set of nearby road
objects and O the set of the obstacles. Then R is an
element of E, C is a subset of R, and O is a subset of
C. Mathematically,
R = {r
1
, r
2
, …, r
n
}, R ⊂ E (1)
C = {c
1
, c
2
, …, c
n
}, C ⊆ R (2)
O = {o
1
, o
2
, …, o
n
}, O ⊆ C (3)
Let
e be an environment object in our driving
simulation platform, programmed using Unity 3D
(Game_Engine 2016). Every
e related to the driving
environment has a tag
t, a notation used for
identification purposes. For all
e in E, if an element e
has a tag of “
RoadObject”, then such e (denoted e
1
) is
a road object
r
1
. Mathematically, ∀e ϵ E | ∃e
i
• t =
“RoadObject” e
i
= r
i
∧ R ≠ ∅. Figure 4 shows the
specimen environment E and all the elements
r ϵ R
(all elements that are found on the road) are
highlighted.
Figure 4: The specimen environment E and the entire road
objects r’s therein (R ⊂ E).
KEOD 2018 - 10th International Conference on Knowledge Engineering and Ontology Development
98
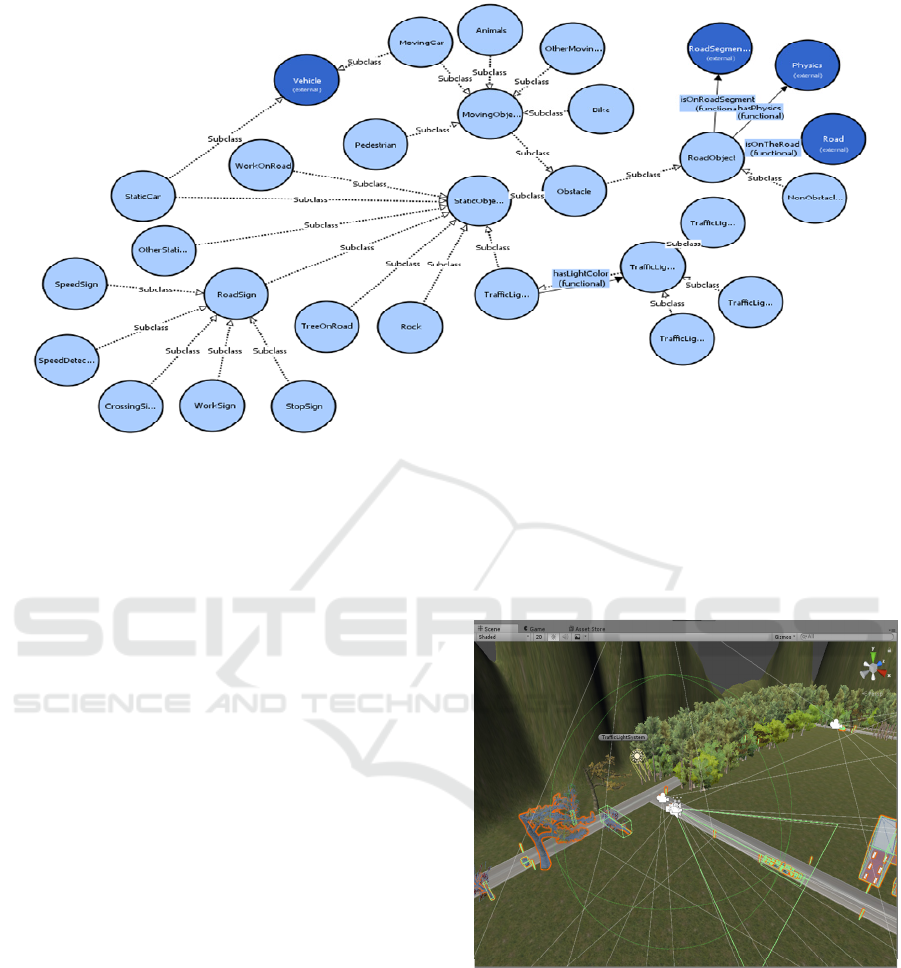
Figure 5: The ontological representation of road object collection R.
Figure 5 shows the ontological representation of
an element
r ∈ R. The subclasses describe the
different types of r and every subclass of Thing can
have one or more individuals. The arrows
“
hasSubclass” and “hasIndividual” show how this is
done in Protégé (Protégé 2016).
3.2 The Nearby Road Object Collection
The nearby road objects are those elements that are
within the vicinity of the referenced vehicle. See
Figure 6. They are parts of the road objects collection.
By vicinity, we mean an element is located within the
referenced radius (example: 50 meters) of a
referenced vehicle. Let
m be the radius of the
referenced sphere (as it is the case in Unity 3D), and
d as the distance between our referenced vehicle and
a road object. If the distance d of the road object is
less than m then such road object is considered a
nearby road object
c. Mathematically, ∀r ϵ R | ∃r
i
• d
< m r
i
= c
i
∧ C ≠ ∅.
Figure 6 shows our specimen E with all elements
c ∈ C highlighted. Take note that a radius from the
referenced vehicle is shown. It is to be noted that this
one is just one of the possible
c to consider. Nearby
road objects may be in front, at the back, on the left
or on the right side of the referenced vehicles. Some
of the nearby road objects may be obstacles while
some may be not. Ontology creation is therefore
important because it allows us to have a good vision
of the closest road object that may be considered as
road obstacles.
Figure 7 shows all elements
c ∈ C. As shown, the
ontology is much smaller than the previous one, given
that we only consider objects that are present in the
specified radius of a sphere with our vehicle as the
point of reference, with radius =
m.
Figure 6: The nearby road objects from the referenced
vehicle’s perspective.
3.3 The Obstacle Object Collection
The nearby road objects are obstacles if they are in
front of the vehicle (located in the same lane), the
distance between it and the referenced vehicle is near,
and the time to collision is near.
Let
v = the current speed of our referenced vehicle,
d = the distance between the vehicle and the road
object r, t = the time to collision, m = radius of the
Safe Driving Mechanism: Detection, Recognition and Avoidance of Road Obstacles
99

Figure 7: The ontological representation of nearby road object collection C.
sensor sphere, l = describes if the vehicle and the
object
r are on the same lane and p = the direction of
the vehicle. For a nearby object
c
i
∈ C located within
the vicinity of the referenced vehicle, and given that
the speed of the vehicle divided by the distance
between the vehicle and the nearby object is less than
the time to collision, and that both the vehicle and the
nearby object are on the same lane, then object
c
i
is
an obstacle. Mathematically, ∀
c ϵ C | ∃c
i
• d < m ∧ v/d
< t ∧ l = 1 ∧
d > 0 c
i
= o
i
∧ O ≠ ∅. Note that the
parameter
p is used in the computation of l.
Given that the simulation platform is in 3D
coordinate system, the orientation is necessary in
order to determine if vehicle
s and nearby object c are
on the same lane. Let
dcr be the distance from the
center of the road. Then:
If
p = North ∨ p = South dcr is taken on the
x plane, else dcr is taken on the z plane.
Let dcr
s
be the distance the vehicular system to the
center of the road, and dcr
c
be the distance of nearby
object to the center of the road, then:
l =1, if (dcr
s
> 0 ∧ dcr
c
> 0) ∨ (dcr
s
< 0 ∧ dcr
c
<
0)
l = -1, if (dcr
s
> 0 ∧ dcr
c
< 0) ∨ (dcr
s
< 0 ∧ dcr
c
> 0)
Figure 8 shows a sample road obstacle located in
the same lane as the vehicle. Here, the ontology
representation details are important. It is essential that
all conditions for qualifying an object as an obstacle
be verified.
Figure 8: A sample obstacle in the simulation platform.
Figure 9 shows the properties of every obstacle o
∈ O. Here, the ontology is presented in details for
obstacle roadwork
o
1
∈ O. The legend below shows
the obstacle characteristics, such as speed or size.
In this phase, the road obstacle is already detected.
The next phase should be the identification of the
obstacle. An obstacle may be another vehicle (static
or moving), a pedestrian, a roadwork sign, a traffic
light, etc. In general, when an obstacle is detected, the
referenced vehicle should stop or slow down and try
to avoid such obstacle. The manner to avoid is
different, depending on the type of the obstacle. For
example, we avoid pedestrian differently from a rock
stuck on the road. Machine learning (Mitchell 1997,
Louridas and Ebert 2016) would be used to identify
an obstacle.
KEOD 2018 - 10th International Conference on Knowledge Engineering and Ontology Development
100

Figure 9: Ontological representation of a sample obstacle (work on the road).
4 MACHINE LEARNING FOR
OBSTACLE CLASSIFICATION
4.1 Basics of Machine Learning
Supervised learning and unsupervised learning are
the two main learning types in which we can divide
the machine-learning world (Tchankue et al. 2013),
while reinforcement learning and deep learning can
be seen as special application of supervised and
unsupervised learnings. Consider a normal
x-y
function, given a set of input x, we define y as the
corresponding output value for a relation f between
x
and y. The differences between machine learning
techniques may be explained using the basic notion
of mathematics given below:
In supervised learning, x and y are known and
the goal is to learn a model that approximate
f.
In unsupervised learning, only
x is given and
the goal is to find
f between the set of x.
Supervised learning is used for model
approximation and prediction while unsupervised is
used for clustering and classification (Tchankue,
Wesson et al. 2013). Reinforcement learning is a
particular case of supervised learning; it differs from
the standard case not due to the absence of
y but in the
presence of delayed-reward
r that allows it to
determine f in order to get the right y. See Table 1.
Deep learning is a supervised or unsupervised
work based on learning data representation. It uses an
architecture based on multiple-layer structure for the
data (Lv et al. 2015), using it for feature extraction
and representation. Each successive layer uses as
input the previous layer output (Bengio 2009).
Table 1: Basic mathematical representation for machine
learning.
ML Method Relation Comments
Supervised
Learning
y = f(x)
x and y are known and the
goal is to learn a model
that approximates
f
Unsupervised
Learning
f(x)
x is given and the goal is to
find
f for a given set of x
Reinforcement
Learning
y = f(x);
r
r is a reward that allows
determination of f in
order to obtain the optimal
y
(Legend: red-colored symbol means unknown data and the
blue-colored symbol means known data)
4.2 Obstacle Classification using
Decision Tree
Decision tree learning uses a decision tree as a
predictive model. A decision tree is a flowchart-like
structure in which each internal node represent a
“test” on an attribute, each branch representing the
outcome of the test while each leaf representing a
class label for classification tree. A tree can be created
by splitting the training set into subset based on an
attribute value test and repeating the process until
each leaf of the tree contains a single class label or we
reach the desired maximum depth. There are multiple
criterion that can be used to divide a node into two
branch, such as the information gain, which consist of
finding the split that would give the biggest
Safe Driving Mechanism: Detection, Recognition and Avoidance of Road Obstacles
101
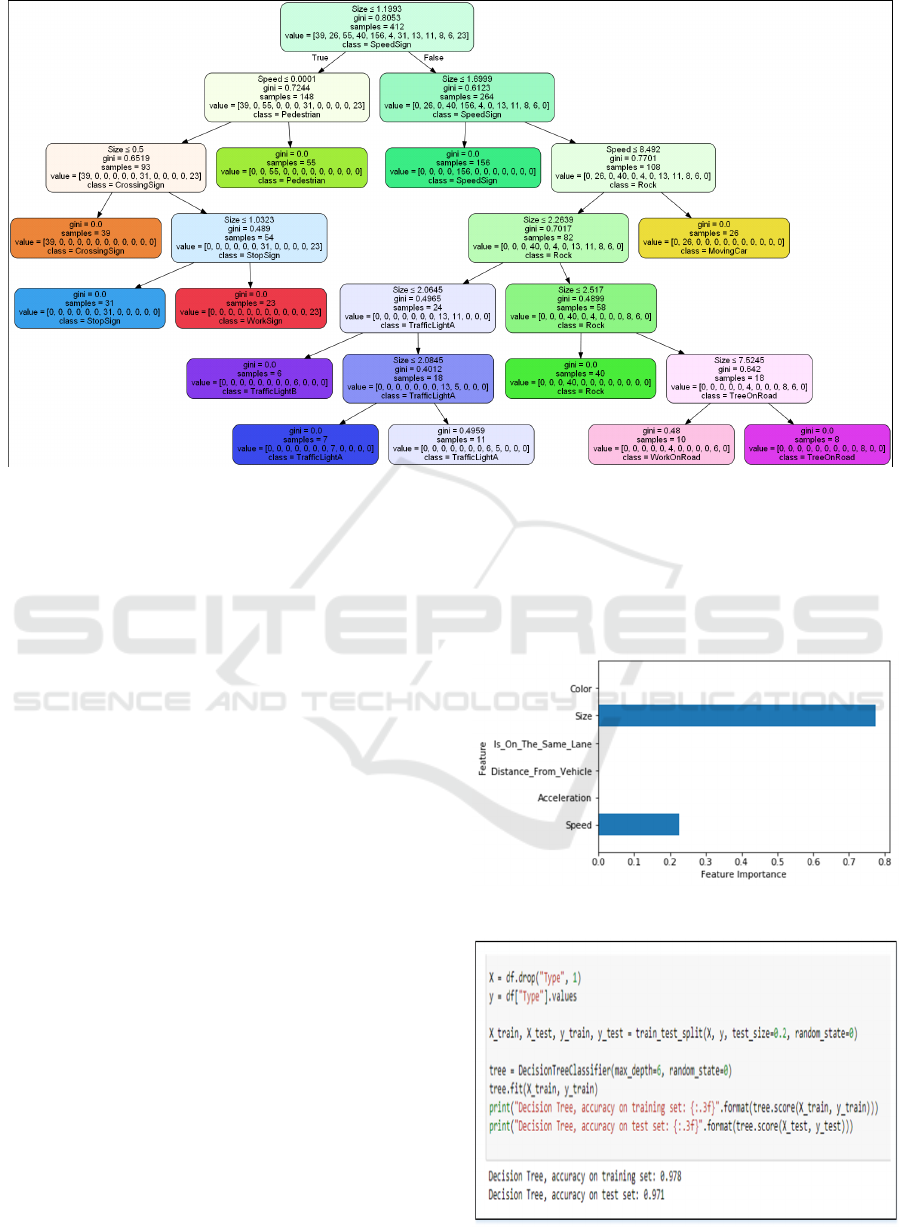
Figure 10: Obstacle classification using decision tree.
information gain, based on the entropy from the
information theory (Witten, Frank et al. 2011).
Figure 10 shows the decision tree created for the
object classification. Gini impurity is a measure of how
often a randomly chosen element from the set would
be incorrectly labeled if it were randomly labeled
according to the distribution of labels in the subset. The
value signifies various obstacles considered and value
= [crossingSign, movingCar, pedestrain, rock,
speedSign, workOnroad, stopSign, traffickLightA,
traffickLightB, treeOnRoad, staticCar, workSign].
Figure 11 shows the feature importance of the
decision tree. As shown, the feature that is most
important for the decision-tree classification
algorithm, as per simulation result, is the obstacle’s
size and speed; all others are not even considered.
Figure 12 shows the decision tree score in the
identification of an obstacle. It uses the data as 80%
for training, 20% for testing. Accordingly, it obtains
97.8% accuracy in identifying obstacles in the
training set and 97.1% in identifying the obstacles
within the test set. The results are satisfactory.
4.3 Obstacle Classification using
K-Nearest Neighbours (KNN)
The k-nearest neighbor algorithm is a simple
algorithm, which consists of selecting for an instance
of data the k-nearest other instances and assigning to
the first instance the most frequent label in the k
instance selected. The value of k is user defined. The
distance can be computed in different ways, such as the
Euclidian distance for continuous variables like ours.
The importance of each neighbor can be weighted;
often the weight used is inversely proportional to the
distance to give more importance to closer neighbor.
Figure 11: Obstacle classification using decision tree.
Figure 12: Decision tree score.
KEOD 2018 - 10th International Conference on Knowledge Engineering and Ontology Development
102

Figure 13 shows the KNN score for the data of
which 80% are used for training, and 20% for testing
for different values of k = [0, 10], k ∈ Ζ.
Figure 13: KNN prediction’s accuracy result for training
and testing with k = 0 to 10.
4.4 Obstacle Classification using
Random Forest
Random Forest is a supervised learning algorithm. It
creates a forest and makes it somehow random. The
“forest” it builds is an ensemble of decision trees,
most of the time trained with the “bagging” method.
The general idea of the bagging method is that a
combination of learning models increases the overall
result (Donges 2018). Figure 14 shows the feature
importance of the random forest.
Figure 14: Features involved in KNN obstacles
classification.
As shown, the feature that is most important for
the random-forest classification algorithm, as per
simulation result, is the obstacle’s size, acceleration,
color and the obstacle’s distance from the referenced
vehicle.
Figure 15 shows the random forest score in the
identification of an obstacle. It uses 70% of the data
for training, and 30% for testing. Accordingly, it
obtains 99.7% accuracy in identifying obstacles in the
training set and 99.4% in identifying the obstacles
within the test set. The results are better than the ones
obtained using decision-tree learning algorithm.
Figure 15: Random Forest score.
4.5 Obstacle Classification using
Multilayer Perceptron
A multilayer perceptron (MLP) is a feedforward
artificial neural network that generates a set of outputs
from a set of inputs. An MLP is characterized by
several layers of input nodes connected as a directed
graph between the input and output layers. MLP uses
back propagation for training the network. MLP is a
deep learning method (Technopedia 2018). Figure 16
shows the feature importance of the MLP classifier.
0
20
40 60 80
Colu mns in weight matrix
Speed
Acceleration
Distance from
Vehicle
Is On the Same Lane
Size
Col or
Input
Feature
Figure 16: MLP Classifier.
Figure 17 shows the MLP score in the
identification of an obstacle. It uses 70% of the data
for training, and 30% for testing. Accordingly, it
obtains 99.7% accuracy in identifying obstacles in the
training set and 99.4% in identifying the obstacles
within the test set. The results are the same as the ones
from random forest learning algorithm
Figure 17: MLP Score.
Safe Driving Mechanism: Detection, Recognition and Avoidance of Road Obstacles
103

6 OBSTACLE AVOIDANCE
After the obstacle detection, the system needs to
avoid the obstacle. This will be done using a
reinforcement learning application, building a
Markov decision process (MDP) (Sutton and Barto
2017). From a mathematical point of view,
reinforcement-learning problems are always
formalized as Markov decision process, which
provides the mathematical rules for decision making
problems, both for describing them and their
solutions. A MDP is composed by five elements, as
shown in Table 2:
Table 2: Basic elements of Markov decision process.
Variable Definition
State
S is the finite set of the possible states in
an environment
T.
Action
A is the possible set of action available for
a state S.
Environment
T(S, A, S’); P(S
’
|A, S) where T represents
the environment model: It is a function
that produces the probability
P of being in
state
S’ taking action A in the state S.
Reward
R(S, A, S’) is the reward given by the
environment for passing from
S’ to S as a
consequence of A
Policy
π(S; A) is the policy of the state (i.e.
The solution of the problem) that takes as
input a state
S and gives the most
appropriate action
A to take.
The hypothesis here is the necessity to create a
Markov Decision Process (MDP) based on
S, A, and r
in order to get a policy
P able to avoid the obstacle in
our environment E.
Action set
A = [Accelerate, Steer]
Reward function r based on the vehicle lane
and collision with obstacles
Possible state set
S (position of the vehicle in
the environment).
The action set is composed of two actions of
steering the vehicle, and accelerate (in a positive or
negative way), while the reward function is based on
the position of the vehicle with respect to the lane and
collision with obstacles:
Positive reward if the vehicle stays on the road
and no collision occurs.
Negative reward if the vehicle is no longer on
the road and a collision is detected.
Finally, the vehicle would at every time
t in
certain state s, represented by the position in the
environment.
6.1 The Reinforcement Learning (RL)
Scene
In order to test a working avoidance system, a new
scene was created. The scene, for simplicity purposes,
is composed of three main actors: a vehicle, an
obstacle and an intended destination. The idea is
simple: the vehicle must avoid (after detecting and
classifying) the obstacle. It must be able to get back
to its right lane afterwards. Figure 18 shows the
intended RL scene. The vehicle would be able to
detect the obstacle (Figure 18(a)), avoid it (Figure
18(b)) and get into its intended destination (Figure
18(c)). With various tests and trials, we are able to
achieve our goal at the end of the process.
(a) Before avoidance of an obstacle
(b) During the avoidance of an obstacle
(c) After the avoidance of an obstacle and approaching its destination
Figure 18: Reinforcement Learning for Obstacle Avoidance: before, during and after the avoidance of obstacle.
KEOD 2018 - 10th International Conference on Knowledge Engineering and Ontology Development
104

6.1.1 Reward Function
The purpose of the reward function is for the vehicle
to avoid the obstacle and return to its intended
destination. Equations 4 and 5 show the reward
functions structure, where collision is a variable
whose value is 1 if the vehicle reaches its target
(intended destination) and 0 if collides with the
obstacle, isOnLane is a variable whose value is 1 as
long as the vehicle is on the road, otherwise its value
is 0. distanceToTarget and previousDistance are
variables updated every frame, representing the
current and the previous distance of the vehicle and
its intended destination.
=
+1=1
+0.1<
−0.05 >
−0.05<+1
−1 =0|| =0
(4)
=
+1=1
+0.05<
−0.05 >
−0.05 <+1
−1=0||=0
(5)
A key point in the reward function is the time
penalty factor: -0.05 for function 1 and -0.01 for
function 2. This small reward is added at every frame,
expressed with mathematical condition t
i
< t
i+1
. The
time penalty factor is used in the RL reward function
implementation, encouraging the agent to move and
reach the target. The best performances were
achieved with function 1, while function 2 showed
high values for reward function but with worst
performances.
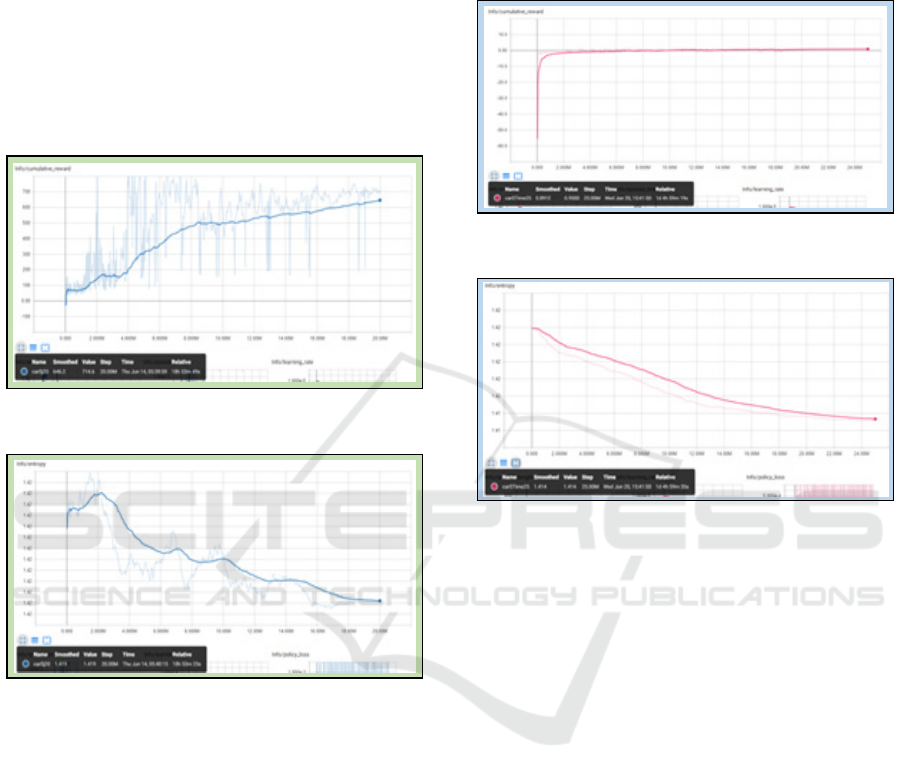
Here, we present the three different training
results. For each result, a graph shows each of the two
most important statistics for the training phase. They
are described below:
1. Cumulative Reward: This is the mean cumulative
episode reward over all agents. It should increase
on a successful training session.
2. Entropy: It describes how random the decisions
of the model are. It should slowly decrease
during a successful training process.
All three trainings were made using same
parameters with only two changes: the reward
function used and the maximum step that fixes the
maximum number of steps for the training phase. The
next discussion focuses on the problems and strong
points in each training phase
6.1.2 Training 1: CarSimpleJ
Here, the first good performances were
accomplished using the following parameters, using
the 2 reward function:
default: trainer: ppo | batch_size: 4096
| beta: 1.0e-4 | buffer_size: 40960 |
epsilon: 0.1 | gamma: 0.99 |
hidden_units: 256 | lambd: 0.95 |
learning_rate: 1.0e-5 | max_steps: 2.5e6
| memory_size: 256 | normalize: false |
num_epoch: 3 | num_layers: 2 |
time_horizon: 64 | sequence_length: 64 |
summary_freq: 1000 | use_recurrent:
false
Figures 19 and 20 show the graphs for the
Cumulative Reward and Entropy of CarSimpleJ.
Here, the key point is that the reward is overall
increasing, but has lot of peaks, both high and low.
This is due to the Entropy that is not decreasing in the
right way. This leads to a behaviour that sometimes
gives us good results, and sometimes not, with the
vehicle either reaching its destination or colliding
with the obstacle.
Figure 19: Cumulative reward for carSimpleJ training.
Figure 20: Entropy for carSimpleJ training.
Compared with previous simulations, this
training, however, is the first one that gives us a
reward that overall was increasing, hence
accomplishing the task. The number of iterations,
however, is small (2.5 million). The results we
obtained here becomes the starting point for other
Safe Driving Mechanism: Detection, Recognition and Avoidance of Road Obstacles
105
simulations given that the parameters for the learning
phase were suitable for the application.
6.1.3 Training 2: CarSimpleJ20
Here, we made some changes on the maximum step
parameter, earlier fixed to 20 million, in order to see
if the reward and entropy would have followed the
correct behaviour. Figures 21 and 22 show the
behaviour of the parameters, highlighting the correct
trend, even with some low peaks for the reward.
Figure 21: Cumulative reward for carSimpleJ20 training.
Figure 22: Entropy for carSimpleJ20 training.
From a numerical point of view, the results were
very satisfying, but the problem was linked to the
vehicle’s behaviour. It was going too slow, taking
positive reward thanks to the fact it was getting closer
to the target destination. After the agent has avoided
the obstacle, it was not, however, able to return on the
correct lane. This overfitting behaviour was due to the
reward given when the target is approaching the
destination being too high relative to the value given
to the final goal to achieve. Note the difference of the
trend in the graph, Entropy for CarSimpleJ and
CarSimpleJ20 (Figure 20 and 22).
6.1.4 Training 3: CarSimpleJ25
The behaviour obtained in the previous simulations
has suggested that a change in the reward function is
necessary. Indeed, Equation 1 was adopted, changing
the value assigned for approaching the target and the
time penalty. In Figures 23 and 24, it is possible to
notice the immediate stabilization of the reward func-
tion, while the entropy is decreasing in the correct way.
Figure 23: Cumulative reward for carSimpleJ25 training.
Figure 24: Entropy for carSimpleJ25 training.
The behaviour is almost perfect, with the agent
able to avoid the obstacle and return in the correct
lane, reaching the intended destination. In this
simulation, the maximum step parameter was set to
25 million.
7 CONCLUSIONS
In this paper, we presented a part of our “Vehicle of
the Future” project in which the vehicle’s intelligent
component is able to detect, identify and avoid a road
obstacle. The knowledge engineering part of this
paper is the systematic detection and identification of
obstacles. Knowledge representation is implemented
using ontology and formal specification. Machine
learning techniques are used to accomplish the goal.
In particular, various supervised learning algorithms
(i.e. decision tree, K-nearest neighbours, random
forest and multilayer perceptron) are used for
identification of obstacles, and experimental results
of classification are satisfactory. Intelligent avoidan-
ce of obstacle is being implemented via reinforcement
learning, using Markov decision process. Future
works involve the implementation of reinforcement
KEOD 2018 - 10th International Conference on Knowledge Engineering and Ontology Development
106

learning in avoiding various obstacles such as moving
and static vehicles, and pedestrians, among others.
REFERENCES
Bazilinskyy, P., N. Heisterkamp, P. Luik, S. Klevering, A.
Haddou, M. Zult and J. de Winter (2018). Eye
movements while cycling in GTA V. Tools and Methods
of Competitive Engineering (TMCE 2018). Las Palmas
de Gran Canaria, Spain.
Bengio, Y. (2009). Learning Deep Architectures for AI.
Montreal, Canada, Université de Montréal.
Bertozzi, M., L. Bombini, et al (2008). Obstacle detection
and classification fusing radar and visio. 2008 IEEE
Intelligent Vehicles Symposium: 608 - 613.
Bevilacqua, A. and S. Vaccari (2007). Real time detection of
stopped vehicles in traffic scenes. IEEE International
Conference on Advanced Video Signal Based
Surveillance, London, UK.
Coelingh, E., A. Eidehall and M. Bengtsson (2010). Collision
warning with full auto brake and pedestrian detection-a
practical example of automatic emergency braking. 13
th
IEEE International Conference on Intelligent
Transportation Systems (ITSC): 155-160.
Donges, N. (2018). "The Random Forest Algorithm." from
https://towardsdatascience.com/the-random-forest-
algorithm-d457d499ffcd.
Fernandez, S., R. Hadfi, T. Ito, I. Marsa-Maestre and J. R.
Velasco (2016). "Ontology-Based Architecture for
Intelligent Transportation Systems Using a Traffic
Sensor Network." Sensors 16(8).
Game_Engine. (2016). "Unity 3D." from https://unity3d.
com/.
García, F., A. de la Escalera and J. M. Armingol (2013).
Enhanced obstacle detection based on Data Fusion for
ADAS applications. 16
th
IEEE Conference on Intelligent
Transportation Systems (ITSC): 1370-1375.
Hina, M. D., C. Thierry, A. Soukane and A. Ramdane-Cherif
(2017). Ontological and Machine Learning Approaches
for Managing Driving Context in Intelligent
Transportation. KEOD 2017, 9th International
Conference on Knowledge Engineering and Ontology
Development, Madeira, Portugal.
Iqbal, A., C. Busso and N. R. Gans (2015). Adjacent Vehicle
Collision Warning System using Image Sensor and
Inertial Measurement Unit. 2015 ACM International
Conference on Multimodal Interaction.
Ithape, A. A. (2017). Artificial Intelligence and Machine
Learning in ADAS. Vector India Conference 2017. Pune,
India.
Kannan, S., A. Thangavelu and R. Kalivaradhan (2010). "An
Intelligent Driver Assistance System (I-DAS) for
Vehicle Safety Modeling Using Ontology Approach."
Intl Journal of Ubiquitous Computing 1(3): 15 – 29.
Lan, J., Y. Jiang, G. Fan, D. Yu and Q. Zhang (2016). "Real-
time automatic obstacle detection method for traffic
surveillance in urban traffic." Journal of Signal
Processing Systems 82(3): 357-371.
Lee, D. and H. Yeo (2016). "Real-Time Rear-End Collision-
Warning System Using a Multilayer Perceptron Neural
Network." IEEE Transactions on Intelligent
Transportation Systems 17(11): 3087-3097.
Levi, D., N. Garnett, E. Fetaya and I. Herzlyia (2015).
StixelNet: A Deep Convolutional Network for Obstacle
Detection and Road Segmentation. British Machine
Vision Conference 2015.
Linzmeier, D., M. Skutek, M. Mekhaiel and K. Dietmayer
(2005). A pedestrian detection system based on
thermopile and radar sensor data fusion. 8th International
Conference on Information Fusion.
Louridas, P. and C. Ebert (2016). "Machine Learning." IEEE
Software 33(5): 110-115.
Lv, Y., Y. Duan, W. Kang, Z. Li and F.-Y. Wang (2015).
"Traffic flow prediction with big data: A deep learning
approach." IEEE Transactions on Intelligent
Transportation Systems 16(2): 865 - 873.
Mitchell, T. (1997). Machine Learning, McGraw Hill.
Protégé. (2016). "Protégé: Open-source ontology editor."
from http://protege.stanford.edu.
Pyo, J., J. Bang and Y. Jeong (2016). Front collision warning
based on vehicle detection using CNN. 2016 Intl SoC
Design Conference (ISOCC), Jeju, Korea.
ResearchNews (2013). Key Technologies for Preventing
Crashes, Berkshire, U.K, Thatcham.
Rummelhard, L., A. Nègre, M. Perrollaz and C. Laugier
(2016). Probabilistic grid-based collision risk prediction
for driving application, Springer.
Saxena, A. (2017). "Machine Learning Algorithms in
Autonomous Cars." Retrieved 27 September 2017, from
http://visteon.bg/2017/03/02/machine-learning.
Shinzato, P. Y., D. F. Wolf and C. Stiller (2014). Road terrain
detection: Avoiding common obstacle detection
assumptions using sensor fusion. IEEE Intelligent
Vehicles Symposium Proceedings.
Sutton, R. S. and A. G. Barto (2017). Reinforcement
Learning: An Introduction (Second Edition), MIT Press.
Tchankue, P., J. Wesson and D. Vogts (2013). Using
Machine Learning to Predict Driving Context whilst
Driving. SAICSIT 2013, South African Institute for
Computer Scientists and Information Technologists. East
London, South Africa: 47-55.
Technopedia. (2018). "Multilayer Perceptron (MLP)." from
https://www.techopedia.com/
Wang, X., L. Xu, H. Sun, J. Xin and N. Zheng (2014). Bionic
vision inspired on-road obstacle detection and tracking
using radar and visual information. 17
th
IEEE
International Conference on Intelligent Transportation
Systems (ITSC): 39–44.
Wolcott, R. W. and R. Eustice (2016). Probabilistic Obstacle
Partitioning of Monocular Video for Autonomous
Vehicles. British Machine Vision Conference 2016.
World_Health_Organization. (2017). "Global Health
Observatory (GHO) data." from http://www.who.int/
gho/road_safety/mortality/number_text/en/.
Zeng, D., J. Xu and G. Xu (2008). "Data fusion for traffic
incident detection using D-S evidence theory with
probabilistic SVMs." Journal of Computers 3(10): 36–
43.
Safe Driving Mechanism: Detection, Recognition and Avoidance of Road Obstacles
107
